
Controlul sistemelor pneumatice
Exista doua metode de baza de a dezvolta circuitele de control functionale:
O metoda intuitiva adesea chemata incercarea-si-eroarea metoda;
Metodica (sistematica) proiectarea schemei s-a bazat pe intelegerea de a asocia reguli si instructiuni.
In primul caz proiectantul necesita experienta considerabila si intuitia; plus faptul care aceasta metoda este timpul consumator unde circuitele complicate sunt implicate.
Cand proiectand conform cu a doua metoda, o informatie din principiile de baza si tehnicile de succesiune de proiectare sunt suficiente.
Facand abstractie de metoda folosita, obiectivul final este sa proiecteze in mod corect si fiabil unui sistem in functionare. In trecut dezvoltarea s-a dedicat mai mult sistemului cu o cantitate minima de elemente, acum punctual cheie s-a mutat spre siguranta de executare si durabilitate care poate sa fie realizata cu ajutorul proiectarii metodice. Ca rezultat al acestui model succesiunea de tehnicii functionale ale unui sistem este clar reflectat la usor-de-citit circuitele si documentatia tehnica.
In acest caz sistemul de control este proiectat conform cu o procedura specifica care are drept rezultat mai putina incredere pana cand factorul uman este aplicat. Oricum exista multe cazuri unde proiectarea metodica foloseste un numar mare de elemente in sistem decat a metodei intuitive.
Proiectarea unui circuit de sistem general pneumatic este executat in urmatoarele etapele:
Descriere de functionarea a circuitului;
Proiect al diagramei ,,inlocuire-pasul'' (diagrama de succesiune) pentru punere in functiune procesul in intrebare;
Reprezentare de elementele pneumatice in schema de montaj de baza;
Reprezentare de elementele electrice in schema de montaj de baza;
Compilare din documentatia de serviciu;
Creand o piesa de schimb si o lista de informatie tehnica.
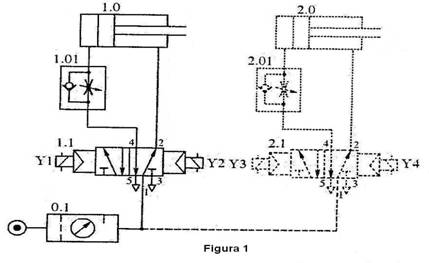
Cand proiectand circuitele pneumatice de baza mergand pe urma recomandarilor urmeaza sa sa fie lipite de (figura 1):
a) Dispunerea fizica a unor elemente in schema de montaj ar trebui sa activeze debitul remarcabil pentru a fi in directie opusa;
b) Cilindrii si distribuitoarele de control sunt localizate orizontal in schema de montaj si tijele de cilindru urmeaza sa se extinda de la stanga la dreapta.
Un numar a sistemului de numeratie se intrebuinteaza sa identifice componentele individuale intr-o schema de montaj pneumatica dupa cum urmeaza:
Instalatia de serviciu pneumatic;
1.0, 2.0 etc. Conducand mecanisme;
Verificati elementele;
.01, .02 etc. Partile componente intre elementele de control
si stimuland dispozitivele.
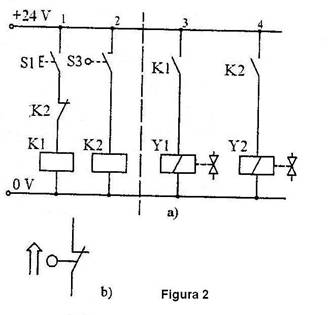
In cazul schemelor de circuit electric (Figura 2,a):
a)
 Aranjarea de componente
in schema electrica ar trebui sa activeze o directie de sus de
jos al semnalului sa rezulte;
Aranjarea de componente
in schema electrica ar trebui sa activeze o directie de sus de
jos al semnalului sa rezulte;
b) Circuitele de sistem avand intermediar sau un control de retransmisie ca sa poata sa fie impartit in logic si o piesa de control. In ultimele elemente de control (bobinele cilindrice, mecanismul de declansare a releelor basculante) ale schemelor in miscare sunt localizate de la stanga la dreapta conform cu secventa de actionare de sistem. Proiectarea de astfel de diagrame de circuit are nevoie de o cale creatoare de atunci separarea corecta si de loialitate fata de inlocuirea exigenta-pasul diagrama (diagrama de succesiune) este din punct de vedere practic imposibila.
Componentele unei scheme de montaj are o numire alfanumerica in conformitate cu directia semnalului sa curga de stanga la dreapta. Comutatoarele executand functionarile cheie ca de exemplu pornirea sau oprirea indicata in discretia de proiectantului. Componentele electrice sunt reprezentate in schema de montaj in pozitia lor initiala. Daca pozitia comutatoarelor initiale este aratata ca activata se afla o sageata in stanga ei (figura 2,b) curent trecut prin acest comutator in pozitia initiala.
1. Controlul direct si indirect a unui cilindru pneumatic
Cand alegand o metoda de control in partea electrica a unui sistem (control direct sau indirect) ca urmare ar trebui sa fie luat in consideratie:
Schimband forta supapei de control pneumatic;
Dimensiunea bobinei cilindrice si voltaj;
Complexitatea schemei electrice.
Daca acolo nu furnizeaza repede miscarea unui piston de cilindru in sistemul pneumatic, distribuitorul de control care controleaza nevoia de cilindru numai are dimensiunile mici si forta necesara pentru comutatorul lui este neglijabila.
In acest caz metoda de control este utilizata. Un exemplu pentru a ilustra folosirea de controlul direct este pentru ca sarcinii de a fixa piesa de prelucrat intr-un un dispozitiv de rotire (figura 3,a).
Intr-un cilindru cu simpla actiune un cilindru 1.0 cu un diametru de piston de 25 mm urmeaza sa fixeze piesa de prelucrat cand un buton este apasat. Daca butonul este eliberat strangerea piesei de prelucrat este slabita.
Pentru a controla cilindrul cu simpla actiune este folosita a 3/2 parte a controlului supapei directionale (figura 3,b). De atunci in acest caz special cilindrul este mic, o viteza mica a curentului de aer este necesara pentru a o controla. Actiunea de prindere poate sa fie comandata direct cu un intrerupator sa schimbe directia comutatorelor pe solenoidul supapei de control directional (figura 3,d).
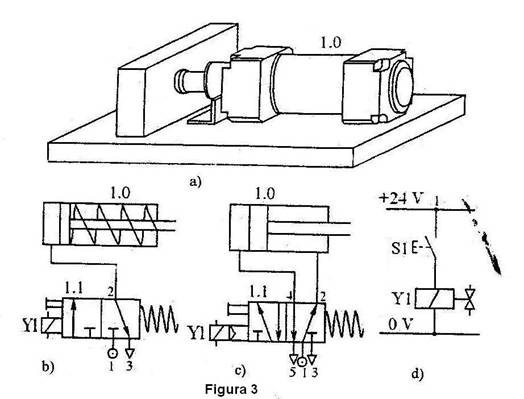
Apasand intrerupatorul S1, curentul se va scurge prin infasurarea bobinei cilindrice Y1 care comuta supapa de control 1.1. Aerul comprimat se va scurge prin supapa din intrarea 1 in intrarea 2 si va face ca pistonul sa se miste, astfel se va extinde tija pistonului si va comprima resortul. Daca se elibereaza intrerupatorul 1, curentul nu va mai curge catre solenoid si supapa, sub actiunea resortului sau, revine la pozitia initiala. Tija cilindrului se va retrage si aerul din recipientul functional (fara tija) va curge afara in atmosfera prin evacuarea 3 a supapei.
Prin folosirea supapei tip 5/2 (figura 3.c) circuitul functioneaza ca mai sus. Supapa 1.1 este activat prin actionarea intrerup torului S1. Aerul comprimat din intrarea 1 curge c tre iesirea 4, miscand astfel pistonul si extinzand tija. Dupa ce intrerup torul este eliberat, supapa trece inapoi in pozitia initial , aerul trecand din 1 prin 2 ajunge in recipientul de la cap tul tijei, unde tija pistonului se retrage si aerul din recipientul functtonal (f r stinghie) curge in atmosfer prin evacuarea 5.
Dezavantajele unui astfel de circuit de control sunt urm toarele:
Dac intrerup torul este ap sat pentru o perioad scurt de timp, tija pistonului va avansa partial si apoi se va retrage. Acest lucru se intampl deoarece solenoidul se stinge si permite resortului de intoarcere s readuc supapa inapoi in pozitia initial . De aceea este posibil ca tija pistonului s nu inainteze niciodat pan la cap t deoarece raspunde direct de actionarea asupra S1.
Dac este nevoie de un curent mai puternic pentru a activa solenoidul, contactele intrerup torului se pot arde sau exploda. In acest caz, contactele se vor inchide si tija va fi pastrat in pozitia extins
Dac cilindrul are un diametru mare si o curs lung a pistonului, ar trebui folosit o supap de control cu o sectiune de curgere mai larg si deci va avea nevoie de un solenoid mai puternic pentru a face comutarea. Prin contactele intrerup torului nu va putea trece un astfel de curent, asadar ar trebui folosit metoda de control indirect
Controlul indirect este de asemenea folosit si in cazul sistemelor comandate de la distant
In cazul controlului indirect, in mod normal, se renunt la contactele intrerup torului in favoarea releurilor.
Spre exemplu, putem considera controlul cilindrului cu actiune simpla al unei prese de foite metalice. Tija pistonului acestui cilindru trebuie s se extind cand intrerup torul este actionat si sa se retraga atunci cand este eliberat (figura 4.a). Cilindrul are diametrul de 250mm si de aceea are nevoie de o rat mare de curgere a aerului pentru a putea fi operat.
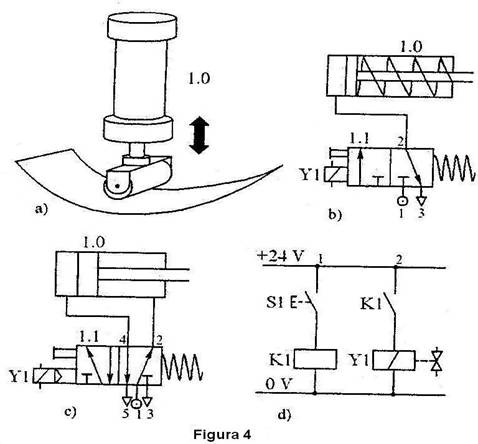
Schema circuitului de control este ilustrat in figura 4d. Cand intrerup torul S1 este actionat, curentul este trimis catre inf surarea releului K1. Contactele K1 ale acestui releu, cand sunt inchise, permit curentului s treac spre inf surarea bobinei Y1. Valva de control de tip 3/2 (1.1) se comut (figura 4b) si presiunea aerului ajunge la valva iesirii 2, intorcandu-se la pozitia initial . Recipientul de la cap tul funcional este conectat la iesirea 3 prin portul 2 si tija pistonului revine la pozitia initial sub actiunea resortului.
In scopul rezolv rii problemei, figura 4c reprezint folosirea unei supape de control tip 5/2 cu un singur solenoid; pentru a conecta aceast solenoid se foloseste diagrama ciruitului electric din figura 4c.
2. Realizarea functiilor logice de baz
In sistemele de control industriale, contactele intrerup torului si releele se folosesc in diferite combinatii, care in schema circuitului se marcheaza cu blocuri. Ele sunt folosite pentru a rezolva anumite probleme, ca: furnizarea blocurilor in concordant cu cerintele de siguranta, blocuri pentru dispozitivele de furnizare a semnalului manual, mentenanta releelor si a indicatoarelor de oprit/pornit.
Blocurile pot fi impartite in 3 categorii mari:
blocuri logice
blocuri de memorie
blocuri de comutare.
2.1 Blocuri logice
Din punct de vedere functional, blocul logic este alc tuit din unul sau mai multe perechi de contact.
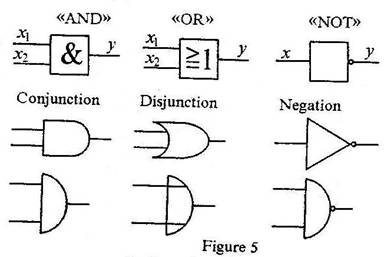
Functiile logice elementare care formeaz blocurile sunt: AND, OR, NOT. Reprezentarea lor grafic este oferita in figura 5.
Functiile lor logice pot fi realizate atat prin componente pneumatice, cat si electrice.
Pentru a realiza functia logica "AND" (poart logica) este insuficient s conect m contactele in serie (fig. 6a). Inchiderea contactului S1 nu va furniza un semnal la iesire deoarece contactul S2 va r mane deschis. Dac se inchide doar contactul 2 nu se va obtine semnalul final. Acest semnal se va realiza numai dac ambele S1 si S2 sunt inchise.
In practic , astfel de functii logice pot avea mai multe intrari. Figura 6b reprezint realizarea functiei logice "AND" conceput pentru 3 iesiri cu contactele legate in serie. Pentru a obtine semnalul final este necesar sa se inchid simultan toate 3 contactele S1, S2 si S3.
Realizarea practic a functiei logice "AND" poate fi ilustrat folosind exemplul unei prese de stantat. Stanta coboara numai cand garda este inchis ; acest lucru se poate face prin ap sarea intrerup toarelor S1 si S2 (figura 6c). Dac vreuna din aceste cerinte nu este satisfacut , stanta se ridic imediat si se blocheaz in pozitie ridicat . Cilindrul pneumatic 1.0 este actionat de o valv de control tip 5/2 cu un solenoid, cu intoarcerea resortului (fig. 6d).
Schema ciruitului electric ce realizeaz algoritmul de control pentru acest caz este reprezentat in figura 6e.
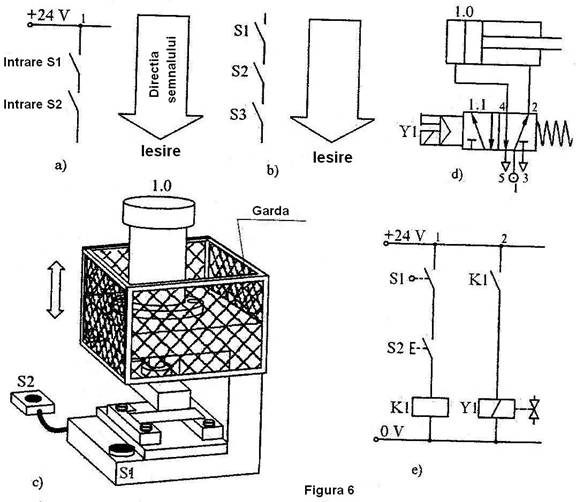
Atata timp cat Intrerup toarele S1 si S2 nu sunt actionate, circuitele 1 si 2 sunt deschise. Cand se apas unul din aceste intrerup toare, circuitele r man deschise. Cand garda este inchis (coborat , S1 este actionat) si operatorul actioneaz intrerup torul S2, curentul curge spre infǎsurarea releului K1. Contactul K1 se inchide, solenoidul Y1 este activat comutand astfel supapa de control 1.1. Aerul comprimat trece acum din intrarea 1 in iesirea 4 a supapei si tija cilindrului 1.0 se extinde. Aerul din recipientul de la cap tul tijei cilindrului trece in atmosfera prin iesirea 3. Dac S1 si S2 sunt eliberate, contactul K1 se opreste si solenoidul va fi dezactivat. Resortul intoarce supapa la pozitia initial si aerul comprimat este redirectionat c tre iesirea 2. Tija pistonului se retrage si aerul din recipientul de la cap tul f r tij trece in atmosfer prin portul 5.
Intrerup toarele S1 si S2 sunt conectate in serie dar ele nu realizeaz functia unui aparat sigur atata timp cat ambele maini ale operatorului sunt folosite s opereze presa. In practic , astfel de conect ri nu ar trebui fi folosite in acest scop. Este mai adecvat a se folosi conexiunea cu 3 iesiri: un semnal s vin de la garda si celelalte 2 de la mainile operatorului. (fig. 6b)
Pentru a realiza functia logic "OR", contactele sunt conectate intre ele in paralel (fig. 7a). Dac ambele contacte sunt dechise nu exist semnal la iesire. Dar dac cel putin unul din cele 2 contacte se inchide (S1 sau S2), semnalul apare la iesire.
Realizarea functiei este demonstrat folosindu-se exemplul unui
imping tor de carton de pe o band transportoare pe alta (figura 7b), care este controlat de intrerup toarele S1 si S2. Dac ambele intrerup toare sunt ap sate simultan, cilindrul 1.0 impinge cartonul. Ambele intrerup toare sunt ap sate de o supap tip 5/2 cu un solenoid (figura 7c).
Atata timp cat intrerup toarele S1 si S2 nu sunt ap sate, curentul nu ajunge la inf surarea releului K1 (figura 7d). Dac intrerup torul S1 este activat, curentul trece spre infǎsurarea K1 prin circuitul 1, iar dac S2 este activat, prin circuitul 2.
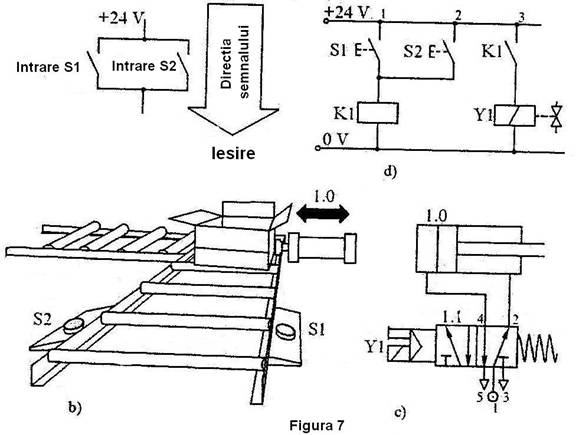
Activarea oricaruia dintre S1 sau S2 rezulta in inchiderea contactului K1 si curentul trece prin circuitul 3 la solenoidul Y1, comutand supapa 1.1. Aerul comprimat circula de la sursa de curent c tre intrarea 1, apoi c tre 4: tija pistonului cilindrului se extinde. In acest timp, aerul va trece din recipientul de la cap tul tijei in atmosfer prin portul 3. Dac ambele intrerup toare sunt eliberate, contactul K1 se va opri, solenoidul se va stinge si supapa de control va reveni in pozitia initial , caz in care aerul comprimat de la intrare curge c tre iesirea 2. Tija cilindrului va fi retras si aerul din recipientul de la cap tul f r tija va iesi in atmosfer prin portul 5.
Functia logic "NOT" se realizeaz dupa cum urmeaz
Dac intrerup torul este activat (figura 8a), exist semnal la iesire. Si vice-versa, la deconectare, semnalul dispare.
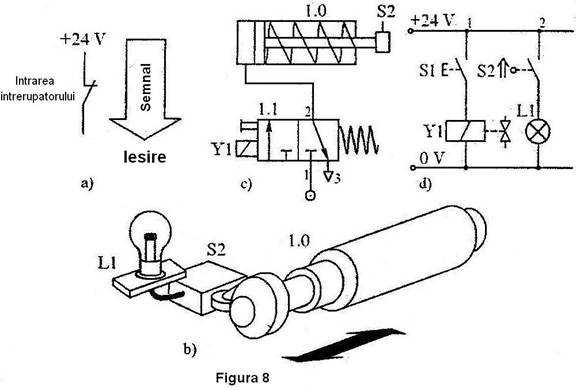
Ca un exemplu practic la cele spuse mai sus, putem considera controlul pozitiei tijei cilindrului. Cand se activeaz intrerup torul, tija unui cilindru cu actiune simpl avanseaz (fig. 8b). Un intrerup tor de limitare controleaz pozitia initial a tijei pistonului printr-o parghie. Lampa L1 indic activarea cilindrului si indic faptul c tija pistonului nu este la pozitia initial . Cilindrul este controlat printr-o supap de control tip 3/2 cu un solenoid (fig. 8c).
Realizarea functiei logice "NOT" este ilustrat de schema circuitului electric in figura 8d. In pozitia initial , intrerup torul S2 normal inchis, este aprins si contactul s u este deschis. Ap sarea intrerup torului S1 rezult in activarea bobinei Y1 si extinderea tijei pistonului, care elibereaza intrerup torul de limitare S2. Contactul s u este acum inchis si curentul trece in lampa L1, care lumineaz si indic faptul c tija pistonului nu ste in pozitia initial
2.2 Blocuri de memorie
Contactele intrerup toarelor si releele pot fi folosite pentru a tine bobinele supapelor de control, contactele si l mpile in starea "ON" (deschis) pentru perioade lungi de timp f r folosirea altor semnale aditionale. De exemplu, intr-un sistem cu doi cilindri, unul din ei trebuie s r man cu tija pistonului extins atata timp cat aceasta operatiune mentine conditia cerut de acest sistem de procesare.
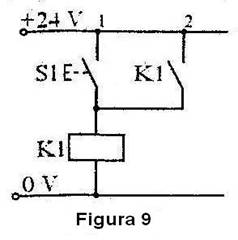
Componenta de baz a unei memorii este un releu echipat cu un contact de inchidere (contact de auto-sustinere). Cu o activare momentan a intrerup torului S1, releul K1 este activat (figura 9) iar ca urmare contactul sau K1, conectat in paralel cu intrerup torul, se inchide si tine releul permanent in starea "ON".
Dezavantajul unui astfel de circuit este ca releul st in starea ON pentru o perioada lung de timp in timp ce este conectat la o surs de curent. Acest lucru poate fi totusi evitat prin instalarea unui intrerup tor aditional pentru a opri contactul K1 si astfel pentru a opri releul. Acest intrerup tor poate fi conectat in dou moduri, fiecare cu avantajele si dezavantajele sale. Drept urmare, exista dou circuite de comutare: dominant ON si doiminant OFF.
Circuitul Dominant ON
Cand intrerup torul S1 este activat (figura 10a) curentul este trimis c tre infǎsurarea releului K1; contactul K1 al acestui releu se inchide. Dup ce S1 este oprit, curentul va opri contactul intrerup torului S2 care inc nu este activat. Releul r mane aprins. Operarea intrerup torului S2 rezulta in ruperea leg turii cu contactul K1, deci curentul curge c tre infǎsurarea releului. Dac intrerup toarele comutatoarelor S1 si S2 sunt activate si tinute neap sate in acelasi timp, releul st aprins. De aceea un astfel de circuit se numeste "Circuit Dominant ON" si realizarea lui se poate face prin exemplul unei supape de stingere (figura 10b).
Supapa se deschide si se inchide printr-un cilindru cu dubl actiune 1.0. Cand se apas intrerup torul de deschidere (figura 10d) tija cilindrului se extinde si st in aceast pozitie pan cand intrerup torul de inchidere se apas . Butonul care comanda deschiderea supapei trebuie s surclaseze butonul care o inchide. Activarea cilindrului este facut printr-o supap de control tip 5/2 cu un solenoid (figura 10c).
Cand se apas intrerup torul "Deschis", releul K1 devine sustinut de contactul K1.2 (adic este alimentat de alt circuit). Chiar dac intrerup torul "Deschis" este eliberat, curentul va trece c tre infǎsurarea releului K1 prin circuitul 2 - prin contactul care in mod normal este inchis, intre intrerup torul "Inchide" si K1.2. Alt contact K1.1 cand se inchide, alimenteaz solenoidul Y1. Tija cilindrului avanseaz si deschide supapa. Cand se apas intrerup torul "Inchis" circuitul 2 se opreste, releul K1 se opreste si solenoidul este dezactivat. Tija cilindrului se retrage si inchide supapa. Dac ambele butoane sunt ap sate simultan, curentul curge c tre inf surarea releului K1 prin circuitul 1 si supapa
r mane deschis
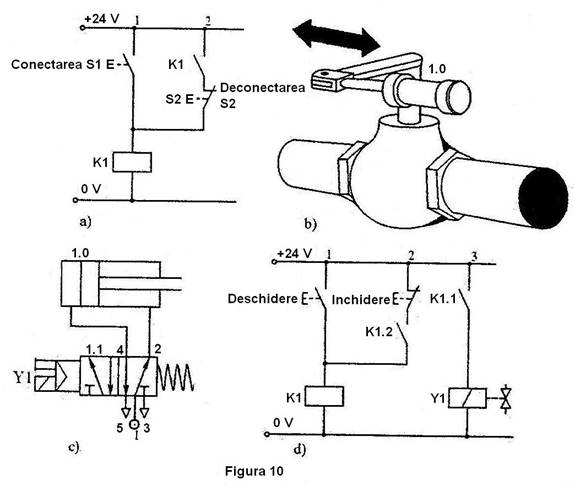
In acest circuit, "Deschis" surclaseaz "Inchis". Aditional, acest circuit de auto-sustinere are o caracteristic de memorie datorat contactului K1.2 care st inchis dup eliberarea intrerup torului "Deschis".
Circuitul Dominant OFF
In acest circuit S1 si S2 sunt comutate in serii (figura 11). Aici S2 surclaseaz S1. In cazul oper rii simultane, circuitul care alimenteaz infǎ-surarea releului K1 este intrerupt.
 Realizarea unui astfel de circuit poate fi considerat
folosind urmatorul exemplu.
Realizarea unui astfel de circuit poate fi considerat
folosind urmatorul exemplu.
Un magnet instalat pe o parghie de plutire (figura 12a) afecteaz intrerup torul unui arc lamelar f r contact si activat magnetic, cand lichidul din bazin ajunge la nivelul prezent. La operarea intrerup torului arcului lamelar, un semnal de alarm este aprins si st activ pan la dezactivarea printr-un intrerup tor. Semnalul de alarma nu ar trebui s opereze dac acest intrerup tor nu este activat.
Rezolvarea acestei probleme este reprezentat in forma unei scheme a circuitului electric in figura 12b.
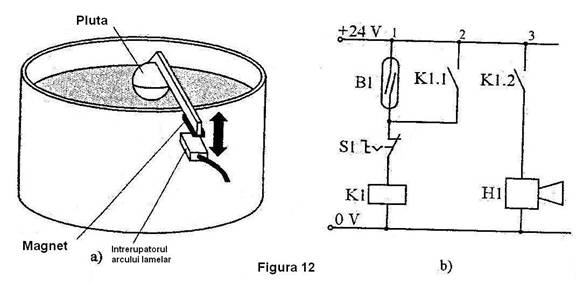
Cand se actioneaz intrerup torul arcului lamelar, releul K1 se aprinde, unul din contactele sale K1.1 serveste pentru auto-sustinere si altul K1.2 pentru activarea alarmei. Aceast alarm poate fi dezactivat printr-un intrerup tor de oprire S1; dac acest intrerup tor isi intrerupe contactul, alarma nu va suna cand contactul intrerup torului arcului lamelar este operat.
Cu privire la cazul controlului automatic al nivelului, problema si solutia sunt urmatoarele:
Cand ajunge la nivelul prezent al lichidului din bazin, parghia de plutire activeaz intrerup torul de limita cu parghia rotativ (figura 13a). Cel din urm semnaleaz o supapa care, in timp ce se deschide, reduce nivelul lichidului din bazin. Chiar dac exist un semnal de la intrerup torul de limit , operatorul ar trebui s poata opri scurgerea lichidului printr-un intrerup tor.
Solutia la aceast problem se realizeaz prin:
Cand lichidul din bazin atinge nivelul prezent, parghia de plutire aprinde intrerup torul de limita S1. Prin contactul sau si prin contactele normal inchise ale intrerup torului S2, curentul curge c tre infǎsurarea releului K1 care devine auto-sustinut prin contactul K1.1 si inchide circuitul care alimenteaz solenoidul Y1 folosind contactul K1.2 (figura 13b). Tija cilindrului 1.0 se extinde si porneste scurgerea lichidului. Releul K1 va sta activat chiar si dup ce parghia a eliberat intrerup torul S1. De aceea solenoidul Y1 va r mane comutat pan cand
ap sarea intrerup torlui S2 opreste circuitul 1 care alimenteaz K1. Pentru a preveni inchiderea circuitului f r nici o aciune din partea operatorului, s-a prevazut blocarea intrerup torului S2. Dac S1 si S2 sunt eliberate in acelasi timp, S2 va fi dominant deoarece ambele intrerup toare sunt conectate in serie.
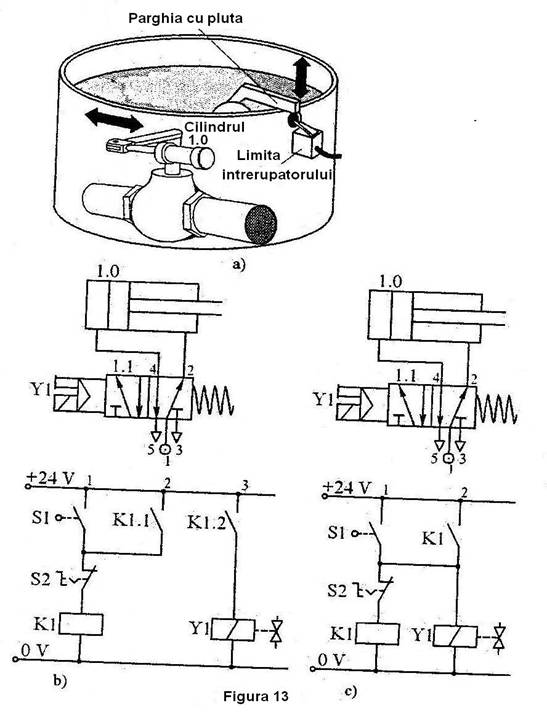
In acest circuit dou perechi de contacte K1.1 si K1.2 sunt folosite. Cand sarcinile sunt mici, ca in acest caz, conexiunea bobinei prin a doua pereche de contacte K1.2 poate fi optional si schema circuitului electric va fi precum este descris in figura 13c.
Totusi, pentru a facilita mentenanta si g sirea greselilor, este recomandata folosirea celei de-a doua perechi de contacte.
2.3 Contacte transformate
Contactele acestui grup pot forma o parte a unei unitǎti logice sau a unei unitǎti de memorie. Contactele transformate sunt folosite pentru a indica starea sistemului sau ale elementelor sale individuale, precizand deci dac infǎsurarea releului este alimentat
 Contactele transformate pot fi echipate atat cu relee cat
si cu intrerup toare. Cu ajutorul lor se poate creea o ordine
logic complex . Au trei contacte (arcuri
lamelare) - o intrare si dou iesiri.
Contactele transformate pot fi echipate atat cu relee cat
si cu intrerup toare. Cu ajutorul lor se poate creea o ordine
logic complex . Au trei contacte (arcuri
lamelare) - o intrare si dou iesiri.
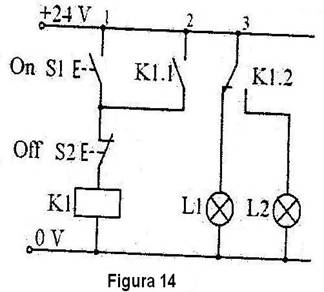
In figura 14 este ilustrat un contact transformat ce produce comutarea succesiv , una din dou lampi indicand starea releului K1. Pan la pornirea sistemului, lampa verde L1 este pornit . Releul K1 are un singur contact normal deschis K1.1 si un contact transformat K1.2. Pan cand intrerup torul de pornire S1 este ap sat, curentul trece
c tre lampa L1 prin contactul K1.2. Cand aceast lamp este aprins , ea semnaleaz starea de pre-pornire a sistemului. Prin ap sarea intrerup torului S1,
inf surarea releului K1 este alimentat ; releul r mane pornit prin contactul inchis K1.1 (chiar dac S1 a fost eliberat) si contactul K1.2 schimb curentul s alimenteze lampa L2 care indic faptul c sistemul este pornit. Cand se opreste releul prin intrerup torul S2, lampa L1 porneste din nou deoarece K1.2 revine la pozitia initial
Sisteme de memorie pneumatice bistabile
In precedentele exemple, principiul controlului opririi unui aparat a format baza function rii unui circuit electric cu memorie, care se realiza prin folosirea unor relee de auto-inchidere. Aceast solutie este necesar pentru sistemele in care se utilizeaz supape de control cu un singur solenoid (monostabile). Ele
r man pornite pan cand semnalul care alimenteaz solenoidul este intrerupt.
O solutie alternativ consta in aplicarea supapelor de control bistabile care au abilitatea de a "memora" semnalul. Semnalul care controleaz astfel de supape poate fi foarte scurt ca durat . Circuitul de control este mai simplu dar foloseste un numar mai mare de bobine deoarece fiecare supap este dotat cu dou bobine. Aceste circuite sunt preferate acolo unde un caz de urgent poate ap rea datorit unei pierderi de curent. Supapele de control bistabile r man in pozitiile curente chiar dac isi pierd alimentarea, lucru foarte important mai ales in cazul aparatelor de prindere.
 Ca un exemplu de folosire a supapelor de control
directional bistabil putem folosi urm toarea problem .
Tija unui cilindru cu dubl actiune trebuie s
avanseze dup ce butonul unui intrerup tor
electric a fost momentan ap sat. Trebuie s
r man
in pozitia maxim de avansare pan cand alt buton al altui
intrerup tor este ap sat si primul buton
este eliberat. Dup acest lucru, tija cilindrului se retrage
si st in pozitia initial
pan cand primul intrerup tor
este actionat din nou. Viteza misc rii tijei cilindrului ar
trebui s fie ajustabil independent de
directia de miscare. Solutia acestei probleme o putem g si
astfel.
Ca un exemplu de folosire a supapelor de control
directional bistabil putem folosi urm toarea problem .
Tija unui cilindru cu dubl actiune trebuie s
avanseze dup ce butonul unui intrerup tor
electric a fost momentan ap sat. Trebuie s
r man
in pozitia maxim de avansare pan cand alt buton al altui
intrerup tor este ap sat si primul buton
este eliberat. Dup acest lucru, tija cilindrului se retrage
si st in pozitia initial
pan cand primul intrerup tor
este actionat din nou. Viteza misc rii tijei cilindrului ar
trebui s fie ajustabil independent de
directia de miscare. Solutia acestei probleme o putem g si
astfel.
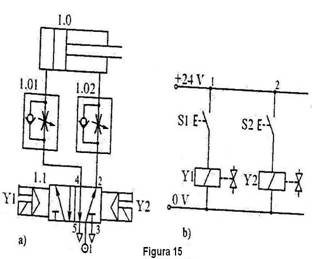
Ap sarea instantanee a intrerup torului S1 (figura 15b) aplic tensiune direct c tre solenoidul Y1 a supapei 1.1, care apoi se comuta si aplic un semnal pneumatic prin portul 4 in recipientul de la cap tul f r tij al cilindrului 1.0, fortandu-i tija s avanseze. Chiar dac semnalul de la Y1 este inl turat, supapa isi mentine pozitia si tija pistonului continu s se miste pan cand intrerup torul S2 este ap sat. In acest timp, ativarea intrerup torului S2 nu afecteaz in nici un fel sistemul. Dac nu exist semnal la Y1, semnalul care vine de la S2 la solenoidul Y2 va schimba supapa 1.1 la pozitia sa initiala, deci aerul trece prin portul 2 in recipientul de la cap tul cu tija al cilindrului f cand astfel ca tija pistonului s se retraga. Tija pistonului r mane in aceast pozitie pan cand apare un nou semnal de la S1.
Dac ambele bobine Y1 si Y2 devin activate prin ap sarea simultan a ambelor intrerup toare, supapa de control nu se schimb dar isi pastreaz aceeasi pozitie pe care o avea atunci cand ultimul semnal singular a fost primit. Acest lucru este cunoscut precum caracteristica de memorie si bistabila.
Este de preferat folosirea controlului indirect al bobinelor prin contactele releului deoarece, in acest caz, contactele intrerup torului nu se supra-alimenteaz si pericolul unui scurt circuit este mai mic.
Pentru a controla viteza tijei pistonului intr-un circuit pneumatic se folosesc supape de control de curgere uni-directional . Aerul curge prin supapele f r iesire in recipientul cilindrului 1.0 f r probleme. Supapa de reglaj 1.01 controleaz viteza de retragere a tijei pistonului, in timp ce supapa de reglaj 1.02 controleaz avansarea. Acest lucru se numeste controlul fluxului de iesire. Aceste supape au un ajustament independent care faciliteaz stabilirea vitezei necesare pentru miscarea pistonului in ambele directii.
Procesul inc rc rii cutiilor de carton intr-un transportor printr-un cilindru cu dubl actiune, poate fi considerat ca un exemplu la cele explicate mai sus (figura 16a). Cand intrerup torul este activat, tija cilindrului 1.0 se extinde la maxim. Aceast trebuie s ating pozitia maxim de extindere inainte ca operatorul s dea semnalul retragerii tijei folosind al doilea intrerup tor, intrerup torul de limitare S2. Parghia rotativ confirm ajungerea tijei pistonului la pozitia maxim de extindere. Tija pistonului trebuie s -si continue avansarea chiar dac primul intrerup tor este eliberat.

Vitezele pistonului trebuie s fie ajustabile independent in ambele directii. Deoarece panoul de control se afl la distant de cilindru, este recomandat folosirea controlului indirect al cilindrului.
Cand se apas
intrerup torul S1 releul K1 se alimenteaz ,
contactele sale se inchid si alimenteaza solenoidul Y1 (figura 16c).
Supapa de control 1.1 se comut in pozitia in care
aerul comprimat circul spre portul 4 al iesirii (b). Tija cilindrului
se extinde chiar dac intrerup torul S1 este eliberat
deoarece supapa de control are memorie. De indat ce tija pistonului este
extinsǎ la maxim, se opereaza intrerup torul
de limita S2. Acum, dac intrerup torul S3 este ap sat,
releul
Vitezele avans rii si retract rii sunt controlate prin supapele de reglaj 1.01 si respectiv 1.02, exact ca in exemplul de mai sus.
Dac intrerup torul S1 este tinut ap sat, avansarea tijei pistonului se va face normal; dar dac se iincearc trimiterea unui semnal c tre Y2, supapa nu se va comuta deoarece exist deja un semnal la Y1. Acest lucru inseamna c din 2 semnale disponibile, cel dominant este primul care ajunge la supapa de control directional.
4. Confirmarea avans rii si retragerii tijei cilindrului
Solutia la aceast problem o consideram folosind urm torul exemplu.
Problema
Confirmarea retragerii totale a unei tije a clindrului cu dubl actiune si
ap sarea unui intrerupator care face ca tija pistonului s avanseze. Tija pistonului trebuie s avanseze total inainte de ap sarea unui alt intrerup tor care s -l fac s se retrag inapoi. Caracteristica distinctiv a acestui sistem este ca tija pistonului trebuie s avanseze usor si s se retrag rapid ca urmare a folosirii unei valve cu evacuare rapid
Solutia
Cand tija pistonului unui cilindru 1.0 este retractat (figura 17a),
intrerup torul de limit S2 este activat si contactele sale normal deschise se inchid (indicat printr-o s geat , figura 17b). In acest caz intrerup torul S3 este numit "normal deschis, activat".
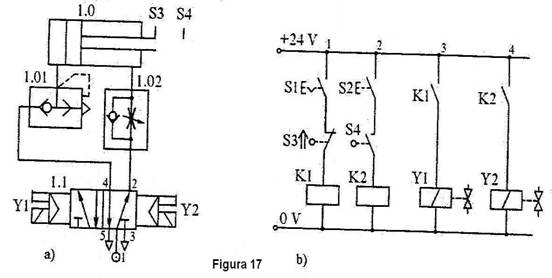
Prin ap sarea intrerup torului S1, curentul este transmis infǎsur rii releului K1 si solenoidul Y1 este alimentat . Supapa tip 5/2 1.1 se comut si aerul incepe s curga prin portul 4 in recipientul de la cap tul f r tij a cilindrului. Avand fluxul aerului in aceast directie, supapa cu evacuare rapid 1.01 nu are efect si astfel tija pistonului avanseaz incet spre dreapta datorit supapei de control al fluxului uni-directionala 1.02. De indata ce tija pistonului incepe s se miste, intrerup torul de limitare S3 este eliberat, deconectand contactele si rupand alimentarea releului K1 si mai departe a bobinei Y1. Datorit caracteristicii bistabile a supapei de control 1.1, r mane in pozitia corespunzand avansului tijei pistonului. Pistonul cilindrului isi continu miscarea lent pan cand tija atinge pozitia maxim si activeaza intrerupatorul de limitare S4. Tija pistonului isi p streaza aceast pozitie pan cand intrerup torul S2 conectat in serie cu S4 este ap sat. Acest lucru duce la activarea releului K1 si a bobinei Y2. Supapa revine la pozitia initial , aerul trece prin portul 2 si supapa f r revenire instalat in paralel cu supapa de reglaj 1.02 si in cap tul tijei cilindrului. Pistonul cilindrului isi schimb sensul rapid datorit faptului c aerul care vine din recipientul de la cap tul f r tij curge afar in atmosfer prin supapa de evacuare rapid 1.01 care are o sectiune larg de curgere. In urma unor anumite aranjamente, tija pistonului se poate retrage mult mai repede decat avanseaz
Este necesar observarea aprovizion rii aerului comprimat c tre sistem, timp in care supapa de control directional 1.1 este intr-o pozitie nedefinit . Pentru a ne asigura c supapa isi ia pozitia initial corect si c tija cilindrului este retras pan la terminarea sursei de aer, este necesar ap sarea butonului de suprascriere manual . Dac acest lucru este omis, tija pistonului se poate extinde prea mult inainte de interventia operatorului, datorit pozitiei initiale incorecte a supapei de control directional.
Al doilea exemplu const in transportul pachetelor de pe o band transportoare pe alta (figura 18a). Pentru a muta statia transportoare de pe banda 1, operatorul trebuie s apese un buton. Acesta r mane in aceast pozitie pan cand operatorul apas alt buton care face ca statia s se miste c tre banda 2. Butoanele nu trebuie s pun statia in miscare dac tija pistonului nu este in pozitia final . Acest lucru este confirmat de senzorii arcului lamelar f r contacte instalat pe corpul cilindrului.
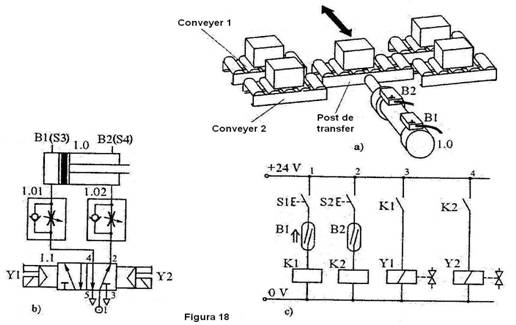
Solutia la aceast problem este urm toarea. Dac tija cilindrului este retras total, senzorul intrerup torului arcului lamelar B1 este activat (figura 18b,c) si contactele sale sunt inchise. Prin ap sarea intrerup torului S1, releul K1 este alimentat si curentul trece prin contactele inchise K1 ale aestui releu
c tre solenoidul Y1. In acest moment, supapa distributional 1.1 este comutat iar solenoidului Y2 este activat si trimite supapa 1.1 in pozitia initial . Aerul comprimat curge prin portul 2 si face ca tija pistonului s se retraga. Senzorul intrerup torului arcului lamelar B1 instalat pe corpul cilindrului este activat
datorit campului magnetic al magnetului inelar permanent montat pe piston atunci cand tija pistonului este retras complet. Daca acest este activat in momentul cand sistemul este in pozitia initial , atunci acest lucru este descris in diagrama de circuit cu o sageat in stanga simbolului intrerup torului arcului lamelar.
Folosirea intrerup toarelor de limitare la ambele capete ale tijei pistonului evit problema emiterii semnalelor simultane c tre ambele bobine ale supapei directionale.
Controlul presiunii
In unele cazuri realizarea operatiunii de procesare poate fi asigurat numai la o anumit valoare strict a presiunii aerului comprimat trimis c tre instalatia folosit
Operatiunile de prelucrare a metalului sunt indeplinite atunci cand forta de prindere necesar a fost atins in aparate (cum ar fi unitatile de menghine pneumatice, mandrina de strangere, etc). In acest scop, sistemul pneumatic este dotat cu relee incorporate care blocheaz pornirea echipamentului pan cand valoarea de presare a presiunii aerului a fost atins
Problema 1
Piesele din plastic sunt intiparite printr-un perforator operat de un cilindru cu dubl actiune. Perforatorul se deplaseaz spre pies prin activarea unui intrerup tor. Cerintele unei tip rituri de inalt calitate sunt: tija cilindrului trebuie sa fie complet extins ; presiunea in cap tul f r tij al cilindrului trebuie s ating valoarea dorit . Pentru a confirma ajungerea tijei pistonului in pozitia maxim de avansare, este folosit senzorul intrerup torului arcului lamelar instalat pe corpul cilindrului. Operatorul trebuie s aiba posibilitatea ajust rii valorii presiunii.
Solutia
Prin ap sarea intrerup torului S1 (figura 19b) releul K1 si solenoidul Y1 a supapei de control directionale tip 5/2 cu 2 bobine se alimenteaz (figura 19a); supapa se comut si face ca tija cilindrului s avanseze. Presiunea din cap tul
f r
tij a cilindrului presurizeaz
releul B1. Cand tija atinge pozitia final , intrerup torul
arcului lamelar f r contacte B2 este
activat, care actioneaz releul B1. Contactele
B1 si B2 cand sunt comutate in serie, se inchid si permit scurgerea
curentului c tre infǎsurarea releului
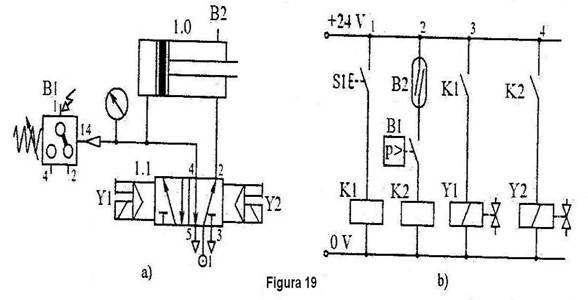
Semnalele trimise c tre bobinele Y1 si Y2 pot avea durate scurte de timp. Un puls energic este suficient pentru a activa aceste semnale. Dac presiunea furnizat releului nu atinge valoarea cu care este presat printr-un resort de ajustare, atunci pistonul nu se va retrage. Releul K2 si prin urmare Y2 se activeaz numai cand ambele contacte B1 si B2 sunt inchise.
Pentru usurarea ajust rii releului este recomandat instalarea unui indicator de presiune.
Tema 2
O pres stanteaz o lam de metal (figura 20a). Tija pistonului cilindrului care conduce ar trebui s inceap s avanseze numai dupa ce a atins valoarea presiunii in linia de alimentare setat de releul de presiune si ambele
intrerup toare au fost activate in acelasi timp. Este necesar permiterea ajust rii vitezei pistonului cilindrului in ambele directii. Tija cilindrului trebuie s se retrag pan la eliberarea oricarui intrerup tor.
Solutia
Prin ap sarea simultan a intrerup toarelor S1 si S2, releul K1 se activeaz . Contactele acestui releu produc alimentarea lui Y1 in supapa de control directional 1.1 (figura 20b,c).
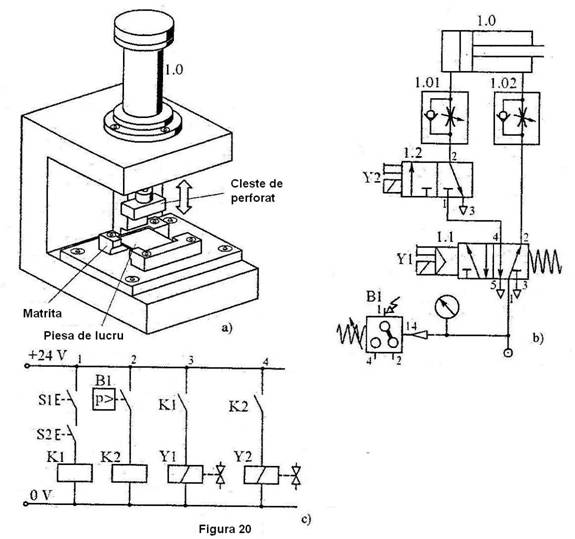
Supapa se comuta si se genereaz
un semnal pneumatic la portul 4 pentru a alimenta supapa 1.2. Cand presiunea
aliment rii din sistem atinge valoarea presetat ,
releul B1 se activeaz si contactele sale produc alimentarea
releului
Deci, in acest caz, se realizeaz functia logic "AND" atat in elementele electrice cat si in cele pneumatice.
Circuitul descris in figura 20c poate include intrerup toarele de limitare: circuitul 3 poate include avansarea provocat de contact si circuitul 4, retragerea. Montajul va bloca miscarea tijei pan cand una din pozitiile finale este atins
Sortarea pieselor
Cand se sorteaz piese din diferite materiale, de exemplu plastic sau metal, se folosesc diferite tipuri de senzori, acestia incluzand atat senzori de proximitate capacitivi folositi pentru obiectele de plastic cat si senzorii de proximitate inductivi pentru metale. Sortarea este f cut pe o banda transportoare folosindu-se un divizor automatic (figura 21a) care este activat de un cilindru cu actiune dubl capitonat la cap tul cursei pistonului (figura 21b).
Solutionarea acestei probleme este posibil folosind schema circuitului ilustrat in figura 21c.
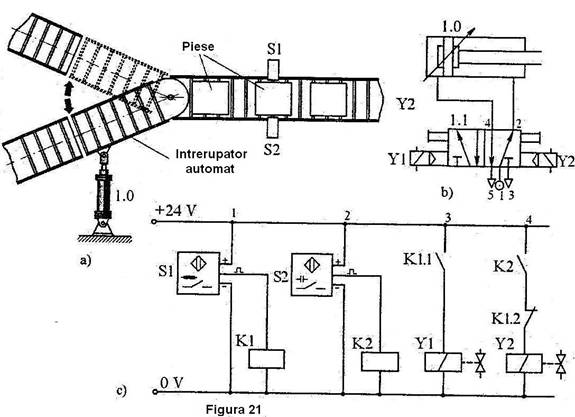
De exemplu, cand un pachet de plastic ajunge in zona de monitorizare a piesei, senzorul de proximitate capacitiv S2 este activat si alimenteaza releul K2, ale c rui contacte comut circuitul 4 care alimenteaz solenoidul Y2 a supapei de control directional tip 5/2. Aceasta din urm trece in pozitia prin care furnizeaz alimentarea cu aer comprimat de la intrarea 1 a aliment rii c tre iesirea 4 si apoi c tre cap tul f r tij a cilindrului 1.0. Tija cilindrului avanseaz pan cand divizorul se intoarce in unghiul presetat ca s se alinieze cu unul din liniile de desc rcare a bandei transportoare.
Cand trece o component
metalic , ambii senzori se activeaz ,
dar curentul este furnizat numai c tre solenoidul Y1
deoarece alimentarea releului K1 rezult in inchiderea circuitului
3 prin contactul K1.1 si ruperea circuitului 4 prin stoparea unui contact
normal inchis K1.2 al releului K1. De aceea inchiderea contactelor
Ca rezultat, divizorul revine in pozitia initial
8. Lipirea pieselor
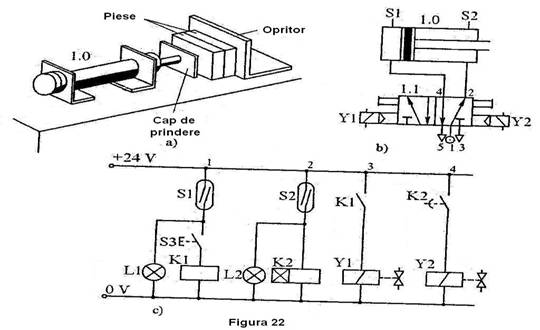
Operatiunea de lipire const in producerea fortei de presare care este aplicat pieselor care trebuiesc unite intr-o perioad de timp si trebuie s asigure formarea unei imbin ri efective.
Asadar, problema lipirii pieselor poate fi formulat astfel: o tija a unui cilindru cu actiune dubl incepe s avanseze dup ce un intrerup tor este
ap sat. Dup ce tija pistonului a atins pozitia final , acesta preseaz piesa timp de 5 secunde si apoi revine la pozitia initial . Piesele, av nd aplicat o solutie de lipire pe suprafetele relevante, sunt plasate intre aparatul de strangere si opritor (figura 22). Tija pistonului cilindrului 1.0 este in pozitia final a retract rii care este indicat de lampa L1, aprins de intrerup torul S1 al arcului lamelar. Prin
ap sarea
intrerup torului S3 (figura 22c) releul K1 este
alimentat, contactul K1 al acestui releu inchide circuitul 3 c tre
solenoidul Y1 al unei supape tip 5/2 1.1 (figura 22b). Supapa trece in
pozitia in care intrarea 1 este conectat la iesirea 4
si aerul comprimat este aplicat la cap tul f r
tij al cilindrului, tija pistonului avansand astfel
impreuna cu aparatul de strangere. Cand pistonul ajunge la pozitia final ,
intrerup torul S2 al arcului lamelar este activat asigurand
alimentarea releului
Aceast problem
poate fi rezovat cu ajutorul unei supape monostabile tip 5/2
(figura 23a). In acest scop, contactul de blocare K1.1 al releului K1 este
plasat in paralel cu intrerup torul S1 al arcului
lamelar si intrerup torul S3, contactul de intarziere
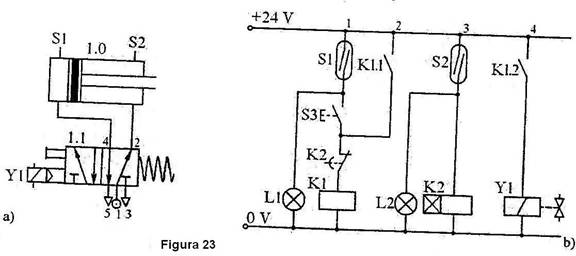
Pistonul, care este prevazut cu un magnet inelar permanent, asigur starea circuitului inchis S1 in pozitia retras . In acest caz, ap sarea
intrerup torului S3 alimenteaz incuietoarea releului K1 prin contatul K1.1. Curentul apoi curge c tre Y1, supapa se comut si tija pistonului avanseaz
pan cand S2 este activat. Dup aceea, ciclul operational este identic ca mai sus.
Intarzieri mai mari de timp pot fi furnizate de relee de timp sau prin incorporarea in circuit a unor elemente aditionale care permit realizarea unui nou ciclu cand butonul de start este ap sat in mod repetat.
9. Controlul deschiderii / inchiderii usilor
In industria computerizat exist probleme legate de deschiderea si inchiderea diferitelor usi, storuri, obloane si porti, dar si miscarea diferitelor bariere, ecrane de protectie si plafoane, etc.
Ca un exemplu al celor de mai sus, putem considera cazul usilor glisante automatice al unui depozit automatizat pentru trecerea intr-un anume sens al unui vehicul robotic (figura 24a). Usile trebuie s se deschid pentru trecerea vehiculului f r sarcini la cap tul travers rii si trebuie s ajusteze viteza. De asemenea trebuie s stea deschise 5 secunde dup ce vehiculul a trecut. Deschiderea usilor trebuie s aib intaietate asupra inchiderii.
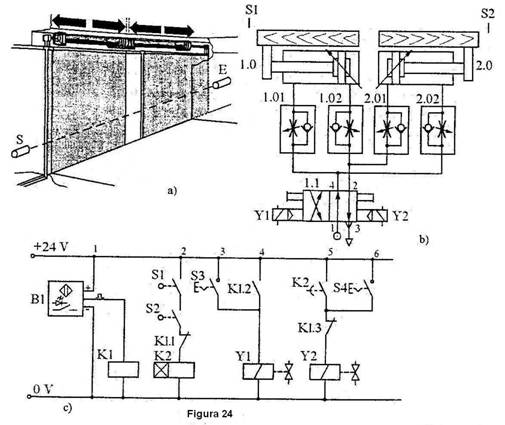
Solutia acestei probleme poate fi indeplinit cu ajutorul senzorilor optici, cilindrilor cu dubl actiune 1.0 si 2.0 cu capiton ri la capetele cursei pistonului, supape de control a fluxului unidirectionale si a unei supape distributionale tip 4/2 bistabile (figura 24b).
Cand vehiculul trece prin raza
senzorului optoelectronic B1 ce trece de la transmit torul
S la receptorul E (figura 24c), senzorul este declansat si alimenteaz
solenoidul releului K1, unde contactul K1.1 inchide circuitul 2 si K1.2
comut circuitul 4 al bobinei Y1 al supapei 1.1. Transformarea
supapei duce la alimentarea capetelor f r
tij ale ambelor cilindre prin aer comprimat. Tijele
pistoanelor lor avanseaz , ceea ce cauzeaz activarea a dou
intrerup toare de limitare S1 si S2 conectate in
serie. Acestea comut circuitul 2 ce alimenteaz
infasurarea releului K2 de intarziere a timpului ale carui
contact
Daca in timpul procesului de inchidere a usilor un vehicul apare in zona de operare a senzorului B1, operarea releului K1 duce la activarea lui K1.2, activarea lui K1.1 si un contact normal inchis K1.3 intrerupe curentul catre Y2. Inchiderea se opreste si usile se deschid din nou, adica deschiderea are intaietate asupra inchiderii.
A doua apasare a intrerupatoarelor S3 si S4 permit deschiderea si inchiderea manuala a usilor.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |