LANTURI CINEMATICE DE AVANS - MASINI-UNELTE
1. Structura lanturilor cinematice de avans
Procesul de generare a suprafetelor prin aschiere pe masini-unelte implica deplasarea continua sau periodica a sculei aschietoare fata de semifabricat.
Traiectoria miscarii este determinata de forma suprafetei prelucrate si se obtine prin compunerea miscarii principale cu una sau mai multe miscari simple de avans.
Miscarile simple de avans se clasifica dupa urmatoarele criterii:
- forma traiectoriei (rectilinie, circulara);
- directia miscarii de avans in raport cu axa sculei aschietoare, axa semifabricatului sau durata miscarii principale (longitudinal, transversal, radial, tangential);
caracterul miscarii (continua, periodica).
Structura lanturilor cinematice de avans tine seama de particularitatile si categoriile mentionate la clasificarea miscarilor, obtinandu-se:
lant cinematic de avans pentru miscarea rectilinie (cu avans continuu, cu avans periodic);
lant cinematic de avans pentru miscarea circulara (cu avans continuu, cu avans periodic);
La majoritatea masinilor-unelte sunt prevazute legaturi intre LCP si LCA sau legaturi intre diferite LCA
Pentru coordonarea precisa a doua miscari simple, de rotatie si de translatie, sunt necesare o serie de legaturi rigide intre lanturile cinematice de generare care sa asigure conditiile tehnico-economice de lucru (fig. 2.20).
Fig. 2.20. Structura LCA cu legatura rigida:
a - LC de filetare; b - LC pentru generarea suprafetelor conice;
M motorul electric de actionare; OP - mecanismul de pornire-oprire; I - mecanism
de inversare; CV - cutia de viteze; CA - cutia de avansuri; L1, L2 - punct de legatura;
AF / BF ,Ac / Bc - roti de schimb; SC, SC1, SC2 - surub conducator; Sf - semifabricat;
SA - scula aschietoare; SPS - suport port-scula; C - carucior; ST - sanie transversala;
A - miscarea principala de rotatie (caracterizata prin turatia n); B - miscarea de avans longitudinal (caracterizata prin avansul longitudinal fl); C - miscarea de avans transversal (caracterizata prin avansul transversal ft); n0 - turatia motorului electric de actionare; nsc - turatia surubului
conducator SC; n1, n2 - turatia surubului conducator SC1, respectiv SC2,
Daca raportul dintre vitezele sau turatiile miscarilor este constant, coordonarea se efectueaza prin roti de schimb (AF / BF - pentru lantul cinematic de filetare, respectiv Ac / Bc - pentru lantul cinematic de strunjire conica, fig. 2.20, b).
2. Mecanisme pentru reglarea in trepte a avansului
Pentru reglarea in trepte a avansului sau a vitezei de avans se utilizeaza, pe langa tipurile de mecanisme descrise la reglarea turatiei arborelui principal si o serie de mecanisme specifice prezentate in tabelul 2.7.
Tabelul 2.7 Mecanisme mecanice de actionare in trepte pentru reglarea avansului
|
Nr. crt. |
Denumirea mecanismului |
Descriere, caracteristici |
|
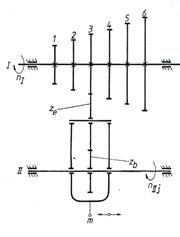
Mecanism cu roata basculanta (cutie Norton) |
Acest mecanism permite realizarea unui numar mai mare de turatii la arborele condus II, 6 . 12 trepte de avans, intr-un gabarit relativ redus. Este compus dintr-un numar de roti fixe (1, 2,.,6) plasate pe arborele conducator I si o roata baladoare Zb, care impreuna cu roata basculanta Ze sunt montate intr-o rama si cu ajutorul manetei m pot fi deplasate axial pe arborele II pana cand Ze angreneaza pe rand cu rotile fixe Zj (j = 1, 2,.,k) plasate pe arborele conducator.
Turatia la arborele condus va fi:
Mecanismul are o serie de dezavantaje: nu poate transmite puteri mari datorita rigiditatii reduse si tendintei de decuplare, deschiderea din corp necesara pentru comutarea bratului permite intrarea aschiilor si prafului in interiorul cutiei, puteri relativ mici etc. |
Tabelul 2.7 (continuare)
|
|
Mecanism tip meandru |
Roata conducatoare za este solidara cu arborele conducator I, mansoanele M1, M2 si M3 sunt libere fata de arborii I si II, iar roata zc este alunecatoare fata de arborele III. Sistemul de comutare este identic cu cel prezentat la mecanismul tip Norton.
Pentru tipul de mecanism prezentat se obtin urmatoarele patru rapoarte de transmitere:
adica, un
sir de rapoarte de transmisie care formeaza o progresie
geometrica cu ratia |
|
Mecanism cu roti cuplabile |
Mecanismul cu roti cuplabile prezinta o constructie compacta, cursele de cuplare fiind foarte mici. Comutarile de obtin prin cuplarea arborilor coaxiali.
|
Tabelul 2.7 (continuare)
|
Mecanism cu intermediara |
Elementul comutabil al mecanismului este roata intermediara zi, libera fata de arborele de intrare I.
Schema de realizare a comutarilor se poate realiza prin doua variante de cuplare: a) cuplare directa conform traseului:
arborele de intrare I - zi dr. - C - zI / b) sau cuplare intermediara: arborele de
intrare I - zi stg. - z3
/ |
3. Mecanisme pentru avans intermitent
In cazul proceselor de aschiere care se desfasoara ciclic, sunt necesare miscari de avans cu caracter intermitent. Aceste miscari se efectueaza in afara procesului de aschiere, intre doua cicluri consecutive, cum este cazul masinilor de rabotat, mortezat, rectificat etc.
Mecanismele de avans intermitent transforma miscarea continua a elementului conducator in miscare intermitenta a elementului condus, prin cuplare intr-un singur sens. Cele mai utilizate mecanisme de avans intermitent sunt mecanismele cu clichet (fig. 2.21).
Fig. 2.21. Mecanisme cu clichet - principiul de
functionare: S - suport pentru clichet; A - arborele condus; R - roata de clichet; C - clichetului; P - pana.
Suportul pentru clichet S este liber fata de arborele condus A, in timp ce roata dintata R (roata de clichet) este solidara cu arborele condus A. Datorita formei si pozitiei clichetului C, miscarea de oscilatie a elementului conducator se transmite unilateral (la oscilatia a2, clichetul se deplaseaza liber fata de roata R si deci se intrerupe miscarea elementului condus).
c
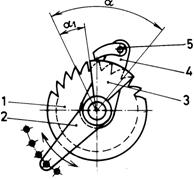
Fig. 2.22. Mecanisme cu clichet:
a - mecanism cu excentric
1 - disc de antrenare; 2 - culisa; 3 - biela; 4 - suport; 5 - roata de clichet; 6 - clichet; 7 - resort; 8 - tija;
b - mecanism de actionare cu cama solidara cu organul de lucru;
1 - roata de clichet; 2 - parghie; 3 - clichet; 4 - resort; 5 - surub de reglare; 6 - cama; 7 - organ de lucru;
c - reglarea avansului prin acoperirea dintilor din zona de oscilatie a clichetului
1 - roata de clichet; 2 - parghie; 3 - suport; 4 - brat; 5 - clichet.
In majoritatea cazurilor, mecanismele cu clichet sunt reglabile, permitind variatia marimii avansului intermitent. Sistemele folosite pentru reglarea avansului intermitent sunt prezentate in figura 2.22.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |