MASINA ASINCRONA - REGIMURI DE FUNCTIONARE SI MODALITATI DE REGLARE A TURATIEI
Regimuri de functionare
Infasurarea statorica ,care reprezinta un receptor trifazat echilibrat,este alimentata cu un sistem de tensiuni trifazat si simetric ,de succesiune directa,stabilindu-se un system de curenti ,trifazat simetric de aceeasi succesiune directa.In aceste conditii statorul (inductorul) creeaza un camp magnetic invartitor,a carui armonica fundamentala se roteste cu turatia n1 fata de stator (denumita turatie de sincronism).
Infasurarea rotorica este o infasurare inchisa (atat la rotorul bobinat cat si la cel in colivie) si are acelasi numar de perechi de poli p pe o faza ca si statorul.Cand rotorul sta pe loc,campul magnetic invartitor statoric intalneste pe rand bobinele (fazele ) rotorice ,inducand in acestea tensiuni electromotoare care determina in infasurarea rotorica inchisa un sistem trifazat simetric de curenti.Deci conductoarele (barele) rotorice sunt parcurse de curenti electrici si situate in camp magnetic,asupra lor exercitandu-se forte de tip Laplace,care pun in miscare rotorul,acesta miscandu-se cu turatia n fata de stator in sensul campului magnetic invartitor. Turatia rotorului este mai mica decat cea de sincronism ,adica n<n1,caci numai asa exista o miscare relativa a rotorului fata de de campul invartitor statoric si deci un fenomen de inductie electromagnetica pe baza caruia se induc t.e.m. si curentii in rotor.
Frecventa tensiunilor electromotoare induse in rotor (deci si a curentilor rotorici) este f2 ea fiind determinata de turatia relativa a campului magnetic invartitor fata de rotor (n1-n).Astfel se poate scrie:
![]()
Unde:
![]()
Se numeste alunecarea motorului sincron.
Dupa valorile alunecarii ,se pot defini cele trei regimuri de functionare ale masinii asincrone:
Regimul motor ,cand 0< n< n1 rezultand 1> s> 0
Regimul de generator , cand n> n1 masina e antrenata din exterior de un motor primar ,deci s<0
Regimul de frana,cand n<0 ,rotorul e obligat sa se roteasca
Invers fata de sensul determinat de cuplul motorului,s>1
In fig.1 este prezentata dependenta M=f(s),distingandu-se cele trei regimuri de functionare: generator (s <0),motor (0< s <1) si frana (s>1)
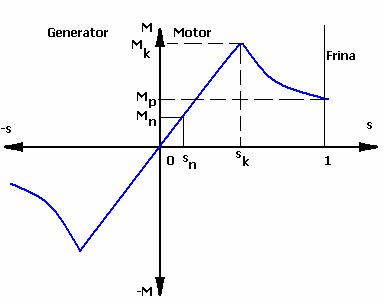
Fig . 1
Referindu-ne la regimul de motor ,prezinta importanta coeficientii de multiplicare kp a cuplului de pornire Mp (adica la s=1) definit ca raportul:
![]()
Si de supraincarcare :
![]()
Mn fiind cuplul nominal.
Din caracteristica M=f(s) ,pentru functionare ca motor
Fig.2 ,rezulta ca ca portiunea 0< s< sk este o portiune
stabila,cata vreme pentru sk
<s< 1 este
nestabila.Daca punctul de functionare ar fi in B ,atunci la o
crestere a cuplului rezistent de la Mr la Mr scade n,creste s ( ![]() ) ,scade M,scade mai mult n,creste s,scade M,etc. pana ce
motorul se opeste.La o micsorare a lui Mr pana la Mr
,creste n,scade s,creste M, creste mai
mult n,scade s,creste M,pana se
ajunge la M=Mk,dupa
care scade pana devine egal cu Mr
in puctul A.
) ,scade M,scade mai mult n,creste s,scade M,etc. pana ce
motorul se opeste.La o micsorare a lui Mr pana la Mr
,creste n,scade s,creste M, creste mai
mult n,scade s,creste M,pana se
ajunge la M=Mk,dupa
care scade pana devine egal cu Mr
in puctul A.
Daca punctul de functionare este in A,la cresterea lui Mr ,scade n,creste s,creste M si egaleaza pe Mr in punctual A (un alt punct stabil).La scaderea lui Mr pana la Mr noul punct stabil va fi A.
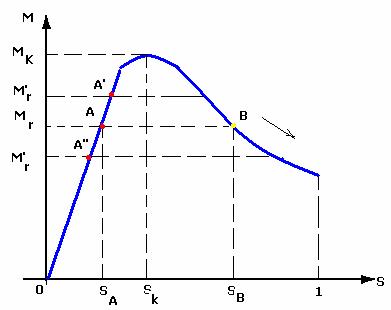
Fig. 2
Modalitati de reglare a turatiei motorului asincron trifazat
Datorita avantajelor constructive si de exploatare pe care le prezinta motorul asincron fata de celelalte motoare, in ultimii ani s-au facut ample cercetari privind reglarea vitezei acestora. Unele metode, devenite clasice, sunt in curs de extindere deoarece asigura indici de calitate comparabili cu cei ai actionarilor cu motoare de curent continuu.
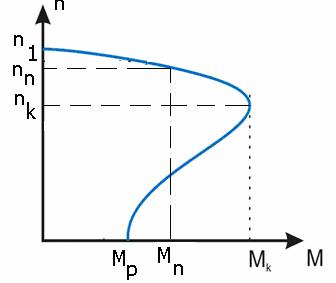
Motorul asincron are o caracteristica mecanica n=f(M) dura (rigida),adica turatia variaza putin cu sarcina la arbore (cu M) asa cum rezulta din Fig.3. Viteza maxima, de sincronism, este impusa de frecventa tensiunii de alimentare a rotorului f1. Avand in vedere doar aceste aspecte putem sa spunem ca sistemele de reglare a turatiei pentru motoarele asincrone vor fi cu mult mai complexe decat cele ale motoarelor de curent continuu.
Din acest motiv motorul asincron este utilizat
in general in actionari electromecanice care functioneaza
la turatie relativ
 Unde
Unde
(n1,cuplul nul) =punctual de mers in gol
(nn,Mn)=punct nominal
(nk,Mk)=punct critic
Fig. 3
Totusi apare deseori necesitatea modificarii (reglarii) turatiei motorului asincron trifazat intre anumite limite,la cuplu rezistent Ms constant.Unele posibilitati de reglare a turatiei motorului asincron trifazat rezulta din expresia alunecarii :
![]()
Din aceasta relatie rezulta ca ca reglarea turatiei este posibila actionand asupra unuia din cei trei parametri:
In functie de costructia rotorului putem vorbi despre:
a) metode specifice motoarelor asincrone cu rotorul in scurtcircuit, la care comanda se face in stator:
modificarea frecventei tensiunii de alimentare a statorului;
modificarea amplitudinii tensiunii de alimentare a statorului;
modificarea simultana si corelata a amplitudinii si frecventei tensiunii de alimentare a statorului;
modificarea numarului de perechi de poli
modificarea impedantei statorice;
b) metode specifice motoarelor asincrone cu rotorul bobinat, la care comanda se face in rotor:
modificarea impedantei circuitului rotoric;
introducerea unei tensiuni auxiliare in circuitul rotoric.
A. Modificarea frecventei tensiunii de alimentare a statorului;
Modificarea turatiei prin intermediul lui f1 rezulta din caracteristicile mecanice artificiale reprezentate mai jos pentru doua frecvente diferite de cea nominala (caracteristica naturala).Se vede ca la acelasi cuplu rezistent la arbore turatiile sunt diferite pentru frecvente diferite.
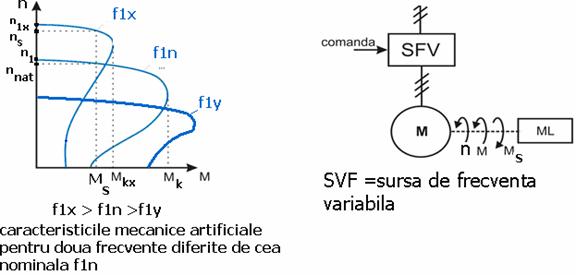
Fig. 3
Unde :
Ms este cuplul rezistent la arborele motorului
ns este turatia impusa de procesul tehnologic
nnat este turatia la care ar functiona actionarea pe caracteristica mecanica naturala a motorului
Daca ns > nnat , reglarea vitezei se face prin alimentare cu frecventa f1x >f1n.
Din ipoteza ca cele doua caracteristici mecanice sunt paralele intre ele, se pot scrie rapoartele:
![]()
In final rezulta:
![]()
Daca ns < nnat atunci f1x < f1n . Deoarece reducerea frecventei determina saturarea masinii, este necesara reducerea simultana si a tensiunii de alimentare, reglarea vitezei facandu-se pe caracteristici combinate de tensiune si frecventa.
In acest caz este utilizat un convertor static de frecventa (un cicloconvertor sau un invertor de tensiune sau de curent). Pentru a pastra nealterate performantele motorului (cuplu dezvoltat, curent maxim impus) fluxul magnetic din masina trebuie sa fie mentinut, pe cat posibil, constant. Acest lucru impune si modificarea amplitudinii tensiunii de alimentare in corelatie cu variatia frecventei acesteia.Alimentarea motorului asincron tinde sa fie facuta in general de la convertoare statice de frecventa, care pot realiza modificarea atat a amplitudinii cat si a frecventei tensiunii de alimentare (aceasta si datorita complexitatii crescute a algoritmilor de reglare).
Ceea mai utilizata structura de alimentare este formata dintr-un redresor necomandat si un invertor cu modulatie in latime a impulsurilor, numit si invertor P.W.M., figura 4. Acesta este construit de obicei cu tranzistoare MOS de putere.
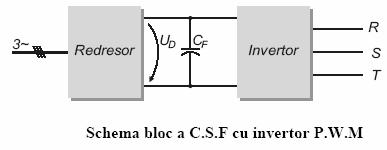
Fig. 4
Elementele esentiale ce trebuie avute in vedere la proiectarea invertoarelor P.W.M., numite in acest caz si invertoare de curent, sunt: necesitatea asigurarii unei rezerve de tensiune care sa permita impunerea unor valori dorite ale amplitudinii curentilor prin motor (acest aspect apare in special la viteze mari, si se elimina prin asigurarea unei tensiuni de alimentare de curent continuu suficiente pentru aplicatia dorita) si frecventa de comutatie care, pentru a asigura performante bune trebuie sa fie cat mai mare, dar care trebuie sa fie totusi mai mica decat frecventa maxima de lucru a dispozitivelor semiconductoare folosite.
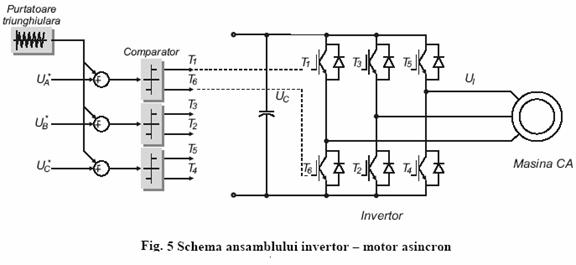
Modularea in durata a impulsurilor (P.W.M.) este procedeul prin care intervalele de conductie ale contactelor se fragmenteaza in vederea obtinerii unui continut favorabil de armonici ale tensiunii de iesire a invertorului. In acelasi timp se obtin performante dinamice ridicate. Impulsurile de tensiune modulate in durata, dupa o lege sinusoidala, se obtin prin compararea unui sistem trifazat de tensiuni sinusoidale (semnalul modulator) cu un semnal de tensiune triunghiular (semnalul purtator). Cele trei tensiuni sinusoidale sunt defazate intre ele cu un unghi de 120°. Frecventa f1, a semnalului modulator este egala cu frecventa armonicii fundamentale a tensiunii de iesire din invertor. Frecventa semnalului purtator triunghiular ft trebuie sa fie mai mare decat f1, de cel putin doua ori. Calitatea formei de unda a tensiunii de iesire este cu atat mai buna cu cat frecventa ft este mai mare.
Atat amplitudinea, cat si frecventa tensiunii de iesire, sunt reglate din comanda invertorului. Acesta este principalul dezavantaj al C.S.F. cu invertoare P.W.M. (schema de comanda a invertorului este mai complicata). Pentru a inlatura acest dezavantaj s-au realizat circuite integrate specializate pentru comanda de tip P.W.M. In acelasi timp s-au dezvoltat si tehnici de comanda numerica (P.W.M. digital).
Schema principiala de comanda a unui invertor este prezentata in figura 5. Partea de forta este formata dintr-un invertor trifazat cu tranzistoare. Acesta este alimentat de la o tensiune continua Uc si este comandat pe principiul modularii in latime a impulsurilor utilizandu-se:
semnal triunghiular de referinta (semnal purtator) de frecventa 10 kHz;
semnal modulator trifazat sinusoidal: Ua*, Ub*, Uc*. In aceasta situatie frecventa si amplitudinea sunt constante. Intr-un sistem de reglare insa aceste marimi sunt impuse de partea de comanda.
Semnalul modulator este comparat cu semnalul triunghiular, la iesirea comparatoarelor Ca, Cb, Cc obtinandu-se impulsurile de comanda pe baza pentru cele sase tranzistoare. In practica aceste impulsuri sunt aplicate unor circuite special concepute in acest sens numite dispozitive de comanda pe grila.
B.Modificarea turatiei prin modificarea numarului de perechi de poli
Se poate aplica numai la motoarele construite special in acest scop, fiind denumite si motoare cu doua sau mai multe turatii.Asemenea motoare au in stator una sau mai multe infasurari distincte.In cazul unei singure infasurari aceasta este cu prize mediane,astfel incat pe fiecare faza apar doua semibobine (AX* si A*X) ce pot fi legate in diverse modalitati,realizand diferite numere de poli (2p) asa cum rezulta din figura 6 de mai jos.
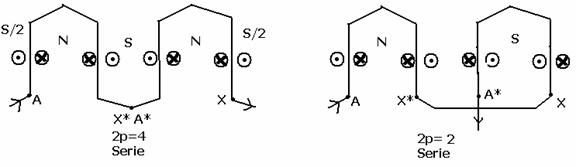
Fig. 6
Toate cele patru borne (A,X*,A*,X) ale unei faze statorice trebuie sa fie scoase la cutia cu borne iar conexiunile corespunzatoare se realizeaza cu un comutator .Caracteristici mecanice artificiale pentru p1=4 si p2=2 sunt prezentate calitativ in figura de mai jos Fig. 7,unde rezulta ca la acelasi cuplu cuplu rezistent MS se obtin turatii diferite la numar de perechi de poli diferit (punctele de functionare A si B).
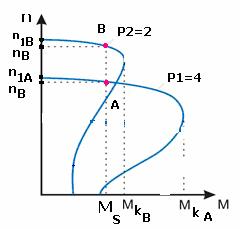
Fig. 7
C. Modificarea amplitudinii tensiunii de alimentare a statorului
O alta metoda de reglare a turatiei consta in modificarea tensiunii de alimentare,aceasta posibilitate rezulta din caracteristicile mecanice artificiale n=f(M) cand parametrul este U1 .Asemenea caracteristici pentru trei tensiuni (U1n>U1> U1) sunt prezentate calitativ in figura de mai jos Fig 8.De aici rezulta ca la acelasi cuplu rezistent Ms se obtin turatii diferite (ns>n>n) la tensiuni de alimentare diferite.
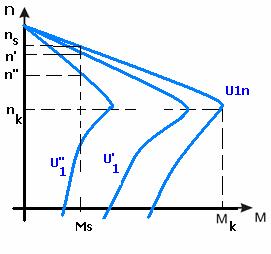
De remarcat ca
Tensiunea U1< U1n ceea ce face n<ns dar tot timpul mai mare ca nk.Acest procedeu de aplica rar ,fiind neeconomic.
Fig. 8
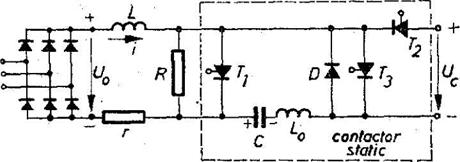
D. Reglarea vitezei motorului asincron cu rotor bobinat printr-o rezistenta rotorica variabila cu ajutorul unui contactor static
Un procedeu de reglare a turatiei ce se poate aplica numai motoarelor asincrone cu rotorul bobinat,consta in introducerea de rezistente in serie cu fazele rotorului.
Utilizarea tiristoarelor sau tranzistoarelor de putere permite variatia rezistentei aparente a unui rezistor intercalat in circuitul rotoric a unui motor asincron trifazat. Pentru a intelege principiul obtinerii unei rezistente variabile pe cale electronica, vom utiliza schema din fig. 9
|
|
|
Fig. 9 Schema electrica a unui contactor static pentru suntarea unei rezistente |
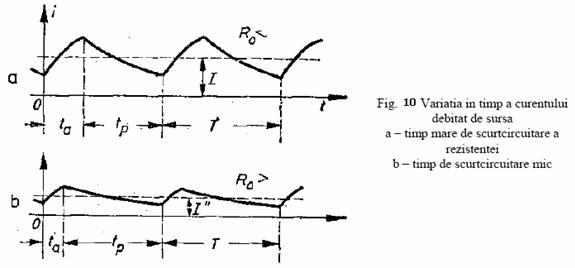
De la o sursa de c.c. U0 se alimenteaza rezistorul R prin intermediul unei bobine L si a unui rezistor aditional r. In paralel cu R se afla tiristorul T1 cu stingere fortata. Pentru stingere se utilizeaza un ansamblu format dintr-un grup LC, tiristoarele T2 si T3, dioda D alimentate de la o sursa auxiliara Uc. Schema functioneaza in modul: se da impuls de aprindere simultan tiristoarelor T1 si T2. T1 scurtcircuiteaza rezistenta R, curentul principal i crescand exponential cu constanta de timp L/Q. (fig. 10). In acelasi timp tiristoarele T1 si T2 conecteaza condensatorul la sursa auxiliara de tensiune Uc ct.; cand curentul de incarcare limitat de inductanta L0, dupa ce a atins un maxim, se anuleaza, atunci tiristorul T2 se blocheaza si separa sursa Uc, tensiunea la bornele condensatorului fiind acum 2Uc, cu polaritatea din fig. 9; tiristorul T1 ramane in conductie datorita curentului principal i. Incarcarea condensatorului dureaza un timp foarte scurt comparat cu timpul minim calculat de conductie al tiristorlui T1. Dupa ce tiristorul T1 a condus pe intervalul ta (fig. 10), se da impuls de aprindere tiristorului T3. Condensatorul C se descarca pe calea T1, T3, L0, C pana cand curentul prin tiristorul T1 se anuleaza si tiristorul T1 se blocheaza, curentul principal fiind preluat de rezistenta R, scazand exponential cu constanta de timp L/(R + r). Condensatorul isi continua descarcarea prin R si tiristorul T3 pana cand curentul de descarcare se anuleaza, in care caz T3 se blocheaza, iar polaritatea condensatorului se schimba. Curentul prin condensator poate continua in sens invers prin dioda D, pana cand se anuleaza din nou, in care caz condensatorul revine la polaritatea din fig. 9. Dupa un interval de timp tp, se da din nou comanda de
aprindere a tiristorului
T1 (respectiv T2) si fenomenele se repeta. Perioada T = ta
+ tp a variatiei curentului prin circuit este
Curentul i variaza periodic (cu perioada T) conform fig. 10. Raportul dintre U0 si curentul mediu I pe o perioada da rezistenta aparenta R0 a circuitului. Cand ta este practic nul, adica tiristorul nu scurtcircuiteaza practic rezistenta R, atunci rezistenta aparenta este R0 = R + r. Daca ta are valoarea T, atunci R este permanent scurtcircuitata si R0 = r.
Valoarea lui R0 depinde de variabila ta/T = a cu valori cuprinse intre 0 si 1. Variatia lui R0 este deci continua intre limitele r si r + R0 astfel de variatie pe cale electronica a unei rezistente poate fi utilizata la pornirea sau reglarea vitezei unui motor asincron cu rotor bobinat conform fig. 11.
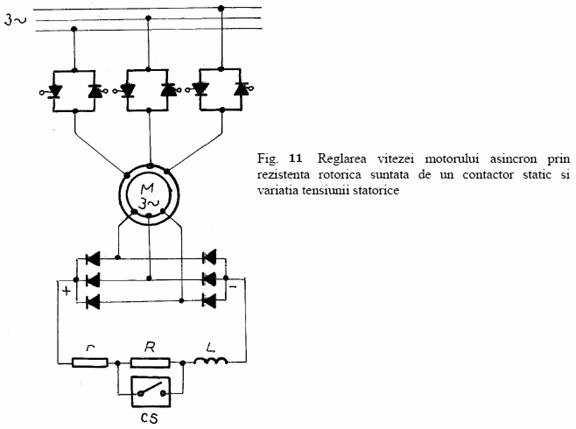
Cele trei faze rotorice sunt conectate la un redresor trifazat in punte, la iesirea careia se leaga rezistenta R suntata periodic de un contactor static, de tipul celui descris mai sus si elementele aditionale L si r. In fig. 11 se arata si un sistem de reglare a tensiunii statorice prin intermediul a doua tiristoare montate in opozitie (sau a unui triac) pe fiecare faza statorica. Pe o faza oarecare in tiristor conduce curentul de faza intr-un
sens, iar cel din opozitie conduce curentul cand acesta este in sens invers. Actionand asupra unghiului de intarziere la aprindere a tiristoarelor, este posibil a se modifica amplitudinea tensiunii fundamentale de baza a motorului. Caracteristicile combinate ce se pot realiza cu schema din fig. 11 sunt prezentate in fig. 12.
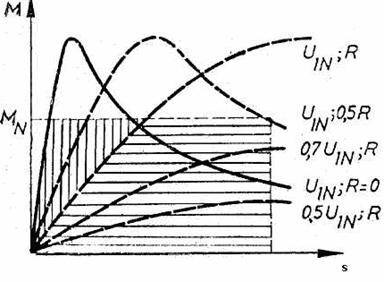
Fig. 12 Caracteristicile mecanice pentru instalatia din fig. 11
Pentru U1 = U1n si R variabil se obtin caracteristicile din zona hasurata vertical. Pentru U1 variabil si rezistenta R maxima se capata familia de caracteristici din zona hasurata orizontal.Masina poate functiona in orice punct din zona hasurata.
Bibliografie selectiva
1. D. Alexa, O. Hrubaru, Aplicatii ale convertoarelor statice de putere, Editura Tehnica, Bucuresti, 1989
2. C.Nitu, I. Matlac ,Echipamente electrice si electronice de automatizare,Editura Didactica si Pedagogica ,Bucuresti 1980
3. D.Caluleanu,Electrotehnica si masini electrice, Editura Didactica si Pedagogica ,Bucuresti 1983
4. I. Zaharia ,Masini electrice navale,Editura EXPONTO ,Constanta ,2001
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |