ELEMENTE DE MECANICA NEWTONIANA
1. Miscarea si sistemele de referenta.
Miscarea mecanica - cea mai simpla forma de miscare, consta in schimbarea pozitiilor relative ale corpurilor in spatiu si timp. Atat spatiul cat si timpul au o serie de proprietati proprii. Un spatiu este omogen cand nici un punct al sau nu este privilegiat fata de alte puncte ale spatiului. Spatiul este izotrop cand in diferitele sale puncte nu exista directi privilegiate. De asemenea spunem despre timp ca este uniform, atunci cand legile de miscare nu depind de alegerea originii timpului.
Intrucat miscarea are loc in spatiu si timp, se pune problema localizarii ei intr-un anumit domeniu al spatiului si a determinarii duratei acesteia. Pentru realizarea acestui lucru se foloseste un sistem de referinta, care reprezinta un ansamblu rigid de corpuri si un ceasornic cu ajutorul carora se poate determina pozitia si durata fenomenului studiat.
Alegerea sistemului de referinta se face in mod cu totul arbitrar, miscarea unui corp fata de diferite sisteme de referinta decurgand diferit. Nu exista un sistem de referinta fix fata de care sa se studieze toate miscarile, deci miscarea si repausul au un caracter relativ. Alegerea sistemului de referinta se face in asa fel incat miscarea corpurilor sa apara cat mai simpla, ceea ce, evident, simplifica si forma legii care o guverneaza.
Dintre toate sistemele de referinta o importanta deosebita o reprezinta sistemele de referinta inertale numite si referentiale inetiale. Prin definitie, referentiale in raport cu care este valabila legea inertiei se numesc referentiale inertiale. In aceste sisteme sunt valabile proprietatile de omogenitate si de uniformitate a timpului. Orice sistem de referinta care se misca rectiliniu si uniform fata de un sistem inertial (sistem neaccelerat si fara rotatie) este si el un sistem inertial, echivalent cu primul. Numarul referentialelor inertiale este deci nelimitat si sunt toate echivalente intre ele. Observatorii din diferite sisteme pot obtine diferite valori numerice pentru marimile fizice masurate, dar relatiile dintre marimile masurate, adica legile fizicii, vor fi aceleasi pentru toti observatorii.
Unui sistem de referinta trebuie sa i se ataseze un sistem de coordonate astfel incat ecuatiile de miscare sa aiba forme cat mai simple. In mecanica se utilizeaza cu precadere sistemele de coordonate carteziene (rectangulare), sferice, cilindrice si polare.
Una din principalele notiuni cu care opereaza este aceea de punct material. Prin punct material se intelege un corp ale carui dimensiuni sunt neglijabile in raport cu sistemul de referinta la care este raportata miscarea. Punctul material reprezinta cel mai simplu model fizic, care cuprinde toate proprietatile corpului care efectueaza miscarea (masa, greutate, inertie). Un corp poate fi aproximat cu un punct material in functie de conditiile concrete ale problemei studiate. Astfel, atunci cand se studiaza miscarea planetelor in jurul Soarelui, planetele pot fi considerate puncte materiale, ceea ce nu mai este posibil cand studiem miscarea lor in jurul axelor proprii.
Punctul material in miscare se numeste mobil, iar locul geometric al tuturor punctelor prin care trece mobilul in timpul deplasarii se numeste traiectorie.
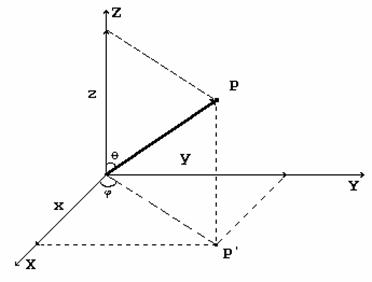
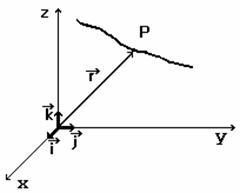
Sa consideram un sistem de
coordonate carteziene Oxyz (fig.2.1.) in
raport cu care pozitia unui punct P este determinata de vectorul
de pozitie ![]() , care poate fi scris astfel:
, care poate fi scris astfel:
|
(2.1.) |
unde x, y, z sunt coordonatele carteziene ale punctului
P, iar ![]() sunt vectorii unitari (versorii) pe cele trei
directii x,y,z.
sunt vectorii unitari (versorii) pe cele trei
directii x,y,z.
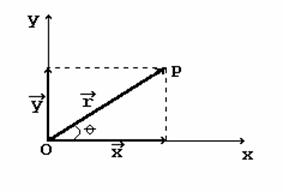
In
situatia in care este nevoie sa se utilizeze sistemul de coordonate
polare (fig.) sunt necesare a fi
cunoscute marimile ![]() si unghiul θ. Relatiile de trecere de la coordonatele polare la
cele carteziene sunt:
si unghiul θ. Relatiile de trecere de la coordonatele polare la
cele carteziene sunt:
|
|
|
3 Fig.2.3. |
In
sistemul de coordonate sferice trebuie cunoscute marimile![]()
![]()
![]() (fig.2.3), iar relatiile de trecere la coordonatele
carteziene au forma:
(fig.2.3), iar relatiile de trecere la coordonatele
carteziene au forma:
|
4 Fig.2.4 |
|
|
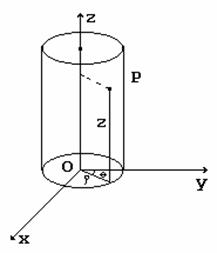
Sistemul de coordonate cilindrice este caracterizat de coodonatele ρ θ, z (fig.2.4.), care sunt legate de coordonatele carteziene prin relatiile:
|
|
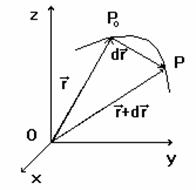
Sa prezentam acum cateva elemente ale miscarii:
Viteza
Viteza instantanee a punctului P (fig.2.5.) se defineste prin raportul dintre spatiul parcurs de mobil si intervalul de timp in care a fost parcurs acest spatiu:
|
(2.5) |
sau:
|
|
|
5 Fig.2.5 |
In sistemul astfel ales, marimea vectorului viteza se exprima prin relatia:
|
|
Daca notam cu ![]() versorul tangentei la
punctul in care se calculeaza viteza, atunci
versorul tangentei la
punctul in care se calculeaza viteza, atunci![]() si relatia (2.5)
capata forma:
si relatia (2.5)
capata forma:
|
|
Rezulta astfel ca viteza este o marime vectoriala, directia ei fiind tangenta la traiectorie in punctul considerat.
Acceleratia
Acceleratia instantanee este definita ca raportul dintre variatia vitezei si intervalul de timp (considerat foarte mic) in care a avut loc aceasta variatie:
|
(2.9) |
Tinand seama de relatia (2.5), se obtine:
|
|
Raportand miscarea la un sistem cartezian de axe, putem scrie:
|
|
Analog relatiei (2.7) putem scrie pentru modulul vectorului acceleratie expresia:
|
|
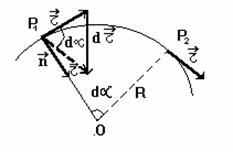
In
general, vectorul acceleratie nu este tangent la traiectorie (cu
exceptia miscarilor rectilinii), el avand o componenta tangenta
la traiectorie si una normala la aceasta. In cazul unei
miscari oarecare viteza ![]() variaza atat ca
directie (
variaza atat ca
directie (![]() ) cat si ca marime
(v) si ca urmare din relatia (2.8) putem scrie:
) cat si ca marime
(v) si ca urmare din relatia (2.8) putem scrie:
|
6 Fig.2.6. |
|
|
Cum ![]() este un vector unitar, avem:
este un vector unitar, avem:
|
|
si derivand aceasta relatie in raport cu timpul, se obtine:
|
|
sau:
|
|
relatie
care arata ca vectorii ![]() si
si ![]() au directii
perpendiculare. Notand cu
au directii
perpendiculare. Notand cu ![]() vectorul unitate al normalei
la traiectorie in punctul respectiv (fig.2.6.), rezulta ca:
vectorul unitate al normalei
la traiectorie in punctul respectiv (fig.2.6.), rezulta ca:
|
|
Ca urmare, relatia (2.13) devine:
|
|
si
arata ca vectorul![]() are doua componente
reciproc perpendiculare: o componenta tangenta la traiectorie,
are doua componente
reciproc perpendiculare: o componenta tangenta la traiectorie,
![]() , determinata de
variatia vitezei ca marime si o componenta normala
la traiectorie,
, determinata de
variatia vitezei ca marime si o componenta normala
la traiectorie, ![]() , determinata de
variatia vitezei ca directie. Cele doua componente au expresiile:
, determinata de
variatia vitezei ca directie. Cele doua componente au expresiile:
|
|
Din figura 2.6 se observa ca:
|
|
iar arcul P1P2=dS=R.dα.
Acum se poate scrie:
|
|
|
|
sau, conform cu relatia (2.18), avem:
Se pot considera cateva cazuri particulare:
a) daca R , miscarea
devine rectilinie si ![]() , putand sa existe numai
, putand sa existe numai ![]()
b) daca R=const. si v=const., miscarea
este uniform circulara si ![]() , respectiv
, respectiv ![]() , ultima numindu-se acceleratie centripeta.
, ultima numindu-se acceleratie centripeta.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |