
DEFORMAREA ELASTICA A STRUCTURILOR
1 Introducere
Obiectul Staticii constructiilor consta in determinarea eforturilor si deplasarilor structurilor alcatuite din bare. Cunoasterea eforturilor este necesara ca pe baza lor se face dimensionarea structurii. Desi nu apare intotdeauna la fel de evidenta cunoasterea deplasarilor este la fel de importanta deoarece buna functionare a unei constructii cere ca deplasarile sa nu depaseasca anumite valori limita admise de normative. Pe de alta parte in Statica constructiilor studiul deformarii structurilor reprezinta mijlocul de rezolvare a structurilor static nedeterminate. Numai considerind echilibrul in pozitia deformata se pot obtine ecuatiile suplimentare necesare calculului eforturilor in aceasta categorie de structuri.
Starea de echilibru a unei structuri stabilita in pozitia deformata, se caracterizeaza prin indeplinirea a doua conditii:
-conditia de echilibru static, care exprima faptul ca fortele exterioare si interioare de pe structura se gasesc in echilibru;
-conditia de continuitate, care exprima faptul ca pozitia deformata respecta legaturile structurii, precum si continuitatea materialului din care ea este alcatuita.
Aceste conditii permit rezolvarea oricarei structuri, static determinata sau static nedeterminata. In cazul structurilor static determinate scrierea ecuatiilor de echilibru static este suficienta pentru determinarea reactiunilor si eforturilor. La structurile static nedeterminate insa, numarul necunoscutelor este mai mare decit numarul ecuatiilor de echilibru static si de aceea, intotdeauna, trebuie folosite ambele conditii.
Exprimarea echilibrului in pozitia deformata se poate realiza in doua moduri:
-aplicarea principiului lucrului mecanic virtual
-utilizarea legii conservarii energiei
2 Lucrul mecanic al fortelor exterioare
Prin deformarea structurii punctele de aplicatie ale fortelor isi schimba pozitia si ca urmare, fortelor exterioare produc lucru mecanic, denumit pe scurt lucru mecanic exterior.
Daca forta se deplaseaza in sensul sau de actiune, lucrul mecanic va fi considerat pozitiv. Daca forta se deplaseaza in sens invers sensului sau de actiune, lucrul mecanic este denumit rezistent si va fi considerat negativ.
In cazul corpurilor deformabile sint posibile doua situatii in care fortele exterioare produc lucru mecanic.
-forta efectueaza lucru mecanic parcurgind deplasarea produsa de ea insasi prin deformarea structurii asupra careia actioneaza;
-forta efectueaza lucru mecanic parcurgind deplasarea, pe directia sa, dar produsa de o alta forta, ce actioneaza asupra structurii.
Analiza acestor doua situatii va permite evidentierea diferentei dintre ele.
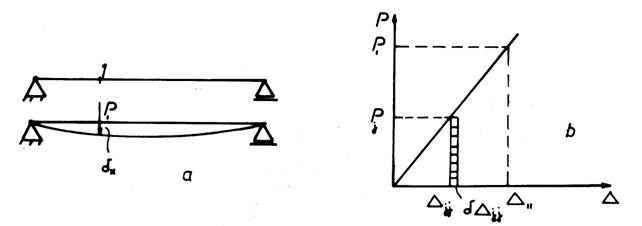
Fig.1 Lucrul mecanic produs de o forta parcurgind deplasarea produsa de ea insasi
Fie grinda simplu rezemata din fig. 1a ce se incarca cu o forta concentrata aplicata static. Pe masura ce intensitatea fortei creste de la valoarea zero la valoarea finala P1, punctul sau de aplicatie se deplaseaza cu Δ11.
Pentru a determina lucrul mecanic efectuat de forta P1 se porneste de la variatia lucrului mecanic.
![]()
care reprezintǎ suprafata elementarǎ de formǎ dreptunghiularǎ, hasurat in fig.1b.
Lucrul mecanic al fortei P1va fi
![]()
Observind
cǎ ![]() rezultǎ:
rezultǎ:
![]()
ceea ce aratǎ cǎ lucrul mecanic efectuat de forta P1 este egal cu jumǎtate din produsul dintre fortǎ si deplasarea pe directia fortei .
Fie grinda din figura 2 care prin incǎrcare cu forta P1 a ajuns in pozitia deformatǎ. Dacǎ in aceastǎ situatie se aplicǎ o nouǎ fortǎ P2, (fig.3) grinda se deformeazǎ in continuare, iar punctul de aplicatie al fortei P1 se deplaseazǎ cu Δ12.Forta P1 va parcurge aceastǎ deplasare cu intreaga sa intensitate, deci lucrul mecanic va fi:
![]()
Trebuie retinutǎ diferenta principalǎ dintre cele douǎ situatii de producere a lucrului mecanic de cǎtre o fortǎ ce actioneazǎ asupra unui corp deformabil.
Suprafata cuprinsǎ intre dreapta 0-1 si axa 0-P este denumitǎ lucru mecanic complementar. In cazul corpurilor la care relatia fortǎ-deplasare este liniarǎ lucrul mecanic complementar este egal cu lucrul mecanic exterior.
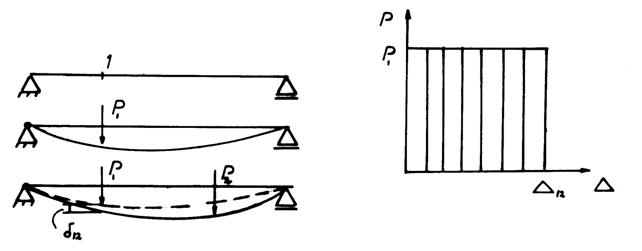
Fig.3 Lucrul mecanic produs de forta P1 parcurgind deplasarea produsa de forta P2
Deplasǎrile au fost notate cu doi indici, primul aratǎ directia fortei pe care are loc deplasarea, iar al doilea forta care a produs deplasarea.
Cind asupra corpului elastic
se aplicǎ simultan mai multe forte, expresia (3) a lucrului mecanic
exterior capǎtǎ forma:![]()
In situatia a doua de incǎrcare, cind pe corpul elastic existǎ sistemul de forte Pi si ulterior se aplicǎ sistemul de forte Pj lucrul mecanic exterior are expresia:
![]()
4 Lucrul mecanic al fortelor interioare. Lucrul mecanic al eforturilor.
Lucrul mecanic al eforturilor are loc ca urmare a faptului cǎ se produce deformarea corpului elastic. Se obisnuieste sǎ se utilizeze si denumirea de energie de deformatie acumulatǎ de corp, care se noteazǎ cu litera W. Deci:
![]()
Din
Rezistenta Materialelor se
stie cǎ energia de deformatie pentru un volum elementar ![]() ,este:
,este:
![]() , in cazul solicitarii cubului elementar cu eforturile
unitare normale
, in cazul solicitarii cubului elementar cu eforturile
unitare normale![]()
In
cazul solicitarii cu eforturi unitare tangentiale ![]() atunci
atunci ![]()
iar energia de deformatie pentru intregul corp este:
![]() ,respectiv
,respectiv ![]()
Energia de deformatie pentru solicitǎri simple este:
Solicitare axialǎ Deoarece N= A si σ=Eε rezultǎ:
![]()
Incovoiere
. In acest
caz ![]() deci
deci
![]()
deoarece
![]()
Lunecare
Tinind
seama cǎ ![]() , se obtine:
, se obtine:
 unde s-a notat cu
unde s-a notat cu ![]() reprezentind un coeficient ce depinde de forma sectiunii
transversale.
reprezentind un coeficient ce depinde de forma sectiunii
transversale.
In cazul solicitǎrii compuse energia de deformatie acumulatǎ de barǎ este:
![]()
Pentru structuri formate din mai multe bare, integralele (12) se extind asupra tuturor barelor.
In cele ce urmeazǎ se va determina expresia lucrului mecanic al eforturilor.
a. Solicitarea axialǎ
![]()
![]()
b. Incovoiere
![]()
deoarece ![]()
c.Lunecare
![]()
Pentru solicitarea compusǎ lucrul mecanic al eforturilor are expresia:
![]()
Se constatǎ cǎ:
Lef=W
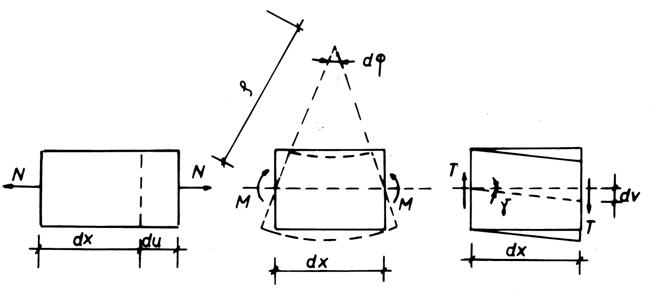
Fig.4 Prezentarea deplasarilor generalizate pentru un element de bara de lungime dx
5 Lucrul mecanic total
Rezultatele stabilite in paragrafele precedente permit sǎ se evalueze lucrul mecanic total produs, in cursul deformǎrii barei sau structurii, atit de fortele exterioare cit si de eforturi:
![]()
In cazul in care fortele aplicate static si eforturile corespunzǎtoare parcurg deplasǎrile si deformatiile produse de ele insile, lucrul mecanic total are forma:
![]()
In cazul in care fortele si eforturile din situatia de incǎrcare i parcurg deplasǎrile si deformatiile produse de situatia de incǎrcare j, lucrul mecanic total are expresia:
![]()
6 Teorema lui Clapeyron
Prin ipotezele simplificatoare ale calculului de ordinul I s-a admis cǎ energia de deformatie acumulatǎ de structurǎ prin trecere in pozitie deformatǎ este integral consumatǎ pentru aducerea structurii in pozitia initialǎ, la indepǎrtarea incǎrcǎrilor care au produs deformatia. Structurile de rezistentǎ care satisfac aceastǎ conditie se numesc sisteme conservative.
De asemenea, s-a admis cǎ fortele se aplicǎ static, respectiv energia cineticǎ a sistemului in cursul deformǎrii este egalǎ cu zero. Teorema energiei exprimǎ faptul cǎ variatia energiei cinetice intr-un interval de timp este egalǎ cu variatia lucrului mecanic, deci:
![]()
iar dacǎ intervalul de timp este reprezentat de momentele 1 si 2 rezultǎ:
![]()
Considerind cǎ momentele 1 si 2 reprezintǎ inceputul si finalul deformǎrii structurii rezultǎ cǎ:
![]()
Deoarece energia cineticǎ este egalǎ cu zero, din (21) rezultǎ:
![]()
ceea ce inseamnǎ cǎ relatia 22 exprimǎ faptul cǎ in cazul sistemelor conservative, aflate in echilibru, lucrul mecanic total este egal cu zero.
Relatia de mai sus se poate scrie sub una din formele:
![]()
Ea reprezintǎ teorema lui Clapeyron, teoremǎ care se enuntǎ astfel: "pentru un sistem conservativ, aflat in echilibru sub actiunea unui sistem de forte, lucrul mecanic produs de fortelor exterioare este egal cu energia potentiala de deformatie acumulatǎ in sistem".
7 Teoremele lui Castigliano
Teoremele lui Castigliano se obtin din cele douǎ variante ale principiului lucrului mecanic virtual.
Prima teoremǎ. Se considerǎ corpul din Fig. 6a cǎruia i se aplicǎ deplasarea virtualǎ reprezentatǎ in fig.6b
Fig.6 Corp oarecare caruia i se aplica o deplasare virtuala
Lucrul mecanic virtual efectuat de fortele exterioare este:
![]()
Dar
![]() .Considerind variatia energiei de deformatie in
raport cu fiecare deplasare se obtine:
.Considerind variatia energiei de deformatie in
raport cu fiecare deplasare se obtine:
![]()
Din relatia de mai sus rezultǎ cǎ "derivata partialǎ a energiei de deformatie in raport cu deplasarea pe directia unei forte este egalǎ cu valoarea acestei forte " ceea ce reprezintǎ prima teoremǎ a lui Castigliano.
A doua
teoremǎ.
Se considerǎ acum cǎ, in situatia de echilibru a aceluiasi
corp, se dǎ o variatie δPi fortelor exterioare. Lucrul mecanic virtual are forma:![]()
Conform principiului fortelor virtuale δL*=δW*
Considerind variatia energiei de deformatie in raport cu fiecare variatie a fortelor se obtine:
![]()
Din (29) rezultǎ cǎ "derivata partialǎ a energiei de deformatie in raport cu o fortǎ este egalǎ cu deplasarea pe directia acestei forte" ceea ce reprezintǎ a doua teoremǎ a lui Castigliano".
8 Teorema generala a reciprocitatii si formele sale particulare
1 Teorema reciprocitatii lucrului mecanic (teorema Betti)
Utilizarea in paralel a doua situatii diferite de incarcare pentru o structura, permite sa se stabileasca o teorema generala a echilibrului elastic.
Fie
doua situatii de incarcare (fig.7), anume prima
caracterizata prin fortele exterioare Pi si
eforturile M,N, iar a doua prin fortele exterioare ![]() si eforturile
si eforturile ![]() .
.
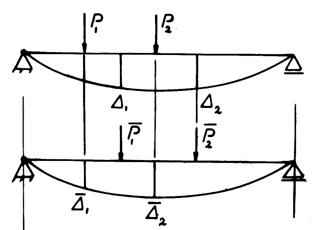
Fig.7 Grinda dreapta simplu rezemata in doua situatii de incarcare
Folosind principiul deplasarilor virtuale (sau legea conservarii energiei) sau stabilit relatiile:
![]() si
si ![]()
Pentru
cazul deformarii elastice, deplasarile relative ![]() si respectiv
si respectiv ![]() au expresiile:
au expresiile:
![]()
![]()
![]()
![]()




Introducindu-le in cele doua relatii generale, se constata ca pentru ambele membrul al doilea rezulta cu aceeasi expresie, anume

ceea ce inseamna ca si primii membrii trebuie sa fie egali. Se obtine relatia
![]()
care exprima teorema generala a reciprocitatii, stabilita de Betti in 1872 si care se enunta astfel: Pentru o structura considerata in doua situatii diferite de incarcare, lucrul mecanic dat de fortele exterioare din prima situatie parcurgind deplasarile care le corespund in pozitia deformata produsa de a doua situatie, este egal cu lucrul mecanic dat de fortele exterioare din a doua situatie parcurgind deplasarile care le corespund in pozitia deformata data de prima situatie..
De retinut ca in aceasta teorema, denumita si teorema reciprocitatii lucrului mecanic, care pune in reciprocitate cele doua situatii de incarcare, intervine numai lucrul mecanic al fortelor exterioare. Asa cum s-a aratat anterior, una dintre situatii va fi desigur cea reala corespunzatoare problemei care se studiaza; cealalta se alege in mod arbitrar, adaptind-o obtinerii unor rezultate simple si expresive
2 Reciprocitatea deplasarilor unitare
Se aplica relatia 30 si rezulta:
![]()
Daca se considera Pi=Pj=1
si se noteaza cu ![]() deplasarile produse de forte, se obtine:
deplasarile produse de forte, se obtine:
![]()
sau
![]()
Relatia 32 arata ca deplasarea din sectiunea i, dupa directia fortei din i, produsa de o forta egala cu unitatea aplicata in j , este egala cu deplasarea din sectiunea j, dupa directia fortei din j, produsa de o forta egala cu unitatea aplicata in i. (fig.8)
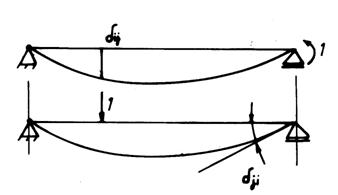
Fig.8 Exemplu reciprocitate deplasari unitare
Reciprocitatea deplasarilor unitare se utilizeaza la rezolvarea structurilor static nedeterminate prin metoda fortelor.
3 Reciprocitatea reactiunilor unitare
In acest caz structura se incarca numai cu deplasari. In cazul structurilor static determinate, datorita numarului minim de legaturi pe care aceste structuri le au pentru asigurarea invariabilitatii geometrice si fixarii fata de teren, deplasarile pe directiile unor legaturi provoaca numai modificarea configuratiei structurii nu si deformarea ei. Ca atare, in structura nu apar reactiuni si eforturi. De aceea, reciprocitatea reactiunilor unitare este specifica structurilor static nedeterminate.
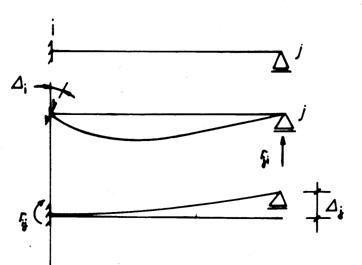
Fig.9 Exemplu reciprocitate reactiuni unitare
Se
incarca structura cu o deplasare ![]() , dupa directia legaturii i, iar apoi cu o
deplasare
, dupa directia legaturii i, iar apoi cu o
deplasare ![]() , dupa directia legaturii j (fig.9).
, dupa directia legaturii j (fig.9).
Daca se evidentiaza distinct actiunile si reactiunile se poate scrie:
![]()
Daca se aplica relatia 33, rezulta:
![]()
Consideram
ca deplasarile impuse sint egale cu unitatea, adica ![]() , si notam cu r reactiunile produse ca urmare
a incarcarii cu acste deplasari. In acest caz se obtine:
, si notam cu r reactiunile produse ca urmare
a incarcarii cu acste deplasari. In acest caz se obtine:
![]() sau
sau ![]()
Relatia (35) arata ca: reactiunea din legatura I , datorita incarcarii cu o deplasare egala cu unitatea dupa directia legaturii j, este egala cu reactiunea din legatura j, datorita incarcarii cu o deplasare egala cu unitatea dupa directia legaturii i.
Reciprocitatea reactiunilor unitare se utilizeaza la rezolvarea structurilor prin metoda deplasarilor.
4 Calculul deplasǎrilor punctuale ale structurilor elastice. Relatia Maxwell-Mohr
Se considera o structura cu doua
situatii de incarcare: situatia "i" cu sistemul de forte
"Pi" si eforturile aferente Ni, Ti, Mi si situatia "j" cu sistemul de
forte "![]() si cu eforturile
si cu eforturile ![]() .
.
Din relatia (18) in care se prezinta expresia lucrului mecanic total in cazul in care fortele si eforturile din situatia de incǎrcare i parcurg deplasǎrile si deformatiile produse de situatia de incǎrcare j, aceasta expresie devine:
![]()
-![]() reprezinta deplasarea in sectiunea i produsa
de fortele aplicate in j.
reprezinta deplasarea in sectiunea i produsa
de fortele aplicate in j.
Expresia (36) se poate utiliza in calculul deplasǎrilor sectiunilor -translatii sau rotiri- dacǎ se face urmǎtoarea particularizare:
-se presupune cǎ sistemul de forte i este format dintr-o singurǎ fortǎ si aceea egalǎ cu unitatea, PI=1
-forta Pi=1 actioneazǎ pe directia deplasǎrii cǎutate;
-sub actiunea fortei Pi=1 in structurǎ apar eforturile ni, ti, si mi. Aceste eforturi se numesc eforturi unitare, in sensul cǎ sint produse de o fortǎ egalǎ cu unitatea;
-sistemul de forte Pj reprezintǎ fortele reale ce actioneazǎ asupra structurii.
In aceastǎ situatie relatia (36) devine:
![]()
ceea ce constituie relatia Maxwell-Mohr pentru calculul deplasǎrilor sectiunilor structurilor static determinate si static nedeterminate supuse actiunii fortelor.
Deoarece sistemul de forte Pj este tocmai sistemul real de forte pentru care se doreste calculul deplasǎrii unei sectiuni, in practicǎ se renuntǎ la indicele j astfel incit expresia deplasǎrii se mai poate scrie:
![]()
Deplasarea Δi este o deplasare generalizatǎ, in sensul cǎ ea poate fi translatia unei sectiuni dupǎ o directie oarecare, rotirea unei sectiuni (rotirea absolutǎ), deplasarea relativǎ a douǎ sectiuni.
Termenii din dreapta ai relatiei Maxwell-Mohr au pondere diferitǎ in calculul deplasǎrilor elastice la diferitele tipuri de elemente sau structuri de rezistentǎ. Astfel:
-la elementele si structurile de rezistentǎ la care efectul incovoierii este predominant (grinzi simple, grinzi Gerber, cadre)deplasarea se calculeazǎ cu relatia:
![]()
-la grinzile cu zǎbrele, in barele cǎrora apar numai eforturi axiale, deplasarea se calculeazǎ cu relatia:
![]()
-in cazul arcelor, la care efectul predominant este compresiunea excentricǎ (incovoiere cu fortǎ axialǎ), deplasarea se calculeazǎ cu relatia:
![]()
In cele ce urmeazǎ se prezintǎ cazurile tip pentru incǎrcarea unitarǎ, necesarǎ calculului deplasǎrilor elastice:
-grinzi simple:
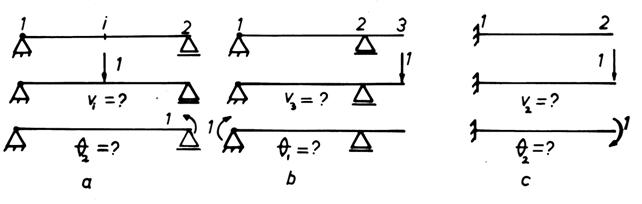
Fig.10 Grinzi simple
-grinzi Gerber:
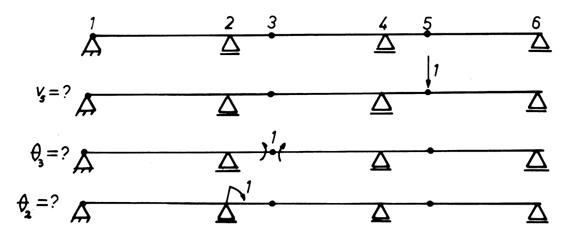
Fig.11 Grinzi Gerber
-cadre static determinate
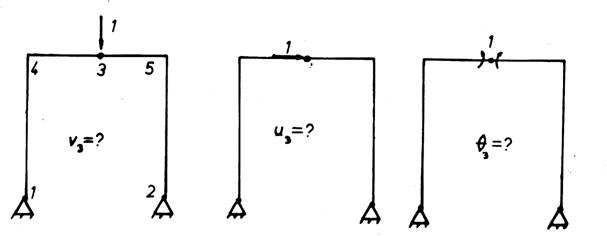
Fig.12 Cadre static determinate
-grinzi cu zǎbrele
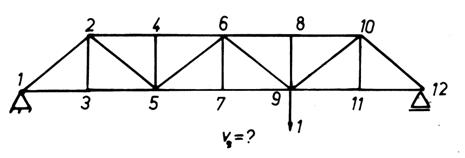
Fig.13 Grinzi cu zabrele
In cazul arcelor incǎrcarea unitarǎ se aplicǎ la fel ca la cadre. Incǎrcarea unitarǎ pentru calculul unei deplasǎri este aceeasi indiferent de incǎrcarea realǎ ce se aplicǎ structurii.
9 Regula de integrare Veresceaghin
Calculul deplasǎrilor sectiunilor prin rezolvarea directǎ a integralelor din expresia Maxwell-Mohr este greoi, in special pentru calculul efectului momentelor incovoietoare.
Pentru elementele si structurile de rezistentǎ formate din bare avind aria si momentul de inertie al sectiunii transversale constante s-a putut da o regulǎ practicǎ de rezolvare a integralelor, denumitǎ regula lui Veresceaghin.
La stabilirea acestei reguli s-a pornit de la constatarea cǎ diagramele de moment incovoietor obtinut din incǎrcarea cu forta unitate, PI=1 au totdeauna variatie liniarǎ in lungul barelor drepte, deoarece aceastǎ incǎrcare este incǎrcare concentratǎ. In schimb, diagrama de moment incovoietor M, produsǎ de fortele reale poate prezenta zone cu variatie liniarǎ cit si zone cu variatie neliniarǎ (curbe de gradul II sau III).
Fie un tronson dintr-o barǎ, avind modulul de elasticitate E si momentul de inertie I0 pe care diagrama M are o variatie curbilinie oarecare si diagrama mI are o varatie liniarǎ. Se urmǎreste sǎ se calculeze integrala urmǎtoare:
![]()
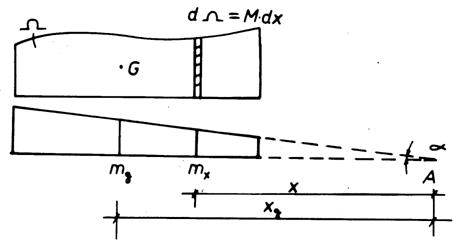
Fig.14 Regula de integrare Veresceaghin
Pentru aceasta se noteazǎ suprafata
elementarǎ din diagrama M cu dΩ=Mdx, iar ordonata
corespunzǎtoare din diagrama unitarǎ cu ![]() . Cu aceste elemente se obtine:
. Cu aceste elemente se obtine:
![]()
Deoarece
![]() reprezintǎ
momentul static al suprafetei diagramei M in raport cu o axǎ ce trece
prin punctul A rezultǎ:
reprezintǎ
momentul static al suprafetei diagramei M in raport cu o axǎ ce trece
prin punctul A rezultǎ:
![]()
Observind
cǎ ![]() se obtine expresia cǎutatǎ:
se obtine expresia cǎutatǎ:
![]()
care se interpreteazǎ astfel: "rezultatul integrǎrii a douǎ diagrame, dintre care cel putin una cu variatie liniarǎ, este egal cu produsul dintre suprafata diagramei cu variatie neliniarǎ si ordonata corespunzǎtoare centrului sǎu de greutate, luatǎ din diagrama cu variatie liniarǎ, impǎrtit la EI."
De fapt diagramele compuse se pot descompune in diagrame simple, asa cum se exemplificǎ in cele ce urmeazǎ:
Fig.15 Descompunerea diagramelor compuse in diagrame simple
10 Deplasari elastice
-Grinzi drepte
Exemplul 1: Se considerǎ grinda metalicǎ din figura 16, si se cere sǎ se calculeze deplasarea pe verticalǎ a punctului de aplicatie al fortei: v3 . Se cunosc E=2,1x106 daN/m2, I=15000cm4,l=5m
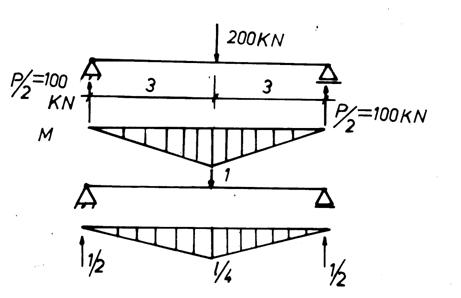
Fig.16 Calculul deplasarii elastice pentru o grinda simpla rezemata incarcata cu o forta concentrata
Se determinǎ reactiunile si se traseazǎ diagrama de momente incovoietoare, M, produse de forta P.
Pentru calculul deplasǎrii v3 se aplicǎ pe grindǎ in punctul 3 o fortǎ verticalǎ egalǎ cu unitatea si se calculeazǎ reactiunile si se traseazǎ diagrama unitarǎ de momente incovoietoare notatǎ mv.
Calculul deplasǎrii prin integrare directǎ
Deplasarea
v3 se calculeazǎ cu relatia: ![]() . Se constatǎ cǎ diagramele M si mv
sint simetrice in raport cu mijlocul deschiderii, deci se va efectua integrarea
pe jumǎtate din deschidere, iar rezultatul se multiplicǎ cu 2.
Momentele incovoietoare M si mv in sectiunea curentǎ,
au expresiile:
. Se constatǎ cǎ diagramele M si mv
sint simetrice in raport cu mijlocul deschiderii, deci se va efectua integrarea
pe jumǎtate din deschidere, iar rezultatul se multiplicǎ cu 2.
Momentele incovoietoare M si mv in sectiunea curentǎ,
au expresiile:
![]()
Cu aceste expresii integrala devine:

Se constatǎ cǎ s-a obtinut acelasi rezultat.
Cu datele numerice propuse se obtine valoarea deplasǎrii (se lucreazǎ in daN si cm):
![]()
Se observǎ cǎ deplasarea este micǎ, in comparatie cu lungimea grinzii.
Deoarece in ambele diagrame M si mv fibra intinsǎ prin incovoiere este aceeasi, semnul integralei este plus. Dacǎ fibra intinsǎ ar fi diferitǎ in cele douǎ diagrame semnul este minus.
Deplasarea v3 a rezultat cu semnul plus. Aceasta inseamnǎ cǎ deplasarea v3 se produce cu sensul de actiune al fortei unitate. Dacǎ semnul ar fi minus, inseamnǎ cǎ deplasarea se producea in sens invers sensului de actiune al fortei unitate.
Exemplul 2: Pentru grinda Gerber din
fig.17 sa se traseze diagramele de forta taietoare si
de moment incovoietor si sa se calculeze deplasarea pe verticala
v3 si deplasarea pe verticala v5, considerind ![]()
Grinda Gerber se imparte in grinda principala si grinda secundara, astfel grinda 1-3 este grinda principala iar grinda 3-5 este grinda secundara.
Calcul reactiuni pentru grinda secundara 3-4:
![]()
![]()
Calcul reactiuni pentru grinda principala 1-2:
![]()
![]()
Relatia
Maxwell Mohr pentru calculul deplasarii v3 are forma:![]()
Deplasarea
v3 se obtine integrind diagrama de momente M cu diagrama ![]()
![]() Deplasarea v5 se obtine integrind diagrama de
momente M cu diagrama
Deplasarea v5 se obtine integrind diagrama de
momente M cu diagrama ![]() :
:
![]()
![]()
![]()
![]()
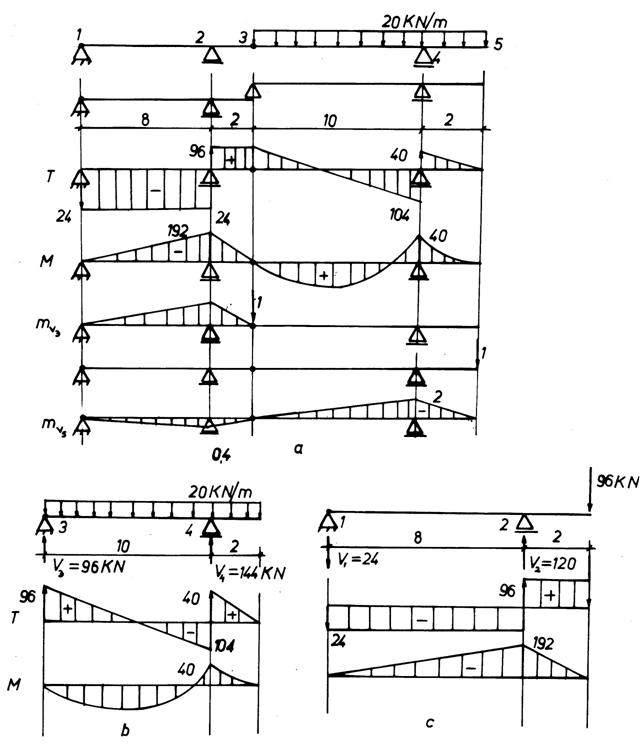
Fig.17 Calculul deplasarii pe verticala v3 si a deplasarii v5;
a)diagrame T,M pentru grinda Gerber,diagrame unitare din incarcarea cu forta unitate pe directia deplasarilor cautate
Exemplul 3: Sa se traseze diagramele de forta taietoare si de moment incovoietor si sa se calculeze deplasarea la grinda Gerber din figura 1
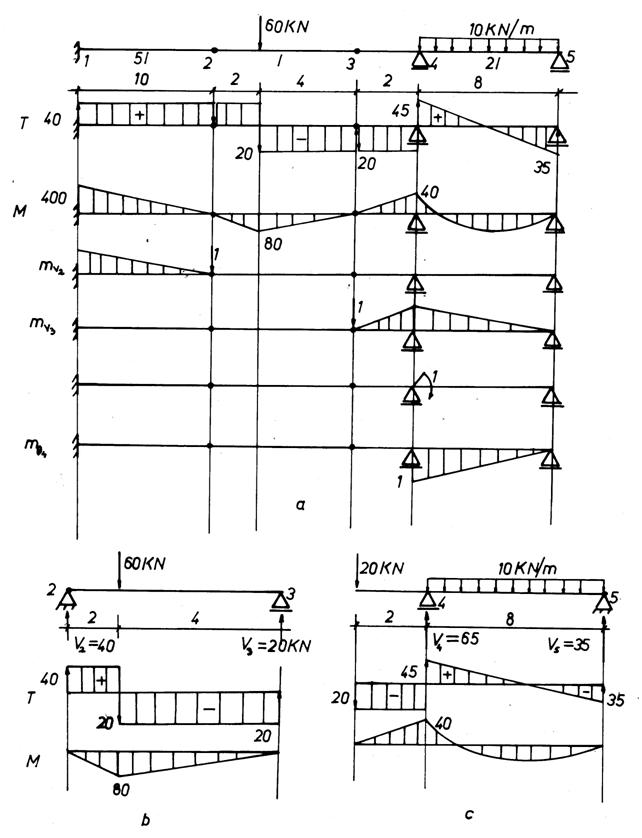
Fig.18 Calculul deplasarii v2, v3 si rotatiei q
a) diagrame de forta taietoare, moment, diagrame unitare de moment din incarcarea cu forta unitara pe directia deplasarii cautate; b,c)rezolvare grinda 2-3 si 4-5
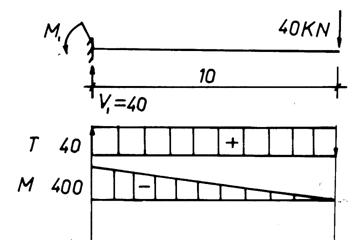
Fig. 19 Diagrame T si M pentru grinda principala 1-2
Calcul reactiuni pentru grinda 2-3:
![]()
![]()
Calcul reactiuni pentru grinda 4-5:
![]()
![]()
Calcul deplasari elastice:
![]()
![]()
![]()
![]()
-Cadre
Exemplul 4
Sa
se calculeze deplasarea ![]() a cadrului static determinat din figura 20 considerind
produsul
a cadrului static determinat din figura 20 considerind
produsul ![]()
Deplasarea
v4 se obtine integrind diagrama de momente M,
obtinuta din incarcarea cu sarcini exterioare, cu diagrama ![]() , obtinuta
din incarcarea cadrului static determinat cu o forta unitate pe
directia deplasarii cautate.
, obtinuta
din incarcarea cadrului static determinat cu o forta unitate pe
directia deplasarii cautate.
Calcul reactiuni din incarcarea cu sarcini exterioare:
![]()
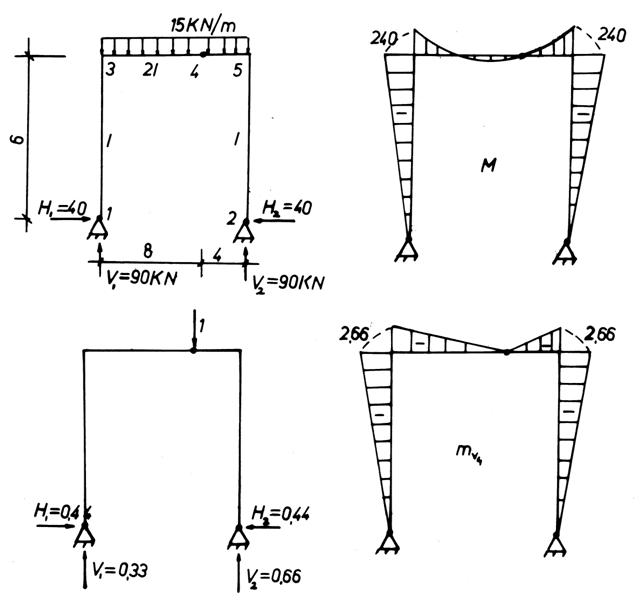
Fig.20 Diagrame de moment din incarcarea cu sarcini exterioare si din incarcarea cu forta unitate pe directia deplasarii cautate
![]()
![]()
![]()
Calcul reactiuni pentru cadrul incarcat cu forta unitate:
![]()
![]()
![]()
Calcul
deplasare ![]() :
:
![]()
![]()
![]()
Exemplul 5
Sa
se calculeze deplasarea relativa in sectiunea 3 a cadrului static
determinat din figura 21, considerind ![]()
![]()
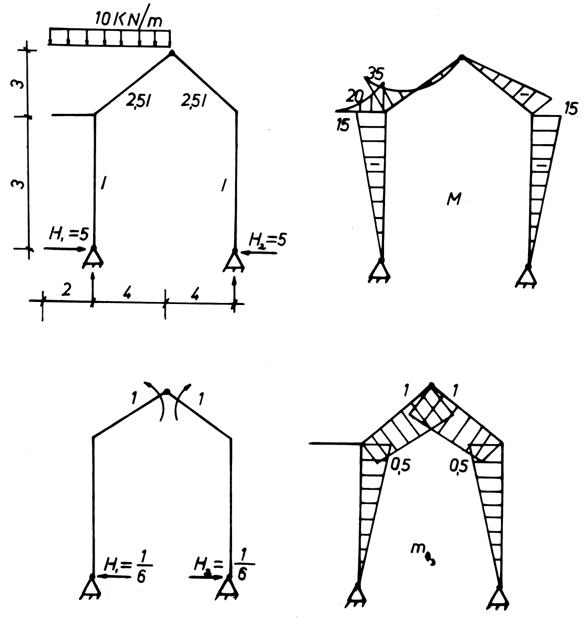
Fig.21 Diagrama de moment din sarcini exterioare si din incarcarea cu o pereche de momente unitare in sectiunea 3
Calcul reactiuni cadru static determinat din incarcarea cu forte exterioare:
![]()
![]()
![]()
![]()
Calcul reactiuni pentru cadrul static determinat incarcat cu perechea de momente unitare:
![]()
![]()
Calcul rotatie relativa a sectiunii 3:
![]()
![]()
![]()
-Cadre simetrice
O structura se considera simetrica in raport cu o axa, daca elementele geometrice: lungimile barelor si caracteristicile geometrice ale sectiunilor transversale A si I, legaturile interioare si cele exterioare (reazemele) sint aceleasi de o parte si de alta a axei considerate. In figura 22 sint prezentate citeva exemple de cadre static determinate simetrice.
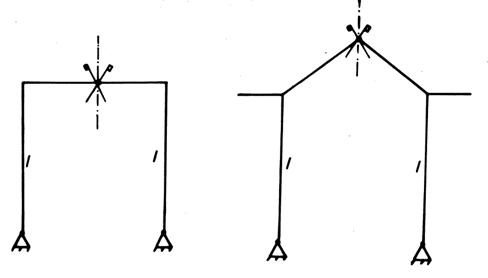
Fig.22 Structuri simetrice
In calculul acestor structuri apar unele particularitati in cazul in care incarcarea este, la rindul ei, simetrica sau antisimetrica. In cazurile reale incarcarile pot fi:
-incarcari oarecare
-incarcari simetrice
-incarcari antisimetrice
Orice incarcare oarecare poate fi decompusa intr-o incarcare simetrica si o incarcare antisimetrica. Se calculeaza structura separat pentru incarcarea simetrica si separat pentru incarcarea antisimetrica, si apoi se suprapun efectele pentru a obtine situatia corespunzatoare incarcarii oarecare. In figura 23 sint prezentate exemple de descompunere a unei incarcari oarecare in incarcare simetrica si incarcare antisimetrica.
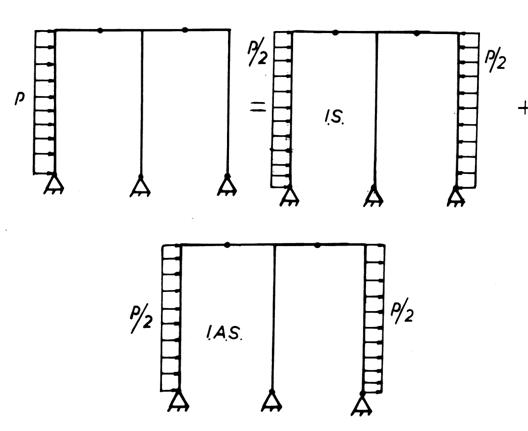
Fig.23 Descompunerea unei incarcari
Particularitatile care vor fi consemnate la cadrele static determinate, referitoare la diagramele de eforturi si forma deformata a structurii, se vor mentiona si la cadrele static nedeterminate.
In calculul acestor structuri, utilizarea proprietatilor de simetrie ale structurii si incarcarii conduce la reducerea sensibila a volumului de calcule.
-Cadre simetrice incarcate simetric
Exemplul 6: Fie cadrul din fig.24
incarcat simetric. Se cere sa se calculeze deplasarile ![]() considerind produsul
considerind produsul ![]() .
.
Calcul reactiuni incarcare forte exterioare:
![]()
![]()
![]()
Diagramele N,T,M sint prezentate in figura 19.
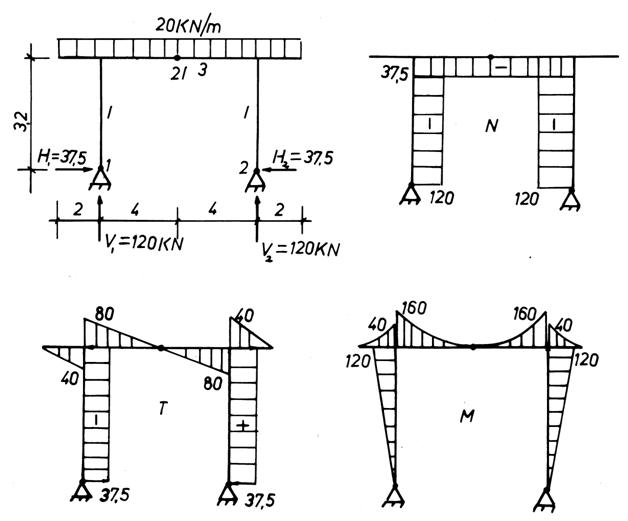
Fig.24 Cadru simetric incarcat simetric
Din rezultatele obtinute se desprinde concluzia generala ca:
"la structurile simetrice, incarcate simetric, reactiunile sint simetrice".
Din analiza diagramelor de eforturi rezulta urmatoarele concluzii: "la structurile simetrice incarcate simetric diagramele de forta axiala si de moment incovoietor sint simetrice, iar diagrama de forta taietoare este antisimetrica".
Calculul deplasarii pe verticala v3
Incarcarea unitara pentru calculul deplasarii v3 este o incarcare simetrica si in consecinta si diagrama unitara de moment incovoietor, mv, este simetrica. De aceea in calculul deplasarii se integreaza diagramele numai pe jumatate de structura, iar fiecare termen se multiplica cu 2.
Calcul reactiuni din incarcarea cu forta unitate:
![]()
Calcul deplasare elastica v3 :

![]()
Calculul deplasarii pe orizontala u3
Forta egala cu unitatea aplicata pe
orizontala in punctul 3 conduce la o diagrama unitara de moment
incovoietor ![]() antisimetrica.
antisimetrica.
Calcul reactiuni din incarcarea cu forta unitate:
![]()
![]()
![]()
Calcul deplasare elastica u3:
![]()
![]()
![]()
Se observa ca in expresia deplasarii u3 termenii sint doi cite doi egali si de semn contrar, deci a rezultat u3=0.
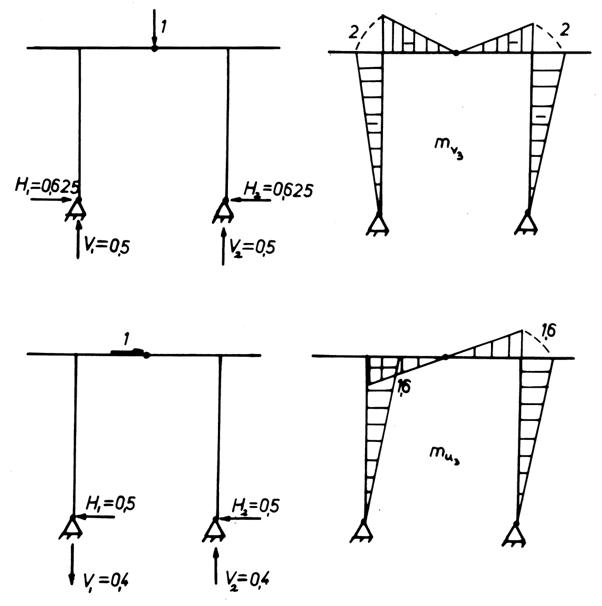
Fig.25 Diagrame de moment incovoietor din incarcrea cu forte unitate pe directia deplasarii cautate
Din analiza rezultatelor obtinute in calculul deplasarilor se desprind urmatoarele concluzii:
-rezultatul integrarii a doua diagrame simetrice este diferit de zero;
-rezultatul integrarii unei diagrame simetrice cu o diagrama antisimetrica este egal cu zero.
-deformata unei structuri simetrice, incarcata simetric, este simetrica. Sectiunea de pe axa de simetrie se poate deplasa numai pe directia axei de simetrie iar rotirea relativa este o deplasare simetrica.
Cadre simetrice incarcate antisimetric
Exemplul 7: Fie cadrul din figura 26
incarcat antisimetric. Se cere sa se traseze diagramele de eforturi
si sa se calculeze deplasarile ![]() considerind
EI=18000KNm2.
considerind
EI=18000KNm2.
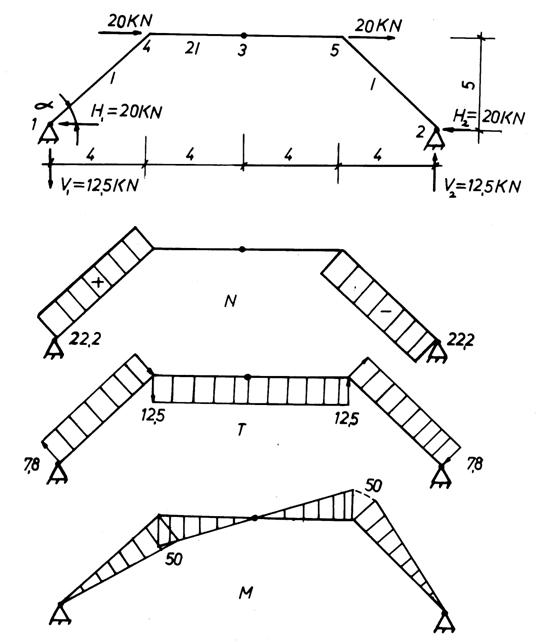
Fig.26 Cadru simetric incarcat antisimetric, diagrame de eforturi N,T,M
Calculul reactiunilor:
![]()
![]()
![]()
![]()
Concluzia ce se desprinde din calculul reactiunilor este ca: " la structurile simetrice, incarcate antisimetric, reactiunile sint antisimetrice".
![]()
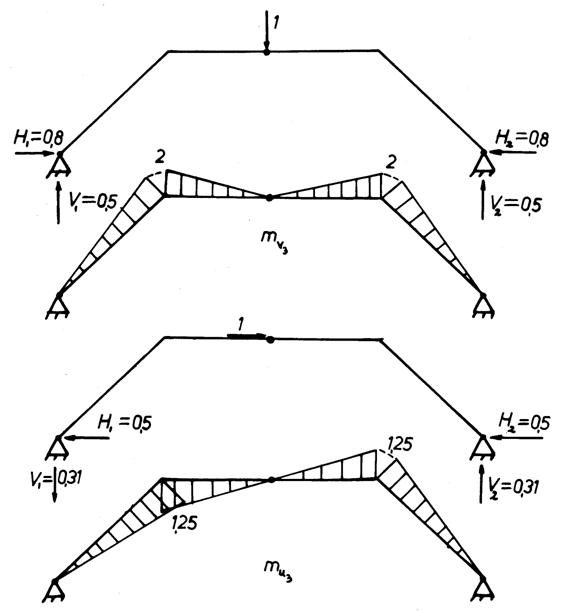
Fig.27 Diagrame de moment incovoietor, din incarcarea cu o forta unitara pe directia deplasarii cautate
Diagramele de eforturi:
Calculul efortului axial si al fortei taietoare pe stilpul inclinat 1-4:
![]()
![]()
Din analiza diagramelor de eforturi rezulta urmatoarele concluzii: "la structurile simetrice incarcate antisimetric, diagramele de forta axiala si de moment incovoietor sint antisimetrice, iar diagrama de forta taietoare este simetrica"
Calculul deplasarii v3
Forta egala cu unitatea aplicata pe orizontala in punctul 3 conduce la o diagrama unitara de moment incovoietor mv3 simetrica.
![]()
![]()
![]()
Calculul deplasarii u3
![]()
![]()
![]()
![]()
Deoarece diagrama M este o diagrama antisimetrica, rezultatul integrarii ei cu diagrama mv3 este egal cu zero.
Concluziile desprinse din calculul deplasarilor sint:
-rezultatul integrarii a doua diagrame antisimetrice este diferit de zero.
-rezultatul integrarii unei diagrame antisimetrice cu o diagrama simetrica este egal cu zero.
-deformata unei structuri simetrice, incarcata antisimetric este antisimetrica. Sectiunea de pe axa de simetrie se poate deplasa numai pe normala la aceasta axa, celelalte doua deplasari sint egale cu zero.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |