
SISTEME NECONVENTIONALE SPECIFICE DE REGLARE AUTOMATA
1.1. Sisteme conventionale si sisteme neconventionale de reglare automata
Prin sistem de reglare conventionala SRC, sau bucla simpla de reglare automata, se intelege un sistem de reglare pentru instalatii cu o singura marime de comanda si o singura marime masurata la care singura informatie despre indeplinirea scopului conducerii o constituie eroarea sistemului.Aceasta informatie inseamna atat valoarea erorii cat si eventual atribute ale sale ca si functie in timp ca de exemplu derivate si integrale de diferite ordine realizate prin legile de tip PID.
1.2. Sisteme de reglare in cascada
1.2.1. Definitia sistemelor de reglare in cascada
Prin sistem de reglare in cascada se intelege un sistem la care se regleaza prin bucle concentrice o serie de marimi intermediare care raspund mai repede la perturbatii decat marimea de iesire finala ce trebuie controlata.Prin aceste bucle concentrice se previne intr-o mare masura actiunea perturbatiilor asupra marimii de iesire.
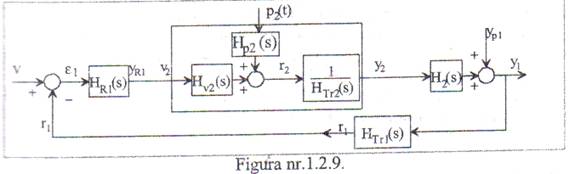
Structura unui sistem de reglare in cascada cu doua bucle este prezentata in Fig. 1.2.1. Ea se poate extinde pentru un numar oarecare de bucle, in functie de numarul de marimi intermediare ale procesului condus necesare unui scop.
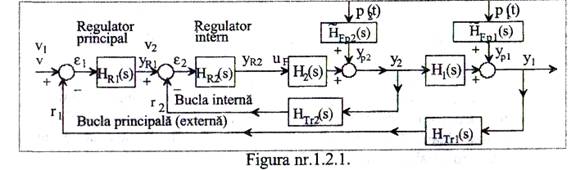
Marimea de iesire este y1, iar y2 este o marime intermediara. Fiecare este prevazuta cu traductoare corespunzatoare. Elementul de executie si instalatia tehnologica sunt exprimate ca o conexiune serie de doua elemente, H1(s) si H2(s) intre care intervin si diferitele perturbatii.Regulatorul principal are functia de transfer HR1(s) iar cel intern HR2(s).
Intr-un sistem de reglare in cascada, marimea de comanda dintr-o bucla este marime prescrisa pentru bucla imediat interioara.Bucla externa se numeste si bucla principala iar regulatorul din aceasta bucla se numeste regulator principal.
1.2.4. Calculul sistemelor de reglare in cascada
Consideram structura in cascada cu doua bucle din Fig. 1.2.1. in care se noteaza pentru simplitatea scrierilor ulterioare,
![]()
Extensiile la structurile cu mai multe bucle se pot face dupa aceleasi proceduri. Marimea de iesire din bucla interioara, care este marimea intermediara y2, si care este o marime fizica specifica fiecarui proces, depinde de v2 si p2,
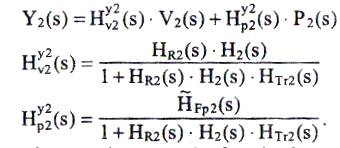
Se exprima marimea y2, in functie de marimea de reactie r2 care este iesirea din traductorul acestei bucle,
![]()
Se interpreteaza marimea de reactie r2 ca fiind iesirea unui sistem de reglare cu reactie directa, corespunzator structurii standard utlizata in procedurile de proiectare, unde
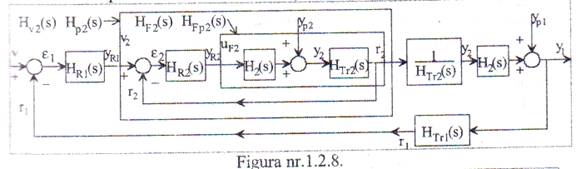
![]()

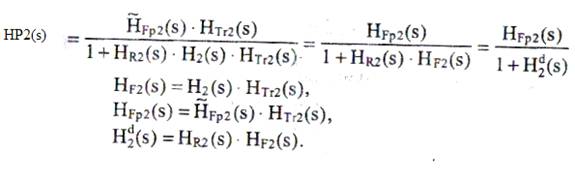
Carora le corespund schemele bloc din Fig 1.2.8 si Fig. 1.2.9
Sub2
1.3. Sisteme de reglare combinata
1.3.1. Definitia sistemelor de reglare combinata
Sunt sisteme in care se imbina principiul actiunii prin discordanta cu principiul compensatiei.Conform principiului actiunii prin discordanta, intai marimea reglata se abate de la valoarea prescrisa, nu are importanta ce perturbatie a produs abaterea, si apoi se reactioneaza pentru compensarea acestei abateri.
1.3.2. Sisteme de reglare combinata avand corectia suplimentara aplicata la iesirea din legea de reglare
Un sistem de reglare combinata avand corectiile suplimentare aplicate iesirea din legea de reglare si deci la intrarea elementului de executie, in functie numai de valoarea perturbatiei pk,este prezentat in figura 1.3.10
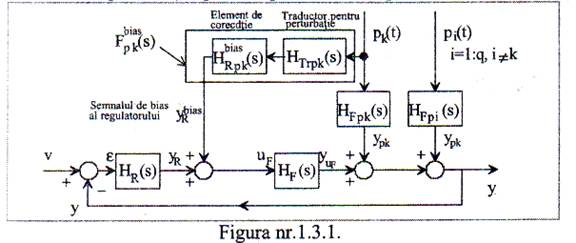
Corectia suplimentara se realizeaza prin semnalul
![]()
unde Fpk(s) este filtrul de corectie
![]()
in care ![]() este functia de
transfer a elementului de corectie iar HTrpk(s) este functia de transfer a
traductorului prin care se masoara perturbatia pk.
este functia de
transfer a elementului de corectie iar HTrpk(s) este functia de transfer a
traductorului prin care se masoara perturbatia pk.
Raspunsul format al sistemului in circuit inchis, prevazut cu aceasta corectie suplimenatara este:
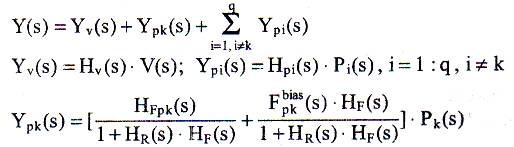
Componenta ypk(t) a marimii de iesire, provocata de variatia perturbatiei pk(t), este nula daca:
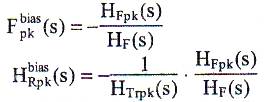
Se observa ca in aceasta structura, filtrul de corectie nu depinde de legea de reglare fiind acelasi in circuit deschis si inchis.
Sub3
1.4. Sisteme de reglare convergenta
1.4.1. Definitia sistemelor de reglare convergenta
Reglarea convergenta se aplica la procese cu o singura marime de comanda si o singura marime reglata la care sunt disponibile o serie de marimi intermediare, fiecare prevazute cu traductoare adecvate.Sistemul este prevazut cu o bucla principala de reglare, avand o lege de reglare principala HR1(s).
In reglarea convergenta se aplica corectii suplimentare, dependente de marimile intermediare, concentrate intr-un singur punct.
Structura de reglare convergenta este o varianta de sistem de reglare cu mai multe bucle MLCS (Multy Loop Control System).
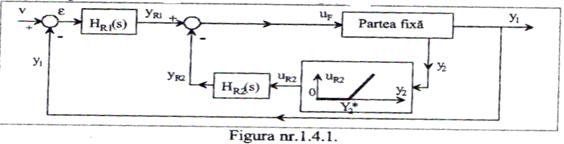
1.4.2. Sisteme de reglare convergenta avand corectia suplimentara aplicata la iesirea din legea de reglare
Un exemplu de sistem cu o singura
bucla de corectie este prezentat in Fig. 1.4.1. ce contine o neliniaritate de
tip zona moarta.Daca marimea intermediara este mai mica decat o valoare
predefinita ![]() , y2<
, y2< ![]() ,atunci yR2(t) -> 0 bucla de corectie suplimentara tinde
sa nu afecteze comportarea sistemului de reglare principal care realizeaza
anumite performante initiale sau principale.
,atunci yR2(t) -> 0 bucla de corectie suplimentara tinde
sa nu afecteze comportarea sistemului de reglare principal care realizeaza
anumite performante initiale sau principale.
Peste aceasta limita, y2>![]() ,
,![]() yR2(t)
yR2(t)![]() 0, bucla suplimentara este activa si se realizeaza alte
performante.
0, bucla suplimentara este activa si se realizeaza alte
performante.
Trebuie analizata cu grija
comportarea sistemului la limita de comutare y2 =![]() .
.
Se poale declansa o miscare oscilanta in jurul acestui punct, denumit fenomen de 'agatare', in unele aplicatii benefic in altele trebuind evitat sau asigurate proceduri de iesire din regimul de agatare.
1.4.3. Sisteme de reglare convergenta avand corectia suplimentara aplicata la intrarea in legea de reglare
Structura anterioara dar cu corectie la intrarea in legea de reglare principala este prezentata in Fig. 1.4.2
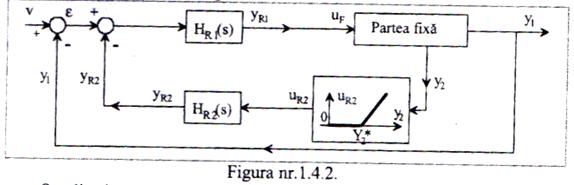
0 aplicatie des folosita a
acestei structuri se intalneste la reglarea vitezei de rotatie a unor motoare
electrice, in care y1,este viteza de rotatie si y2 este curentuul rotoric. Daca y2< ![]() , se pot asigura
performante superioare pentru viteza de rotatie. Cand y2>
, se pot asigura
performante superioare pentru viteza de rotatie. Cand y2> ![]() ,prin bucla suplimentara se limiteaza valoarea curentului,
chiar daca pentru viteza de rotatie scad performantele,dar sistemul nu se
opreste si poate reveni singur la structura initiala.
,prin bucla suplimentara se limiteaza valoarea curentului,
chiar daca pentru viteza de rotatie scad performantele,dar sistemul nu se
opreste si poate reveni singur la structura initiala.
1.5 Sisteme de reglare paralela
1.5.1. Definitia sistemelor de reglare paralela
Sistemele de reglare paralela sunt sisteme in care o aceeasi marime de executie este controlata de bucle de reglare separate care nu opereaza in acelasi timp.
Reglarea paralela se aplica la procese cu mai multe marimi ce trebuiesc reglate dar folosind o unica marime de comanda. Pentru fiecare marime reglata este prevazuta bucla de reglare specifica, cu marimea prescrisa corespunzatoare.
1.5.2. Sistem de reglare paralela cu doua bucle
In Fig. 1.5.1.a. este prezentata o structura de reglare paralela cu doua bucle.
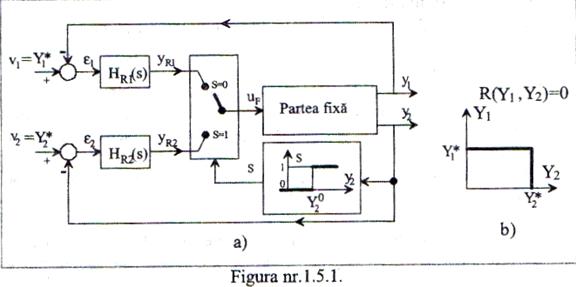
Partea fixa a sistemului are doua
marimi de iesire, y1, y2, ce reprezinta marimile de iesire din traductoarele a
doua marimi fizice, si o singura marime de comanda ![]() , intrarea in
elementul de executie.
, intrarea in
elementul de executie.
Starea care dirijeaza circuitul de comutatie,in acest exemplu depinde numai de marimea y2 este data de relatia,
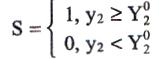
astfel ca daca y2<![]() se conecteaza bucla y1,iar daca y2>
se conecteaza bucla y1,iar daca y2>![]() se conecteaza bucla y2 .
se conecteaza bucla y2 .
Presupunem ca ambele bucle asigura eroare stationara de pozitie nula. In regim stationar acest sistem realizeaza relatia din Fig. 1.5.1 .b.,
date de marimile prescrise, evident cu conditia
![]()
Implementarea acestei structuri presupune asigurarea conditiilor de comutare fara socuri la elementul de executie.
Sub4
1.8. Sisteme de reglare cu structura variabila
1.8.1. Definitia sistemelor cu structura variabila
Sistemele de reglare cu structura variabila (SRSV) sunt sisteme in care parametrii sistemului (parametrii legii de reglare si ai partii fixe) si/sau relatiile de conexiune se modifica in salt in functie de starea sistemului, care include starea regulatorului si a partii fixe, sau in functie de caracteristicile unor marimi de intrare (marimea prescrisa sau perturbatii).In acest context, valorile parametrilor si relatiile de conexiune existente la un moment dat, definesc o structura.
1.8.2. Exemplu de sistem cu structura variabila
Se stie ca in general, intr-un
sistem liniar, daca factorul de proportionalitate al legii de reglare ![]() are valoare mica,
are valoare mica, ![]() =
=![]() ,atunci polii functiei de transfer pot fi reali si raspunsul
sistemului este aperiodic, fara suprareglaj asa cum este ilustrat in Fig.1.8.1.
Acesta este un avantaj dar din pacate raspunsul este prea lent ceea ce inseamna
un dezavantaj in special cand eroarea sistemului este mare.
,atunci polii functiei de transfer pot fi reali si raspunsul
sistemului este aperiodic, fara suprareglaj asa cum este ilustrat in Fig.1.8.1.
Acesta este un avantaj dar din pacate raspunsul este prea lent ceea ce inseamna
un dezavantaj in special cand eroarea sistemului este mare.
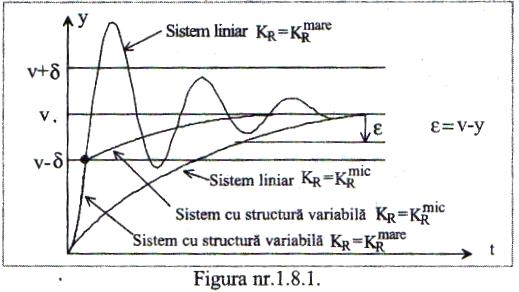
Daca in schimb factorul de proportionalitate ![]() are valoare mare
are valoare mare ![]() =
=![]() , polii pot fi complex conjugati si raspunsul este oscilant
amortizat cu un suprareglaj mare, ceea ce este un dezavantaj dar raspunsul este
rapid ceea ce inseamna un avantaj mare.
, polii pot fi complex conjugati si raspunsul este oscilant
amortizat cu un suprareglaj mare, ceea ce este un dezavantaj dar raspunsul este
rapid ceea ce inseamna un avantaj mare.
Deci prin cele doua valori ale
parametrului ![]() s-au definit doua
structuri S
s-au definit doua
structuri S
S=S1 ![]()
![]() =
=![]()
S=S2 ![]()
![]() =
=![]()
Se poate concepe un sistem care
sa preia avantajele de la fiecare structura, in acest scop se masoara eroarea
sistemului si daca aceasta are o valoare in modul peste o anumita limita se
seteaza ![]() =
=![]() si daca eroarea este mica in modul se seteaza
si daca eroarea este mica in modul se seteaza ![]() =
=![]() .
.
Acesta este de fapt un sistem cu structura variabila cu o evolutie ca in Fig.1.8.1. ce fructifica avantajele fiecarei structuri.
Daca marimea reglata este departe de valoarea prescrisa, sistemul are o evolutie rapida iar, daca marimea reglata este aproape de valoarea prescrisa, evolutia este lenta si se evita aparitia unor suprareglaje.
Pentru a concretiza aceasta idee, se defineste o vecinatate de latime laterala δ a valorii prescrise si un semnal s
S=![]() - δ
- δ
denumit criteriu de modificare a structurii.
In functie de valoarea lui s se identifica structura necesara si anume
s<0 ![]() S =
S = ![]() ; s>0 <=>S =
; s>0 <=>S = ![]()
Se concepe un dispozitiv pentru modificarea parametrilor legii de reglare care realizeaza relatiile:

Pentru ca sistemul cu structura variabila sa se comporte ca in Fig.1.8.1. trebuie conceput si un dispozitiv de evitare sau numai atenuare a socurilor care pot apare la modificarea structurii.
1.8.3. Regimuri de evolutie in sistemele cu structura variabila
1.8.3.1. Regimul de comutare
In regimul de comutare starea sistemului parcurge o succesiune de structuri, evolutia in fiecare structura fiind de durata finita.
Succesiunea parcurgerii structurilor sau mai precis comutarea structurilor poate fi libera sau fortata.
Comutarea libera este determinata de atingerea unor valori critice sau specificate ale starii eventual grupate in familii de valori critice. O familie de valori critice determina o anumita structura si numai una.
In regimul de comutare libera, comutarea structurilor se realizeaza astfel in circuit inchis.
Comutarea fortata a structurilor se realizeaza in functie de valorile unui semnal extern sau in functie de conditii de comutare externe sistemului.
In regimul de comutare fortata, comutarea structurilor se realizeaza astfel in circuit deschis.
1.8.3.3. Regimul de alunecare
Regimul de alunecare se caracterizeaza prin schimbarea altemativa a doua structuri S1, S2 cu o frecventa de comutare, teoretic infinita, practic foarte mare.
Daca comutarile au loc in conformitate cu un criteriu de comutare
s=s(x),x= [x1,x2,.,xn]![]()
![]()
ce realizeaza in spatiul de stare al unui sistem de ordinul n,
s(x)>0 =>S = S1,
s(x)<0 => S = S2
atunci, in prima structura S1 valoarea criteriului este s(x)>0 avand insa traiectoriile indreptate spre cealalta structura astfel ca starea depaseste curba data de s(x)=0 si intra in domeniul unde s < 0 ce corespunde celei de a doua structuri S2 dar cu traiectoriile indreptate spre prima structura.
Are loc astfel un fenomen de 'alunecare' de-a lungui unei curbe, denumita curba de alunecare, o solutie care verifica ecuatia
s(x)=0.
Intr-un sistem de reglare in regim de alunecare (sliding mode control) se deosebesc doua etape:
1. Etapa de atingere a curbei de alunecare, ce poate insemna evolutii in regim de comutare
2. Etapa de evolutie in regim de alunecare, numai daca se atinge curba de comutare in care este adevarat acest fenomen.
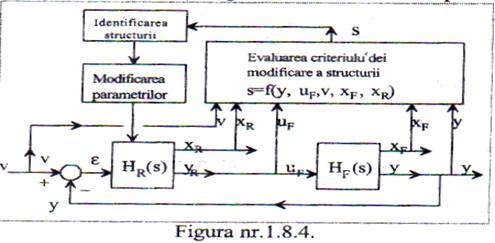
1.8.4. Schema bloc generala a unui sistem cu structura variabila
Este indicata in Fig. 1.8.4. in care se regasesc toate elementele prezentate mai sus.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |