
Sisteme de timp utilizate in Geodezia cu Sateliti; Sisteme de referinta utilizate in Geodezia cu Sateliti;
3. Studiul orbitei satelitilor;
4. Metode de determinare a pozitiei pe baza obs. satelitare;
5. Utilizarea sistemului NAVSTAR-GPS in Geodezie;
6. Interpretarea si transformarea rezultatelor obs. satelitare;
7. Perspectivele utilizarii sistemelor satelitare in Geodezie.
Introducere /1
Geodezia
clasica : este stiinta care se ocupa cu studiul formei si dimensiunilor Pamantului.
moderna: + campul fizic asociat
+ tehnologiile moderne de investigare.
Dezavantajele Geodeziei clasice:
-Neomogenitatea det. coordonatelor (planimetrice fata de altimetrice);
-Sisteme de referinta negeocentrice (originea diferita de centrul de masa al Pamantului);
-Retelele de triangulatie realizate nu aveau acoperire globala;
-Impedimente specifice observatiilor optice (vizibilitate, geom. retelei, influente atmosferice s.a)
Geodezia cu Sateliti se ocupa cu studiul formei, dimensiunilor si a campului fizic ale Pamantului folosind in principal sateliti artificali ai Pamantului Este mai denumita uneori si Geodezie Spatiala avand in vedere ca se utilizeaza frecvent ca si masuratori, distante spatiale (statie-satelit) spre deosebire de distantele terestre (statie-statie) masurate in trilateratia clasica.
Satelitul artificial este un corp creat de stiinta si tehnologia umana, care este lansat pe o orbita in jurul unui corp ceresc si evolueaza pe aceasta orbita conform legilor mecanicii ceresti.
 Introducere /2
Introducere /2
Necesitatea conectarii ret. de triang
observatii optice de la sol asupra Lunii;obs. asupra unor tinte mobile (inalte);
-Markowitz camera lunara (fotografiere a pozitiei Lunii pe fondul stelelor)
-1942 Vaisala
fotografierea unor tinte (S) luminoase (parasute) lansate deasupra unei i
intinderi de apa (lac) din puncte intre care nuC
exista vizibilitate optica (A,C) (B,C);
-Scara retelei det. prin mas. de distante:
-terestre (AB): laser (terestru-AB), Doppler
-spatiale:
SLR-(ASi, BSi,CSi); interferometrie B
radar altimetrie, Doppler, pozitionare
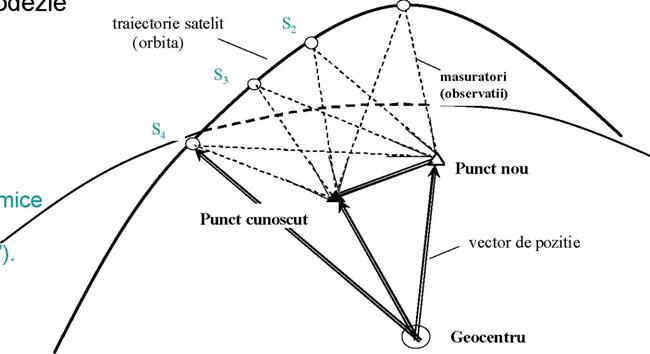
relativa (S1S2). Fig.1a Principiul determinarii
unei statii fotografice Fig.1b Principiul determinarii directiei intre doua
statii fotografice
Introducere/3
S1
 Metode de
utilizare a S.A. in Geodezie
Metode de
utilizare a S.A. in Geodezie
metode geometrice;
metode dinamice;
metode combinate sau semidinamice (short arc sau arc scurt, orbit relaxation sau relaxarea orbitei).
(S.A. sateliti artificiali)
![]() 1. Sisteme de timp
utilizate in G.S./1
1. Sisteme de timp
utilizate in G.S./1
1.1. Timp sideral
Timp universal: UT0; UT1, UT2
Timp sideral mediu Greenwich:
GMST = UT1 + am -12h(1.1.a)
UT1 -timp universal al meridianului Greenwich;
m -ascensia dreapta medie a Soarelui mijlociu (Sm);
GMST(notat uneori si cu o) -Timp Sideral Mijlociu Greenwich
![]()
 TU reprezinta
numarul de secole Juliene a cate 36.525 zile de timp universal scurse de la
miezul noptii Greenwich la 1 ianuarie ora 12 UT1 (JD 2.451.545,0) a anului
2000. GAST (notat si cu To) -Timp Sideral Aparent Greenwich
-reprezinta GMST corectat de efectele de nutatie.
TU reprezinta
numarul de secole Juliene a cate 36.525 zile de timp universal scurse de la
miezul noptii Greenwich la 1 ianuarie ora 12 UT1 (JD 2.451.545,0) a anului
2000. GAST (notat si cu To) -Timp Sideral Aparent Greenwich
-reprezinta GMST corectat de efectele de nutatie.
Timp sideral aparent Greenwich:
GAST = 1.0027379093UT1 + αm+ Δψ cosε (1.1.b)
Δψ -efectul nutatiei pe directialongitudinii;
cosε -efectul nutatiei pe directiaplanului eclipticii.
1. Sisteme de timp utilizate in G.S./2
1.2. Timp dinamic
TDB Timp Dinamic Baricentric
TDT Timp Dinamic Terestru
1.3. Timp Atomic
TAI Timp Atomic International:
TAI = TDT -32s.184 (1.3)
-unit. de masura: secunda SI (SistemInternational);
-Ziua in SI este definita ca avand 86400 de secunde SI, iar secolul Julian are 36525 de zile.
UTCTimpUniversalCoordonat
(Universal Time Coordinated)
| UT1 -UTC | < 0.9s. (Prin grija IERS )
dUT1 = UT1 UTC (1.4)
dAT = TAI UTC (1.5)
Exemple: UTC(USNO), UTC(RUS), UTC(AUS)
Timp GPS (Global Positioning System) -GPST
GPST a coincis cu UTC la ora 0 a datei de 06.01.1980

Saptamana GPS (GPS-WEEK): [1 ]
Ziua GPS (GPS-DAY): [1 365]
Secunda saptamanii GPS: [0 604800]s
Fig. Legatura intre diverse sisteme de timp
1.4 Calendarul. Epoci standard. Legatura intre epocile standard.
1.4.1 Calendarul Julian
a) Data iuliana (JD) -reprezinta numarul de zile solare medii trecute de la epoca 1.5 Ianuarie 4713 I.C. Un secol iulian are 36 525 zile iuliene; b) Data iuliana modificata (MJD) -este data iuliana din care s-a scazut un numar de zile: MJD = JD -2.400.000,5 zile (1.7)
MJD s-a adoptat deoarece numarul cifrelor cu care se lucreaza este mai mic, iar MJD incepe la miezul noptii (civile) in loc de pranz.
1.4.2 Calendarul Gregorian (civil) -este calendarulutilizat azipeplan mondialsiincepela anul4713 dupa calendarul iulian. Pentru diversele nevoi ale unor stiinte (Astronomie, Geodezie s.a.) s-au definit epocile standard, care constituie referinte de timp pentru calculul anumitor parametri. Un interes deosebit in Geodezia cu Sateliti il reprezinta epoca standard actuala si epoca standard GPS.
|
Data civila |
Data Iuliana |
Epoca standard |
Domeniu de aplicatie |
|
6.0 Ianuarie 1980 |
2 444 244.5 |
Epoca standard GPS |
Geodezia cu Sateliti |
|
1.5 Ianuarie 2000 |
2 451 545.0 |
Epoca standard actuala |
Astronomie |

Diferenta intre cele doua epoci standard exprimata in fractiuni de secol iulian va fi:
Aplicatie Conversii intre principalele sisteme de timp utilizate in Geodezia cu sateliti
1.5 Relatii de conversie a datei
a. Conversia datei civile in data Juliana:
JD = INT [365.25 y] + INT[30.6001(m+1)] + D + �+ UT/24 + 1.720.981,5 (1.9)
unde
INT -partea intreaga;
JD -data Juliana;
y = Y-1 si m = M+12daca M<=2;
y = Y sim = M daca M>2;
iar Y -anul ; M -luna din an; D -ziua, UT-ora din zi exprimata ca numar real
(Ex. 23.07.1995 ora 15:30: D=23, M=7, Y=1995, UT=15.3)
b. Conversia datei Juliene in data civila:
Se realizeaza in doua etape:
b.1. Calculul elementelor auxiliare
a = INT[JD+0.5];
b = a + 1537;
c = INT[(b-122.1)/365.25]; (1.10)
d = INT[365.25 c];
e = INT[(b-d)/30.6001].
Relatiile de mai jos au fost determinate [Montenbruck, 1984] pentru intervalul martie 1900 -februarie 2100.
b.2 Calculul datei civile
ziua: D = b-d-INT[30.6001e] + FRAC[JD+0.5];
luna: M = e-1-12INT[e/14] (1.11)
anul: Y = c-4715-INT[(7+M)/10]
unde FRAC -partea fractionara a unui numar;
Se poate calcula si ziua din saptamana (N) pe baza relatiei:
N = modulo (1.12)
unde
N=0 <> Duminica; N=1 <> Luni N=6 <> Sambata
Calculul saptamanii GPS (GPS WEEK):
GPS WEEK = INT[JD-2 444 244,5)/7] (1.13)
Secunda saptamanii GPS:
GPST = N*24*3600 + h*3600 + m*60 + s (1.14)
unde h-ora; m-minutul; s-secunda
2. Sisteme de referinta utilizate in G.S./1
2.1 Sisteme de referinta inertiale si
sisteme de referinta neinertiale
2.1.1 Sistemele de referinta inertiale
-originea: baricentru;
-sunt in repaos in raport cu Soarele;
-se supun mecanicii newtoniene;
-descrierea miscarii satel. cu orbite inalte.
2.1.2 Sistemele de referinta neinertiale
-originea: geocentru;
-sunt in repaos in raport cu Pamantul;
-se supun mecanicii relativiste;
-descrierea miscarii satel. cu orbite joase.
2.2 Descrierea miscarilor axei de rotatie a Pamantului
a. In sisteme de ref. inertiale (CCRS)
-Precesia; perioada (Chandler): ~430 zile
-Nutatia; perioada: ~ 1 zi;
-CEP -Celestial Ephemeris Pole
Pol Instantaneu Conventional;
-Pozitia sa se det. prin aplicarea (RP, RN
b. In sisteme de ref. neinertiale (CTRS)
-CTP(CIO) -Conventional Terrestrial Pole
Pol Terestru Conventional (Mediu);
-Pozitia sa se det. prin aplicarea (RS, RM
-Legatura intre CEP si CTP este data de coordonatele (xp,yp) ale CEP in raport cu CTP
2.3 Sisteme de referinta in Geodezia cu
Sateliti
2.3.1 Sistemul de referinta cvasi-inertial conventional -CCRS (Conventional Celestial Reference System)
Originea: geocentru (G);
Axa Z: axa de rot.a Pamantului la epoca J2000.0
Axa X:directia spre punctul vernal g.
Exemplu: ICRF sau IERS CRF (Intern. Earth Rotation Service Celestial Reference Frame)
2.3.2 Sistemul de referinta terestru Conventional -CTRS ( Conventional Terrestrial Reference System)
Originea: geocentru (G);
Axa Z: axa de rot.medie a Pamantului data de CTP (CIO)
Axa X:intersectia plan merid. Greenwich cu Ecuatorul terestru.
Exemplu: Realizari ale CTRS sunt denumite CTRF (CTR Frame) realizate pe baza unui set de puncte de referinta de la sol determinate prin obs. SLR (Satellite Laser Ranging) si VLBI (Very Long Baseline Interferometry);
 Sistemul WGS84
(World Geodetic System-1984)
Sistemul WGS84
(World Geodetic System-1984)
Este un sistem de referinta de tip CTRF definit pe baza a peste 1500 de puncte de referinta a caror precizie relativa este de ordinul a circa 1-2 m. Acest sistem de referinta geocentric are asociat un elipsoid echipotential definit de 4 parametri.
![]()
Elementele definitorii ale elipsoidului WGS-1984
![]()
Sistemul ITRF (IERS sau International Terrestrial Reference Frame)
Este un sistem de referinta neinertial definit pe baza a peste 180 de puncte de referinta in a caror pozitie se tine cont si de miscarea placilor tectonice.
ITRF este referit la o epoca YY (De exemplu: ITRF-89, ITRF-92, ITRF-94, ITRF-96, ITRF-97, ITRF-2000).
Precizia de determinare a acestor puncte este de cativa centimetri. Ca metode de determinare se folosesc observatii de tip SLR, VLBI si GPS. Pe baza realizarilor succesive la diferite epoci ale acestui sistem de referinta sunt determinate cu precizie ridicata si vitezele de deplasare.
Transformarea coordonatelor intre sistemul WGS-84 si sistemele ITRF-YY se face in general pe baza unei transformari conforme de 7 parametri (3 translatii, 3 rotatii si un factor de scara). Cei 7 parametri de transformare sunt publicati la fiecare realizare a unui nou sistem ITRF-YY de catre servicii specializate cum este IGS (International GPS Service for Geodynamics).
 2.3.3
Transf. coord. din sistem CCRS in CTRF
2.3.3
Transf. coord. din sistem CCRS in CTRF
RM -matricea de rotatie datorata miscarii Polului;
RS -matricea de rotatie datorata timpului sideral
(axele X ale celor doua sisteme);
RN -matricea de rotatie datorata nutatiei;
 RP -matricea de rotatie datorata
precesiei.
RP -matricea de rotatie datorata
precesiei.
RS =
RM = R2(-xP)R1(-yP
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |