![]()
Cand vorbim despre performantele unui automobil putem face referire la multele asteptari pe care le avem de la acest mijloc de transport, devenit o necesitate si o prezenta permanenta in activitatea zilnica a tot mai multor oameni. Putem vorbi despre performantele unui anumit automobil sau a unei clase de automobile similare facand referire la performantele de accelerare sau franare, la performantele de consum sau confortabilitate, la performantele de siguranta in deplasare sau de maniabilitate, la capacitatea de trecere, s.a.m.d.
Performantele dinamice ale unui automobil arata limitele pe care acesta le atinge in timpul unor solicitari de intensitate maxima, cum sunt acceleratia maxima sau deceleratia maxima, timpul si spatiul de demarare, timpul si spatiul de franare, vitezele critice de aparitie a alunecarii sau deraparii etc., ca si unele performante care sunt urmari ale dorintei de a transforma automobilul 'in a doua casa', dorinte legate de confort, de acustica, de siguranta pasiva si activa, de economicitate.
In acest capitol, sunt analizate performantele automobilului legate de procesele de accelerare si de franare, performantele de conducere si stabilitate urmand a fi analizate in capitolele urmatoare.
![]()
1.Demararea automobilului
Studiul procesului de demarare are ca obiectiv sa determine metodologia de calcul a timpului si spatiului de demarare ale automobilului pana la atingerea vitezei maxime sau, mai nou, pana la atingerea vitezei de 100 km / h. Cu ajutorul acestor marimi pot fi comparate performantele de accelerare pe care un automobil nou proiectat le poate dezvolta in comparatie cu cele realizate de solutiile similare.
Pentru inceput se utilizeaza ecuatia de miscare a automobilului, exprimata de realatia 2.7.:
FR
= f . Ga . cos + Ga . sin c + k .A.Va2 + ![]()
![]() (1.1.)
(1.1.)
Datele initiale sunt: greutatea totala a automobilului Ga, caracteristica exterioara a motorului, raza dinamica rd si raza statica rs a pneului, coeficientul rezistentei la rulare f, coeficientul aerodinamic k, aria sectiunii transversale maxime A, coeficientul de influenta a maselor aflate in miscare de rotatie , randamentul total al transmisiei t, marimea rapoartelor de transmitere din cutia de viteze icvk si raportul de transmitere al transmisiei principale i0. De obicei demarajul automobilului se studiaza pe drum orizontal, motorul dezvoltand parametrii corespunzatori caracteristicii exterioare (la sarcina totala).
![]()
1.1. Caracteristica fortei la roata
Caracteristica fortei la roata sau caracteristica de tractiune reprezinta dependenta grafica dintre forta la roata FR si viteza Va de deplasare a automobilului.
Caracteristica fortei la roata se obtine din caracteristica exterioara a motorului utilizand relatiile cunoscute in treapta k, pentru calculul fortei la roata -FRk si pentru viteza automobilului- Vk:
![]()
![]() (1.2.)
(1.2.)
in care Me reprezinta momentul efectiv al motorului iar e este viteza unghiulara efectiva a arborelui cotit.
Forma caracteristicii fortei la roata pentru un automobil avand in cutia de viteze 4 trepte, este prezentata in figura 1.1.
![]() FR
FR

![]() [N] FR1
[N] FR1

![]() FR2
FR2
FR3
![]()
![]() FR4
FR4
![]()
Va[ms]
Fig.1.1. Caracteristica fortei la roata
Pentru o viteza oarecare V a automobilului, fig.1.2., se duce o dreapta verticala care intersecteaza graficele rezistentei la rulare Rr, rezistentei la panta Rp, rezistentei aerului Ra si fortei la roata Fr, respectiv in punctele b,c,d, si e. Pentru viteza V aleasa segmentul de reprezinta, la scara, forta la roata disponibila pentru accelerarea automobilului Intersectia curbei Rr+Ra cu graficul fortei la roata in

![]() FR
FR
![]() [N] FR1
[N] FR1

![]() FR2
FR2
![]()
![]()
 FR3
FR3
![]() e FR4
e FR4
![]()
 Rr+Ra
Rr+Ra
![]()
![]()
![]() Rr+Rp+Ra f
Rr+Rp+Ra f
d
![]() c Rp
c Rp
![]() b Rr
b Rr
![]() a
a
V Vmax V[ms]
Fig.1.2.Exemplu de folosire a caracteristicii de tractiune
treapta a IV a, in punctul f, marcheaza abscisa corespunzatoare vitezei maxime a automobilului Vmax. Daca suma rezistentelor la inaintare creste punctul f se va deplasa spre stanga, odata cu micsorarea vitezei maxime a automobilului.
Variatia parabolica a curbelor fortei la roata FR este determinata de caracterul variatiei momentului motorului functie de turatie din caracteristica exterioara a motorului. Coeficientul rezistentei la rulare f, in domeniul vitezelor uzuale, este practic constant si de aceea rezistenta la rulare Rr este reprezentata printr-o dreapta orizontala, paralela cu axa absciselor. Rezistenta la urcarea pantelor Rp nu depinde de viteza, deci se reprezinta tot printr-o dreapta paralela cu axa absciselor. Rezistenta aerului Ra este reprezentata printr-o curba de gradul al doilea [Ra = f(V2)].
La viteza oarecare V, segmentele marcate pe diagrama din fig. 1.2. sunt proportionale cu urmatoarele forte:
![]() - rezistenta la rulare
- rezistenta la rulare
![]() -
rezistenta la panta
-
rezistenta la panta
![]() -
rezistenta totala a drumului cu rezistenta specifica y = f cos a sin a
-
rezistenta totala a drumului cu rezistenta specifica y = f cos a sin a
![]() - rezistenta aerului
- rezistenta aerului
![]() - forta la roata
corespunzatoare vitezei V.
- forta la roata
corespunzatoare vitezei V.
Fig. 5.10
Deoarece forta la roata FR trebuie sa
echilibreze totdeauna suma fortelor de rezistenta inseamna
ca segmentul de, care
reprezinta marimea fortei disponibile pentru demarare Rd
va fi:
![]() .
.
Fig. 5.7
Punctul f caracterizeaza regimul la care automobilul trece de la o
miscare accelerata la una uniforma, a carei
acceleratie este egala cu zero. Si de aici se poate constata ca abscisa punctului f determina viteza maxima pe
calea de rulare cu rezistenta totala a drumului y
Pentru rezolvarea problemelor legate de procesul de accelerare se utilizeaza ecuatia de miscare a automobilului, data de relatia 2.7., scrisa sub forma:
![]() (1.3.)
(1.3.)
In partea stanga a relatiei 1.3. se afla numai termeni care nu depind de greutatea automobilului, acestia reprezentand forta disponibila sau forta excedentara Fex care poate fi folosita la invingerea rezistentei drumului si la accelerarea automobilului.
Pentru construirea caracteristicii fortei la roata se recomanda utilizarea tabelului 1.1.
Tabelul 1.1.Valori pentru construirea caracteristicii fortei la roata
|
Nr.crt |
n(rot/min) |
n0 |
nM |
nec |
np |
nmax(nr) |
|||
|
ω(rad/s) | |||||||||
|
Me (N.m) | |||||||||
|
FR1= | |||||||||
|
Va1= | |||||||||
|
FR2= | |||||||||
|
Va2= | |||||||||
|
..... |
![]()
1.2.Caracteristica dinamica
Aprecierea calitatilor dinamice ale automobilului se poate face cu ajutorul factorului dinamic D, care este un parametru adimensional, definit ca raportul dintre forta de tractiune excedentara (Fex = Fr - Ra ) utilizata la invingerea rezistentelor la inaintare si greutatea totala a automobilului, Ga:
 (1.)
(1.)
de unde rezulta :
![]() (1.5.)
(1.5.)
unde : ![]() -
este rezistenta specifica la rulare;
-
este rezistenta specifica la rulare;
![]() -
este rezistenta specifica la urcarea pantei;
-
este rezistenta specifica la urcarea pantei;
![]() -
rezistenta specifica la demarare.
-
rezistenta specifica la demarare.
Expresia factorului dinamic mai poate fi scrisa si sub forma :
D
= ![]() (1.6.)
(1.6.)
unde: = f . cos + sin ., este coeficientul rezistentei totale a drumului.
Daca
miscarea automobilului este uniforma (![]() =0
) relatia 1.6. devine:
=0
) relatia 1.6. devine:
D = (1.7.)
La viteza maxima, pe cale de rulare orizontala ( =0) factorul dinamic D se calculeaza cu relatia:
D = f (1.8.)
Factorul dinamic, asa cum este definit, permite compararea performantelor automobilelor, raportate la greutatea lor totala, la proprietatile aerodinamice si la
![]() D
D
![]()
![]()
![]()
![]() DI D
DI D
![]()
II D
![]()
![]()
![]()
![]()
![]() DII
DII ![]() III
III
![]() hI
hI
![]() II hII DIII
II hII DIII
![]() ψIII
ψIII
![]()
![]() Ψ1V I
Ψ1V I
![]()
![]()
![]()
![]()
![]() f ψIV DIV
f ψIV DIV
f f
![]()
VI min Vx Vmax V(m/s) Fig.1.2.Caracteristica dinamica
forta disponibila la roata motoare.
Caracteristica dinamica a automobilului reprezinta dependenta grafica dintre factorul dinamic D si viteza V, pentru toate treptele cutiei de viteze, conform graficului din figura 1.2.
Factorul dinamic si caracteristica dinamica se utilizeaza la rezolvarea problemelor referitoare la stabilirea unor performante ale automobilului, cum sunt: viteza maxima, panta maxima , rezistenta totala maxima a drumului si valoarea maxima a aderentei.
Viteza maxima a automobilului rezulta la intersectia dintre curba factorului dinamic corespunzatoare treptei de priza directa, iCV = 1 si o paralela la abscisa, dusa la inaltimea f , conform relatiei 1.8..
Rampa maxima pe care o poate urca automobilul este diferita in functie de treapta cuplata in cutia de viteze si depinde de valoarea maxima a coeficientului rezistentei totale a drumului max , conform relatiei 1.6..Panta maxima se determina ca solutie a ecuatiei:
max = f . cos max + sin .max (1.9.)
adica: max = 2 arctg
O alta metoda de calcul a rampei maxime pe care o poate urca automobilul cu o viteza constanta, intr-o anumita treapta a cutiei de viteze, se determina cu relatia :
D = f . cosα + sinα ≈ f + h % (1.10)
de unde:
h = D - f (1.11.)
unde h reprezinta inaltimea pantei in procente.
Pe caracteristica dinamica la o valoare a coeficientului rezistentei la rulare f, se determina marimea h a rampei pe care automobilul o poate urca, cu o viteza constanta, precum si treapta cuplata din cutia de viteze, ca diferenta dintre curba factorului dinamic si ordonata de marimea f (fig.1.2. ).
Rezistenta totala maxima a drumului ψmax se determina cu ajutorul relatiei 1.7. si ea poate fi determinata pentru orice viteza de deplasare a automobilului, conform figurii 1.2. De exemplu pentru viteza Vx marimea coeficientului rezistentei totale a drumului este IV
Problema poate fi pusa si invers, in sensul ca , daca se cunoaste valoarea coeficientului rezistentei totale a drumului max , se poate determina viteza maxima pe care automobilul o poate atinge pe acel drum, ca si treapta care trebuie cuplata pentru a se atinge acea viteza.
Caracteristica dinamica poate fi folosita la determinarea aderentei maxime a automobilului, stiut fiind ca deplasarea automobilului se poate face daca se respecta dubla inegalitate:
R ≤ FR ≤ . Zr (1.12.)
in care: R reprezinta suma tuturor rezistentelor la inaintare; este coeficientul de aderenta; Zr reprezinta reactiunea verticala la puntea motoare.
Forta maxima la roata, FRmax , este limitata de aparitia patinarii rotilor pe cale, adica:
FRmax = . Zr (1.13.)
Cu aceast observatie, tinand seama ca la limta aderentei viteza automobilului devine constanta, din relatia 1. se obtine expresia:
D ![]() (1.1)
(1.1)
Daca se tine seama ca patinarea rotilor motoare apare la viteze reduse, cand forta la roata este maxima si, in consecinta, se neglijeaza rezistenta aerului, rezulta:
D  (1.15.)
(1.15.)
Curbele corespunzatoare factorului dinamic D la limita aderentei, figura 1.2., indica limitele posibile de deplasare, fara aparitia patinarii rotilor motoare, ca si treapta de viteza care poate fi cuplata pentru a se asigura acest lucru. Pentru fiecare treapta de viteza valorile factorului dinamic D situate deasupra curbei D nu pot fi utilizate, deoarece apare patinarea rotilor motoare pe drum. Din relatia 1.15. se poate observa ca aderenta cea mai buna o au automobilele cu tractiune integrala la care, pentru aceleasi valori ale coeficientului de aderenta , curbele D sunt situate mai sus decat curbele D, ceea ce arata ca aceasta categorie de automobile are o dinamica mai buna in comparatie cu automobilele echipate cu transmisie 4x2.
Caracteristica dinamica se construieste din caracteristica fortei la roata si, in acest sens, se recomanda utilizarea algoritm:ului din tabelul 1.2.
Tabelul 1.2.Valori pentru construirea caracteristicii dinamice
|
Nr.crt |
n(rot/min) |
n0 |
nM |
nec |
np |
nmax(nr) |
|||
|
ω(rad/s) | |||||||||
|
Me (N.m) | |||||||||
|
V1= | |||||||||
|
V12 | |||||||||
|
D1 = | |||||||||
|
V2= | |||||||||
|
V22 | |||||||||
|
D2 = | |||||||||
![]()
1.3. Caracteristica acceleratiilor
Caracteristica acceleratiilor reprezinta dependenta grafica dintre acceleratia automobilului si viteza sa de deplasare.
Acceleratia automobilului la deplasarea pe calea de rulare cu rezistenta specifica y rezulta din expresia factorului dinamic, data de relatia 1.6.
![]() (1.16.)
(1.16.)
Tinand seama ca factorul dinamic are valorile limitate de catre marimea aderentei, relatia 1.1, rezulta ca si valorile maxime ale acceleratiei vor fi limitate de catre aderenta. In acest sens acceleratia, la limita aderentei, se calculeaza cu relatia:
a ![]() (1.17.)
(1.17.)
Caracteristica acceleratiilor se construieste pornind de la caracteristica dinamica, calculand, pentru fiecare valoare a factorului dinamic, valoarea acceleratiei corespunzatoare, cu ajutorul relatiei:
ak= (Dk - ![]() (1.18.)
(1.18.)
in care: ak reprezinta acceleratia intr-o treapta oarecare k a cutiei de viteze; Dk este factorul dinamic in treapta k, iar k reprezinta coeficientul maselor aflate in miscare de rotatie, in treapta k ( intr-o prima etapa, pentru calculul coeficientului , poate fi folosita relatia 2.3.1).Graficul caracteristicii acceleratiilor este prezentat in figura 1.3., curbele acceleratiilor fiind asemanatoare cu curbele factorului dinamic.
![]()
a(m/s)

![]() a1
a1
aII
aIII
![]()
aIV
![]()
Vmax V(m/s)
Fig.1.3. Caracteristica acceleratiilor
Din graficul acceleratiilor se pot determina diverse marimi care caracterizeaza regimul de demarare, ca de exemplu viteza maxima a automobilului, la care acceleratia se anuleaza, viteza maxima sau minima in fiecare treapta, etc.
![]()
1.Caracteristica timpului de demarare
Timpul de demarare se defineste ca fiind timpul necesar automobilului, pentru a atinge viteza maxima, pornind de pe loc. In acest caz motorul functioneaza pe caracteristica exterioara iar schimbarea treptelor de viteze se face instantaneu.
![]()
![]() (s2 /m)
(s2 /m)
![]()
![]() 1/a4
1/a4
![]()
![]()
 1/a3
1/a3
![]()
![]()
![]() 1/a2
1/a2
![]()
![]()
![]()
![]() 1/a1
1/a1
![]()
![]()
![]()
Δ1 Δ2 Δ3 Δ4 Δn Vmax
![]() V(m/s)
V(m/s)
V0 V1 V2 V3 V4 Vn-1 0,9Vmax =Vn
Fig.1.Caracteristica inversului acceleratiilor
Pentru calculul timpului de demarare se porneste de la definitia acceleratiei:
a = ![]() (1.19.)
(1.19.)
Din aceasta relatie se deduce expresia timpului de demarare td:
td = ![]() (1.20.)
(1.20.)
in care V0 si 0,9Vmax sunt vitezele de la inceputul, respectiv sfarsitul demarajului. Integrarea se face pana la 0,9 din Vmax deoarece la Vmax acceleratia este zero, iar inversul sau tinde catre infinit.
Deoarece functia a = f (Va) nu este cunoscuta pentru rezolvarea integralei din relatia 1.20. se recurge la metoda grafo-analitica, care presupune construirea caracteristicii inversului acceleratiilor, fig.1., adica a dependentei grafice dintre inversul acceleratiilor si viteza de deplasare a automobilului.. Aceasta caracteristica se construieste din graficul acceleratiilor, calculand pentru fiecare valoare a acceleratiei valoarea inversului acceleratiei respective.
Dupa construirea graficului inversului acceleratiilor trebuie calculata aria suprafetei cuprinse intre curbele inversului acceleratiilor si abscisa. Aceasta suprafata, la scara de reprezentare aleasa, reprezinta timpul de demarare al automobilului, care, pornind de pe loc, atinge viteza Vn=0,9 Vmax. La viteza maxima a automobilului acceleratia este zero iar inversul ei este infinit, astfel incat curba respectiva tinde asimptotic catre verticala corespunzatoare vitezei maxime Vmax.
Pentru calculul ariilor de sub curbele inversului acceleratiilor se imparte intervalul V0-Vmax intr-un numar suficient de mare de intervale, toate avand aceeasi marime ΔV. Alegerea intervalelor trebuie astfel facuta incat punctele de divizare sa treaca prin punctele de intersectie ale curbelor inversului acceleratiilor. In acest fel functia inversului acceleratiilor nu va prezenta discontinuitati.
La viteza maxima, inversul acceleratiei fiind infinit calculul timpului de demarare se va face pana la o valoare arbitrara ,0,9 Vmax, ca in figura 1. Pentru calculul timpului de demarare trebuie efectuat calculul integralei din relatia 1.20, pentru a carei rezolvare se aplica metoda numerica aproximativa. Aceasta permite folosirea proprietatii integralei definite de a fi calculata pe subintervale si de a insuma valorile astfel obtinute:
![]()
![]()
![]()
![]()
![]() (1.21.)
(1.21.)
Fiecare integrala din suma de mai sus poate fi calculata, cu aproximatie, prin lipsa sau prin adaos, cu relatia:
![]() <
< ![]() <
< ![]() (1.22.)
(1.22.)
O buna aproximare a fiecarei integrale se obtine folosind expresia:
![]()
![]() (1.23.)
(1.23.)
unde
![]() reprezinta media aritmetica a
valorilor inversului acceleratiilor la capetele fiecarui interval de
marime V, astfel ca se poate scrie
relatia:
reprezinta media aritmetica a
valorilor inversului acceleratiilor la capetele fiecarui interval de
marime V, astfel ca se poate scrie
relatia:
![]()
 (1.2)
(1.2)
Cu aceasta observatie se poate calcula timpul de demaraj total cu ajutorul expresiei:
td=![]()
 (1.25)
(1.25)
Pentru calculul efectiv al timpului de
demarare al automobilului, pornind de la aceasta relatie, cu ajutorul
graficului inversului acceleratiilor, prezentat in figura 1., se
calculeaza aria fiecarui interval V1, V2, V3,. Vn.(
fiecare interval poate fi considerat ca un trapez dreptunghic a carui arie
se calculeaza cu relatia: A=![]() in care B reprezinta
inversul acceleratiei la un capat al intervalului, b reprezinta
inversul acceleratiei la celalalt capat al intervalului, iar h
reprezinta distanta dintre valorile inversului acceleratiilor de
la capetele intervalului V considerat).
Fiecare arie calculata astfel reprezinta, la scara aleasa pentru
reprezentare (1m/s=C mm, 1s2/m=D mm) timpul de demarare propriu
fiecarui interval calculat.
in care B reprezinta
inversul acceleratiei la un capat al intervalului, b reprezinta
inversul acceleratiei la celalalt capat al intervalului, iar h
reprezinta distanta dintre valorile inversului acceleratiilor de
la capetele intervalului V considerat).
Fiecare arie calculata astfel reprezinta, la scara aleasa pentru
reprezentare (1m/s=C mm, 1s2/m=D mm) timpul de demarare propriu
fiecarui interval calculat.
Timpul total de demarare va rezulta din insumarea timpilor calculati conform metodologiei indicate mai sus. Caracteristica timpului de demaraj este prezentata in figura 1.5.
Pentru autoturisme firmele constructoare precizeaza timpul si spatiul de demarare in care este atinsa viteza de 100 km/h, fapt care permite compararea acestor performante la automobile asemanatoare.
![]()
1.5. Caracteristica spatiului de demarare
Caracteristica de demarare reprezinta dependenta grafica dintre spatiul de demarare si viteza automobilului. Prin spatiu de demarare se defineste spatiul parcurs de automobil in timpul demarajului. Pentru calculul spatiului de demarare se foloseste relatia de definitie a vitezei:
V=![]() (1.26.)
(1.26.)
de unde se deduce expresia de calcul a spatiului elementar:
dS =V . dt (1.27.)
Spatiul de demarare total se va calcula cu relatia:
Sd
=![]() (1.28.)
(1.28.)
Pentru determinarea legii de dependenta a vitezei in functie de timp integrala data de relatia 1.28. se calculeaza asemanator cazului anterior, folosind metoda numerica aproximativa. Astfel se poate scrie relatia:
Sd = ![]() +
+![]() +
+![]() +
+![]() +..+
+..+![]() (1.29)
(1.29)
Fiecare integrala din suma poate fi calculata cu aproximatie, prin lipsa sau prin exces, cu relatia:
Vi. Δt < ![]() < Vi+1. Δt (1.30.)
< Vi+1. Δt (1.30.)
O buna aproximare a fiecarei integrale se obtine din expresia:
![]() ≈ Vimed . Δt (1.31.)
≈ Vimed . Δt (1.31.)
unde: Vimed
=![]() , vitezele Vi ,respectiv Vi+1 sunt
vitezele automobilului la capetele intervalului Δt. Cu aceasta
observatie se poate scrie urmatoarea ecuatie de calcul a
spatiului de demarare:
, vitezele Vi ,respectiv Vi+1 sunt
vitezele automobilului la capetele intervalului Δt. Cu aceasta
observatie se poate scrie urmatoarea ecuatie de calcul a
spatiului de demarare:
Sd =![]() = Δt .
= Δt .![]() (1.32.)
(1.32.)
![]() td(s)
td(s)
![]()
![]()
![]()
 tn
tn
Δt Δn
tn-1
![]() Δt Δn-1
Δt Δn-1
![]()
![]() t3
t3
Δt Δ3
![]()
![]() t2
t2
Δt Δ2
![]()
![]() t1
t1
Δt Δ1
![]() V1min V1 V2 Vn Vmax V(m/s)
V1min V1 V2 Vn Vmax V(m/s)
Fig.1.6. Caracteristica timpului de demarare
Pentru calculul efectiv al spatiului de
demarare al automobilului, pornind de la aceasta relatie, cu ajutorul
graficului timpului de demarare, prezentat in figura 1.6. se calculeaza
aria fiecarui interval Δ1, Δ2, Δ3,.
Δn.( fiecare interval poate fi considerat ca un trapez dreptunghic a
carui arie se calculeaza cu relatia: A=![]() , B reprezinta viteza automobilului la un capat al
intervalului, b reprezinta viteza la celalalt capat al
intervalului, iar h reprezinta distanta Δt de la capetele
intervalului Δi considerat).Fiecare arie calculata astfel
reprezinta, la scara aleasa pentru reprezentare, spatiul de
demarare propriu fiecarui interval calculat.
, B reprezinta viteza automobilului la un capat al
intervalului, b reprezinta viteza la celalalt capat al
intervalului, iar h reprezinta distanta Δt de la capetele
intervalului Δi considerat).Fiecare arie calculata astfel
reprezinta, la scara aleasa pentru reprezentare, spatiul de
demarare propriu fiecarui interval calculat.
Astfel spatiul de demarare S1 pentru a ajunge de la viteza V1 min (viteza minima stabila de deplasare a automobilului in treapta I-a, corespunde functionarii motorului la turatia de moment motor maxim- nM) la viteza V1 va fi:
S1
= Δt. ![]() (1.
29.)
(1.
29.)
Spatiul necesar pentru demarare de la viteza V1 min la viteza V2 va fi:
S2 = Δt. ![]() (1.30)
(1.30)
Din insumarea spatiilor de demarare intermediare va rezulta spatiul total de demarare care se va calcula cu relatia:
Sd = Δt. ![]() (1.31.)
(1.31.)
Tinand seama de metodologia indicata se poate construi caracteristica spatiului de demarare, care este reprezentata in figura 1.6.
Sd (m)
![]()
S100
![]()
![]() V1min 27,7 Vmax V(m/s)
V1min 27,7 Vmax V(m/s)
Daca in calculele de proiectare a unui nou automobil s-au determinat timpul si spatiul de demarare trebuie ca aceste valori, corespunzatoare vitezei de 100km/h , sa fie comparate cu aceleasi marimi pe care le au solutiile similare de automobile. Daca apar diferente importante intre valorile calculate si cele ale solutiilor similare trebuie ca intreg calculul sa fie reluat, facandu-se schimbari ale parametrilor initiali alesi sau a coeficientilor utilizati.
![]()
![]() 2.Franarea automobilului
2.Franarea automobilului
Procesul de franare este extrem de important pentru siguranta in deplasare a automobilului si pentru stabilitatea sa.. Se apreciaza ca franarea optima se obtine prin dezvoltarea unor forte de franare care sa asigure, indiferent de conditiile de deplasare si de starea de incarcare a automobilului, reducerea vitezei de deplasare pana la oprire, daca este cazul, cu pastrarea traiectoriei de deplasare si a aderentei rotilor cu calea de rulare.
![]()
2.1.Echilibrul rotii franate
Pentru studiul miscarii rotii franate se aplica metoda izolarii corpurilor, ca si in cazul studiului echilibrului rotii nemotoare (paragraful 2.1.1.) sau al rotii motoare (paragraful 2.6.).
Asupra rotii franate actioneaza momentul de franare Mf ,opus vitezei unghiulare ω, produs de mecanismul de franare din roata. Articulatia de legatura dintre roata si punte este inlocuita cu doua forte care actioneaza in axa rotii, pe doua directii perpendiculare si anume: o forta Gr perpendiculara pe calea de rulare, care reprezinta partea din greutatea automobilului care revine rotii in timpul franarii si o alta forta, Ff , paralela cu calea de rulare, care reprezinta forta cu care puntea automobilului actioneaza asupra rotii franate. Ca urmare a actiunii acestor forte in suprafata de contact roata-drum apar reactiunile verticala-Zr si tangentiala-X. Datorita repartitiei neuniforme a fortelor de presiune dintre pneu si calea de rulare (vezi subcapitolul 2.1.) reactiunea Zr este deplasata fata de axa rotii, spre sensul de inaintare al automobilului, cu distanta a.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Ecuatia de echilibru de momente si ecuatiile de
echilibru de forte pe directie perpendiculara, respectiv
paralela cu drumul, vor fi:
Ecuatia de echilibru de momente si ecuatiile de
echilibru de forte pe directie perpendiculara, respectiv
paralela cu drumul, vor fi:
![]()
![]() Mf + Zr .a -- X . rd = 0 Mf
Mf + Zr .a -- X . rd = 0 Mf
![]() ωr Va
ωr Va
Ff ─X = 0 (2.1) Ff
Zr ─ Gr = 0 rd Gr Zr
Prin impartirea intregii ecuatii
de momente cu marimea rd se obtine: X X
a Zr
X
= ![]() + Zr .
+ Zr . ![]() (2.2.)
(2.2.)
Fig.2.1.Echilibrul rotii franate
Tinand
seama de ecuatiile de forte din relatiile 2.1. si de
expresia coeficientului rezistentei la rulare f = ![]() rezulta:
rezulta:
Ff
= ![]() (2.3.)
(2.3.)
Forta de franare Ff este forta cu care roata franata actioneaza asupra puntii automobilului, producand decelerarea acestuia. Daca notam cu Ffr forta de franare la roata, pe care o dezvolta mecanismul de franare prin momentul de franare Mf, aceasta se va calcula cu relatia:
Ffr
= ![]() (2.)
(2.)
Stiind ca produsul f . Zr este egal cu rezistenta la rulare Rr se obtine relatia de legatura dintre forta de franare Ff si forta de franare la roata Ffr:
Ff = Ffr + Rr (2.5.)
Asadar se poate arata ca forta cu care roata franata actioneaza asupra puntii automobilului este egala cu suma dintre forta de franare la roata, pe care o dezvolta mecanismul de franare din roata si rezistenta la rulare, proprie rotii franate.
Momentul de franare care actioneaza asupra rotii franate poate fi scris sub forma:
Mf = X . rd -- Zr .a (2.6.)
Tinand seama ca valoarea maxima a fortei tangentiale X este limitata de valoarea aderentei, Xmax = φ . Zr , se poate obtine expresia momentului de franare maxim, Mf max, la limita aderentei:
Mf max = Zr. rd . (φ-f) (2.7.)
![]()
2.2.Ecuatia de miscare a automobilului franat
Pentru
determinarea ecuatiei de miscare a automobilului franat se
analizeaza cazul miscarii decelarate a automobilului pe o
rampa de unghi α, fig.2.1. Forta de inertie FI =
-![]() este orientata, in acest caz, in sensul deplasarii
automobilului. Fortele care se opun inaintarii automobilului sunt:
forta
este orientata, in acest caz, in sensul deplasarii
automobilului. Fortele care se opun inaintarii automobilului sunt:
forta
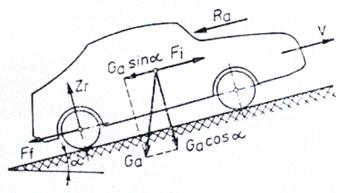
Fig.2.1. Schema automobilului franat pe rampa
de franare Ff , considerata concentrata in axa puntii spate, rezistenta la rulare Rr si componenta greutatii, paralela cu calea de rulare, Ga. sin α. Ecuatia de echilibru a fortelor paralele cu calea de rulare are forma urmatoare:
Fi ― Ff ― Ga . sin α. ― Ra =0 (2.8.)
Daca se tine seama de
expresia fortei de inertie Fi = ![]() .
. ![]() si de relatia 2.5. se obtine:
si de relatia 2.5. se obtine:
![]()
![]() =Ffr +f . Ga .cos + Ga . sin + k .A.V2 (2.9.)
=Ffr +f . Ga .cos + Ga . sin + k .A.V2 (2.9.)
unde Ffr = ![]()
Relatia
2.9. reprezinta ecuatia de miscare a automobilului franat pe
rampa de unghi , iar raportul ![]() = - a se numeste deceleratia
miscarii (a<0)
= - a se numeste deceleratia
miscarii (a<0)
![]()
2.3.Determinarea deceleratiei maxime de franare
Deceleratia maxima de franare se determina din conditia ca la roata franata sa se dezvolte forta de franare maxima, Ffr, care se determina din expresia momentului de franare maxim, dat de relatia 2.7.
Ffr
max = ![]() = Ga . ( -f) . cos (2.10.)
= Ga . ( -f) . cos (2.10.)
Inlocuind in relatia 2.9 se obtine expresia deceleratiei maxime:
 =
Ga . cos -f)+ f . Ga. cos + Ga
. sin + k . A .V2 (2.11.)
=
Ga . cos -f)+ f . Ga. cos + Ga
. sin + k . A .V2 (2.11.)
Daca franarea se face la limita aderentei, pe o cale de rulare orizontala, ( = 0), rezistenta aerului se poate neglija, rezultand urmatoarea expresie pentru deceleratia maxima:
![]()
![]() (2.12.)
(2.12.)
In cazul franarii cu motorul decuplat, coeficientul de influenta a maselor aflate in miscare de rotatie poate fi aproximat ca fiind ≈1, iar deceleratia maxima poate fi calculata cu expresia:
![]() . g [m/s2 ] (2.13.
. g [m/s2 ] (2.13.
Uneori deceleratia maxima se exprima in functie de acceleratia gravitationala. Astfel, pentru cazul franarii pe o cale de rulare cu coeficientul de aderenta = 0,7 deceleratia maxima va fi de 0,7 g.
Decelaratia maxima se obtine in cazul franarilor intense, la limita aderentei, fara blocarea rotilor. Daca rotile se blocheaza poate sa apara alunecarea lor pe calea de rulare, fara a mai putea fi controlata miscarea automobilului.
![]()
2.Determinarea spatiului de franare minim
Spatiul de franare minim este un parametru important de apreciere a performantelor de franare ale automobilului si afecteaza direct siguranta in deplasare. El se determina folosind expresiile de calcul cunoscute pentru spatiu, viteza si timp:
![]() = V:
= V: ![]() = - a (2.1)
= - a (2.1)
Semnul minus din fata deceleratiei arata ca miscarea automobilului este incetinita, adica pentru dt > 0 variatia vitezei este negativa (dV<0).
Din cele doua relatii de mai sus rezulta:
![]() (2.15.)
(2.15.)
Inlocuind valoarea deceleratiei maxime a data de relatia 2.12. se obtine:
dSf min = -![]() (2.16.)
(2.16.)
Apreciind ca franarea automobilului se face de la o viteza initiala Vi pana la o viteza finala Vf atunci spatiul de franare minim Sf min se va obtine ca rezultat al rezolvarii ecuatiei:
Sf min = - = -
= -![]() (2.17.)
(2.17.)
Daca franarea se face pana la oprire, cu motorul decuplat ( ≈1), atunci viteza finala va fi nula (Vf = 0), iar spatiul de franare minim se va calcula cu relatia:
Sf min = ![]() (2.18.)
(2.18.)
Se constata ca marimea spatiului de franare minim este proportionala cu patratul vitezei initiale. Daca viteza initiala creste cu 22,5 % spatiul minim de franare creste cu 50%. Si coeficientul de aderenta influenteaza apreciabil valoarea spatiului de franare minim. Astfel, pe o cale de rulare orizontala, scaderea coeficientului de aderenta cu 66 % conduce la cresterea spatiului de franare minim cu 50 %.
![]()
2.5.Determinarea timpului de franare minim
Timpul de franare minim este timpul masurat din momentul in care conducatorul automobilului sesizeaza necesitatea de franare si pana la oprirea automobilului. Pentru calculul timpului de franare minim se porneste de la relatia:
![]() = - a (2.19.)
= - a (2.19.)
Inlocuind expresia deceleratiei maxime data in 2.12. se obtine:
dtf min = -![]() (2.20.)
(2.20.)
Integrand ecuatia intre limitele Vi (viteza initiala) si Vf (viteza finala) rezulta:
tf
min = - ![]() =
= ![]() (2.21.)
(2.21.)
![]()
Daca franarea se face cu motorul decuplat (δ≈1), pana la oprirea automobilului, atunci Vf =0, iar timpul de franare minim va fi:
tf
min = ![]() (2.22.)
(2.22.)
Timpul de franare minim, determinat in conditiile de mai sus, a fost calculat in ipoteza ca franele intra in functiune imediat ce conducatorul a actionat asupra pedalei de frana si ca momentul de franare Mf are valoarea maxima inca de la inceput. In realitate timpul de franare real este mai mare, deoarece el este influentat de reflexele si experienta conducatorului automobilului si de calitatile tehnice ale sistemului de franare al automobilului.
![]() 2.6. Franarea pe drum orizontal la mersul rectiliniu
2.6. Franarea pe drum orizontal la mersul rectiliniu
Studiul franarii a format si formeaza obiectul multor cercetari, fenomenul de franare depinzand de numeroase variabile, care sunt influentate fie de constructia automobilului si de calitatile sistemului de franare cu care acesta este echipat, fie de aptitudinile conducatorului automobilului. In figura 2.2. este prezentat cazul unui automobil franat pe o cale orizontala, neglijandu-se influenta asupra franarii a rezistentei aerodinamice, a rezistentei la rulare si a eventualelor influente ale caii de rulare.
![]() Va Fi
Va Fi


![]()
![]()
![]() Ga hg
Ga hg
![]()
![]()
![]()
![]() Ff1 Ff2
Ff1 Ff2
![]()
![]()
![]()
![]()
![]() A a b B
A a b B
Z1 L Z2
![]()
Fig.2.2.Schema automobilului franat pe drum orizontal
Scriind ecuatiile de echilibrul de forte in plan orizontal si in plan vertical, respectiv ecuatiile de momente in punctele A si B rezulta:
∑![]()
![]() (2.23.)
(2.23.)
∑ Fz =0
![]()
![]()
![]() (2.2)
(2.2)
![]()
![]()
Din relatiile
de mai sus reactiunile normale ![]() vor fi :
vor fi :
 (2.25.)
(2.25.)
 (2.26.)
(2.26.)
Pentru
aprecierea cantitativa a calitatilor de franare se
foloseste decerelatia
relativa ![]() (coeficientul de franare), definita ca raportul
dintre deceleratia absoluta si acceleratia
gravitationala :
(coeficientul de franare), definita ca raportul
dintre deceleratia absoluta si acceleratia
gravitationala :
 (2.27.)
(2.27.)
Cu aceasta conventie relatiile 2.25. si 2.26. devin :
![]()
![]() (2.28.)
(2.28.)
Notand rapoartele : ![]() si
si ![]() relatiile devin :
relatiile devin :
 (2.29.)
(2.29.)
Tinand seama ca
forta de franare la roata este limitata de marimea
aderentei dintre pneu si calea de rulare , adica ![]() , rezulta :
, rezulta :
 (2.30.)
(2.30.)
Daca definim forta
specifica de franare la roata ![]() ca raportul dintre forta de franare la
roata si greutatea totala a automobilului, atunci vom putea
scrie:
ca raportul dintre forta de franare la
roata si greutatea totala a automobilului, atunci vom putea
scrie:
![]() (2.31.)
(2.31.)
![]()
Relatiile de mai sus exprima marimea fortelor de franare specifice la rotile fata, respectiv spate.
In
conditii optime de franare se poate aprecia ca ![]() , relatiile putand fi scrise sub forma urmatoare,
tinand seama ca in acest caz
, relatiile putand fi scrise sub forma urmatoare,
tinand seama ca in acest caz ![]() :
:
![]() (2.32.)
(2.32.)
Eliminand coeficientul de
aderenta ![]() se obtine ecuatia de gradul al
doilea de forma:
se obtine ecuatia de gradul al
doilea de forma:
![]() (2.33.)
(2.33.)
Prin rezolvarea acestei ecuatii si retinerea solutiei pozitive se obtine :
 (2.3)
(2.3)
Relatia 2.3 exprima legatura dintre fortele specifice de franare la rotile fata si spate in conditii ideale de franare.
Pentru o situatie bine
determinata cand se cunosc ![]() reprezentand grafic, in ordonata fiind
reprezentand grafic, in ordonata fiind ![]() si in abscisa
si in abscisa ![]() ,relatia 2.3 se reprezinta sub forma
unei parabole care, trecand prin origine, intersecteaza axele in
punctele
,relatia 2.3 se reprezinta sub forma
unei parabole care, trecand prin origine, intersecteaza axele in
punctele ![]() si
si ![]() ),
conform fig. 2.3.
),
conform fig. 2.3.
Curba respectiva mai este cunoscuta si sub denumirea de "parabola distributiei ideale a fortei de franare", deoarece defineste marimea fortelor specifice de franare maxime la rotile fata - spate, dezvoltate simultan la limita de aderenta, cand se obtine deceleratia maxima posibila sau deceleratia maxima ideala.
Fiecarui punct al parabolei ii corespunde un anumit coeficient de aderenta, care se poate preciza ducand in acest punct o paralela la bisectoarea a doua a axelor si citind valoarea corespunzatoare la intersectia cu una din axele de coordonate.
![]() F2
F2
![]()
 II
II
![]() i
i
A
![]()
 I
I
P1 P2 PI2
![]() O F1
O F1
![]()
![]()
![]() I (
I (![]()
i
![]()
II
(![]()
Fig.2.3. Parabola distributiei ideale a fortei de franare
Raportul fortelor de franare la punti trebuie sa fie variabil pentru a se realiza franarea optima. Pentru un sistem clasic de franare conditia de franare optima nu este indeplinita decat pentru un singur coeficient de aderenta, rezultat al faptului ca fortele de franare trebuie sa se repartizeze proportional cu sarcinile dinamice la punti, care depind de valoarea deceleratiei.
Se stie ca ![]() , iar forta de inertie
, iar forta de inertie ![]() se calculeaza cu relatia :
se calculeaza cu relatia :
![]() (2.35.)
(2.35.)
Se poate scrie deci :
![]() (2.36.)
(2.36.)
Tinand seama de relatiile 2.30. si 2.31., in conditiile optime de franare, relatia 2.36. devine :
![]() (2.37.)
(2.37.)
Inlocuind relatia 2.37. in relatiile 2.31. vom obtine :
![]()
![]() (2.38.)
(2.38.)
![]() (2.39.)
(2.39.)
Reprezentarea grafica a
relatiilor precedente se face sub forma a doua linii de
aderenta, anterioara ![]() si posterioara
si posterioara ![]() Prima, pentru diferite valori
ale lui
Prima, pentru diferite valori
ale lui ![]() ,
determina un fascicul de drepte trecand prin punctul(
,
determina un fascicul de drepte trecand prin punctul(![]() ), iar a
doua, pentru diferite valori ale lui
), iar a
doua, pentru diferite valori ale lui ![]() determina un fascicul de drepte trecand
prin punctul (
determina un fascicul de drepte trecand
prin punctul (![]() ) . Pentru
un automobil cu o anumita sarcina, care se deplaseaza pe o
anumita cale, marimile
) . Pentru
un automobil cu o anumita sarcina, care se deplaseaza pe o
anumita cale, marimile ![]() si
si ![]() sunt cunoscute si constante, in timp
ce
sunt cunoscute si constante, in timp
ce ![]() si
si ![]() sunt marimi variabile dependente de
forta la pedala de frana.
sunt marimi variabile dependente de
forta la pedala de frana.
Este cunoscut faptul ca o
dreapta imparte planul in doua regiuni, una pozitiva si una
negativa. Daca se considera dreapta de ecuatie ![]() , atunci una din regiuni este acea
portiune a planului, dintr-o parte a dreptei, pentru care
, atunci una din regiuni este acea
portiune a planului, dintr-o parte a dreptei, pentru care ![]() ,
iar a doua regiune o formeaza cealalta portiune a planului,
pentru care
,
iar a doua regiune o formeaza cealalta portiune a planului,
pentru care ![]()
![]()
F2
![]()
![]()
![]()
![]()
![]()
![]()
![]() D1
D1
IV
II
III
I D2
![]()
F1
Fig.2. Dreptele de echiaderenta
Reprezentand
grafic dreptele ![]() ,
, ![]() , ale caror ecuatii sunt date in relatia 2.38.
, respectiv 2.39.,, se poate arata ca un punct din planul
, ale caror ecuatii sunt date in relatia 2.38.
, respectiv 2.39.,, se poate arata ca un punct din planul ![]() se poate gasi in
unul din urmatoarele domenii ale planului :
se poate gasi in
unul din urmatoarele domenii ale planului :
-domeniul I (![]() >0,
>0, ![]() >0);
>0);
-domeniul
II (![]() >0,
>0, ![]() <0);
<0);
-domeniul
III (![]() <0,
<0, ![]() >0);
>0);
-domeniul
IV (![]() <0,
<0, ![]() <0).
<0).
Acestor domenii, fig. 2., le corespund urmatoarele situatii pentru rotile automobilului :
I - rotile din fata si din spate ruleaza fara tendinte de blocare, deci au alunecari relative in zonele de stabilitate;
II - rotile din fata ruleaza fara blocare, iar cele din spate se blocheaza;
III - rotile din fata se blocheaza, iar cele din spate ruleaza fara blocare;
IV - rotile de la ambele punti se blocheaza.
![]()
Cum se defineste caracteristica fortei la roata ?
Cum se defineste caracteristica dinamica? Dar factorul dinamic?
Cum se defineste caracteristica acceleratiilor ?
Ce parametrii pot fi determinati cu ajutorul caracteristicii dinamice?
Cum definiti timpul de demaraj? Dar spatiul de demaraj?
6. Ati inteles cum este generata si cum actioneaza forta de franare la roata? Daca raspunsul este 'da', cum se intampla acest lucru?
7.Ati retinut expresia de calcul a deceleratiei maxime? Daca raspunsul este 'da', incercati sa o scrieti ?
8.Daca ati auzit de parabola ideala de franare puteti spune ce reprezinta aceasta ?
9.Poate fi momentul de franare la roata oricat de mare?
10.De ce nu se calculeaza timpul si spatiul de demarare pana la viteza maxima?
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |