
CATEDRA AUTOMATIZARI, AUTOMOBILE, MATERIAL RULANT SI DESIGN DE PRODUS
SPECIALIZAREA AUTOVEHICOLE RUTIRE
Pentru un autoturism cu caracteristicile principale: viteza maxima de 150 Km/h , capacitatea de incarcare , 4 locuri; sa se efectueze :
a) Studiul dinamic al automobilului
b) Calculul si constructia suspensiei;
c) Studiul asupra catalizatorilor folositi pt depoluarea m.a.i. pentru autovehicule;
d)Practic: Panoplie convertor catalitic sectionat;
e) Grafic : Desen ansamblu autovehicul tema ( format A0).
1. sTUDIUL DINAMIC AL AUOVEHICULULui
1.1 Constructii similare de autovehicule, evidentierea caracteristicilor constructive si de utilizare
Automobilul este un vehicul rutier, carosat si suspendat elastic pe cel putin trei roti - care se deplaseaza prin mijloace de propulsie proprii in diferite conditii de teren - destinat transportului direct sau prin tractare al unor incarcaturi ce pot fi: bunuri, persoane, etc.
Dupa destinatia lor distingem mai multe tipuri de automobile (figura 1.1):
Fig. 1.1 Clasificarea automobilelor
La randul lor si automobilele destinate transportului de persoane se clasifica dupa numarul de locuri, forma caroseriei, dupa capacitatea cilindrica, etc. In figura 1.2 este prezentata clasificarea acestor automobile dupa numarul pasagerilor transportati:
Fig. 1.2 Clasificarea automobilelor pentru transport persoane
Automobilul din tema de proiect este un autovehicul destinat transportului de persoane care se incadreaza in grupa autoturismelor mici (4.5 locuri pentru pasageri).
1.2 Organizarea generala si parametrii principali
Alegerea solutiei constructive
La ora actuala, raportat la modul de dispunere al motorului pe cadru si la pozitia puntii motoare, se utilizeaza trei variante constructive:
a) solutia "clasica", cu motorul dispus in fata si cu puntea motoare in spate;
b) solutia "totul in fata", cu motorul si puntea motoare in partea din fata a autoturismului;
c) solutia "totul in spate", cu motorul si puntea motoare in partea din spate a autoturismului;
In urma analizarii avantajelor si dezavantajelor fiecareia dintre aceste variante si luand in considerare cerintele impuse automobilului din tema de proiect, am optat pentru solutia "totul in fata" (figura 1.3) datorita avantajelor pe care aceasta le prezinta:
permite cea mai buna utilizare a caroseriei;
permite coborarea caroseriei, ceea ce conduce la coborarea centrului de greutate, asigurandu-se o stabilitate mai mare in viraj,
legaturile intre organele de comanda si grupul motor-transmisie sunt simple si scurte;
permite realizarea unui portbagaj spatios;
rezervorul de combustibil fiind montat in spate, se reduce pericolul de incendiu;
radiatorul este amplasat in zona de presiune dinamica maxima, asigurand un transfer de caldura eficient;
ofera o foarte buna manevrabilitate si stabilitate pe traiectorie, datorita comportamentului subvibrator care este autostabilizant pe traiectoria rectilinie.
Dupa alegerea solutiei de organizare generala, am trecut la alegerea variantei de amplasare a motorului. In cazul solutiei "totul in fata" se utilizeaza urmatoarele pozitii:
a) cu motorul asezat longitudinal in spatele rotilor din fata;
b) cu motorul asezat longitudinal inaintea rotilor din fata;
c) cu motorul asezat longitudinal intre roti;
d) cu motorul asezat transversal.
Analizand avantajele si dezavantajele fiecarei variante, am optat pentru dispunerea motorului longitudinal inaintea rotilor din fata deoarece solutia asigura simplitate constructiva maxima si acces foarte bun pentru interventii.
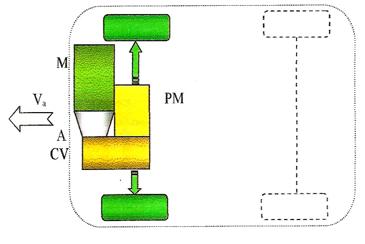
Fig. 1.3 Organizarea generala a automobilului.
M-motor; A-ambreiaj; CV-cutie de viteze; PM-punte motoare
Pentru elementele transmisiei am optat astfel:
a) ambreiaj mecanic cu discuri, deoarece are constructie simpla, greutate redusa si un moment de inertie a partii conduse mic;
b) cutie de viteze mecanica cu 5 trepte, cu axe fixe si cu actionare mecanica, deoarece permite obtinerea variatiei raportului de transmitere in limitele necesare printr-o constructie relativ simpla, cu un randament ridicat si pret de cost scazut;
c) punte motoare articulata cu suspensie independenta pentru fiecare roata.
In ceea ce priveste amenajarea interioara, aceasta are ca obiectiv asigurarea unui confort maxim pentru pasageri si conditii ergonomice de lucru pentru conducatorul autovehiculului. Acestea se realizeaza prin asigurarea spatiului necesar pasagerilor si dispunerea judicioasa a aparatelor de bord (figurile 1.4 si 1.5).

Fig. 1.4 Interiorul unui autoturism de 4 locuri.

Fig. 1.5 Tabloul de bord al unui autoturism de 4 locuri
1.2.2 Tendinte de dezvoltare
Totodata analiza solutiilor aflate in fabricatie in prezent ne da indicii privind tendintele de dezvoltare a autoturismelor si asupra celor mai noi solutii constructive pentru diferitele agregate si sisteme ale automobilului: motor, cutie de viteze, punti motoare, sisteme de directie, sisteme de franare, suspensie, propulsie, etc.
De asemenea de o importanta deosebita sunt masurile luate pentru sporirea confortului si sigurantei pasagerilor si conducatorului auto.
O atentie deosebita se acorda sporirii sigurantei autovehiculelor si pasagerilor pe timpul circulatiei. In acest scop se utilizeaza airbag-uri plaste intr-un mod efigient, care sporesc siguranta pasagerilor in cazul unui impact frontal fig.1.7, lateral sau mai nou ,unui impact posterior fig.1.6 plus centuri de siguranta . De asemenea, se utilizeaza sisteme de franare cu dublu circuit si sisteme de franare cu control electronic ABS (Anty Bloking Sistem).

Fig. 1.6 Airbag cortina pentru luneta (Toyta IQ ).

Fig. 1.7 Volan cu butuc fix pentru o mai buna eficienta a airbag-ului.
Pentru obtinerea unor viteze mari, folosind motoare de putere relativ mica, se urmareste reducerea masei autoturismelor si obtinerea unei aerodinamici mult mai bune prin utilizarea maselor plastice, a materialelor ceramice si a caroseriilor din aliaj de aluminiu si fibra de carbon (figura 1.12).

Fig. 1.8 Caroseria si sasiul Locus Plethore din fibra de carbon.
Pentru imbunatatirea performantelor dinamice, pe langa reducerea masei autoturismelor se urmareste obtinerea unor coeficienti aerodinamici tot mai coborati.
Scaderea consumului de combustibil se realizeaza in principal prin gestionarea electronica a consumului de combustibil in diferite regimuri de functionare.
Tot pentru sporirea sigurantei in circulatie se utilizeaza radare anticoliziune si pneuri fara aer in interior (Denevo-Dunlop) sau pneuri fara camera de aer cu solutie poligel (Puncture Guard) care asigura autovulcanizarea pneurilor in caz de intepare fig.1.9.
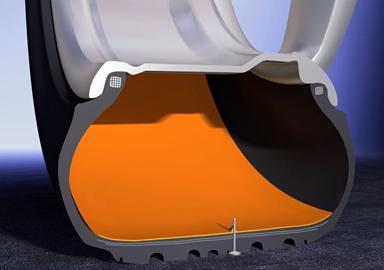
Fig. 1.9 Sectiune anvelopa cu solutie poligel
1.2.3 Studiul solutilor similare
Pentru proiectarea autoturismului din tema este necesara cunoasterea unor automobile similare, avand caracteristici asemanatoare cu ale acestuia.
Elemente despre acestea pot fi obtinute din literatura de specialitate sau din datele furnizate de intreprinderile producatoare. Aceste elemente se refera la organizarea generala, modul de dispunere a motorului si puntilor motoare, parametrii constructivi, capacitatea de incarcare, tipul organelor, sistemelor si instalatiilor utilizate, etc.
Analizand toate aceste informatii si tinand cont de tendintele de dezvoltare din industria de automobile se pot stabili intr-o prima faza, prin comparare, unele date absolut necesare pentru calculul de predimensionare.
Pe baza acestor date se vor adapta dimensiunile principale ale autoturismului, elementele necesare pentru calculul dinamic, determinarea rezistentei la inaintare, puterea efectiva a motorului, etc., valori care la randul lor servesc la determinarea parametrilor constructivi ai motorului.
In tabelul 1.1 sunt prezentate principalele caracteristici ale unor autoturisme care se fabrica in prezent, iar in continuare sunt prezentate cateva dintre acestea.
|
Nr. Crt |
|||||||||||||||
|
Tozota IQ |
Toyota Aygo |
Peugeot 107 |
Opel Corsa C |
Citroen C1 |
Daihatu Move |
Subaru Justy |
Vw Lupo 3L |
Daihatsu Cuore |
Opel Agila |
Smart ForFour |
Tipul Autov. |
||||
|
L1[mm] |
Parametrii constructivi |
||||||||||||||
|
L2[mm] |
|||||||||||||||
|
H[mm] |
|||||||||||||||
|
Go[daN] |
|||||||||||||||
|
Gu[daN] |
|||||||||||||||
|
fata |
fata |
fata |
fata |
fata |
fata |
fata |
fata |
fata |
fata |
fata |
Tractiune |
||||
|
Pmax/np[kw/rpm] |
Parametrii energetici |
||||||||||||||
|
Mmax/nm[Nm/rpm] |
|||||||||||||||
|
Cilindree[cm3] |
|||||||||||||||
|
1.0 L VVT |
1.0L |
1.0L |
1.0L |
1.0L |
1.0 L |
1.0L |
1.0 L |
1.0L |
1.0 L |
1.1 L |
Tip motor |
||||
|
Viteza max.[km/h] |
|||||||||||||||
|
175/65R15 |
175/65R15 |
155/65R14 |
155/80R13 |
155/65R14 |
155/65R13 |
155/80R13 |
155/65R14 |
155/65R13 |
185/60R15 |
195/50R15 |
Pneuri |
||||
|
Consum [l/100km] |
|||||||||||||||
|
Nr.locuri |
|||||||||||||||
Tabel 1.1 Prezentare caracteristici solutii similare

Fig.1.10 SMART FORFOUR

Fig.1.11 OPEL AGILA

Fig.1.12 DAIHATSU CUORE

Fig.1.13 VW LUPO 3L

Fig.1.14 SUBARU JUSTY

Fig.1.15 DAIHATSU MOVE

Fig.1.16 CITROEN C1

Fig.1.17 OPEL CORSA C

Fig.1.18 PEUGEOT 107

Fig.1.19TOYOTA AYGO

Fig.1.20 TOYOTA IQ
1.2.4 Dimensiunile principale ale autoturismului proiectat
Dimensiunile geometrice ce definesc constructia unui automobil sunt prezentate in cele ce urmeaza. Pentru autovehiculul proiectat, aceste dimensiuni le-am ales comparativ cu cele prezentate in tabelul 1.1 tinand seama de valorile medii ale acestora. Valorile adoptate astfel sunt prezentate in tabelul 1.2 si evidentiate in figura 1.21.
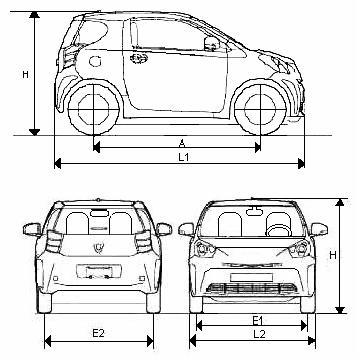
Fig. 1.21 Principalele dimensiuni ale vehiculului
Am optat pentru o solutie tip berlina cu haion, pentru a asigura o forma aerodinamica cat mai buna, in conditiile utilizarii cu maximum de eficienta a spatiului interior. Scaunele sunt dispuse pe doua randuri (2+2) si au prevazute centuri de siguranta pentru toti pasagerii. Scaunele din fata au posibilitatea reglarii spatiale.
- lungimea autoturismului L reprezinta distanta dintre doua plane perpendiculare pe planul longitudinal de simetrie al autoturismului si tangente la acesta in punctele extreme din fata si din spate. Am optat pentru valoarea:
- latimea autoturismului l reprezinta distanta dintre doua plane paralele cu planul longitudinal al autoturismului, tangente la acesta de o parte si de cealalta. Am optat pentru valoarea:
l = 1680 mm
- inaltimea autoturismului H reprezinta distanta dintre planul de sprijin si un plan orizontal tangent la partea cea mai de sus a automobilului pregatit pentru plecarea in cursa, fara incarcatura utila si cu pneurile umflate la presiune corespunzatoare masei totale maxime. Am optat pentru valoarea:
- ampatamentul A reprezinta distanta dintre axele de simetrie ale puntilor autoturismului. Am optat pentru valoarea:
A = 2000 mm
- ecartamentul E reprezinta distanta dintre centrele punctelor de contact ale pneurilor cu solul. Am optat pentru valoarea:
L[mm] |
l [mm] |
H [mm] |
A [mm] |
E1/E2 [mm] | |
|
1.2.5Greutatea automobilului
Greutatea automobilului reprezinta un parametru important la proiectare si reprezinta suma greutatilor tuturor mecanismelor si agregatelor din constructia acestuia, precum si greutatea incarcaturii.
Suma greutatii mecanismelor si agregatelor autovehiculului reprezinta greutatea proprie si se noteaza G0, iar greutatea incarcaturii prescrise reprezinta greutatea utila si se noteaza cu Gu .
Greutatea totala Ga se obtine prin insumarea celor doua greutati.
Ga = G0 + Gu (1.1)
G0 - greutatea initiala. Pentru aceasta marime am adoptat valoarea de 8350 N.
Gu - greutatea utila care se calculeaza cu relatia:
Gu = 75 x n + Gb [N] (1.2)
relatie in care n reprezinta numarul de locuri din microbuz iar Gb reprezinta greutatea bagajelor, in cazul autoturismelor destinate transportului de bunuri considerandu-se 7kg/persoana.
Rezulta:
mu = 300 + 7 = 307 [kg]
ma = 845 + 307 = 1152 [kg]
Coordonatele centrului de greutate:
a/A = 0,49 => a = 0,49. 2000 = 980 [mm] (1.3)
unde: A - ampatamentul
b = A - a = 2000 - 980 = 1020 [mm] (1.4)
hc /A = 0,45 => Hg = 0.45.A = 0,45. 2000 = 900 [mm]
(1.5)
unde: Hg-este inaltimea centrului de greutate.
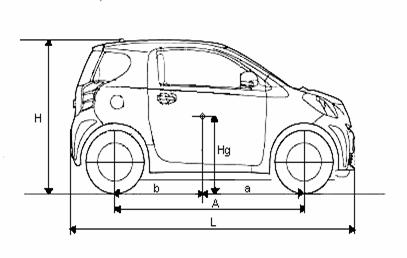
Fig. 1.22 Pozitia centrului de greutate
Raportarea greutatii pe punti :
m1 = (b/A). ma = 1152 . 1020/2000 = 587 kg] (1.5)
m2 = ma - m1 = 1155 - 587 = 568 [kg]
G1 = 5752,6 [N] pe puntea fata
G2 = 5566,4 [N] pe puntea spate
Masa la pneuri:
mp1 = m1/2 = 587/2 = 293 [kg] - fata (1.6)
mp2 = m2/2 = 568/2 = 284 [kg] - spate
1.2.6 Rotile automobilului
Rotile de automobile sunt alcatuite dintr-o janta metalica pe care se monteaza o anvelopa de cauciuc in interiorul careia se afla o camera cu aer comprimat (figurile 1.23 si 1.25).
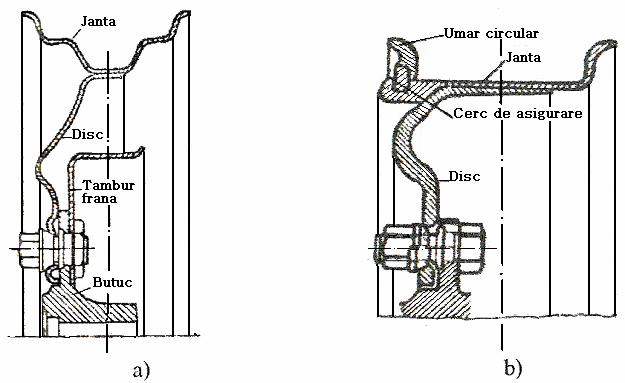
Fig. 1.23 Constructia jentii pentru automobil
a-jeanta nedemontabila; b-janta demontabila
In cazul automobilului proiectat se utilizeaza jenti cu profil adanc, nedemontabile.
Partea elastica a rotii, formata din anvelopa, camera si aerul comprimat, este cunoscuta sub numele de pneu. Unele automobile folosesc pneuri fara camera de aer, aerul comprimat fiind introdus direct in interiorul unei anvelope de constructie speciala.
Cerintele cele mai generale care se pretind rotilor sunt:
- siguranta in exploatare
- confortabilitate
- economicitate
Alegerea pneurilor se face d in functie de incarcarea maxima pe pneu.
Simbolul anvelopei reprezinta modul de identificare a anvelopei si se compune din cifre si litere astfel (figura 1.24):
Fig.1.24 Marcaje tipice ale unei anvelope.
latimea sectiunii anvelopei in mm;
raportul dintre inaltimea sectiunii si latimea sectiunii;
constructia anvelopei (R=Radiala);
diametrul jantei in inch;
capacitatea maxima de incarcare (indice de sarcina);
simbol de viteza ;
anvelopa fara camera de aer;
marca si numar aprobare tip ECE;
amplasarea indicatorului de uzura a benzii de rulare;
caracteristici de iarna M&S (Mud&Snow- Noroi&Zapada);
testata si calificata pentru "Utilizare in conditii severe de iarna"
data de fabricatie;
simbolulu de conformitate al Departamentului de Transport;
cod producator D.O.T.;
tara de fabricatie;
denumirea comerciala;
detalii de constructie ale anvelopei;
marcaj al sarcinii si presiunii;
tipul anvelopei (radial);
marca impusa de reglementarile SUA privind informarea consumatorului (clasa de calitate);
indicatorul de uzura al benzi de rulare pentru iarna.
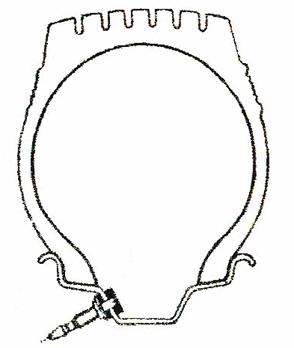
Fig. 1.25 Constructia pneului fara camera de aer
Pornind de la sarcinile de incarcare si viteza de rulare, se poate alege tipul anvelopelor necesare .
Astfel pentru sarcina pe anvelopa calculata de 545 kg si o presiune de 2 daN/cm2, se aleg anvelope 175/65 R 15 87P, cu diametrul exterior D = 593 mm si latimea sectiunii maxime de B =185 mm. In aceste conditii, stiind ca d = 15 inch, adica d = 381 mm (1inch =25,4mm) , rezulta ca inaltimea sectiunii transversale H va avea valoarea H = 1/2.(D - d), adica, H=0,5.(593 - 381) = 106 mm.
Folosind notatiile din figura 1.26, se poate determina raza nominala a rotii ra cu relatia:
ra = (d/2) + H (1.7)
Prin inlocuire, obtinem:
ra = 190.5 + 106 = 296.5 mm
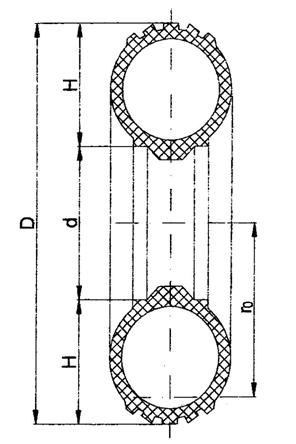
Fig.1.26 Dimensiunile principale ale pneurilor
Intre inaltimea sectiunii transversale a anvelopei H si latimea B exista relatia:
H/B = 0,82.1,05.
Optez pentru valoarea 0,9.
In aceste conditii, rezulta ca B = H/0,9 = 175/0,9 = 185 [mm].
Raza de rulare a rotii, rr se determina cu relatia:
rr = l . ra (1.8)
Tinand seama ca l este coeficientul de deformare a pneului cu valori cuprinse intre 0,93.0,935 (am optat pentru l = 0,93), obtinem:
rr = 0,93 x 296.5 = 275.7 mm].
1.3 Definirea conditiei de autopropulsare
1.3.1. Rezistentele la inaintarea automobilului
Siguranta in exploatare este satisfacuta de roti daca au o rezistenta corespunzatoare, aderenta buna cu calea de rulare, etanseitate perfecta si daca asigura automobilului stabilitate corespunzatoare.
Confortabilitatea este data de capacitatea partii elastice a rotii (pneu) de a amortiza oscilatiile si de a diminua zgomotul ce se produce in rulare.
Autopropulsarea automobilului reprezinta rezultatul actiunii dupa directia de deplasare a fortelor active si fortelor rezistente.
-Fortele active sunt fortele generate de momentul motor cu aceeasi directie si sens cu viteza de deplasare.
-Fortele rezistente sunt fortele rezultate la interactiunea automobilului cu mediul avand aceeasi directie cu viteza de deplasare dar sens contrar (figura 1.27).
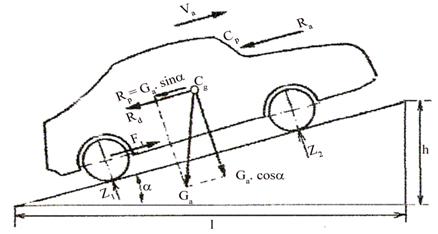
Fig.1.27 Rezistentele la inaintarea automobilului
Fig. 1.28 Fortele care se opun deplasarii automobilului
1.3.2. Rezistenta la rulare
Rezistenta la rulare reprezinta rezistenta ce apare la contactul rotilor cu calea.
Coeficientul rezistent la rulare: f = 0,013..0,020. Se adopta f = 0,016
Calculul rezistentei la rulare:
Rr = Ga x f x cosa (1.9)
unde: a - panta caii de rulare
a = 18o
cosa
Ga = ma x g = 1152 x 9,8 = 11289,6 [N] (forta de greutate a automobilului) ; (1.10)
aproximam Ga= 11290 [N]
g - forta gravitationala
Rr = 11290 x 0,016 x 0,95 = 172 [N]
Cauzele fizice ale acestei rezistente sunt:
- deformarea cu histerezis a pneului
- frecarea superficiala dintre pneu si cale
- frecarea din lagarele rotii
- deformarea caii
efectul de ventuza produs de profilul cu contur inchis pe banda de rulare.
Ca urmare a modului de distribuire a presiunilor in "pata de contact" dintre pneu si calea de rulare, centrul de deplasare al amprentei este deplasat in fata centrului contactului cu marimea (figura 1.29):
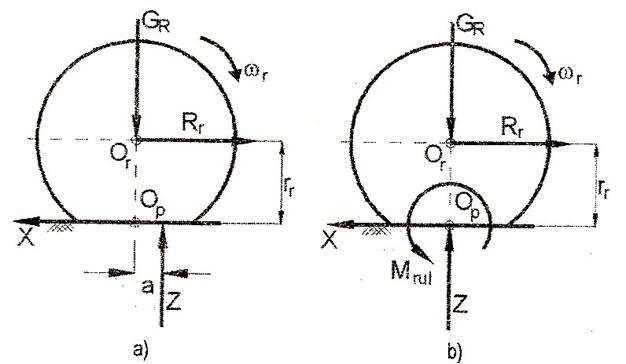
Fig. 1.29 Actiunile momentului de rezistenta la rulare asupra unei roti motoare
a) rezultanta fortelor din pata de contact; b) reducerea reactiunii normale Z
1.3.3 Rezistenta aerului
Rezistenta aerului este specifica la deplasarea automobilului prin contactul dintre caroserie si aer. Natura acestei rezistente o reprezinta presiunea diferentiala dintre partea din fata si cea din spate, frecarile dintre caroserie si aer, etc.
Cauze fizice:
- repartitia inegala a presiunii pe partea din fata si din spate a carcasei
frecarea dintre aer si suprafetele de langa care au loc curgerea acestuia
- energia consumata pentru turbionarea aerului
- rezistenta curentilor externi folositi pentru racirea diferitelor organe si pentru ventilarea caroseriei.
Factori de influenta:
- forma automobilului
- marimea sectiunii transversale a automobilului
- viteza de deplasare
- densitatea aerului
Alegerea marimii coeficientilor de rezistenta a aerului.
Cx = 0,3.0,5. Se adopta Cx = 0,4 (Autoturism cu caroseria inchisa)
Coeficientul aerodinamic este imbunatatit prin alegerea unor forme rotunjite, evitarea trecerilor bruste de la o sectiune la alta, utilizarea eleroanelor, spoilerelor, etc.
Calculul rezistentei aerului:
Ra = ½ x r x Cx x A x vmax2 [N] (1.11)
r - densitatea aerului [kg/m3]. r= 1,225kg/cm2
Cx - coeficientul aerodinamic dupa directia longitudinala
A - sectiunea transversala a automobilului masurata in m2
vmax - viteza maxima a automobilului [m/s].
vmax = 150 x 1000/3600 = 41,67 [m/s]
A = L2 x H
unde:
L2-latimea autovehiculului [m]
H-inaltimea autovehiculului [m]
A = 1,680 x 1,500 = 2,5 [m2
Rezulta:
Ra = 1/2 x 1,225 x 0,4 x 2,5 x 41,672 = 1063 [N]
1.3.4 Rezistenta la panta
Este specifica rularii automobilului pe cai cu inclinare longitudinala.
Ea poate avea valori pozitive (la urcare) si negative (la coborare).
Rp = ± Ga x sina (1.13)
Pentru a = 18o
unde: a - panta caii de rulare
Rp = 11290 x sin 18o = 3489 [N]
1.3.5 Rezistenta la demaraj
La miscarea accelerata, masa totala a automobilului, in miscare de translatie cu acceleratia, se opune miscarii cu o forta de inertie "Fi", iar piesele in miscare de rotatie cu momentul de inertie "I" si acceleratia unghiulara "e" se opune si cu un moment de inertie.
MI = -I. e
Factorii de influenta:
- greutatea automobilului
- masa maselor in miscare de rotatie
- acceleratia de demarare
Estimarea rezistentei la demarare se face cu relatia:
Rd = ma. d. (dv/dt) [N] (1.14)
ma = masa automobilului [kg]
dv/dt = acceleratia miscarii de translatie a automobilului [m/s2]
d= coeficient de influenta al maselor aflate in miscare de rotatie.
d = 1,33
a = 3,5 m/s2
Rd = 1152 x 1,33 x 3,5 = 5362 N
1.3.5 Forme particulare ale ecuatiei generale de miscare
Aceasta se obtine din echilibrul dinamic dupa directia miscarii:
Fr = Rr + Ra + Rp + Rd (1.15)
unde Fr = forta la roata
Fr = 172 + 1063 + 3489 + 5362 = 10086 N]
1.4 Calculul de tractiune
1.4.1Calculul randamentului transmisiei
Puterea efectiva a motorului nu ajunge in totalitatea ei la rotile automobilului, o parte pierzandu-se in transmisie prin fenomenul de frecare.
Pierderile de putere in transmisie sunt definite cantitativ prin randamentul transmisiei ht cu relatia:
ht = Pr/P = (P-Ptr)/P = 1 - (Ptr/P) (1.16)
unde: Pr - puterea la roata
P - puterea efectiva a motorului
Ptr - puterea pierduta prin transmisie
Randamentul total al transmisiei este dat de relatia:
ht hcv hd he. h (1.17)
unde: hcv - randamentul cutiei de viteze
hd - randamentul cutiei de distributie
he - randamentul transmisiei longitudinale
ho - randamentul transmisiei principale
Transmisiile mecanice cu roti dintate au randamentul cel mai ridicat in comparatie cu transmisiile hidraulice sau electrice.
Randamentul cutiei de viteze este scazut din cauza raportului mare de transmisie, in timp ce in transmisia principala, randamentul are valori mai ridicate datorita turatiilor mici.
Datorita acestor efecte compensatoare, valoarea randamentului transmisiei se poate considera constanta, indiferent de viteza si de treapta de viteza utilizata:
ht
Se adopta ht
1.4.2 Determinarea puterii maxime
Autopropulsarea automobilului se realizeaza cu ajutorul energiei mecanice primita de la motorul automobilului.
Puterea maxima Pvmax a motorului se determina din conditia impusa prin tema de proiectare de realizare a vitezei maxime:
Pvmax = FRmax. vmax/ht (1.18)
unde: FRmax forta la roata
V max - viteza maxima a automobilului
n t - randamentul transmisiei
Inlocuind obtinem:
Pvmax = 10086 x 41,67/0,90 = 46698 W = 46,698 [kW]
Punand conditia ca puterea la viteza maxima sa corespunda punctului de turatie maxim pentru puterea maxima a motorului Pmax, obtinem expresia:
Pmax = Pvmax/[a(nmax/np) + b( nmax/np)2 - g( nmax/np)3] (1.19)
unde: a, b ,g sunt coeficienti polinomiali
np este turatia motorului la puterea maxima
nmax este turatia maxima a motorului
nM turatia motorului la momentul maxim
a = (3-4Ce) /2(1 - Ce);b = 2.Ce /2(1 - Ce);g = /2(1 - Ce); (1.20)
unde: C e = nM/np - coeficient de elasticitate al motorului.
Ca = Mmax/Mp - coeficient de adaptabilitate al motorului
Ce = 0,45.0,65 Se adopta: Ce=0,60
Ca = 1,10.1,25 Se adopta: Ca=1,1
a = (3-4.Ce)/2. (1-Ce) = (3 - 4.0,60)/2. (1 - 0,60) = 0,75
b = 2Ce /2. (1- Ce) = 2. 0,60/2. (1 -0,60) = 1,5
g = /2(1- Ce) = -1/2. (1 - 0,60) = -1,25
Rezulta: a + b + g = 1
nmax = 6300 rot/min
np = 6000 rot/min
nM = 4800 rot/min
In aceste conditii:
Pmax = 46,698/(0,75 x 1,1 + 1,5 x 1,21 - 1,25 x 1,33) = 48 kW =65 CP
1.4.3 Trasarea caracteristicii externe
Prin caracteristica exterioara a motorului se intelege dependenta puterii efective, momentul motor efectiv, consumul orar si specific efectiv de combustibil, in functie de turatia arborelui cotit, in conditiile de sarcina totala, deci pentru doza maxima de combustibil pe ciclu si pe cilindru.
La proiectarea unui motor de automobil este necesara cunoasterea acestei caracteristici. Ridicarea acestei caracteristici (cantitative), constituie o problema dificila, datorita deosebirilor pe care le antreneaza, indeosebi diferitelor tipuri de camere de ardere.
Turatiile semnificative intr-o astfel de caracteristica sunt:
-turatia minima;
-turatia de moment maxim nM;
-turatia de putere maxima nP;
-turatia maxima de mers in sarcina nm.
Intre nm si np exista relatia: nm= np. 1,1
Pentru proiectare se impune turatia np, iar daca nu se impune, se alege in functie de tipul si destinatia motorului.
Raportul a doua turatii caracteristice mentionate anterior determina relatiile:
Ce = nM/ np < 1
Ce = 4800/ 6000 < 1
Ce - coeficient de elasticitate.
Cu cat Ce este mai mic, adica, cu cat nM este mai departe de np, cu atat este mai redusa nevoia de a interveni in conducerea automobilului, prin schimbarea treptelor de viteza.
Alegerea motorului, precum si determinarea elementelor acestuia se face in functie de motorizarile solutiilor similare.
Alegerea (determinarea) parametrilor de calcul:
a) Punct mort superior ( p.m.s.) este pozitia extrema a pistonului corespunzatoare volumului minim ocupat de gaze (Vc) sau pozitia pistonului corespunzatoare distantei maxime dintre acesta si axa de rotatie a arborelui cotit ( 1+r ), pozitie pentru care a si b
b) Punct mort inferior (p.m.i.) este pozitia extrema a pistonului corespunzatoare volumului maxim ocupat de gaze (Va) sau pozitia pistonului corespunzatoare distantei minime dintre acesta si axa de rotatie a arborelui cotit ( 1-r ), pozitie pentru care a si b
c) Cursa pistonului (S) este spatiul parcurs de piston intre cele doua puncte moarte.
S = 2 r = 84 [mm] (1.21)
d) Alezajul (D) reprezinta diametrul interior al cilindrului
D = 71 [mm]
e) raportul cursa - alezaj y este un parametru consecutiv al motoarelor ce se exprima prin relatia :
y = S / D = 1, 18 (1.22)
f) Cilindreea unitara ( Vs) reprezinta volumul generat de piston intre cele doua puncte moarte, pe cursa S:
Vs = p x D2/4 x S (1.23)
Vs = p x 7,12/4 x 8,4 = 332.57 [cm3]
g) Cilindreea totala (Vt) reprezinta suma cilindreei unitare ale tuturor cilindrilor
Vt = Vs x i (1.24)
Vt = 332.57 x 3 = 997.71 [cm3]
h) Volumul camerei de ardere ( Vc) reprezinta volumul minim ocupat de fluidul motor, cand pistonul se gaseste la p.m.s
Vc = Vs / ( e (1.25)
Vc = 332,57 /9,9 = 33,59 [cm3]
unde :
e raportul de compresie
i) Volumul cilindrului (Va) reprezinta volumul maxim ocupat de fluidul motor cand pistonul se gaseste la p.m.i.
Va = Vs + Vc (1.26)
Va = 332,57 + 39,59 = 372.16 [cm3]
j) Raportul de comprimare (e) reprezinta raportul dintre volumul maxim ocupat de fluidul motor, cand pistonul se gaseste la p.m.i. si volumul minim ocupat de acesta, cand pistonul se gaseste la p.m.s.
e = Va / Vc = 10,9 (1.27)
l) Lungimea bielei este:
lb = S + dfm/2+ Hm + (02) [mm] (1.28)
relatie in care:
dfm este diametrul fusului maneton, care se calculeaza cu relatia:
dfm = 0,6 x D= 0,6 x 71= 42,6 [mm]
adica:
dfm = 42,6 mm
Se adopta valoarea de 45 mm.
Hbo reprezinta inaltimea de dispunere a boltului.
Hbo = Hp - Hc (1.29) unde:
Hp este inaltimea pistonului:
Hp = (0,450,5) x D = 1,1 x 71 = 78,1 [mm]
Hc este inaltimea de compresie:
Hc = (0,450,5) x Hp= 0,48 x 78, 1= 37,48 [mm].
Inlocuind, obtinem:
Hbo = Hp- Hc= 78,1- 37,48= 40,6 [mm]
resectiv:
lb = 84+ 42,6/ 2+ 40,6 + 1= 146,9 [mm]
Se adopta valoarea de lb= 147 [mm]
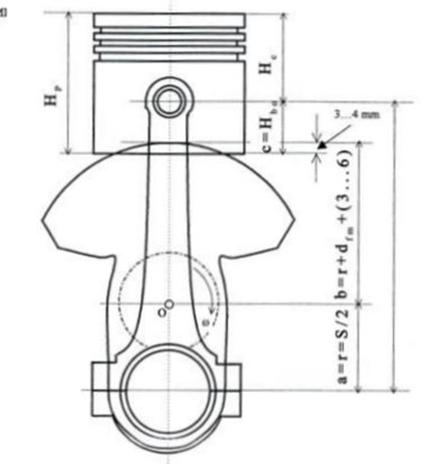
Fig.1.30 Stabilirea lungimii bielei
Datele pentru trasarea caracteristicii exterioare:
D - 71 mm - alezaj
S - 84 mm - cursa pistonului
lb - 147 mm - lungimea bielei
ε - 10,9 - raport de comprimare
nM - 4800 rot/min - turatia de moment maxim
nP - 6000rot/min - turatia de putere maxima
Ce - coeficient de elasticitate
Ca - coeficient de adaptabilitate
α, β, γ - coeficienti polinomiali
P - puterea
M - moment
Cep - consum specific
Consumul specific de combustibil la putere maxima: cep= 280350 g/ kW; se alege: cep= 300g/ kW
Adoptam valorile: l = 1,1; ce = 280 g/kw, e
Utilizand un program specializat , obtinem valorile necesare pentru trasarea caracteristicii externe a motorului.
Tab. 1.3
Pentru calculul Ce se va utiliza
relatia:
Ce = Cep
|
n [rot/min] |
(n/nP) |
(n/nP)2 |
(n/nP)3 |
Pe [kW] |
Me [N.m] |
ce g/kW.h |
Ch [kg/h] |
Obs |
|
Mmax |
||||||||
|
Pmax |
||||||||
Fig.1.30 Caracteristica externa
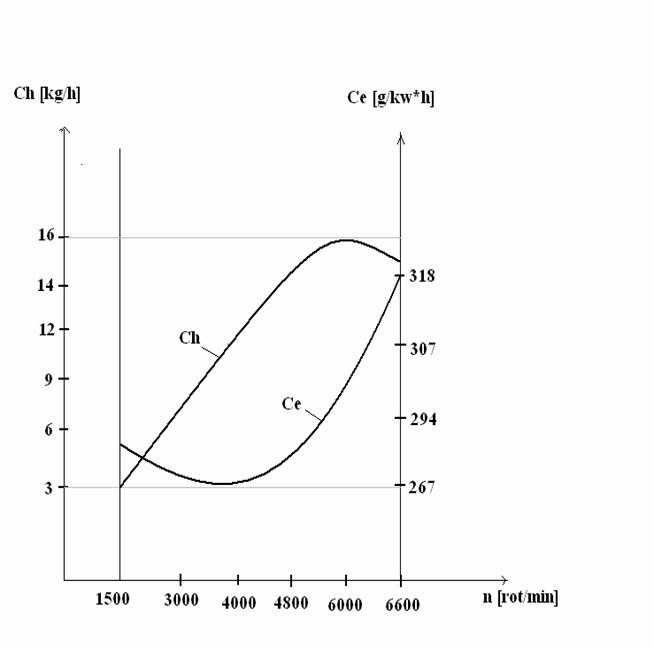
Fig.1.31 Caracteristica de consum
1.5.1 Determinarea rapoartelor de transmitere ale transmisiei
Rezistentele la inaintare ale automobilului sunt foarte diferite, ele depinzand de o multitudine de factori cum sunt: viteza de deplasare, starea de incarcare, calitatile si geometria rotilor de rulare. Toate acestea conduc la modificarea rezistentelor la inaintare, intr-o plaja foarte larga de valori, rezistente care trebuie invinse de forta de tractiune dezvoltata la rotile motoare ale automobilului. Pentru acoperirea acestei plaje, este nevoie de transmisie, in urmatoarele conditii:
- Motorul sa poata acoperi intreaga gama de rezistente. Pentru aceasta, puterea furnizata de el trebuie sa fie constanta in toate regimurile de deplasare. Corespunzator puterii maxime, se obtine caracteristica ideala de tractiune data de relatia:
FR .v = PRmax = ct [kW] (1.30)
-Viteza maxima sa fie delimitata de puterea maxima de autopropulsare:
vmax = PRmax/FRvmax [m/s] (1.31)
relatie in care FRvmax reprezinta forta la roata necesara deplasarii cu viteza maxima de performanta.
- La viteze foarte mici, fortele la roti sunt foarte mari. Ca urmare, la viteze mici, limita este data de aderenta rotilor cu calea:
FRmax = j.Gad (1.32)
Avand in vedere posibilitatile limitate ale motoarelor de a raspunde tuturor modificarilor rezistentelor la inaintare, a aparut necesitatea introducerii in lantul cinematic al transmisiei a unui modul care sa poata modifica in limitele cerute de conditiile de deplasare, valoarea momentului motor transmis la rotile motoare. Acesta este format din elementele prezentate in figura 1.13.
Determinarea valorii maxime a raportului de transmitere se realizeaza cu relatia:
itmax = FRmax · rr / Mmax · ηt = φ · Ga · rr / Mmax · ηt (1.33)
itmax = 0,385 · 994,3 / 90 · 0,90 = 23,55
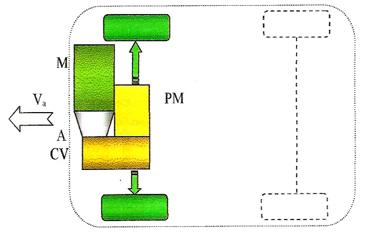
Fig. 1.32 Schema transmisiei unui automobil 4x2 solutia "totul in fata"
M-motor; A-ambreiaj; CV-cutie de viteze; PM-punte motoare;
Determinarea valorii minime a raportului de transmitere se realizeaza cu relatia:
itmin = π / 30 · rd · nmax / vmax
itmin = π / 30 · 0,385 · 6300 / 41,67 = 6,04
iCV1 = itmax / itmin (1.34)
iCV1 = 23,55/ 6,04 = 3,90
Numarul de trepte minim necesar este:
n ≥ 1 + log iCV1 / log nm / nM (1.35)
(1.46)
n = 1+log 3,90 / log (6300 / 4800) = 1,21
Adopt pentru proiect 5 trepte de viteza, din care 4 trepte normale plus o a cincea treapta pentru deplasarea interurbana in regim economicos de functionare a motorului.
Valorile rapoartelor de transmitere din cutia de viteze:
Fiind determinat numarul de trepte si tinand seama ca in-1 = 1, rapoartele de transmitere in cele cinci trepte se vor calcula cu relatia:
iCVk = (iCV1)(n-k)/(n-1) (1.36)
si vor avea valorile prezentate in tabelul 1.4:
Tab. 1.4
Valorile calculate ale rapoartelor de transmitere din cutia de viteze
|
Treapta de viteza |
Valoarea raportului |
Relatia de calcul |
|
Tr. I |
iCV1 = itmax//itmin |
|
|
Tr. II |
iCV2 = (iCV1)2/3 |
|
|
Tr. III |
iCV3 = (iCV1)1/3 |
|
|
Tr. IV | ||
|
Tr. V |
iCV5 = (1/itmin). 3,14.nec.rr/30.vm |
1.5.2 Performantele dinamice
Performantele dinamice reprezinta acele performante ce caracterizeaza capacitatea de autopropulsare a autovehicolului.
Studiul acestor performante se face utilizand:
- caracteristica de tractiune;
- caracteristica puterilor;
- caracteristica dinamica.
a) Caracteristica de tractiune
Aceasta caracteristica reprezinta curbele de variatie ale fortei la roata in functie de viteza de deplasare a autovehicolului pentru fiecare treapta utilizata:
Relatiile de calcul pentru construirea caracteristicii fortei la roata sunt:
FRk = M · itk · ηt / rd (1.37)
unde: M este momentul motor;
itk este raportul de transmitere al transmisiei, cand este cuplata treapta k de viteza cu raportul iCVk;
rd este raza dinamica.
Viteza de deplasare a autovehicolului se calculeaza cu relatia:
vk= rd · π · n / 30 · itk (1.38)
Puterea la roata se determina cu relatia:
PR= FR · v (1.39)
Din relatia:
itmax = iCV1. io (1.40)
rezulta:
io = itmax/iCV1 = 23,55/3,90 = 4,72
Tab 1.5
Caracteristicile de tractiune
Viteza I
|
n [rot/min] |
Me [N · m] |
FR [N] |
Va [m/s] |
PR [kW] |
Viteza II
|
n [rot/min] |
Me [N · m] |
FR [N] |
Va [m/s] |
PR [kW] |
Viteza III
|
n [rot/min] |
Me [N · m] |
FR [N] |
Va [m/s] |
PR [kw] |
Viteza IV
|
n [rot/min] |
Me [N · m] |
FR [N] |
Va [m/s] |
PR [kW] |
Viteza V
|
n [rot/min] |
Me [N · m] |
FR [N] |
Va [m/s] |
PR [kW] |
b) Caracteristica dinamica
Performantele dinamice ale autovehicolului depind de factorul dimensional, care face ca performantele obtinute, prin studiul caracteristicii fortei la roata sa nu fie concludente ca termeni de comparare, deoarece la valori egale ale fortei excedentare calitatile dinamice ale automobilului sa nu fie egale.
Pentru determinarea factorului dinamic D si aprecierea calitatilor de autopropulsare se utilizeaza relatia:
D = Fex / Ga = f · cos α + sin α + (δ / g) · (dv / dt) (1.41)
D = 0,016 x 0,95 + 0,31 +1,392 x 2/10 = 0,605
Pentru determinarea factorului dinamic pentru o treapta a cutiei de viteze, cunoscand valoarea factorului dinamic in priza directa se utilizeaza relatia:
Dk = (FR · iCVk - 0,5 · ρ · cx · A · v2 / iCVk2) / Ga (1.42)
Trasarea caracteristicii dinamice necesita utilizarea caracteristicii fortei la roata folosind relatia:
Dk = (FR - k · A · v2) / Ga (1.43)
Tab. 1.6
Viteza I
|
n [rot/min] |
FR [N] |
V2 [m/s] |
k.A.v2 |
FR - k.A.v2 |
D |
Viteza II
|
n [rot/min] |
FR [N] |
V2 [m/s] |
k.A.v2 |
FR - k.A.v2 |
D |
Viteza III
|
n [rot/min] |
FR [N] |
V2 [m/s] |
k.A.v2 |
FR - k.A.v2 |
D |
Viteza IV
|
n [rot/min] |
FR [N] |
V2 [m/s] |
k.A.v2 |
FR - k.A.v2 |
D |
Viteza V
|
n [rot/min] |
FR [N] |
V2 [m/s] |
k.A.v2 |
FR - k.A.v2 |
D |
1.6 Performantele de franare
Franarea este procesul prin care se reduce partial sau total viteza autovehicolului, care se realizeaza prin generarea unui moment in mecanismele de franare ale rotilor. Acest moment de franare determina aparitia unei forte de franare la roti indreptata dupa directia vitezei autovehicolului, dar de sens opus.
Aprecierea si compararea capacitatii de franare a autovehicolului se face cu ajutorul deceleratiei maxime, a timpului de franare si a spatiului minim de franare, in functie de viteza initiala a autovehicolului.
Pentru micsorarea spatiului de franare, in constructia sistemelor de franare s-au introdus dispozitive de reglare a fortei de franare pe punti in functie de sarcina dinamica (sau statica).
Normativele privitoare la capacitatea de franare, valabile in tara noastra, acorda o atentie deosebita eficacitatii sistemelor si dispozitivelor de franare evaluate pe baza spatiului de franare .
Astfel, performantele sistemelor de franare ale autovehiculelor asemanatoare celui din tema de proiectare si prevazute, sunt:
Tab. 1.7
Cerinte pentru sistemele de franare
|
Autovehicolul |
Viteza de incercare [km/h] |
Efortul maxim la pedala [daN] |
Formula pentru calculul spatiului de franare [m] |
Dece-leratia medie [m/s2] |
|
|
Tipul |
Categoria |
||||
|
Autoturism |
M1 |
Sf ≤ 0,1·v+v2/150 | |||
a) Determinarea deceleratiei
Pentru automobilul din tema de proiect, in cazul in care care franeaza numai rotile puntii fata, deceleratia maxima se obtine atunci cand rotile franate ajung la limita de aderenta in timp ce rotile puntii spate ruleaza liber.
Deceleratia maxima ideala se afla, in aceste conditii cu relatia urmatoare:
(df)maxp= (dv/dt) = g x (φ x cos α + sin α) (1.44)
(df)maxp= 9,8 x (0,8 x cos 0+sin 0) = 7,848 m/s2
unde: g = 9,8 m/s2 este acceleratia gravitationala
φ - coeficient de aderenta
α = 0o este unghiul de inclinare longitudinala a drumului
b) Determinarea spatiului de franare
Dintre toti parametrii capacitatii de franare, spatiul de franare determina la modul cel mai direct calitatile de franare in stransa lagatura cu siguranta circulatiei.
Relatia cu care se determina spatiului minim posibil de franare este:
Sfminp = v2/ 26 x φ x g (1.44)
Sfminp = 1502/ 26 x 0,8 x 9,8 = 110,38 [m]
c) Determinarea timpului de franare
Timpul de franare prezinta importanta mai ales in analiza proceselor de lucru ale dispozitivelor de franare si mai putin este utilizat pentru aprecierea capacitatii de franare a autovehiculelor.
tfmin = v / 3,6 x φ x (1.45)
tfmin = 150 / 3,6 x 0,8 x 9,8 = 5,3 [s]
d) Coeficientii de utilizare a aderentei si repartizarea fortelor de franare intre puntile automobilului
Considerand un caz ideal, in care automobilul se afla in miscare rectilinie franata in conditiile in care fortele de franare la roti ating simultan limita aderentei, reactiunile normale la punti se determina cu expresiile urmatoare:
- pentru puntea din fata:
Z1 = G1 + Ga x (hg / A) x φ (1.46)
Z1 = 5753 + 11290 x (900/2000) x 0,8 = 9817 [N]
- pentru puntea din spate
Z2 = G2 - Ga x (hg / A) x φ (1.35)
Z2 = 5566 - 11290 x (900/2000) x 0,8 = 1502 [N]
unde: Ga, G1, G2 sunt greutatea automobilului si respectiv greutatile statice repartizate pe punti;
- hg inaltimea centrului de greutate;
- A ampatamentul automobilului;
- φ coeficientul de aderenta.
Reactiunile tangentiale maxime la franare se determina cu relatiile:
Ff1 = φ x Z1 (1.47)
Ff1 = 0,8 x 9817 = 7854 N
respectiv:
Ff2 = φ x Z2 (1.48)
Ff2 = 0,8 x 1502 = 1202 N
Notand cu if raportul de repartizare a fortei de franare pe puntea din fata (if = Ff1/Ff), si cu is raportul de repartizare a sarcinii statice pe puntea din fata (is = G1/Ga) obtinem valorile coeficientilor de utilizare a aderentei pentru punti xi
if = Ff1 / Ga x df (1.49)
if = 7854 / 11290 x 0,8 = 0,86
is = G1 / Ga (1.50)
is = 5753 / 11290 = 0,5
Deci, coeficientii de utilizare a aderentei sunt:
- pentru puntea fata
ς1 = if / (is / df + hg / A) (1.51)
ς1 = 0,86/ (0,5 / 0,8 + 900 / 2000) = 0,8
- pentru puntea spate
ς2 = 1 - if / (is / df - hg / A) (1.52)
ς2 = 1 - 0,86/ (0,5 / 0,8 - 900 / 2000) = 0,8
Din rezultatele coeficientilor de utilizare a aderentei rezulta ca ς1 = ς2 si deci la franare rotile puntii fata ating limita aderentei simultan rotilor din spate.
2.CALCULUL SI CONSTRUCTIA SUSPENSIEI
2.1 Generalitati.
Suspensia automobilului relizeaza legatura elastica intre caroserie si punti. Ea este destinata sa atenueze sarcinile dinamice ce se transmit de la drum, sa imprime oscilatiilor caracterul dorit si sa transmita fortele care actioneaza asupra rotilor si asupra caroseriei.
Suspensia automobilului este compusa din
- elementele elastice,
- dispozitivele de ghidare
- elementele de amortizare.
Elementele elastice contribuie la micsorarea sarcinii dinamice verticale, provocand oscilatiile caroseriei de amplitudine si frecvente cat mai suportabile pentru pasageri si care sa nu dauneze incarcaturii care se transporta.
Dispozitivele de ghidare transmit componentele orizontale ale fortelor dintre roti si drum si momentele acestor forte la caroserie, determinand si caracterul deplasarii rotilor in raport cu caroseria automobilului si in raport cu drumul.
Suspensia automobilului trebuie sa indeplineasca urmatoarele cerinte:
sa aiba o caracteristica elastica care asigura un confort corespunzator, cu inclinari transversale reduse, fara lovituri in tampoanele limitatoare si cu o stabilitate buna;
caracteristica amortizorului sa corespunda cu cea ceruta de confortabilitate;
sa asigure o cinematica corecta a rotilor de directie in scopul micsorarii uzurii anvelopelor si stabilizarii rotilor;
cinematica corespunzatoare a sistemului de directie;
transmiterea fortelor orizontale si a momentelor reactive de la roata la caroserie;
durabilitate suficienta a elementelor elastice, care fac parte din piesele cele mai solicitate ale automobilului;
greutate mica;
frecventa oscilatiilor proprii, pentru autovehiculele de transport marfuri sa fie de 70.90 oscilatii pe minut;
rigiditatea elementelor elastice sa fie cat mai redusa;
amortizarea oscilatiilor trebuie sa fie suficienta astfel incat dupa o perioada amplitudinile sa se micsoreze de la 3 pana la 8 ori.
2.2 Clasificarea suspensiilor
Suspensiile automobilelor se clasifica conform figurii 2.1:
Fig. 2.1 Clasificarea suspensiilor
Suspensia dependenta este caraterizata printr-o legatura rigida intre rotile din stanga si din dreapta, iar ridicarea sau coborarea unei roti, produsa de denivelarile caii, provoaca schimbarea pozitiei si pentru cealalta roata. La suspensia independenta lipseste legatura directa dintre rotile automobilului, iar schimbarea pozitiei unei roti nu influenteaza pozitia celeilalte roti. In functie de planul in care se deplaseaza roata la ridicarea ei se deosebesc suspensii independente cu deplasarea rotilor in planul transversal, planul longitudinal sau concomitent in ambele plane. In afara de acestea se intalnesc si suspensii independente cu deplasarea verticala a rotii.
Suspensia independenta prezinta fata de cea dependenta urmatoarele avantaje: imbunatatirea confortului prin reducerea masei nesuspendate, tinuta de drum mai buna deoarece deplasarile rotilor nu se influenteaza reciproc, miscarea oscilatiilor de ruliu ale caroseriei si marirea stabilitatii automobilului.
2.3 Elemente elastice metalice
2.3.1 Arcurile din foi
Avantajul principal al arcurilor din foi consta in faptul ca ele pot indeplini singure functiile elementului elastic, dispozitivului de ghidare si a elementului de amortizare. In afara de aceasta arcul din foi are o constructie simpla si se repara usor. Pe langa aceste avantaje, arcurile din foi prezinta si anumite dezavantaje care vor fi prezentate in continuare impreuna cu masurile de inlaturare a lor.
Greutatea sporita, arcul din foi fiind cel mai greu dintre toate elementele elastice. Energia potentiala specifica, adica energia care este inmagazinata de catre elementul elastic la deformarea lui, raportata la volum, este: Eps = 1/6(σ2/E) pentru arcul din foi si: Eps = 1/4(τ2/G) pentru arcul elicoidal sau bara de torsiune. Daca se admite raportul obisnuit dintre modulele de elasticitate G = 0,385. E, atunci cand σ = τ , energia inmagazinata intr-o unitate de volum in cazul arcului elicoidal sau a barei de torsiune, este de patru ori mai mare decat in cazul arcului din foi. In cazul in care τ = 0.85 σ , diferenta va fi de 2,6 ori. Cu cat este mai mica energia potentiala specifica cu atat trebuie sa fie mai mare volumul si respectiv greutatea elementului elastic. Greutatea elementului elastic depinde de patratul efortului unitar admisibil, de acea procedeele de consolidare care permit sa se mareasca eforturile unitare admisibile, conduc la marirea duratei de functionare si la micsorarea greutatii elementului elastic.
Durabilitate redusa, datorita eforturilor unitare initiale, actiunii dinamice si repetate a unor forte si stari complexe de eforturi unitare. S-a stabilit prin incercari ca rezistenta la oboseala a arcului de foi este de patru ori mai mica decat a barei de torsiune. Durabilitatea arcurilor din foi, la automobilele exploatate in conditii rutiere bune, este de 100150 de mii de km.
Foile arcului au in stare libera o curbura diferita si de acea la montare apar in ele eforturi unitare initiale. In acelasi timp arcul din foi care este un element elastic si de ghidare, este solicitat la incovoiere (in planul vertical si orizontal) precum si la rasucire. Cea mai solicitata este foaia principala , din care cauza are o grosime mai mare decat celelalte, iar uneori pentru consolidare se folosesc doua sau trei foi principale.
Pentru a mari durata de functionare a arcurilor din foi se iau urmatoarele masuri: descarcarea arcului de unele forte, reducerea eforturilor unitare, consolidarea arcului (figura 2.2).
In scopul reducerii rasucirii arcului din foi, capetele lui se incastreaza in perne de cauciuc 1, iar prin utilizarea unui opritor suplimentar 2 se limiteaza momentul incovoietor care actioneaza asupra arcului la franare.
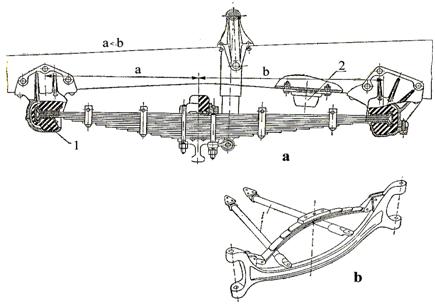
Fig. 2.2 Masuri pentru reducerea solicitarii arcurilor din foi
a-capetele arcului incastrat in perne de cauciuc; b-arcul preia numai sarcini verticale
Reducerea eforturilor unitare in arcul de foi, se poate obtine prin limitarea amplitudinilor oscilatiilor rotii in raport cu caroseria, prin introducerea unor elemente elastice suplimentare (elemente din cauciuc care lucreaza la compresiune, etc.). Eforturile unitare pot fii reduse si prin variatia formei sectiunii transversale a foilor, ceea ce conduce la redistribuirea eforturilor unitare normale. La arcul din foi, partea superioara a sectiunii lucreaza, la intindere, iar partea inferioara la compresiune. Ruperile arcurilor din foi, de cele mai multe ori, se produce datorita oboselii materialului. In cazul eforturilor unitare variabile, eforturile suportate la intindere sunt mai reduse decat la compresiune.
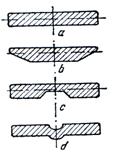
Fig. 2.2 Forma sectiunii foilor pentru arcuri
Datorita acestui fapt, s-au propus sectiuni ale foilor la care eforturile unitare maxime la intindere sunt mai mici decat la compresiune (Fig. 2.2 bis). Sectiunea trapezoidala b) sau cea cu santulet c) au axa neutra deplasata in sus, iar eforturile unitare de intindere scad. O mare parte a producatorilor folosesc varianta cu canelura d), care are rolul de a impiedica deplasarea relativa laterala a foilor.
Distrugerea prin oboseala a foii principale, incepe de obicei cu aparitia focarelor de degradare pe suprafata foii care este solicitata la intindere. In ultimul timp a capatat o raspandire mare consolidarea superficiala cu jet de alice, adesea numai a suprafetei foii principale supusa la intindere. Efectul acestei consolidari creste mult daca intre foile arcului se intercaleaza niste garnituri speciale. Frecarea dintre foi da nastere la niste zone cu eforturi unitare de contact mari, care in conditiile oscilatiilor, provoaca zgarieturi pe suprafetele foilor si in cele din urma conduc la aparitia microfisurilor de oboseala.
Durata de functionare a suspensiei cu arcuri din foi este influentata in mare masura de uzura articulatiilor. Termenul de functionare a articulatiei bolt-bucsa a arcului este de 2-4 ori mai redus decat durata de functionare a arcului insusi. In prezent se tinde ca bucsele din bronz (figura 2.3 a, b) sa fie inlocuite cu bucse din mase plastice care nu necesita ungere, iar la autoturisme se utilizeaza articulatii cu bucse din cauciuc (figura 2.3 c, d). Bucsele montate pe bolt, in stare libera sunt cu 5 mm mai lungi decat in stare montata. La unele solutii constructive se utilizeaza saibele elastice, care asigura un ajustaj strans al bucselor pe bolt si al boltului in suport. La unele automobile, capetele arcului se fixeaza in perne de cauciuc (figura 2.3 e).
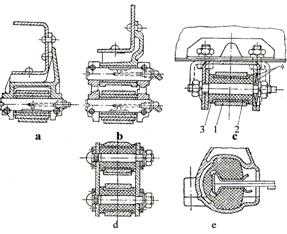
Fig.2.3 Solutii de montare a arcurilor din foi la cadrul automobilului 1-ochi
aer, 2- bucsa din otel, 3- bucsa de cauciuc, 4- saibe elastice.
Caracteristica lineara a arcului din foi constituie un alt dezavantaj, deoarece, asa cum s-a aratat, caracteristica suspensiei este indicat sa fie neliniara. O variatie oarecare a rigiditatii arcului din foi poate fi obtinuta prin montarea corespunzatoare a cercelului. La inclinarea cercelului apare o forta care produce comprimarea foii principale, cea ce conduce la micsorarea rigiditatii arcului din foi. Trebuie aratat insa, ca influenta inclinarii cercelului este relativ mica. Variatia rigiditatii arcului din foi mai poate fi obtinuta prin marirea sau micsorarea lungimii sale de lucru. In fig. 2.3 bis se prezinta solutia la care capetele arcului se reazema liber in suportii 2, iar fortele longitudinale se transmit prin foaia 1. Suportii au o forma profilata care contribuie la modificarea lungimii de lucru a arcului, odata cu modificarea sarcinii utile. La o sarcina mai mare, corespunde lungimea l > l0, adica si o rigiditate mai mare.
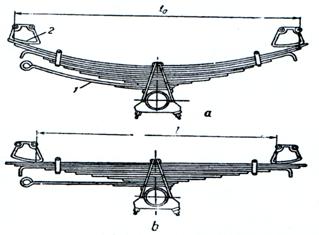
Fig.2.3 Arcuri din foi cu rigiditate variabila
a) Automobil fara sarcina utila b) Automobile cu sarcina utila
2.3.2. Arcurile elicoidale si barele de torsiune
Arcurile elicoidale si arcurile bara de torsiune prezinta o serie de avantaje fata de arcurile din foi si anume: lucrul mecanic specific mai mare si, ca urmare, durabilitate mai mare si greutate mai redusa, lipsa frecarii din elementul elastic, nu necesita intretinere in exploatare, o executie mai simpla.
Arcurile bara de torsiune, in comparatie cu arcurile elicoidale, au o constructie mai complicata, dispunerea pe automobil este mai incomoda si de asemenea au o durabilitate mai mica. In schimb prezinta avantajul unei greutati minime a maselor nesuspendate ale automobilelor ( bara de torsiune facand parte din partea suspendata) si a unei distributii mai favorabile a sarcinilor pe cadru (la dispunerea longitudinala a barei de torsiune).
Deficienta principala a arcurilor elicoidale si a barelor de torsiune consta in faptul ca ele nu preiau fortele transversale si longitudinale, necesitand elemente separate de ghidare. Din aceasta cauza, cu toata simplitatea constructiva a elementelor elastice, suspensiile rezulta in ansamblu mai complexe, atat in ce priveste constructia, cat si intretinerea, fata de arcurile din foi. In afara de aceasta si arcurile elicoidale si cele bara de torsiune au caracteristici elastice lineare.
Arcurile elicoidale ale suspensiei se executa din bare de otel de sectiune circulara (figura 2.4). La dispozitivele de ghidare cu un brat si cu doua brate arcul elicoidal se sprijina de obicei pe bratul inferior. In cazuri mai rare se intalneste dispunerea superioara sau orizontala a arcului elicoidal. In general arcurile elicoidale se utilizeaza ca element elastic principal. La unele suspensii, arcul elicoidal este utilizat si ca element elastic suplimentar.

Fig.2.4 Arcuri elicoidale suspensie
Arcurile bara de torsiune pot fi dispuse longitudinal sau transversal. Pentru ca suspensia sa aiba o rigiditate mica, este necesar ca arcul bara de torsiune sa aiba o lungime mare.
Arcurile bara de torsiune pot fi: sub forma unei singure bare de torsiune, cu sectiune circulara sau dreptunghiulara sau mai multe bare cu sectiune circulara sau lamelara suprapuse (figura 2.5).
In figura 2.5 este reprezentat un arc bara de torsiune cu sectiune circulara, amplasat longitudinal.
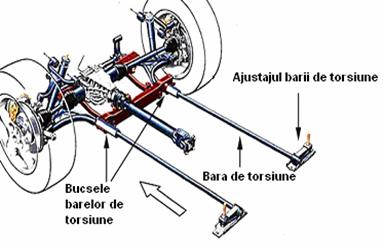
Fig 2.5 Arcuri bara de torsiune dispuse longitudinal la
autoturismul de teren Mercedes Benz ML320
Inlocuirea arcului bara de torsiune cu sectiune circulara cu cel lamelar permite sa se micsoreze rigiditatea in medie cu circa 15-20 %, la o marire a greutatii arcului de bara. De asemenea la ruperea unei lamele arcul nu este scos instantaneu din functiune.
Solicitarea admisibila la deformatia maxima este de 6000-7000 daN/cm2 pentru arcurile bara de torsiune.
2.4. Elemente elastice nemetalice
2.4.1 Elementele elastice din cauciuc
Elementele elastice din cauciuc care lucreaza la compresiune se utilizeaza in general ca arcuri suplimentare, contribuind la imbunatatirea confortului si la marirea durabilitatii arcurilor principale. Suspensia cu elemente elastice din cauciuc prezinta avantajele : constructie simpla, greutate redusa, caracteristica neliniara, intretinere simpla. Principalele dezavantaje ale arcurilor din cauciuc se refera la modificarea caracteristicii elastice datorita imbatranirii si dependenta nefavorabila a modulului de elasticitate de temperatura.
Utilizarea arcurilor din cauciuc, la suspensiile mixte, permit reducerea numarului de foi ale arcului principal, precum si unificarea arcurilor din foi folosite ca element elastic principal.
In figura 2.6 este prezentat un arc cav din cauciuc, denumit uneori si arc aeon, dupa numele celei mai mari firme producatoare. Acesta este caracterizat printr-o capacitate de incarcare mare. Arcul cu doua sau mai multe sectiuni se utilizeaza in cazul unor sageti mari. Arcurile cu mai multe sectiuni (etaje) trebuie ghidate pentru a evita flambajul.
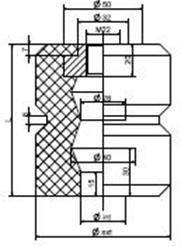
Fig. 2.6 Arc din cauciuc
La sageti de ordinul a 4070 mm arcurile din cauciuc prezinta o rigiditate comparabila cu rigiditatea elementului elastic principal, iar la o crestere ulterioara a deformatiei se poate obtine o marire a rigiditatii ca si la tamponul obisnuit din cauciuc. Se recomanda ca deformatia maxima sa nu depaseasca 5055 la suta din inaltimea arcului cav, deoarece la o deformatie de 2/3 din inaltime, durabilitatea scade mult.
Deoarece pentru arcurile cave din cauciuc nu exista stabilita o metodica de calcul a dimensiunilor si a caracteristicii elastice, acestea se aleg dupa caracteristica indicata de firma producatoare, in functie de necesitatile suspensiei.
Arcurile de cauciuc lucrand la torsiune, intalnite si sub denumirea de arcuri metal cauciuc, au cauciucul vulcanizat intre suprafetele cilindrice a doua tuburi metalice, asezate concentric. La proiectare se are in vedere ca eforturile unitare sa fie cat mai uniforme.
2.4.2 Elementele elastice pneumatice
La suspensia pneumatica, arcurile metalice sunt inlocuite cu elemente elastice pneumatice. Acest tip de suspensie prezinta urmatoarele avantaje:
caracteristica elastica neliniara, permite reglarea automata a nivelului caroseriei fata de sol;
- au caracteristica parabolica, ceea ce le permite sa se micsoreze spatiul destinat pentru jocul suspensiei si deci exista posibilitatea coborarii centrului de masa;
stabilizarea caroseriei in viraj;
- atenuarea zgomotelor deoarece nu exista legaturi metalice intre roti si partea suspendata;
- greutatea proprie mai redusa, mai ales cand automobilul dispune de o sursa de aer comprimat.
Datorita acestor avantaje, suspensia pneumatica a inceput sa fie tot mai mult utilizata in locul celei mecanice, in special pentru autovehiculele de transport care ruleaza pe autostazi sau pe sosele cu stare de intretinere buna (pentru care nu este necesara o garda la sol marita).
Se deosebesc mai multe tipuri de elemente elastice pneumatice, si anume elementul pneumatic de tip burduf (figura 2.7)format dintr-o tesatura de nailon cauciucata, avand intre fiecare etaj cate un inel de otel care limiteaza deformarile radiale. La capete elementul elastic este prevazut cu cate un talon pentru fixare. Acest element elastic este construit pentru o presiune maxima de 7 atm, iar presiunea de explozie este de 35 atm.

Fig. 2.7 Suspensie cu element pneumatic de tip cu burduf
Un alt element elastic pneumatic este cel de tip diafragma (figura 2.8), compus in principiu dintr-un cilindru, legat de partea suspendata a automobilului si dintr-o armatura (piston), legata de partea nesuspendata. Aceste doua parti sunt unite printr-o diafragma care se infasoara sau desfasoara pe armatura in functie de pozitia relativa a cilindrului fata de armatura. Prin modificarea formei cilindrului sau a armaturii se poate obtine o modificare a suprafetei efective, respectiv a caracteristicii elastice.
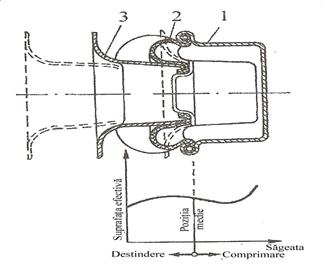
Fig. 2.8 Suspensie cu element pneumatic de tip diafragma
Suspensia "Airlift Suspension System" este un kit de suspensie care mareste garda la sol a modelelor precum Porsche 911 si Audi R8, pentru a facilita depasirea unor obstacole mici.
Marirea garzii la sol a masinii cu 55 milimetri, ii permite soferului sa urce pe borduri sau sa treaca peste mici obstacole care pun probleme masinilor sport cu garda la sol redusa (figura 2.9).

Fig. 2.9 Marirea garzii la sol la autoturismul Porsche 911
Sistemul ridica si coboara garda la sol in mod automat printr-un sistem nou, patentat de catre o firma germana. Sistemul va sti sa coboare la loc masina atunci cand soferul depaseste viteza de 50 km/h.
Kit-ul de suspensie este disponibil in doua versiuni, una care contine si o suspensie Bilstein B16, precum si o versiune care se monteaza deasupra suspensiei reglabile cu care modelele pleaca din fabrica.
Sistemul de suspensie pneumatica semi-activ, AIRMATIC DC (cu control dublu) combina confortul si sportivitatea. Functioneaza cu arcuri pneumatice, care, in functie de situatia de conducere, pot fi reglate electronic pentru o configuratie mai ferma si mai maleabila. Tendintele de inclinare si rasturnare pot fi reduse pe timpul virajelor in viteza.
Sistemul de suspensie pneumatica cu control electronic include de asemenea sistemul de amortizare adaptiv (ADS). In timp ce sistemul AIRMATIC DC se adapteaza la diferite situatii si stiluri de conducere, sistemul ADS adapteaza automat forta amortizoarelor pentru fiecare roata. Conducatorul automobilului poate, de asemenea, regla singur suspensia si amortizarea. Cu ajutorul unui intrerupator din consola centrala, se poate alege intre moduri de reglare a suspensiei: "confortabil", "confortabil sport" si "sport".
Sistemul AIRMATIC cu control dublu (AIRMATIC DC) fig.2.10 este dotare standard la modelele CLS 500 si CLS 63 AMG. Sistemul este disponibil ca dotare optionala pentru modelele cu 6 cilindri.
Fig. 2.10 Suspensie pneumatica AIRMATIC DC
Standard pentru ML 420 CDI, ML 500 si ML 63 AMG, pachetul AIRMATIC este disponibil ca dotare optionala pentru celelalte modele. Include suspensii pneumatice fata si spate cu control al nivelului. Astfel confortul este mai ridicat pentru ca autoturismul este mentinut tot timpul la un nivel constant, chiar si atunci cand este incarcat.
In acelas timp, sistemul Adaptive Damping System (ADS) asigura cea mai placuta calatorie reducand tangajul si ruliul si amortizand fiecare roata individual, in functie de situatie. Puteti alege intre modurile "Auto", "Sport" si "Confort" (figura 2.11).

Fig. 2.11 Comanda optiunilor sistemului ADS
Suspensia pneumatica controlata electronic (ECS) ofera un confort de inalta clasa si protejeaza incarcatura. Sistemul se ajusteaza automat astfel ca autocamionul ramane la o inaltime constanta si compenseaza incarcatura care nu este distribuita uniform. Controlul manual al inaltimii sasiului face mai usoara ajustarea nivelului platformei de incarcare astfel incat sa se potriveasca cu cea a rampei. Sistemul poate chiar fi programat pentru mai multe inaltimi alternative ale platformei. ECS este disponibila in doua versiuni: complet pneumatic, sau suspensie pneumatica doar pentru puntea spate.
Pentru cele mai mari sarcini totale, boghiul Tridem cu suspensie pneumatica, puntea portanta si directoare amplasata in spatele puntii motoare (tag) este caracteristic camioanelor pentru constructii. Tridem se caracterizeaza printr-o stabilitate crescuta si o manevrabilitate foarte buna chiar si in conditii dificile. O punte directoare portanta in combinatie cu un ampatament mic face ca autocamionul sa fie usor de manevrat si va avea o raza mica de virare.
In cazul autocamioanelor Volvo FH, sistemul automat de reglare a inaltimii mentine camionul constant la aceeasi inaltime fata de suprafata de rulare (figura 2.12). Pe langa aceste avantaje, sistemul de reglare manuala a inaltimii platformei ajuta la efectuarea rapida a operatiunilor de incarcare si de descarcare. Telecomanda ii permite soferului sa programeze inaltimea rampei de incarcare, fapt care usureaza munca.

Fig. 2.12 Suspensia pneumatica a autocamioanelor Volvo FH
Sistem de suspensie pneumatica cu senzor integrat ContiTech Air Spring Systems a prezentat impreuna cu producatorul de punti BPW un sistem de suspensie pneumatica ce lucreaza cu un senzor integrat fara contact pentru masurarea inaltimii si a presiunii. In felul acesta, compania creeaza premisele tehnice pentru utilizarea sistemelor de suspensie pneumatica reglate electronic prin electrovalve. Astfel, in curand si trailerele se vor putea bucura de avantajele rezervare pana acum doar autoturismelor cu suspensii pneumatice: pierderi mai mici de aer, reglare mai exacta a nivelului de mers, configurarea mai multor nivele modificabile in functie de preferinte.

Fig. 2.13 Sistem ContiTech Air Spring Systems
2.5Amortizoare
2.5.1 Destinatia, conditiile impuse si clasificarea lor
Amortizorul este destinat pentru amortizarea oscilatiilor verticale ale caroseriei si ale rotilor automobilului, prin transformarea energiei mecanice a oscilatiilor in energie termica. Amortizorul se monteaza, in suspensia automobilului, paralel cu elementul elastic principal (figura 2.14). La automobilele moderne, amortizoarele cele mai utilizate sunt cele hidraulice telescopice. Corpul amortizorului, umplut cu lichid, se monteaza pe partea nesuspendata a puntii, iar pistonul de partea suspendata. In timpul functionarii amortizorului, se distinge cursa de comprimare si cursa de destindere, cand lichidul trece dintr-o camera in alta a corpului amortizorului, prin niste supape si orificii calibrate, practicate in piston, realizand prin aceasta, frecarea lichida necesara amortizarii.

Fig. 2.14 Ansamblul dispunerii amortizorului hidraulic
Conditiile principale impuse amortizorului sunt:
sa asigure o amortizare corespunzatoare a oscilatiilor caroseriei si rotilor automobilului;
- sa aiba o functionare stabila in conditii de drum si de temperatura;
sa aiba greutate si dimensiuni de gabarit cat mai reduse;
durata de functionare sa fie cat mai mare;
posibilitatea de dispunere comoda in cadrul suspensiei;
constructie simpla si ieftina.
Amortizorul trebuie sa asigure o amortizare diferentiata a oscilatiilor astfel:
- cresterea amortizarii odata cu cresterea vitezei de oscilatie, in scopul eliminarii oscilatiilor caroseriei si a maselor nesuspendate datorite neregularitatilor succesive ale drumului;
amortizarea redusa a oscilatiilor la deplasarea automobilului pe drumuri cu neregularitati mici;
limitarea sarcinilor care se transmit caroseriei prin amortizor.
Utilizarea unor amortizoare necorespunzatoare prezinta urmatoarele dezavantaje:
reduc sau anuleaza temporar sarcina pe roata favorizand alunecarea sau patinarea rotii la franare sau demarare;
creste posibilitatea de derapare si se inrautateste tinuta de drum, creste foarte mult uzura pneurilor;
- ruperea unor elemente ale suspensiei sau ale cadrului (caroseriei) in punctele de prindere.
Amortizoarele hidraulice se calsifica ca in figura 2.15.
Amortizoarele hidraulice se impart in amortizoare telescopice si amortizoare cu parghii.
Amortizorul cu parghie lucreaza cu presiuni care pot ajunge pana la 250-400 daN/cm2, fata de 60-80 daN/cm2 la amortizorul telescopic. Amortizoarele telescopice sunt mai usoare decat cele cu parghie de aproape doua ori, sunt mai simple, au o durabilitate mai mare de functionare si o stabilitate mai mare. In cazul unei montari corespunzatoare, amortizorul telescopic mareste stabilitatea caroseriei. Amortizoarele cu parghie sunt din ce in ce mai des inlocuite datorita si eforturilor mari la care sunt supuse atat ele, cat si elementele lor de fixare.
Fig. 2.15 Tipuri de amortizoare hidraulice
2.5.2 Constructia amortizoarelor hidraulice telescopice
Asa cum s-a aratat, amortizoarele hidraulice telescopice se clasifica in amortizoare monotubulare si bitubulare. Cele mai folosite sunt amortizoarele bitubulare, care in comparatie cu cele monotubulare au o lungime mai redusa, iar inelul de etansare nu este supus presiunii ridicate a lichidului.
Amortizoarele telescopice bitubulare au 2 camere umplute cu ulei, spatiul
de lucru in care se misca pistonul si biela motoare, respectiv spatiul de
depozitare care se afla intre cilindrul lucrator si tubul recipientului.Spatiul
de depozitare este pe 2/3 umplut cu ulei. Amortizarea pentru
treapta de tractiune o preia supapa cu piston. Amortizorul bitubular poate funtiona si cu amortizor cu gaz, unde
presiunea este de 6 pana la 8
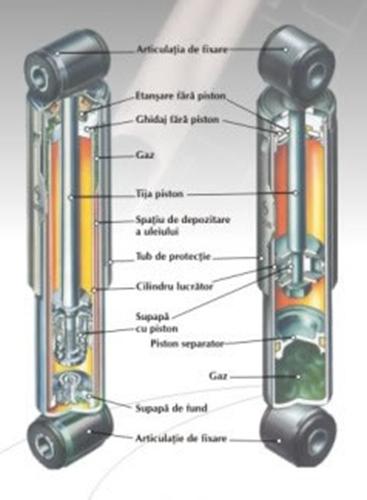
Fig. 2.16 Compunerea amortizoarelor bitubulare Sachs
Amortizoarele telescopice monotubulare
Amortizoarele telescopice monotubulare (figura 2.17) in comparatie cu cele bitubulare au, la un diametru exterior egal, un diametru al pistonului mult mai mare (pana la 50 la suta), sunt mai usoare cu 25-30 la suta si au o racire mai buna. In schimb amortizorul monotubular este mai sensibil la socurile produse de neregularitatile drumului.

Fig. 2.17 Amortizor monotubular
Amortizoarele telescopice monotubulare pot fii cu presiune joasa si cu presiune ridicata in camera de compensare (hidropneumatice).
Amortizoarele telescopice monotubulare au camera de compensare dispusa axial, in prelungirea camerei de lucru. Lichidul si aerul din camera de compensare pot fi separate intre ele sau in contact direct.
Amortizoarele telescopice hidropneumatice
Caracteristica principala a amortizorului hidropneumatic consta in existenta unei camere de compensare care contine gaz comprimat. Fata de amortizoarele hidraulice telescopice bitubulare, prezinta urmatoarele avantaje:
constructie simplificata;
- diametrul pistonului mult mai mare, ceea ce duce la micsorarea presiunii lichidului;
- racirea mai buna deoarece tubul principal este in contact direct cu aerul din exterior;
lipsa bulelor de aer, lichidul fiind supus presiunilor inalte a gazului;
socurile mici sunt practic amortizate de perna pneumatica a camerei de compensare, greutate mai redusa.
In figura 2.18 se prezinta constructia amortizorului hidropneumatic Die Carbon, care are in camera de compensare azot sub presiune de 25 bar.
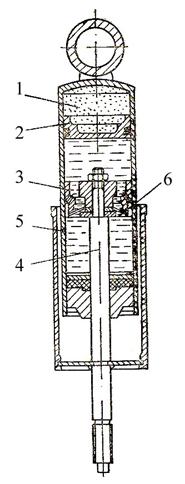
Fig. 2.18 Amortizor hidropneumatic
1-camera de compensare; 2-piston flotant; 3-piston principal;
4-tija; 5-tub; 6-saiba flotanta
Amortizoarele telescopice reglabile
Posibilitatea modificarii caracteristicii de amortizare permite folosirea aceleiasi tipodimensiuni de amortizor la automobile diferite, precum si refacerea reglajului initial dupa parcurgerea unui anumit numar de kilometri.
La un amortizor hidraulic telescopic, modificarea caracteristicii de amortizare, atat pentru cursa de comprimare cat si pentru cursa de destindere, se poate realiza prin: modificarea dimensiunilor orificiilor calibrate din rondela obturatoare a supapei de descarcare, modificarea fortei de precomprimare a arcului supapei sau modificarea simultana a mai multor parametri.
Trebuie aratat ca desi numarul amortizoarelor reglabile patentate este foarte mare, numai cateva dintre ele se executa in serie. Dintre acestea amortizorul KONI (figura 2.19), cu reglare manuala, este cel mai raspandit in Europa. Reglarea se realizeaza prin rotirea unei piulite 8, in raport cu tija pistonului, modificand prin aceasta forta arcului 7 precum si dimensiunile orificiilor 3.
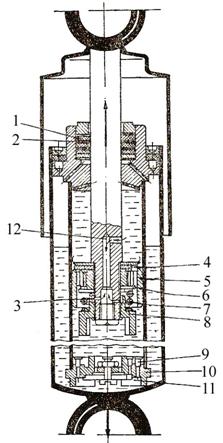
Fig. 2.19 Amortizor bitubular KONI
1-inele de cauciuc; 2-garnituri din fibra; 3-orificii calibrate; 4-supapa de comunicare; 5-piston; 6-rondela; 7-arc; 8-piulita; 9-supapa de admisie;
10-corp supapa de comprimare, 11- supapa de comprimare; 12-canal
2.6. Tipuri constructive de suspensii utilizate la automobile
2.6.1 Suspensii dependente
Dupa cum s-a aratat, suspensia cu roti dependente se intalneste in cazul puntilor rigide. In majoritatea cazurilor, suspensia cu punte rigida foloseste arcurile cu foi dispuse longitudinal datorita constructiei mai simple. Sunt insa si automobile cu punte rigida care utilizeaza arcurile elicoidale.
Suspensia din fata spre deosebire de cea din spate trebuie sa asigure si o functionare corecta a mecanismului de directie. Daca dispunerea mecanismului de directie in raport cu arcul din fata nu este corecta, rotile de directie vor oscila in ritmul si cu pulsatia oscilatiilor verticale ale arcurilor suspensiei. La proiectare trebuie avuta in vedere dependenta dintre puntea din fata, sistemul de directie si suspensie.
La deformarea arcului1 (figura 2.20a) punctul de articulatie O1, dintre extremitatea anterioara a barei longitudinale de directie 2 si bratul fuzetei, este constrans sa efectueze simultan o miscare pe cercul aa cu centrul in O2 si o miscare pe cercul bb cu centrul in O3. Cum aceste cercuri sunt divergente, punctul O1 va trebui sa urmeze traiectoria bb deoarece bara 2 este articulata in punctul O3 (fix pentru o anumita pozitie a volanului), iar bratul fuzetei care se poate roti in jurul pivotului sau da nastere la oscilatia rotilor de directie, in ritmul si cu pulsatia oscilatiilor verticale ale arcului suspensiei.
Reducerea oscilatiilor rotilor la aceasta solutie se realizeaza prin dispunerea barei de directie si a bratului fuzetei, astfel incat O1, O2 si O3 sa fie coliniare. Neconcordanta dintre traiectoriile aa si bb se compenseaza prin montarea unor arcuri mai putin rigide la capetele de bara pentru a permite o anumita lungire a distantei dintre boltul levierului de directie si boltul bratului fuzetei.
La unele automobile capatul din fata al arcului se fixeaza printr-un cercel C (figura 2.20b), ceea ce duce la o reducere a oscilatiei rotilor de directie, deoarece cele doua cercuri sunt tangente interior si in zona de lucru sunt foarte apropiate.
In cazul in care caseta de directie este deplasata mult in fata (figura 2.20c), cele doua cercuri aa si bb sunt de asemenea tangente interior, ceea ce reduce oscilatiile rotilor de directie.
Suspensii dependente cu arcuri cu foi
Suspensia cu arcuri cu foi semieleiptice dispuse longitudinal este prezentata in figura 2.21. Acest tip de suspensie este cel mai raspandit la automobilele cu punte rigida, la care caracterul deplasarilor puntii automobilului fata de caroserie este determinat de parametrii arcului, care indeplineste si functia de element de ghidare.
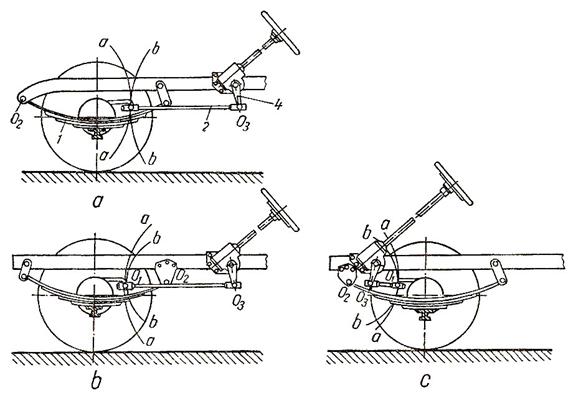
Fig. 2.20 Dependenta cinematicii rotilor de directie de suspensia dependenta, la mersul in linie dreapta
Unul din capetele arcului trebuie sa fie fixat de cadru printr-o articulatie simpla 1, pentru ca aceasta sa poata transmite fortele de tractiune si franare. Celalalt capat este fixat prin intermediul unui cercel 6, care permite arcului sa se deformeze sub actiunea sarcinilor.
Suspensia cu arc din foi suplimentar se utilizeaza mai ales la puntea din spate a autocamioanelor. Necesitatea folosirii unei astfel de suspensii rezulta din cauza variatiei mari a sarcinii care revine puntii din spate la circulatia autocamionului gol si incarcat. O suspensie corespunzatoare pentru cazul cand autocamionul este incarcat va fi prea rigida pentru autocamionul gol. Pentru a realiza o suspensie care sa corespunda pentru ambele cazuri se foloseste suspensia cu arc din foi suplimentar (figura 2.22). Arcul principal 3 lucreaza la sarcini mici si mijlocii iar la sarcini mari incepe sa lucreze si arcul suplimentar 2 (care se sprijina pe suportii 1 ai cadrului), marind mult rigiditatea suspensiei.
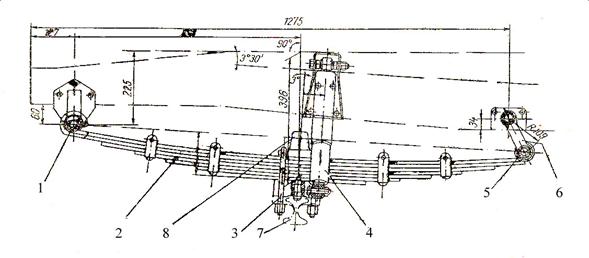
Fig. 2.21 Suspensie cu arcuri din foi semieleiptice
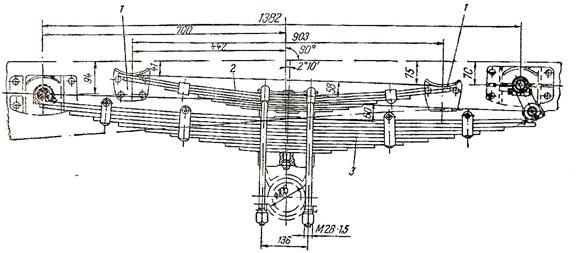
Fig. 2.22 Suspensie cu arc din foi suplimentar
In figura 2.23 se prezinta suspensia cu arcuri din foi de tip balansier, utilizata la puntile din spate ale automobilelor cu trei punti. Aceasta solutie permite deplasarea libera in planul vertical a puntilor, asigurand posibilitatea dezaxarii lor relative, in scopul mentinerii contactului dintre roti si drum. Legatura dintre arc si cadru se realizeaza prin intermediul tijelor balansoare 1 si 3. Puntile din spate formeaza un carucior comun care oscileaza, impreuna cu arcurile, in jurul axului 2.
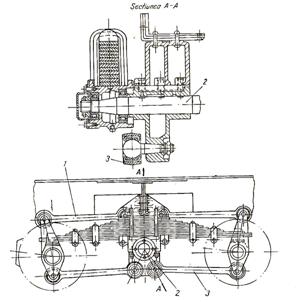
Fig. 2.23 Suspensia cu arcuri din foi de tip balansier
In figura 2.24a se prezinta suspensia cu arcuri din foi de tip Scchomacker care prezinta o caracteristica lineara progresiva (figura 2.24b). Particularitatile solutiei constau in folosirea arcului suplimentar 3, montat in consola pe cadru, pe care se sprijina capatul liber 2 al arcului principal 1. Rola 4 impiedica desprinderea arcului principal de arcul suplimentar.
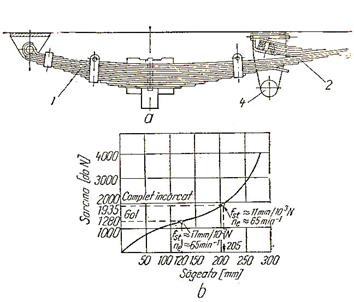
Fig.2.24 Suspensie tip Schomacker
Suspensii depenedente cu arcuri elicoidale
Tendinta actuala este de a inlocui arcurile din foi ale suspensiilor dependente cu arcuri elicoidale.
In figura 2.25 se prezinta suspensia puntii din fata (Mac Pherson) a unui automobil. Arcurile elicoidale sunt fixate cu capetele superioare pe reazeme speciale ale caroseriei iar capetele inferioare pe suporti montati pe punte. Datorita faptului ca arcurile elicoidale preiau numai sarcini verticale, puntea este prevazuta cu un dispozitiv de ghidare compus din brate laterale si brat superior. Stabilizatorul transversal limiteaza inclinarea transversala a autoturismului la deplasarea in viraj. Suspensia cu arcuri elicoidale este prevazuta in mod obligatoriu cu amortizoarele telescopice si tampoanele limitatoare din cauciuc.

Fig. 2.25 Suspensie fata Mac Pherson
In figura 2.26 se prezinta suspensia dependenta cu arcuri elicoidale a unei punti din spate nemotoare.
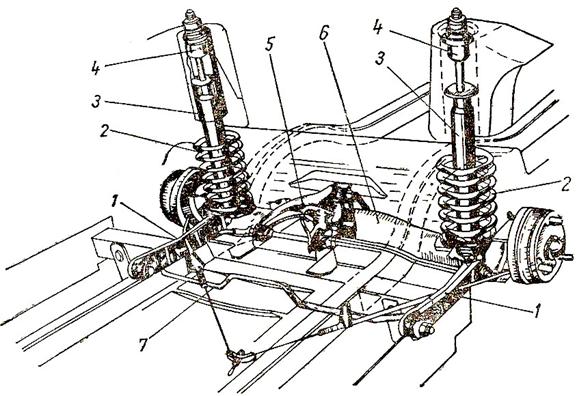
Fig. 2.26 Suspensia spate a unei punti nemotoare
1-brate laterale; 2-arcuri elicoidale; 3-amortizoare telescopice;
4-tampoane limitatoare din cauciuc; 5-brat superior; 6-punte;
7-stabilizator transversal
2.6.2 Suspensii independente
Se intalnesc mai multe tipuri constructive de suspensii cu roti independente care se deosebesc dupa posibilitatile de oscilare ale rotilor sau dupa tipul elementului elastic folosit (figura 2.27).
Suspensia cu oscilatia rotilor in planul transversal cu un brat prezinta un mare neajuns la trecerea rotilor peste o denivelare de o inaltime h, deoarece se produce inclinarea ei cu unghiul λ si in acelasi timp are loc o marire a ecartamentului cu ∆l. Acest lucru conduce la o alunecare laterala a rotii si la modificarea unghiurilor de inclinare ale rotii si pivotului, inrautatind tinuta de drum a automobilului. De asemenea se produce o uzura rapida a pneului si micsorarea stabilitatii laterale roti.
Pentru a diminua deficientele aratate s-au construit suspensii cu un brat, la care axa de oscilatie este dispusa sub un anumit unghi fata de axa longitudinala a automobilului, astfel incat rotile pot oscila atat in plan transversal cat si in plan longitudinal.
Suspensia cu oscilatia rotilor in planul transversal cu doua brate poate fii de doua tipuri si anume cu brate egale si cu brate inegale.
Suspensia cu brate egale exclude total variatia inclinarii planului rotii, insa nu si variatia rotii ecartamentului ∆l.
In cazul suspensiei cu brate inegale, la o ridicare maxima a rotii cu h, unghiul λ nu are o valoare mai mare de 5-6 grade, la care momentul giroscopic este amortizat de catre momentul fortelor de frecare din sistem.
Fig. 2.27 Tipuri de suspensii independente
Suspensia cu oscilatia rotilor in planul longitudinal al automobilului (cu unul sau doua brate) este folosita mai ales pentru rotile motoare. La trecerea peste denivelari ecartamentul automobilului ramane neschimbat.
Suspensia cu oscilatia verticala a rotilor da posibilitatea fuzetei fiecarei roti sa se deplaseze vertical pe un pivot fixat rigid de caroserie. La alte variante, roata se deplaseaza impreuna cu fuzeta intr-un locas adecvat din structura autoturismului. Solutia se utilizeaza la rotile de directie si prezinta avantajul invariatiei ecartamentului precum si a mentinerii constante a unghiurilor pivotului.
Suspensii independente cu trapez transversal cu arcuri elicoidale sunt cele mai raspandite la puntea din fata a autoturismelor. In figura 2.28 este prezentata constructia unei suspensii independente pentru puntea fata a autoturismului Suzuki.

Fig. 2.28 Suspensie independenta fata Suzuki
Exista suspensii independente cu trapez transversal si arcuri elicoidale utilizate la puntea din fata fara pivot. Acest tip de suspensie prezinta urmatoarele avantaje:
Suspensiile independente cu arcuri din foi au arcul 1 dispus transversal fata de axa automobilului si fixat la mijoc de cadrul 2. Bratul inferior al suspensiei este constituit catre jumatate din arcul 1.
Suspensia independenta cu bare de torsiune (figura 2.29).
La aceasta suspensie elementele elastice le constituie barele de torsiune montate paralel cu axa automobilului. Barele de torsiune sunt montate cu un capat in leviere, iar cu celalalt capat in traversa fixata de caroserie. Fixarea barelor se face prin intermediul canelurilor ce se gasesc la ambele capete.

Fig. 2.29 Suspensia independenta cu bare de torsiune
2.7 Materiale utilizate la confectionarea arcurilor
Otelurile folosite pentru arcuri sunt atat oteluri carbon de calitate(OLC 55A,OLC65A, OLC75A), cat si oteluri aliate cu Si siliciu, Mn mangan,Cr crom si V vanadiu.
Arcurile din foi se confectioneaza din oteluri de arc silicioase, din oteluri de arc manga-siliciu, crom-siliciu-vanadiu si crom-mangan.
Arcurile elicoidale sunt confectionate din bare de otel arc.
Arcurile bara de torsiune sunt executate din oteluri de arc aliate.
Continutul ridicat de carbon din otelurile pentru arcuri (0,50,9 %), asigura acestora proprietati elastice ridicate. Otelurile cu siliciu au o limita de curgere ridicata, asigurand pentru arcuri proprietati elastice superioare. Manganul contribuie la reducerea decarburarii superficiale la incalzire.
2.8 Calculul elementelor suspensiei
Carcteristica elastica a suspensiei (figura 2.30) reprezinta dependenta dintre sarcina verticala pe roata si deformatia suspensiei. Cu ajutorul ei se apreciaza elementul elastic al suspensiei, utilizand urmatorii parametri: sageata statica fst; sagetile dinamice fd1 si fd2 pana la limitatorul inferior si limitatorul superior; coeficientul dinamic kd si fortele de frecare.
Curbele de comprimare si destindere nu coincid din cauza frecarii dintre elementele suspensiei. Drept caracteristica a suspensiei se considera i mod conventional linia medie (intrerupta). Sageata statica se determina ducand prin punctul corespunzator sarcinii statice o tangenta la curba medie. In cazul autofurgonetelor sageata statica este indicat a avea valori intre 80.140 mm. Pentru asigurarea unui mers lin al automobilului, fara oscilatii in planul longitudinal, trebuie ca raportul dintre sagetile statice ale suspensiei posterioare fst2 si suspensiei anterioare fst1 sa fie intre limitele 1,0.1,2.
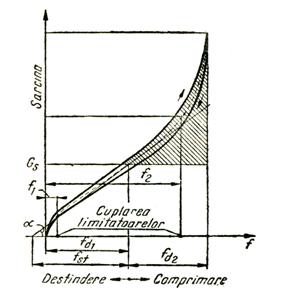
Fig. 2.30 Caracteristica elastica a suspensiei
Coeficientul dinamic este definit de raportul dintre sarcina maxima ce se transporta prin suspensie Fmax si sarcina statica Gs:
Kd = Fmax/Gs (2.1)
Se recomanda pentru autovehicule care circula pe drumuri cu neregularitati valori cuprinse intre 2.3. Incadrarea intre aceste limite conduce la evitarea loviturilor in limitatori. Am adoptat valoarea Kd = 2,5.
Sageata dinamica fd trebuie sa aiba valori mari pentru a se imbina mersul lin al automobilului cu un coeficient dinamic mare, asigurandu-se un contact permanent al rotilor cu drumul.. Totusi, marimea acestuia este limitata de cresterea deplasarilor caroseriei in raport cu rotile, fapt care conduce la scaderea stabilitatii automobilului si ingreunarea manevrabilitatii directiei. Din aceste motive, sagetile dinamice pentru autofurgonete se recomanda a avea valori in jur de 1,0 .
Pentru a se obtine o caracteristica a suspensiei cat mai apropiata de caracteristica optima se utilizeaza elemente elastice suplimentare. Acestea servesc fie pentru marirea coeficientului dinamic, fie pentru limitarea domeniului de variatie a sagetii statice. Caracteristica elastica optima, cu mentinerea constanta a sagetii efective si deci a frecventei proprii, se obtine prin folosirea suspensiilor pneumatice si hidropneumatice cu reglarea automata a gardei la sol.
Pentru autofurgoneta din tema de proiect am optat pentru o suspensie independenta cu elemente metalice: arc elicoidal si amortizor pnematic pentru puntea din fata, respectiv arcuri din foi lamelare pentru puntea din spate.
2.8.1Calculul arcurilor din foi lamelare
Calculul la actiunea sarcinilor dinamice maxime, se face in regimul demararii si al franarii automobilului. Indiferent de regim, arcul preia atat fortele cat si momentele reactive. Eforturile unitare depind de modul de transmitere a fortelor si a momentelor de la punte la cadru, precum si de regimul de deplasare al automobilului, dupa cum urmeaza:
a) In regim de demarare (figura 2.31) :
Zr = G2 .kd/2 (2.2)
Zr = 30170. 2,5/2 = 377125 N
Xd = Zr .j = 377125. 0,8 = 301700 N
RA = Zr.(l2 + j.b)/l (2.3)
RA = 377125. (290 + 0,8. 1000)/580 = 708735 N
RB = Zr.(l1 - j.b)/l (2.4)
RB = 377125. (290 - 0,8. 1000)/580 = 331610 N]
b) In regim de franare
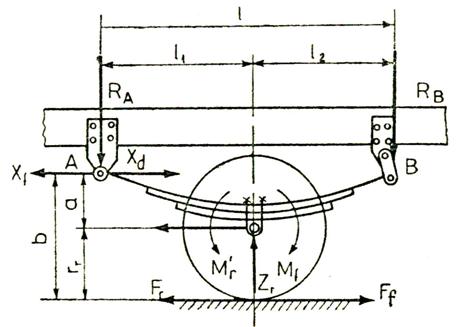
Valorile
fortelor Zr ,respectiv Xd sunt aceleati ca si in cazul
precedent, se inverseaza doar relatiile de calcul pentru rezultand: RA
= 331610 N, respectiv RB =
708735 N.
Fig. 2.31 Schema transmiterii fortelor de la punte la cadru in cazul arcurilor cu foi lamelare
2.8.2Calculul amortizoarelor hidraulice telescopice
Pentru autovehiculul din tema de proiect am optat pentru amortizoare telescopice monotubulare .
Calculul amortizorului telescopic cuprinde determinarea caracteristicii de amortizare, stabilirea dimensiunilor constructive de baza si determinarea parametrilor orificiilor de scurgere si ai supapelor.
Pentru determinarea caracteristicii de amortizare trebuie sa se stabileasca domeniul necesar de amortizare pentru caroserie si pentru roti. Domeniul necesar de amortizare se determina cu relatia caracteristicii liniare de amortizare:
Fa = c1. Vp2 (2.5)
relatie in care coeficientul c1 reprezinta coeficientul de rezistenta al amortizorului si are valoarea pentru autofurgoneta c1 = 2060 N. s/m.
Dimensiunea principala constructiva a amortizorului este diametrul pistonului dp, care trebuie astfel ales incat presiunea maxima a lichidului si incalzirea amortizorului sa nu depaseasca valorile recomandate.
Conform standardelor in vigoare, la suspensiile autovehiculelor, sectiunea minima necesara a pistonului Sp se determina cu relatia:
Sp = 2. 10-3. i. Gs [cm2] (2.6)
relatie in care:
Gs reprezinta greutatea suspendata;
i - raportul de transmitere al dispunerii amortizorului (i = 2).
Sp = 2. 10-3. 2. 754 = 3,016 [cm2
Tinand seama ca S = p. D2/4 obtinem:
D = (4.Sp/p)1/2 = (4. 301,6/3,14)1/2 = 20 [mm]
Luand in consideratie relatiile dintre dimensiunile pistonului si dimensiunile celorlalte elemente componente ale amortizorului obtinem:
Diametrul tijei = 20. 0,49 = 9,8 [mm];
Diametrul exterior al tubului rezervor = 20. 1,62 = 32,4 [mm];
Lungimea ghidajului = 20. 0,41 = 8,2 [mm];
Lungimea pistonului = 20. 0,66 = 13,2 [mm]
2.8.3Calculul arcurilor elicoidale cilindrice de compresiune
Elementele geometrice caracteristice unui arc elicoidal cilindric de compresiune, cu sectiunea spirei rotunda, sunt prezentate in fig. 2.32 si se refera la:
d diametrul spirei;
Di diametrul interior de infasurare;
Dm diametrul mediu de infasurare;
D diametrul exterior de infasurare;
t pasul spirei;
H0 lungimea arcului in stare libera;
unghiul de inclinare al spirei in stare libera.
Fig 2.32 Elementele geometrice ale unui arc elicoidal
Unghiul de inclinareal spirei ia valori in intervalul 6 9C , iar raportul Dm/d=i, denumit indicele arcului, are valorile:
pentru arcuri infasurare la rece, in intervalul 4 16C
pentru arcuri infasurare la cald, in intervalul 4 10C
Numarul total de spire nt ale unui arc elicoidal de compresiune se determina cu relatia nt= n+nr , in care n reprezinta numarul de spire active (care participa la deformatia elastica a arcului), iar nr este numarul spirelor de reazem (de capat). Numarul spirelor de reazem se determina astfel:
nr = 1,5 daca n = 7;
nr = 1,53,5, daca n>7.
Pentru dispunerea centrica a sarcinii, suprafata de asezare a arcurilor elicoidale cilindrice de compresiune trebuie sa fie perpendiculara pe axa de simetrie a arcului:
In acest sens , suprafetele de asezare ale arcurilor elicoidale de compresiune se prelucreaza plan, perpendicular pe axa arcului ; spire de capat , prelucrate astfel, nu se deformeaza elastic.
Caracteristica elastica a unui arc elicoidal cilindric de compresiune este prezentata in fig. 2.33, utilizandu-se notatiile:
Fig 2.33 Caracteristica elastica a unui arc elicoidal
H0 lungimea arcului in stare libera;
F1 forta initiala, de precomprimare (de montaj ), care se alege in functie de destinatia arcului ;
δ1, H1 sageata, respectiv lungimea arcului montat pretensionat cu forta F1;
Fmax forta maxima de functionare ;
δmax, Hmax sageata, respectiv lungimea arcului corespunzatoare fortei F;
h cursa de lucru a arcului;
Fb forta limita de blocare a arcului;
δb, Hb sageata, respectiv lungimea arcului blocat (comprimat spira pe spira).
Ca urmare a neuniformitatii pasului spirelor, portiunea finala a caracteristicii, la sarcini apropite de Fb, poate deveni neliniara.Pentu a asigura arcului o caracteristica liniara, se recomanda ca Fmax (0,80,9)Fb.
Tinand seama de tolerantele diametrului sarmei de arc, pentru a se evita contactul intre spirele active, jocul ∆ dintre spire , corespunzator sarcinii maxime de functionare , trebuie 0,1d.
Pentru obtinerea unei caracteristici elastice neliniare (progresive) a arcurilor elicoidale , sunt utilizate: arcuri elicoidale conice; elicoidale cu pas variabil sau diametrul sarmei variabil. Diametrul sarmei poate varia liniar ( sarma conica) sau parabolic, catre ambele extremitati ale sarmei sau numai catre una din extremitati.
Calculul de rezistenta al arcului elicoidal cilindric de compresiune cu spira rotunda este evidentiat in schema din fig. 2.34.
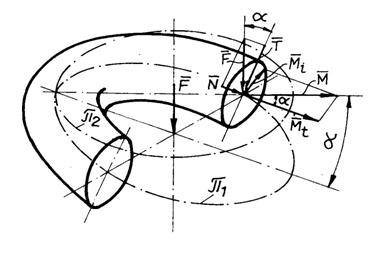
Fig 2.34 Schema pentru calculul de rezistenta al arcului elicoidal
Schema pentru calculul de rezistenta al arcului elicoidal cu spira rotunda este prezentata in fig.2.34.Spira arcurilor elicoidale de compresiune (sau de tractiune) este o bara curba, solicitata de forta F, orientata dupa axa arcului. Axa spirei este cuprinsa in planul π1, inclinat fata de planul perpendicular pe axa arcului π2 cu unghiul α.
Forta axiala F se reduce, in centrul unei sectiuni normale pe axa spirei, la torsorul format din vectorul forta F, paralel cu axa arcului si vectorul moment M, perpendicular pe aceasta.Componentele acestor vectori , cuprinse in planul sectiunii normale si cele cuprinse in planul perpendicular pe aceasta sectiune, sunt:
momentul de torsiune Mt = F cosα Dm/2
momentul de incovoiere Mi = F sinα Dm/2
forta taietoare T = F cosα;
forta normala N = F sinα.
Deoarece unghiul de infasurare are valori mici, iar tensiunea produsa de forta taietoare T este neglijabila , in calcule se pot considera spira ca fiind solicitata doar de momentul de torsiune .
Mt = F x Dm/2 (2.7)
Neglijarea influentei unghiului de infasurare α echivaleaza cu tratarea arcului elicoidal ca o bara dreapta, obijnuita prin desfasurarea arcului, asupusa actiunii momentului Mt, care determina tensiunea.
Τt = Mt/Wp = F[Dm/2]/[πd3/16] = 8FDm/πd3 (2.8)
Fig. 2.35 Schema pentru calculul de rezistenta al arcului elicoidal
Datorita curburii spirei, tensiunea tangentiala tt nu este uniform distribuita pe intreaga periferie a sectiunii acesteia, valoarea maxima ttmax apare in partea interioara
a spirei fig.3.8 si se determina cu relatia:
ttmax = k tt (2.9)
in care k reprezinta coeficientul de forma al arcului, dependent de indicele i al acestuia si se poate determina cu relatia:
k = 1 + 1,6/i (2.10)
sau alege din diagrame.
Tinand seama de relatia 3.9, relatia 3.10 devine:
ttmax = k[8FDm]/[πd3] = k[8Fi]/[πd2] ≤ τat (2.11)
Rezistentele admisibile la torsiune τat se aleg in functie de materialul arcului, tratament termic aplicat, caracterul sarcinii ( statica sau ascilanta), conditiile de functionare , importanta arcului in cadrul ansamblului din care face parte, avand valori cuprinse in intervalul τat = 500800Mpa.
Calculul la deformatii consta in determinarea deformatiei arcului, corespunzatoare unei anumite incarcari.Deformatia arcului elicoidal cilindric de compresiune (sageata) este reprezentata de spatiul parcurs de forta F fig 2.36a ca urmare a rasucirii cu unghiul θ a barei de lungime l = πDmn fig. 2.36b care reprezinta arcul desfasurat, n fiind numarul spirelor active. Rasucirea spirei arcului se calculeaza cu relatia :
θ = Mtl/Glp= F[Dm/2]Dmn/G[πd4/32] = 16FD2mn/Gd4 (2.12)
iar deformatia arcului este egala cu
δ = θ Dm /2 = 8 FD2mn/ Gd4 (2.13)
in care G reprezinta modulul de elasticitate transversal si lp momentul de inertie polar al sectiunii spirei arcului.
a
Fig 2.36 Schema pentru calculul la deformatii
Relatia 2.13 se poate exprima sub forma:
δ = 8Fin/Gd (2.14)
Prin relatia 3.16 se stabileste influenta hotaratoare a indicelui arcului asupra sagetii sale, arcurile cu indice mare fiind mai usor deformabile.
3 STUDIUL ASUPRA CATALIZATORILOR FOLOSITI PENTRU DEPOLUAREA M.A.I. PENTRU AUTOVEHICULE
3.1 Notiuni introductive .
Problemele de poluare si cele ale solutiilor tehnice destinate anihilarii acesteia (sau a diminuarii ei la nivele mai putin periculoase) au devenit extrem de actuale in ultimii 30 de ani. Incalzirea globala , un efect general al multor procese care contribuie la dezechilibrarea mediului natural, noul concept de dezvoltare durabila, declaratia de la Kyoto, completarea proiectarii tehnologice cu alt concept modern, acela al productiei curate, toate acestea au dus la concentrarea eforturilor cercetatorilor din foarte multe domenii asupra metodelor concrete de depoluare.
3.1.1 Conventia de la Kyoto.
Prin Conventia de la Kyoto au fost stabilite gazele care genereaza efectul de sera. Astfel, cei mai importanti dintre poluantii care sunt responsabili de efectul de sera, sunt bioxidul de carbon, metanul, oxizii azotului, ozonul troposferic si clorofluorocarburile (fig.3.1).
Generatorii efectului de sera
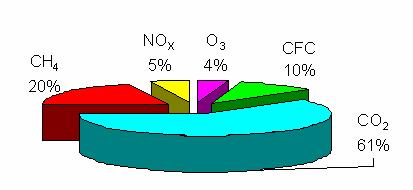
Fig.3.1
Pe tipuri de autovehicule contributia acestora la formarea oxidului de carbon si oxizilor de azot este aratata in figurile 3.2. respectiv 3.3. Cele mai importante categorii de autovehicule asupra carora este necesar a se interveni sub o forma sau alta, in vederea reducerii poluarii, sunt autoturismele si autovehiculele grele in special cele de transport marfa.
Fig.3.2
Fig.3.3
3.1.2 Norme impuse de comunitatea europeana.
Pana in zilelel noastre sistemele de injectie au evoluat constant. Motivul acestei evolutii il constituie faptul ca poluarea are o mare acoperire in dezbaterile comunitatii europene si mondiale . De altfel , a avut loc o evolutie rapida a normelor de poluare , obligand constructorii sa faca eforturi mari pentru a-si aduce produsele spre un nivel de poluare care sa se apropie de zero in viitorul apropiat.
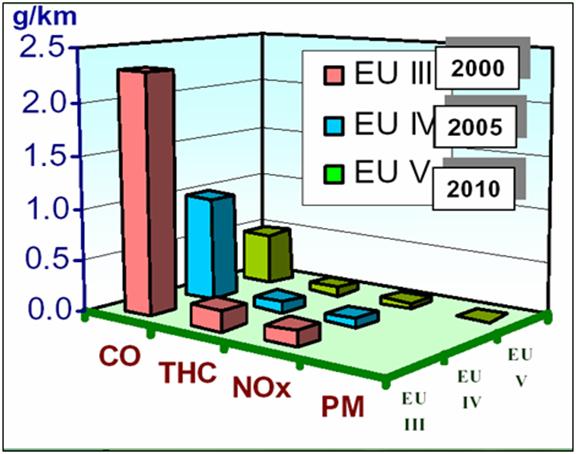
Fig.3.4 Legislatia europeana cu privire la emisiile poluante.
CO - monoxid de carbon ;
THC+NOx - hidrocarburi, azotati si azotiti;
PM - particule materiale (funingine)
3.2 Necesitatea catalizatorilor in oxiodarea poluantilor.
Faptul ca substantele rezultate din urma procesului de ardere, sau a trecerii din starea lichida in alta stare de agregare, respectiv gazoasa, nu se afla la echilibru electrochimic este cauza pentru care in gazele de evacuare ale motoarelor cu ardere interna se afla poluanti in cantitati apreciabile. Un echilibru electrochimic real este singurul care practic ar elimina toate substantele poluante, incarcate din punct de vedere electric, puternic electropozitiv, fapt care le face sa reactioneze cu substante din mediul inconjurator care au legaturile valente slabe: verdeata, derma umana etc. Insa acest echilibru nu poate fi atins decat la temperaturi inalte, datorita vitezei prea mici a reactiilor chimice.
In urma cercetarilor, au fost
concepute instrumente care sa permita realizarea vitezelor mari de transformare
chimica chiar la temperaturi scazute. Au fost denumite catalizatori si cu ajutorul
acestora se obtin valori ale concentratiilor poluantilor, apropiate de cele de
la echilibrul chimic, valori care satisfac normele de protectie a mediului.
Actiunea asupra tuturor poluantilor, respectiv oxidarea completa a oxidului de
carbon si a hidrocarburilor nearse, precum si reducerea oxizilor de azot, este
asigurata doar intr-un domeniu foarte ingust si anume pentru λ = 1.1,03
dupa cum se poate observa in figura 3.5.
Fig.3.5 Domeniul de oxidare al poluantilor
Mentinerea dozajului in acest interval se realizeaza prin injectia de combustibil in fiecare cilindru, prin reglarea automata a injectiei cu ajutorul informatiilor date de o sonda - numita sonda λ - amplasata inaintea catalizatorului.
Cu linie intrerupta sunt reprezentate valorile poluantilor fara amplasarea catalizatorului, iar cu linie continua sunt valorile acelorasi poluanti, insa cu gazele postcombustie trecute prin catalizator. Ca urmare a varierii dozajului se poate actiona practic fie asupra oxidului de carbon si hidrocarburilor (in zona dozajelor sarace prin oxidare), fie asupra oxizilor de azot (in zona dozajelor bogate prin reducere).
3.3 Scurt istoric al convertoarelor catalitice
Convertorul catalitic este un dispozitiv utilizat pentru a reduce toxicitatea emisiilor provenite de la un motoarele cu ardere interna. Folosit pe scara larga pentru prima oara in productia de serie de automobile pe piata americana, in anul 1975 model pentru a se conforma cu inasprirea reglementarilor EPA (Environmental Protection Agency), cu privire la evacuare auto, convertoare catalitice sunt inca cel mai frecvent utilizate in sistemele de evacuare ale autovehiculelor. Un convertor catalitic ofera un mediu pentru o reactie chimica toxica combustie de unde produsele sunt convertite in mai putin de substante toxice.
Convertorul catalitic a fost inventat de Eugene Houdry, un inginer mecanic francez care a trait in Statele Unite. In jurul anului 1950, atunci cand rezultatele studiilor preliminare asupra smogului din Los Angeles au fost publicate, Houdry a devenit ingrijorat in privinta rolului pe care il are sistemul de evacuare al automobilelor asupra poluarii aerului si a fondat o companie speciala, Oxy-Catalyst, pentru a dezvolta convertoare catalitice, pentru motoarele pe benzina - o idee foarte inovativa pe care a si patentat-o. Problema catalizatoarelor timpurii era ca bezina utilizata continea tetraetil de plumb, un compus antidetonant puternic care din pacate aproape anula efectul catalizatoarelor si le distrugea.
Folosirea pe scara larga a catalizatorilor in vederea reducerii emisiilor poluante de tipul HC, CO, NOx , produse de motoarele cu ardere interna are o vechime de cca 31-32 de ani. La inceput s-a considerat ca solutia catalizatorilor va fi temporara deoarece dezvoltarea controlului electronic al functionarii motoarelor, va rezolva problemele arderii poluante. Timpul a demonstrat insa ca gestionarea sofisticata a functionarii motoarelor nu poate sa suplineasca functiile catalizatorilor, asa ca acestia au devenit standard in stabilirea gradului de poluare pe care-l produce fiecare tip de masina .
Principalele elemente care au evoluat in studiile de cataliza au fost in paralel, atat structurile in care se depune catalizatorul cat si materialele catalitic active.
Asa s-a ajuns ca astazi sa nu se mai vorbeasca decat de monoliti ceramici sau metalici pentru depunerea straturilor de catalizatori, ca o solutie cat mai fiabila. Aceste materiale asigura o mare suprafata fizica pentru reactia catalitica, fara a creste considerabil caderile depresiune pe traseul urmat de gaze, asigura, de asemenea, o rezistenta termica si mecanica excelente si o pozitionare pe tubulatura de evacuare fara pretentii deosebite din punct de vedere tehnologic.
3.4 Convertorul catalitic
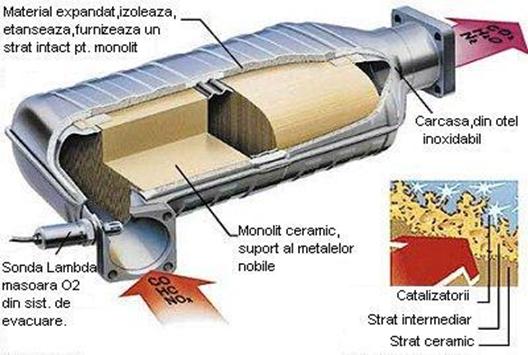
Fig.3.6 Schema convertorului catalitic
Catalizator (convertizor catalitic) - componenta a sistemului de evacuare a gazelor rezultate ca urmare a arderii combustibilului care "trateaza" gazele de esapament inainte ca acestea sa fie evacuate.
Catalizatorul are forma unui amortizor de sunet clasic , eliptic sau rotund ,
in interiorul caruia sa afla un monolit ceramic sau metalic pe care sunt depuse metale nobile care favorizeaza conversia gazelor poluante in gaze nepoluante.
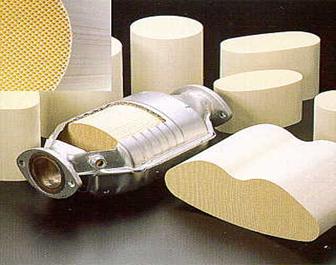
Fig.3.7 Formele convertoarelor catalitice
In catalizator (convertorul catalitic) au loc procese de transformare a hidrocarburilor in dioxid de carbon (CO2) si
vapori de apa, a monoxidului de carbon
(CO) in dioxid de carbon (CO2) si a
oxidului de azot (NO in azot (N2) si oxigen(O2).
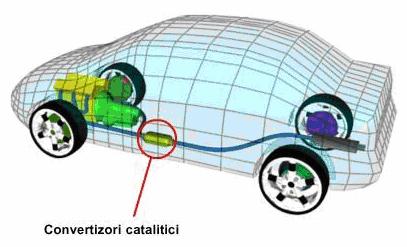
Fig.3.8 Amplasarea convertizorilor catalitici
3.4.1 Functionarea convertorului catalitic
Functionarea
in conditii normale a unui convertor catalitic conduce la o transformare a gazelor de ardere in gaze cvasiinofensive eliminand in acest fel o parte importanta a
poluantilor.
Reactile
chimice care au
loc in catalizator sunt posibile in
anumite conditii:
Temperatura (amorsarea catalizatorului).
Amestec perfect stochiometric.
Prezenta metalelor pretioase care activeaza reactiile de oxidare si reducere.
La functionarea cu amestec sarac ;
-Catalizatorul oxideaza particulele nearse si stocheaza excesul de oxigen.
La functionarea cu amestec bogat;
-Catalizatorul reduce Nox si utilizeaza oxigenul stocat pentru a oxida impuritatile
a)Temperatura de functionare
Eficacitatea depinde de temperatura de functionare. Amorsarea se face in jur de 250 C iar eficacitatea maxima o are la temperaturi mai mari de 450 C.
Convertizoarele catilitice isi pot pierde eficacitatea mai rapid daca functioneaza la o temperatura mai ridicata mult timp. Creste temperatura de amorsare iar coeficientul de conversie scade.
b)Efectele asupra catalizatorului
Un convertor este un element destul de fragil, si poate fi distrus cu usurinta de:
Efecte mecanice.
Efecte termice.
Colmatare.
Efectele mecanice
Spargerea carcasei cauzata de :
Miscarile coloanei de esapament.
- Socuri si oboseala termica, variatii brutale de temperatura la amorsare sau in deceleratie, improscare cu apa , care poate duce la spargerea blocurilor ceramice.
Efecte termice
- Topirea datorata temperaturii excesive (T > 1000 C) ca urmare a tratarii unei cantitati prea mare de poluanti.
Evolutia substantelor active la temperaturi inalte prin migrarea metalului activ in interiorul suportului metalic.
Sublimarea metalului activ la temperatura inalta.
- Vitrificarea substantei active.
Colmatarea
Suprafata activa a convertorului poate fi partial sau total colmatata, adica acoperita de plumb care se gaseste in benzina. Acest lucru provoaca neutralizarea catalizatorului deoarece gazele nu mai ajung in contact cu metalul activ depus pe suprafata ceramica. Acelati efect ca si plumbul il pot avea uleiurile , fosforul si sulful.
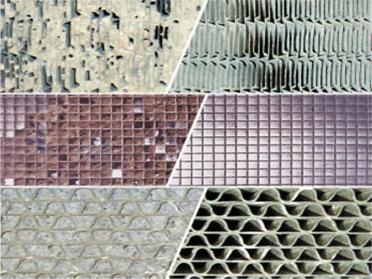
Fig.3.9 Exemplu de colmatarea a catalizatorilor
Remarca :
-O pana de combustibil poate produce supraincalzirea catalizatorului si distrugerea sa deoarece un amestec sarac provoaca o ardere lenta cu o crestere importanta a temperaturii gazelor de esapament
Eficacitatea catalizatorului depinde de imbogatire
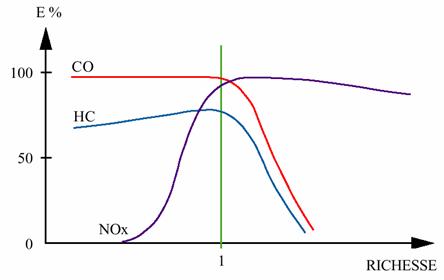 Fig.3.10 Procentul de convertire a celor trei poluanti
in functie de imbogatire
Fig.3.10 Procentul de convertire a celor trei poluanti
in functie de imbogatire
3.4.2 Componentele convertorului catalitic
Convertorul catalitic este format din mai multe componente
Nucleul sau miezul. Nucleul este adesea un fagure ceramic in convertoarele catalitice moderne, dar sunt utilizati si faguri din otel inoxidabil, de asemenea. fagurele creste cantitatea de suprafata disponibila pentru a sprijini catalizatorul, si, prin urmare, este adesea numit un suport de 'catalizator'.
Strat auxiliar. Stratul auxiliar este utilizat pentru a face convertoare mai eficiente, de multe ori ca un amestec de siliciu si alumina. Stratul, atunci cand este adaugat nucleului, formeaza o suprafata neregulate, dura, care are o arie mult mai mare decat suprafata de baza plana, care apoi permite existenta a mult mai multor locuri pentru depunerea substantelor catalizatoare
Catalizatorul in sine este cel mai adesea un metal pretios. Platinum este catalizatorul cel mai activ si este utilizat pe scara larga. Acesta nu este potrivit pentru toate aplicatiile, din cauza unor reactii nedorite suplimentare si / sau a costurilor. Paladiu si rodiu sunt doua de alte metale pretioase utilizate. Platina si rodiu sunt folosite ca un catalizator de reducere, in timp ce platina si paladiu sunt folosite ca un catalizator de oxidare. Ceriul, fierul, manganul si nichelul sunt deasemenea folosite, cu toate ca fiecare are propriile sale limitari. De exemplu, nichelul nu este legal pentru a fi utilizat in cadrul Uniunii Europene (din cauza reactiei cu monoxidul de carbon),in timp ce de cupru pote fi folosit, dar utilizarea sa este ilegala in America de Nord ca urmare a formarii de dioxina.
3.4.3 Clasificarea convertorilor catalitici
S-au dezvoltat astfel trei principii de utilizare a catalizatorilor in functie de actiunea lor :
- Cu o singura treapta, cu actiune asupra fie a oxizilor de azot, fie a oxidului de carbon si a hidrocarburilor nearse;
- Cu doua trepte, cu actiune asupra tuturor poluantilor;
- Cu trei trepte, cu actiune asupra tuturor poluantilor;
Catalizatorul oxidant, ajuta la conversia cu rezultate foarte bune a oxidului de carbon si a hidrocarburilor nearse (fig.3.11). Catalizatorul lucreaza in exces de aer, introdus fie prin utilizarea unui amestec sarac, fie prin introducerea de aer suplimentar in sistemul de evacuare. Acest tip de catalizator nu necesita reglaje. Un alt tip de catalizator insa reducator, denumit Denox, face posibila conversia oxizilor de azot in prezenta aerului. Se gaseste in prezent in faza de cercetare si ofera un grad de conversie de 50% a componentelor NOx.
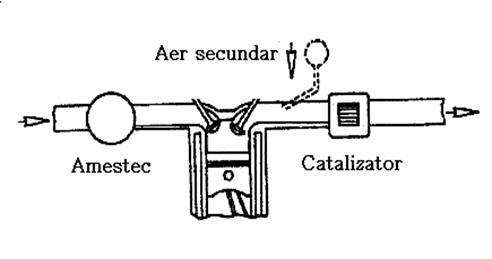
Fig.3.11 Catalizator cu o singura cale
Catalizatorul dublu, este compus din doua trepte, prima de reducere a oxizilor de azot, iar a doua treapta de oxidare a oxidului de carbon si a hidrocarburilor nearse (fig.3.12). Pentru ca acest catalizator sa fie rentabil este necesar ca motorul sa functioneze in regim de amestec bogat (λ<1).
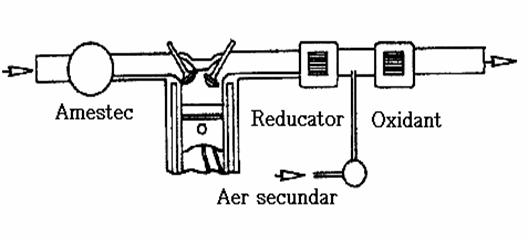
Fig.3.12 Catalizator cu doua cai
Din acest motiv, utilizarea acestui tip de catalizator este in scadere, deoarece tendinta actuala este de a produce motoare care functioneaza in regim de amestec sarac, iar valorile maxime acceptate de legislatie la CO2 sunt tot mai mici. De asemenea la acest tip de catalizator nu sunt necesare reglajele suplimentare ale amestecului carburant. Datorita functionarii cu amestec bogat, sunt produsi compusi ai amoniacului, care nu pot fi convertiti decat in mica masura. Acesta este si motivul aparitiei catalizatorului cu trei cai.
Catalizatorul cu trei cai, are proprietatea de a reduce masiv toate trei componentele toxice ale gazelor de esapament: NOX, CO si HC (fig..13). Pentru ca purificarea gazelor sa fie optima, a fost necesara introducerea unui sistem suplimentar de reglaj al amestecului.
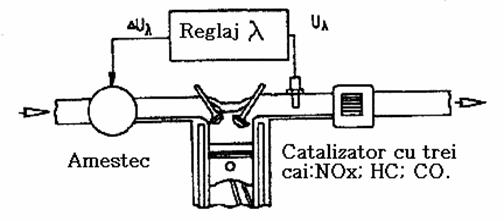
Fig.3.13 Catalizator cu trei cai
Mentinerea amestecului in intervalul λ = 1.1,03, se realizeaza prin injectia
de combustibil in fiecare cilindru, prin reglarea electronica a injectiei cu
ajutorul informatiilor date de o sonda λ - amplasata inaintea
catalizatorului.
Fig 3.14 Emisii poluante fara catalizator si emisii poluante cu, catalizator
Fara acest sistem de reglaj cu sonda , gradul de conversie realizat de catalizator este de 40-50%, in timp ce cu acest sistem gradul de conversie este de peste 95%. Catalizatorul cu reglaj, cu trei cai, este la ora actuala cel mai eficient sistem de curatare a gazelor rezultate de la motoarele cu ardere interna. In figura 3.14, se pot observa comparativ, valorile emisiilor poluante, fara, respectiv cu acest tip de catalizator. Pentru a declansa o reactie chimica, este necesara depasirea unui prag energetic numit si energie de activare. Modul de actiune al catalizatoarelor se bazeaza pe reducerea nivelului acestui prag energetic de reactie atat la reactiile de oxidare cat si la cele de reducere. Vitezele de reactie sunt marite. Temperatura necesara desfasurari reactiilor este redusa substantial. Reactia propriu zisa are loc dupa ce in zonele cu efect catalitic au fost introduse substantele care se vor oxida si oxigenul. Prin aceasta se obtine reducerea substantiala a energiei necesare declansarii reactiilor.
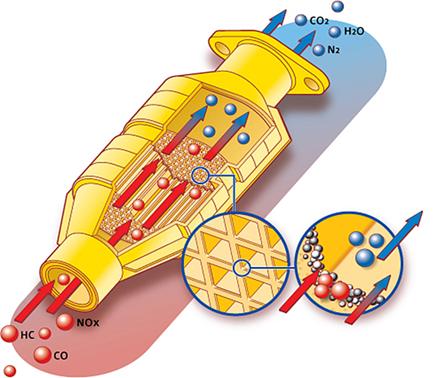
Fig.3.15 Schema convertor catalitic cu 3 cai
3.4.4 Sonda de oxigen (lambda)
Sonda Lambda este un senzor amplasat pe tubulatura de evacuare si conectat la ECU, care in esenta consta intr-un conductor de curent electric a carui intensitate variaza in functie de cantitatea de oxigen care traverseaza sonda. In interiorul acesteia exista un material ceramic poros, din dioxid de zirconiu (ZrO2). Intensitatea curentului prin placa de zirconiu variaza in functie de numarul de molecule de oxigen care traverseaza materialul ceramic. Deoarece sonda functioneaza optim doar la temperaturi mari, "la rece", pina cind gazele de esapament ating temperaturi de 4-500C, sonda este incalzita de o rezistenta din interiorul ei, dupa care caldura ii va fi furnizata chiar de temperatura gazelor de esapament.
Autoturismele cu motorizari euro 3 si 4 au chiar 2 sonde, una amplasata inaintea catalizatorului pentru optimizarea amestecului aer/combustibil, si una dupa catalizator, pentru verificarea eficientei acestuia. Constructorii recomanda verificarea sondei la fiecare 30 000 de kilometri sau la fiecare doi-trei ani de functionare a masinii si schimbarea sondei in cazul cind apar probleme in functionarea acesteia.
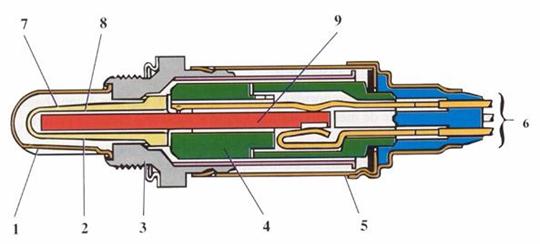
Fig.3.16 Componenta unei sonde de oxigen
|
1 Teaca de protectie. 2 Element ceramic. 3 Filet. 4 Dulie de contact. 5 Dulie de protectie. |
6 Conectori electrici. 7 Ceramica scaldata de gaze de esapament. 8 Ceramica scaldata de aer curat 9 Rezistenta de incalzire. |
3.5 Stadiul actual al cercetarilor de cataliza
destinate reducerii poluarii
3.5.1Tendinte
La sfarsitul anilor 1970 s-a descoperit ca diferite combinatii de platina Pt si rodiu Rh (metale pretioase a caror activitate catalitica era cunoscuta in chimie de mai de mult timp) pot oxida simultan oxidul de carbon CO si hidrocarburi HC si de asemenea pot reduce si diferiti oxizi ai azotului NOx, daca raportul aer/carburant este mentinut in apropierea punctului stoichiometric.
Deoarece se produc trei reactii catalitice, catalizatorul bazat pe principiile de mai sus s-a numit ,,cu trei cai''.
Catalizatorii numiti cu ,,trei cai'' prezinta, principial, urmatoarea compozitie:
- 0,1.0,15 % metale pretioase cu un raport Pt/Pd de 5 la 1;
- concentratii diferite de CeO2 sau de (CeO2 oxid de ceriu + ZrO2 oxid de zirconiu) in stratul superficial al suprafetei catalitice;
- suportul de γ-Al2O3 stabilizat cu 1.2 % La2O3 si / sau BaO.
Cheia succesului in utilizarea catalizatorilor cu ,,cu trei cai'' (activi in oxidarea simultana a CO,HC si reducerea NOx la N2) consta in controlul variatiei amestecului aer / benzina (aplicatia pentru motoarele cu benzina) intr-un domeniu foarte ingust de cca. ± 0,05% in jurul valorii de ~14,6,valoare ce reprezinta raportul stoichimetric al arderii. Controlul acestei abateri fata de stoechiometrie s-a facut cu un senzor de oxigen O2 numit si sonda lambda. Aceasta se monteaza pe conducta de evacuare a gazelor inaintea intrarii lor in umplutura catalitica.Catalizatorii folositi actualmente contin mari cantitati de CeO2 in amestec cu Al2O3 si s-audovedit foarte eficienti in oxidarea completa a componentei lichide de particule (FOS) fara a generaSO3. O perfectionare a compozitiei catalizatorilor a fost aceea de a depune Pt pe suportul de Al2O3cu adaos masiv de CeO2 si un zeolit. Rolul zeolitului este acela de a stoca intermediarhidrocarburile nearse emise pe durata functionarii la rece, cu eliberarea lor ulterioara pentru oxidarepe Pt dupa cresterea corespunzatoare a temperaturii. Toate aceste substante chimice sunt depuse pe monoliti ceramici.
3.5.2 Suporti ceramici pentru catalizatori
a. Tehnologia CERCOR
Elementul de catalizator ,,Cercor'' este constituit dintr-o structura de fagure din ceramica cu pereti subtiri. Aceasta structura este fabricata prin infasurarea unor straturi alternative de hartie celulozica poroasa plana si ondulata, acoperite cu o pasta de sticla solubila cu o compozitie adecvata (alumino-silicat de litiu).
Infasurarea straturilor se face pana se obtine o structura cilindrica cu diametrul si lungimea dorite. Dupa infasurare, cilindrul format este prelucrat termic la aproape 1250 [°C] prin ardere, proces prin care se realizeaza sinterizarea si cristalizarea postardere a materialului ceramic depus inainte de infasurare. Pentru ultimul proces, structura sinterizata este racita la 100 [°C] cu viteza controlata.

Fig.3.17 Tehnologia Cercor
b. Suporti din pelete de alumina
Convertorul catalitic este fabricat din pelete care sunt obtinute din -Al2O3 cu o densitate de 0,68 [g / cm3] si un diametru aproximativ 1/8 [inch.]. Peletele au forma geometrica de baza sfera sau cilindrul, si prezinta o foarte buna rezistenta la strivire si abraziune , cat si o buna suprafatade reactie, mai ales datorita porilor superficiali specifici structurilor ceramice.
Convertorul catalitic fabricat din pelete are urmatoarele dezavantaje: este greu si se incalzeste incet pana la temperaturile necesare reactiilor de oxidare catalitica, pentru a putea fi eficient chiar de la startul motorului; abraziunea granulelor in timpul functionarii convertorului conduce la antrenarea prafului rezultat in mediul ambiant, cu implicatii majore privind poluarea mediului. Are avantajul ca la cca 50.000 de mile se poate inlocui catalizatorul, turnand pur si simplu alte granule in containerul de metal golit de granulele vechi.
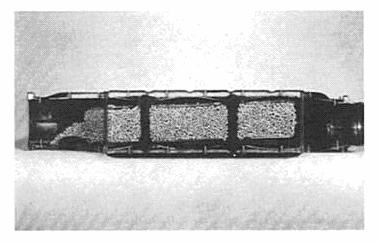
Fig. 3.18 Convertor catalitic fabricat din pelete de alumina.
c. Cerintele pe care trebuie sa le indeplineasca un substrat
Pentru a fi acceptat pe piata, un substrat de convertor catalitic trebuie sa indeplineasca un ansamblu de cerinte dintre care se vor enumera selectiv:
- substratul trebuie sa poata fi acoperit cu un strat de catalizator cu o mare suprafata fizica BET;
- trebuie sa aiba o capacitate calorica scazuta, o masa termica scazuta si un coeficient de transfer al caldurii ridicat, pentru a permite schimbul de caldura intre gazele de esapament si
substratul solid;
- sa aiba o arie mare a suprafetei specifice de reactie per volum, astfel incat intr-un spatiu
minim sa se poata realiza o viteza de oxidare corespunzatoare a componentelor CO, CHx, sau
reducere a NOx;
- sa fie rezistent la o temperatura de utilizare mare care sa acopere si cresterile accidentale de
temperatura pe perioadele de functionare in afara regimului normal a motoarelor;
- sa aiba o buna rezistenta la socuri termice, pentru a face fata atat la regimurile stationare de
functionare ale motoarelor cat si la cele de soc termic.
3.5.3 Dimensiuni si modele de celule (numai cazul extrudatelor)
Matrita de extrudare trebuie sa fie proiectata astfel ca sa realizeze cerintele de mai sus, fara a se ajunge la costuri ridicate de fabricare a acestor matrite .
Doua forme de celule s-au dovedit a indeplini aceste cerinte privitoare la cost si la posibilitatile tehnologice: celula patrata si celula in forma de triunghi echilateral. Celulele sunt dimensionate prin distanta intre celule L, prin grosimea peretilor t si prin raza de racordare R, parametru care variaza in timp din cauza uzurii matritei in contact cu mediul abraziv care este alumina sau alte materiale ceramice. In lucrare sunt prezentate tabelar formulele de calcul pentru principalele caracteristici geometrice ale celulelor patrate si in forma de triunghi echilateral.
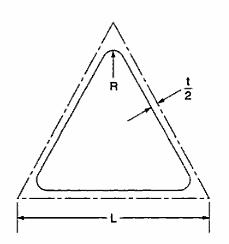
Fig.3.20 Celula in forma de triunghi echilateral
Marimea suportilor de catalizator
Marimea suportilor de catalizator este determinata de doua grupe de factori:
1. factori de performanta (debitul de gaze convertibil, performanta light off, eficienta conversiei etc.);
factori de constructie (formula stratului de placare, incarcarea cu catalizator a suportului etc.).
3.5.5 Proprietatile fizice ale suportilor de catalizator
Proprietatile fizice ale suportilor de catalizator pot fi grupate in proprietati termice, proprietati mecanice si durabilitatea .
a. Proprietatile termice
Principalele proprietati termice sunt reprezentate de:
caldura specifica cp
conductivitatea termica K
coeficientul de dilatare termica CTE
b. Proprietatile mecanice
Principalele proprietati mecanice sunt reprezentate de:
rezistenta la compresiune;
modulul E.
Rezistenta la compresiune, este masurata in trei feluri distincte si anume: strivire (compresiune) uniaxiala pe directiile axiala A, tangentiala B si diagonala C; compresiune izostatica 3D; compresiune biaxiala 2D.
Metodologia de masurare a constantei la oboseala « n » presupune masurarea MOR la temperatura de regim si a umiditatii relative, pentru cinci valori diferite de solicitare, niveluri intre care sa existe un interval de minim o decada.
Modulul E al fagurilor de ceramica extrudata se obtine prin masurarea frecventei de rezonanta a barelor MOR intr-o gama de temperaturi.
c. Durabilitatea fizica
In practica, un convertor catalitic trebuie sa aiba o durata de viata (durata de utilizare) decca 100.000 [mile]. Durata de viata se refera atat la durabilitatea catalitica cat si la durabilitatea fizica. In lucrare, se descriu toate aspectele, teoretice si practice, care se iau in considerare in vederea proiectarii corecte a convertorului catalitic. In esenta, acestea se refera la designul ambalajului, durabilitatea mecanica si durabilitatea termica.
Diagnosticul functional al catalizatorului trebuie sa permita detectarea unei disfunctiuni care ar putea duce la depasirea pragului de poluare a normei EOBD.
Capacitatea de stocare a oxigenului de catre catalizator este indicatorul starii sale.Atunci cand catalizatorul imbatraneste, capacitatea sa de stocare a oxigenului scade ca si capacitatea sa de a depolua.
Principiul consta in crearea de variatii importante ale imbogatirii, in scopul umplerii cu oxigen a catalizatorului.
- Daca catalizatorul este bun, va absorbi oxigenul iar tensiunea furnizata de sonda de oxigen aval va ramane constanta.
- Daca este uzat, oxigenul nu va mai putea fi stocat, iar acest lucru va antrena o variatie a tensiunii in sonda de oxigen aval. Cu cat catalizatorul este mai uzat cu atat ascilatia va fi mai importanta.
3.5.7 Imbunatatiri aplicate suportilor de catalizatori ceramici
Scopul acestor imbunatatiri consta in asigurarea, prin solutiile adoptate la suportii de convertor,unei contrapresiuni cat mai mici care sa nu influenteze negativ functionarea motoarelor si mai ales rapiditatea evacuarii gazelor, fenomen de care depinde si rapiditatea de umplere a camerelor de combustie.
Imbunatatirile au vizat corderitul cat si reducerea grosimii peretilor structurii. In acest sens s-a ajuns la corderit standard si la corderit cu pereti subtiri, realizat prin extrudarea unei compozitii dense de corderit, cunoscut azi sub denumirea de Celcor XT. Studiul cercetarilor, teoretice si experimentale, efectuate au pus in evidenta o serie de aspecte precum :
substraturile cu pereti subtiri asigura valori ale GSA similare, sau mai mari, decat in cazul substraturilor standard, ceea ce confera o activitate mai buna a catalizatorului sau, in cel mai rau caz, echivalenta;
convertoarele executate cu pereti subtiri prin extrudare sunt caracterizate printr-o sporire a durabilitatii ca rezultat a realizarii unei compozitii foarte dense comparativ cu cea a substratelor standard;
substraturile cu pereti subtiri permit, comparativ cu peretii standard, reducerea valori factorului de integritate mecanica cu cca 42 %.
3.6Catalizatori metalici si de metal pe suport
Metalele pot fi prelucrate in forme potrivite pentru a realiza o faza activa de cataliza, in reactii care implica hidrogenul si oxigenul. Ca metale active se citeaza nichelul, cuprul, fierul, paladiul,argintul etc., iar catalizatorii pot avea formele de extrudate, pelete, granule, monoliti, tesaturi etc.
a. Pulberi metalice, granule si structuri formate din metal
Dintre pulberi, cele mai folosite la reactii catalizate in sistemul lichid-gaz au fost pulberile Raney. Finetea granulelor face sa apara probleme legate de pierderile de presiune prea mari pe circuitul tehnologic. In stare proaspata, aceste pulberi au arii mari ale suprafetelor specifice, dar aceste suprafete scad rapid la folosirea lor indelungata la temperaturi inalte, deoarece temperatura ridicata favorizeaza sinterizarea si astfel se obtin cristalite de metal mari care au suprafata fizica totala mult mai mica decat cristalitele mici fin dispersate.
Granulele au ariile suprafetelor in domeniul 30.35 [cm2.g-1]. Cele mai folosite sunt granulele de argint folosite la conversia metanolului in formaldehida prin dehidrogenare oxidativa. In timpul folosirii, aria suprafetei creste datorita unei restructurari a atomilor de argint la suprafata granulelor,in sensul faramitarii marilor cristale de la suprafata in altele mai mici,dand astfel valori alesuprafetelor metalice specifice de 40.45[cm2.g-1].
Tesaturile metalice se folosesc in mod clasic la oxidarea amoniacului cu aer, obtinandu-se monoxid de azot care este punctul de plecare la fabricarea acidului azotic. In industrie, se foloseste o tesatura de platina / rodiu (cca 10% rodiu).
Monolitii metalici folositi in domeniul auto prezinta o rezistenta hidraulica (contrapresiune) foarte scazuta. Aparitia acestora a dat ideea utilizarii lor drept catalizatori de pornire, adica folosirea lor in perioada cand catalizatorii ceramici nu ating temperatura de reactie necesara pentru conversia tuturor emisiilor. In unele privinte, este surprinzator ca monolitii de metal nu au fost primele solutii pentru cataliza auto. Sistemele metalice bine concepute pot avea, fata de variantele de ceramica, compresiunea foarte mica, rezistenta mecanica ridicata, rezistenta foarte buna la degradare termica, suprafata geometrica mare pe unitate de volum, greutate mica si manevrabilitate mai mare ca ceramica, dar suprafata fizica de reactie mai mica. Dezvoltarea formelor metalice pentru substratul de cataliza a fost intarziata, in primul rand, deoarece gazul de evacuare este foarte coroziv datorita continutului de sulf al combustibililor si a reactiei acestuia cu apa rezultata din ardere.
Prezenta sulfului, sub orice forma, in combustibilii de alimentare elimina din start utilizarea unui metal cu proprietati catalitice pentru reactiile ce au loc in toba de esapament deoarece sulful este cea mai puternica otrava a suprafetelor metalice catalitic active.
b. Substraturi din metal acoperit
Aplicarea unui strat subtire de metal cu activitate catalitica pe un substrat de metal este o metoda care confera un mijloc eficace de a separa functiile mecanice de cele catalitice.
Pentru suportul metalic cea mai uzitata metoda de fabricatie este aceea de incretire a unei benzi de folie metalica pe o pereche de role care au dinti cu un profil predefinit (sinusoidal sau triunghiular) si montarea acestei folii incretite pe o alta folie plata, de latime similara. Aceste perechi de folii sunt rulate in jurul unui ax pana se obtine dimensiunea dorita a suportului. Cea de a doua metoda care se foloseste pentru acoperirea substraturilor metalice presupune acoperirea foliei metalice inainte de construirea monolitului. Acoperirea se face prin tehnici de vopsire, pulverizare sau imersie, cu aplicare unistrat sau prin straturi multiple. Eficienta si simplitatea acestei metode este oarecum limitata de necazurile pe care le avem ulterior la sudarea monolitului (sau la lipirea lui).
3.7 Viitorul catalizatorilor cu trei cai
Modificarea principala care pune in discutie dezvoltarea si pe mai departe a tehnologiei de cataliza pentru gazele de esapament este cea legata de regimurile de functionare ale motorului. Pana la un moment dat acestea se refereau la regimul stationar, cand cataliza era stabilizata din punct de vedere termic si chimic. Acum, cerintele sunt diversificate pe relanti, sarcina partiala si sarcina plina. Din datele prezentate in literatura din domeniu, rezulta ca in conditii de mers in gol /relanti temperatura gazelor la intrarea in convertor este in general de 280 [°C], ceea ce inseamna, daca se tine cont de notiunile teoretice prezentate mai inainte, ca nu se va atinge temperatura ,,light-off'' pentru hidrocarbura, care este de cca 300 [°C]. Decalajul de crestere a temperaturii gazelor de la 280 la 300 [°C] este de doua minute. In aceasta perioada se emite in gazele de evacuare pana la 50% din totalul de hidrocarbura nearsa, ceea ce incalca toate normele de poluare acceptate la aceasta ora (in California aceste limite se situeaza la valoarea de 0,04 [g] la mila parcursa).
Solutiile impuse de aceasta constare si experimentate practic sunt: catalizator montat direct pe colectorul de evacuare; catalizator incalzit electric; capcane (filtre) de hidrocarbura; dispozitiv special de aprindere pentru gazele evacuate care contin hidrocarburi nearse;
a. Catalizator montat direct pe colectorul de evacuare
Aceste tipuri de catalizatori sunt proiectate sa functioneze la un raport stoichiometric aer/combustibil mai sarac pentru ca astfel sa fie oxidata imediat hidrocarbura nearsa in primele minute de functionare a motorului. La inceput, acesti catalizatori aveau o deficienta si anume, din cauza temperaturii prea ridicate la care functionau dupa indeplinirea rolului lor de la pornire, sinterizau, ceeace ducea la reducerea drastica a suprafetei catalitice. Dupa ce au aparut compozitiile ceramice [62 care rezista timp indelungat la temperaturi de peste 1200 [°C] fara sa se sinterizeze, fenomenul acesta negativ a fost anihilat. Totusi nici azi in literatura de specialitate nu se dau prea multe detalii si retete pentru acesti catalizatori, in afara de mentiunea ca au la dispozitie un continut ridicat de Pd.
b. Catalizator incalzit electric
Catalizatorul incalzit electric, reprezinta o alternativa. Se monteaza de asemenea in apropierea conductei de evacuare, asigurarea atingerii imediate a temperaturii light-off fiind determinata de suplimentul de energie electrica ce se foloseste pentru aceasta.
Reducerea timpului de light-off in acest caz este insemnata, sub 15 secunde, dar efectele antipoluare sunt compensate de consumul suplimentar de energie . Realizarea catalizatorilor normali cu timpi light-off mici, fara pericol de sinterizare a facut ca aceasta solutie care este destul de scumpa sa nu prolifereze ca solutie de serie mare.

Fig.3.22 Catalizator incalzit electric
c. Capcane (filtre) de hidrocarbura
Ideea este, dupa cum rezulta si din titlu, sa se construiasca elemente de stocare a hidrocarburilor nearse, elemente care sa se situeze inaintea catalizatorului principal. Dupa ce acest catalizator principal atinge temperatura necesara light-off hidrocarbura va fi eliberata si va fi convertita de catre catalizatorul principal. Dezavantajul este acela ca materialele gasite a fi apte pentru aceasta depozitare (zeolitii) prezinta caracteristici contradictorii. Ei au capacitate de depozitare dar nu au stabilitate hidrotermica suficienta la temperaturi ridicate fapt care i face sa nu fie fiabili la folosirea de lunga durata.
d. Dispozitiv special de aprindere pentru gazele evacuate care contin hidrocarburi nearse
Principalul dispozitiv este o bujie care are rolul ca, la marirea concentratiei de hidrocarburi a gazelor de evacuare, sa le aprinda inainte ca ele sa ajunga in toba catalitica. Temperatura de functionare eficienta se atinge astfel cam in 15 secunde.
Teoretic, analizandu-se aceasta problema a excesului de hidrocarburi in perioada de pornire, s-a ajuns la concluzia ca exista un potential enorm cu privire la economia de carburant atunci cand motorul functioneaza cu un amestec foarte sarac >>1. In aceste conditii de functionare, se realizeaza scaderi substantiale ale emisiilor de NOx si CO2 ultimul fiind tot mai evitat din cauza faptului ca el determina in mare masura efectul de sera.
Primul exemplu pozitiv in acest sens il reprezinta motoarele Diesel, acestea sunt motoare care intr-adevar functioneaza cu un amestec foarte sarac. La motoarele cu benzina, saracirea excesiva a amestecului carburant in comparatie cu stoichiometria, face ca arderea sa devina instabila si, de aceea, este necesar un nou concept de combustie. Toyota, Honda si Mazda au dezvoltat aceste noi concepte de ardere saraca si au obtinut rezultate incurajatoare, fapt care le a permis sa afirme ca producerea unor motoare cu amestec foarte sarac este posibila la scara industriala.
Noua dezvoltare permite reducerea
cantitatilor de platina si paladium folosite in catalizatoarele
pentru automobile cu 70 - 90
procente, performantele de purificare a
emisiilor poluante si durabilitatea acestora ramanand neschimbate . " Single - nanotehchnology " este o tehnica ce controleaza particulele mai mici decat
nanotehnologia.
In catalizatoarele
pentru masini ,
metalele pretioase permit reactii
chimice ce purifica gazele poluante emise. In
catalizatoarele conventionale, metalele pretioase , in contact cu gazele evacuate ce au temperaturi mari conduc la crearea unor conglomerate
. Acestea reduc
suprafata efectiva a cataliza torului si
activitatea acestuia este ingreunata, fiind
contrabalansata printr-o cantitate mai mare de metale pretioase.
Pentru a creste suprafata activa, Mazda a
dezvoltat un nou catalizator folosind o tehnica proprie, cu metale pretioase
foarte mici (doar 5 nanometri in diametru). Drept rezultat, nu se mai fac
aglomerari de particule cu metale pretioase, iar cantitatea acestora poate fi
redusa cu pana la 90%. Mai mult, noile materiale pentru catalizator
vor pastra acelasi nivel de eficienta a purificarii, cu
deteriorari minime in timp, chiar si in cele mai vitrege conditii de operare.
3.8 Principii de proiectare a catalizatorilor
Din punct de vedere calitativ, conceptia pentru atingerea rapida a temperaturii eficiente de functionare poate fi pusa in practica daca:
- se mareste la maxim temperatura gazului la intrarea in convertor, respectandu-se totusi limitele impuse de materialul acestuia;
- se mareste la maxim transferul de caldura prin convectie de la gazele de esapament la catalizatorul solid, concomitent cu marirea conductibilitatii termice de la suprafata catalizatorului catre interiorul acestui strat;
- se mareste la maxim aria suprafetei disponibile de cataliza pentru procesele de oxidare exoterma si pentru procesele de reducere, ambele marind sursele generatoare de caldura in interiorul catalizatorului.
Proiectarea efectiva a pragului termic de functionare a sistemului inseamna rezolvarea unei ecuatii matematice complexe care admite numai solutii numerice (Kuo, Comfort, Sun, Young, Finlayson). Prin aceste ecuatii s a demonstrat posibilitatea practica de a reduce timpul de atingere a functionarii eficiente de la cca 120 secunde la 5.7 secunde, daca amplasarea convertorului se face in apropierea colectorului de gaze evacuate.
Un parametru de proiectare este de asemenea caderea de presiune care este un element important in alegerea structurii stratului de catalizator.
3.9 Referinte despre tehnologiile convertorilor catalitici
Referinte ce se prezinta, din studiul abordat in capitol, vizeaza urmatoarele directii: dezvoltarea tehnologiilor de control a emisiilor auto prin dispozitive catalitice;importanta tehnologica a tehnologiei de control catalitic a emisiilor auto; controlul emisiilor pentru motoare Diesel; curente viitoare in controlul emisiilor poluante.
3.9.1 Dezvoltarea tehnologiilor de control a emisiilor auto prin dispozitive catalitice
instituirea standardelor stricte de normare a emisiilor vehiculelor incepand cu anii 1960, in vederea imbunatatirii calitati aerului pentru protejarea sanatatii umane, a condus la aparitia unui domeniu de cercetare foarte important si mai ales sprijinit masiv de fonduri;
cercetarea privind gasirea unei solutii catalitice a acestei probleme trebuie sa faca fata urmatoarelor cerinte: 1. indepartarea CO, HC si NOx din gazele de esapament in situatia in care aceste gaze contin cca. 10% H2O, 10.60 ppm SO2 si resturi de Zn si P; 2. functionare stabila la temperaturi de 350.1000 [°C]; durabilitate pana la inlocuire de cca 100.000 [Km];
intre anii 1972.1979 au cunoscut un succes catalizatorii Pt/Pd/Al2O3 care sunt suficienti de durabili pentru a asigura o curatire de cca 90% de hidrocarburi si de CO a gazelor evacuate;
introducerea in anul 1979 (in
in anul 2000 a fost impusa reducerea cu un ordin de marime a emisiilor poluante iar cerintele de durabilitate pana la inlocuire au crescut peste limitele anterioare ajungand la 100.000 [mile].
3.9.2 Importanta tehnica a tehnologiei de control catalitic a emisiilor auto
Aceasta cerinta tehnologica a fost satisfacuta prin eforturile creierii de noi materiale care pana la acel moment nu au mai fost elaborate. Este vorba de monolitii celulari, ceramici si metalici,prevazuti cu placari de materiale catalitice. Acesti catalizatori trebuie sa raspunda cerintei de a asigura o eficienta ridicata a eliminarii noxelor, o cadere de presiune redusa care sa nu afecteze functionarea motorului, o rezistenta ridicata la soc termic si un gabarit redus pentru a putea fi montat in locurile cele mai favorabile din punct de vedere termic pentru intrarea rapida in regim stationar.
Solutia clasica de folosire a aluminei pentru suportul de catalizator a fost imbunatatita prin adaugarea de oxizi de Ce si La pentru cresterea stabilitatii termice ceeace a condus la depasirea temperaturii de 1000 [°C]. Mai mult, folosirea oxizilor de CeO2 si LaO3, a condus la ridicarea rezistentei catalizatorilor fata de sinterizarea metalului activ la temperaturi mari de functionare.
Aceiasi oxizi joaca in paralel un rol important in asigurarea unei capacitati de stocare si transfer a oxigenului, contribuind la imbunatatirea functionarii acestui catalizator in conditiile din jurul echilibrului stoichiometric.
Asigurarea unei capacitati de stocare a oxigenului a condus si la aparitia solutiei de determinare a continutului de oxigen cu senzori, montati in sistemul de evacuare in scopul controlului exact al raportului aer/carburant in cadrul procesului de combustie.
3.9.3 Controlul emisiilor pentru motoare Diesel
combinatiile de Pt, Pd si Rh constituie la aceasta data cei mai eficienti catalizatori pentru convertoarele cu trei cai in cazul motoarelor diesel, desi reducerea sulfurilor din motorina poate sa ofere si varianta de utilizare exclusiva a catalizatorilor monocomponent pe baza de Pd;
si in cazul motoarelor Diesel, tehnica de folosire a CeO2 si ZrO2 pentru stocarea oxigenului, pentru a permite catalizatorului sa reactioneze prompt la oscilatiile rapide ale raportului aer/carburant, este solutia viabila;
pentru catalizatorii activi la emisiile motoarelor Diesel este importanta adaugarea de oxizi metalici pe baza de Si, Ba si La, cu rol in impiedicarea sinterizarii hidrotermice;
exista si o directie de cercetare care foloseste la motoarele Diesel corderita pentru suportul monolitic cu variante de suport realizate pe SiO2, ZrO2 si TiO
pentru reducerea selectiva a oxizilor de azot din gazele de evacuare ale motoarelor Diesel sa folosit Pt si Cu pe suport de zeolit. Aceasta directie de cercetare nu este definitivata prin rezultate stabile deoarece este inca necesara ameliorarea stabilitatii hidrodinamice si a rezistentei acestor suporti;
- cea mai frecventa si des intilnita este folosirea filtrelor de particule diesel.
In cazul unui filtru de particule diesel este vorba despre un sistem pentru eliminarea particulelor din gazele de esapament generate de motoarele diesel. In functie de model, se utilizeaza doua sisteme: Filtrele de particule diesel fara aditiv sunt utilizate la autovehiculele la care filtrul de particule este pozitionat in apropierea motorului. Sistemele cu aditiv sunt folosite la autovehiculele la care nu este posibila o dispunere a filtrului de particule in apropierea motorului. Filtrul cu strat catalitic de acoperire functioneaza fara aditiv si beneficiaza de un nivel de acoperire care contine metale nobile, cu efect dublu. La regenerarea pasiva se realizeaza o transformare treptata si lina in CO2 a calaminei depuse in catalizator. Acest proces se declanseaza la o temperatura cuprinsa intre 350 - 500 °C si se efectueaza continuu, fara a necesita masuri suplimentare, in special la rularea pe autostrada. Numai in cazul utilizarii mai indelungate cu nivel redus de sarcina, de exemplu in traficul urban, la fiecare 1.000 pana la 1.200 kilometri, prin intermediul unei majorari active a temperaturii gazelor de esapament pana la aproximativ 600 °C, este asigurata o regenerare suplimentara a filtrului. Particulele depuse in filtru sunt arse la aceasta temperatura. In cazul sistemelor cu aditiv, acesta este utilizat pentru reducerea temperaturii de aprindere a calaminei la aproximativ 500 °C. In functie de stilul de condus, este necesara o regenerare la fiecare 500 pana la 700 km. Aditivul este clatit automat la fiecare alimentare cu carburant pentru a ajunge in rezervorul de carburant. Un litru de aditiv este suficient pentru o cantitate de aproximativ 2.800 de litri de carburant.
Fig. 3.23 Filtru de particule
3.9.4 Curente viitoare in controlul emisiilor poluante
piata catalizatorilor este in continuare un subiect de interes stiintific si economic deoarece in mod continuu exigentele de reducere a emisiilor poluante sunt tot mai drastice. Creierea Pietei Comune Europene face ca pe o arie larga exigentele sa fie generalizate desi in componenta acestei piete unele tari au intrat recent. Ca urmare, eforturile cercetarii vor continua in directia cresterii eficientei catalizatorilor, a cresterii durabilitatii lor si a micsorarii de volum pentru a se reduce consumul de metale pretioase din straturile de catalizatori;
constructia noii clase de motoare cu amestec sarac, care au emisii reduse de gaze cu efect de sera, va face ca o parte insemnata a cercetarilor actuale asupra catalizei sa si schimbe obiectivele;
folosind experienta de succes a utilizarii catalizatorilor pe motoarele cu combustie, reactiile catalitice se vor extinde spre arii de mare importanta precum: a. reducerea emisiilor de particule la motoarele Diesel de pe camioane si autobuze;
b. reducerea ozonului in cazul aeronavelor comerciale de mare altitudine;
c. controlul emisiilor generate de sursele stationare.
4.Concluzii finale
Avand in vedere automobilul din tema de proiect , un autovehicul destinat transportului de persoane care se incadreaza in grupa autoturismelor mici (45 locuri), in urma studiului si calculelor efectuate se observa urmatorele considerente .
O dispunere a motorului , cu solutia "totul in fata" si o pozitie longitudinala , care in ciuda dimensiunilor reduse ale autovehiculului prezinta avantajul , unei caroserii coborate,cu un centru de greutate coborat care asigura stbilitatea in viraje , permite asigurarea unui spatiu mai mare pentru portbagaj, ofera o buna manevrabilitate si stabilitate pe traiectorie datorita comportamentului subvirator.
Pentru un plus de control si incredere in orice situatie se utilizeaza imbinarea suspensilor frontale de tip MacPerson cu suspensile spate compacte , prevazute cu bara de torsiune , oferind o stabilitate si manevrabilitate remarcabila.
Prin aspectul dinamic al acestui automobil s-a reusit obtinerea unei aerodinamici imbunatatite care la randul ei duce la un consum scazut de combustibil.
In ceea ce priveste amenajarea interioara , aceasta are ca obiectiv asigurarea unui confort maxim pentru pasageri si conditii ergonomice de lucru pentru conducatorul auto, care s-a si realizat ,prin inteligenta in fiecare milimetru din acest vehicul de mici dimensiuni, prin rafinament si ingeniozitate.
Avem parte si de o siguranta sporita a acestei grupe de masini, prin pozitionarea strategica a airbagu-rilor care ofera protectie indiferent de unghiul de impact (airbag-ul luneta) pentru protectia la impact posterior, si o structura de rezistenta cu stalpi ranforsati , bare de protectie laterala si zone de deformare fata si spate.
Un mare accent in realizarea acestui proiect s-a pus pe metodele de depoluare pentru autovehicule, de care aceste autovehicule de mici dimensiuni beneficiaza din plin datorita frecventei utilizarii lor in marile orase unde se cauta folosirea unor sisteme de condus ecologic.
Printr-o serie intreaga de ionvatii la nivel de motorizari si transmisii, utilizand componente care reduc frecarea, un disign compact al acestora si o eficienta imbunatatita a arderilor care vor face ca o mare parte a cercetarilor actuale asupra catalizei sa-si schimbe obiectivele si tot odata reducerea consumului de metale pretioase
Totodata prin acest sistem de condus ecologic se asigura un echilibru optim intre consum redus de combustibil si emisii scazute de CO2.
Prin studierea si calcularea parametrilor acestui automobil de mici dimensiuni s-a reusit evidentierea avantajelor unui vehicul cu 4 locuri care datorita aglomeratilor urbane si normelor de poluare impuse , o putem numi solutia marilor orase
BIBLIOGRAFIE
1. Fratila, Gh. - Calculul si constructia automobilelor, Editura Didactica si Pedagogica, Bucuresti 1977
Fratila, Gh., s.a. - Automobile, Editura Didactica si Pedagogica, Bucuresti 2004
3. Grunwald, B. - Teoria, calculul si constructia motoarelor pentru autovehicule rutiere, Editura Didactica si Pedagogica, Bucuresti 1980
4. Ivanescu,M., s.a. - Constructia si calculul autovehiculelor - Proiectarea Transmisiei Mecanice, Editura Universitatii din Pitesti 2008
5. Macarie, T.N. - Automobile, Dinamica, Editura Universitatii din Pitesti 2003
6. Racota, R.M. - Ghid pentru intocmirea lucrarii de diploma la "Motoare", Litografia Universitatii din Pitesti
7. Tabacu, I. - Transmisii mecanice pentru autoturisme, Editura Tehnica, Bucuresti 1999
8. Tabacu, St., s.a. - Dinamica autovehiculelor - Indrumar de proiectare, Editura Universitatii din Pitesti 2004
9. Olaru, I.,Popeneciu G., Biris, A., Coldea, I., Materiale de stocare a hidrogenului unui compresor termic de hidrogen ultrapur de combustie si vehicule hibride.
10. Delmon, B., Appl. Cataliysis , vol, 91. )1994=, nr 113
11. Li, X.,Wang, A., Sun, Y., Ren, J., Zhao, B., Wang, Y., Effect of surface proton exchange on hidrodesulfuriyation performance of MCM+41+supported catayst, Applied Catalysis A: General , vol 254, nr 2 (2003).
12. Colectia revistei TopGear 2007-2010
13. Colectia revistei AutoCar 2005-2009
14. Autocatalog 2007-2009
15. www. Toyota.com
16. www. iformatii auto.ro
17. www.wikipedia.com
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |