Mecanisme mecanice pentru realizarea miscarilor rectilinii - MASINI-UNELTE
Miscarile MU se pot efectua dupa traiectorii circulare (miscari de rotatie) sau rectilinii (miscari de translatie). Exista si traiectorii complexe (elice, evolventa etc.) dar acestea se obtin, in general, prin combinatii de miscari circulare si rectilinii.
Tabelul 2.8 Mecanisme mecanice pentru obtinerea miscarii rectilinii
|
Nr. crt. |
Denumirea mecanismului |
Descriere, caracteristici |
Mecanism cu roata dintata si cremaliera
Se utilizeaza doua variante constructive:
b
a prin solidarizarea ansamblului mobil 3 de cremaliera 2, lagarele rotii dintate 1 fiind fixe (mecanismul se utilizeaza la rabotezele longitudinale pentru obtinerea miscarii principale).
b prin solidarizarea ansamblului mobil 3 de lagarele rotii 1, cremaliera 2 fiind fixata la batiul MU 4 (mecanismul se utilizeaza la strungurile normale pentru avansul caruciorului).
Componenta: 1 - roata dintata; 2 - cremaliera; 3 - ansamblul mobil; 4 - batiu.
Avantaje: constructie simpla, transmite puteri mari fara vibratii, cursa de lucru mare etc.
Dezavantaje: neuniformitatea vitezei mai ales la valori mici si la punctele de intoarcere, frecventa redusa la inversare, necesita sistem de inversare a miscarii etc.
Mecanism cu surub conducator si piulita
Exista trei variante de obtinere a miscarii rectilinii:
a - surubul 1 se roteste si este blocat axial iar piulita 2 se deplaseaza axial fiind blocata la rotire (de exemplu surubul conducator al strungului normal);
b - surubul 1 se roteste si se deplaseaza axial, piulita 2 fiind complet blocata (de exemplu obtinerea avansului longitudinal la MU de frezat);
c - surubul 1 se deplaseaza axial si este blocat la rotire iar piulita 2 se roteste si este blocata axial.
De regula, elementul conducator se roteste, iar cel condus (legat la ansamblul mobil al MU) executa miscarea rectilinie.
Mecanismul este utilizat, de regula, pentru realizarea miscarilor de avans cu precizie foarte ridicata, la mecanismele auxiliare de reglare etc.
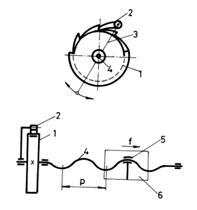
Mecanism cu surub melc si cremaliera
Mecanismul este similar cu cel cu roata dintata si cremaliera si poate realiza miscarile in aceleasi moduri.
Componenta: 1 - surub melc; 2 - cremaliera.
Mecanismul se utilizeaza mai rar pentru realizarea unor miscari rectilinii de lucru sau de avans, cu inversare rara.
Tabelul 2.8 (continuare)
|
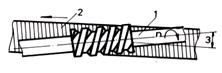
Mecanism cu clichet si surub conducator |
Mecanismul este utilizat la MU care necesita miscari intermitente cu o frecventa mare ca: avansul la MU de rabotat cu cap mobil, raboteze sau morteze, miscare de divizare la MU de danturat, miscari de comanda ale MU automate etc. Aceste mecanisme transmit miscarea intr-un singur sens.
Componenta: 1 - roata de clichet cu dinti de forma speciala; 2 - clichet; 3 - tija oscilanta (actionata mecanic sau hidraulic); 4 - surub conducator; 5 - piulita solidara cu organul de lucru 6 al MU. |
|
|
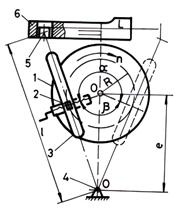
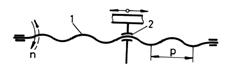
Mecanism cu culisa oscilanta |
Mecanismul este utilizat la MU de rabotat cu cap mobil (seping) unde realizeaza miscarea principala de aschiere rectilinie alternativa in plan orizontal.
Componenta: 1 - volant; 2 - piatra de culisa fixata pe volant la distanta R; 3 - parghie dubla (culisa) oscilanta; 4 - articulatie; 5 - extremitatea culisei oscilante; 6 - ansamblu mobil al MU; a unghiul corespunzator cursei active (de lucru); b unghiul corespunzator cursei de mers in gol (de retragere); L lungimea cursei elementului mobil (este in functie de R); e excentricitatea mecanismului; n rotatia volantului; l lungimea culisei oscilante. La o rotatie completa a volantului 1 avand piatra de culisa 2 fixata pe volant la distanta R, culisa 3 executa o oscilatie completa in jurul articulatiei 4 iar capatul 5 antreneaza ansamblul mobil al MU, care parcurge un drum egal cu L in fiecare sens, L fiind in functie de R care este reglabil. Cursa de lucru corespunde unghiului a, iar cea de revenire (mers in gol) unghiului b Viteza de mers in gol este mai mare decat viteza de lucru, fapt avantajos pentru exploatarea MU. |
Miscarile de rotatie se obtin direct, deoarece, marea majoritate a motoarelor de actionare (in general motoare electrice) realizeaza aceasta miscare in mod normal. Exista si motoare hidraulice cu piston sau motoare electrice liniare care dau direct o miscare rectilinie.
Pentru obtinerea miscarilor rectilinii din cele de rotatie sunt necesare mecanisme care sa realizeze aceasta transformare.
In general, la MU, miscarea rectilinie se obtine din cea de rotatie utilizand mecanisme mecanice pentru obtinerea miscarii rectilinii (tabelul 2.8).
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |