
Senzori de detectie optoelectronici
Introducere.
Senzorii reprezinta o prelungire a organelor noastre de simt si principala sursa de informatie pentru creierul uman, dar si pentru creierele electronice Scopul lor este sa determine interconectari in cadrul proceselor tehnice si sa converteasca marimile de masurat neelectrice in semnale electrice.
Traductorul este un dispozitiv care pe baza unei legi fizice realizeaza transformarea unei marimi intr-o alta marime de care difera calitativ sau cantitativ. Prin urmare, rolul traductorului este acela de a transforma o marime intr-o alta marime de aceeasi natura sau de natura diferita, prin care sa fie facilitat procesul de masurare.
La alegerea unui senzor sau traductor, un rol important il au - precizia care trebuie atinsa
efectele marimilor de influenta
caracteristicile dinamice
forma semnalului ce trebuie transmis la distanta
fiabilitatea
costurile.
Functionalitatea unui traductor impune o structura generala ce este prezentata in fig. 1.
Fig.1.2. Structura generala a unui traductor
Elemente component:
ES element sensibil (senzor)
A adaptor
CP circuit de prelucrare care in functie de anumite conditii poate fi reprezentat de exemplu de un element de liniarizare a caracterisiticii
SA sursa de alimentare.
Senzorii generatori (activi) au la baza principiului de functionare un efect fizic ce asigura conversia direct in energie electrica.
Cele mai semnificative efecte de acest tip sunt:
Termoelectric,
Piroelectric,
Piezoelectric,
Fotoelectric.
Principalele categorii de traductoare sunt:
Cu reactie,
Numerice,
Integrate,
Inteligente.
Senzori de detectie optoelectronici
Generalitati.
Una din posibilitatile cele mai performante de detectie utilizata la ora actuala in robotica este cea oferita de domeniul optoelectronic.
Energia luminoasa este o forma radianta de energie electromagnetica. Radiatia optica (semnal de intrare) este convertita intr-un semnal electronic de iesire care poate fi utilizat (dupa prelucrari) in comanda robotului industrial (fig.2).
Radiatia luminoasa este emisa sau absorbita prin cuante corespunzatoare unor particule numite fotoni.
 Acest principiu ofera o detectie in timp real, o rezolutie inalta, o imagine multispectrala.
Acest principiu ofera o detectie in timp real, o rezolutie inalta, o imagine multispectrala.
In figura 3 se prezinta 'pozitia' zonei vizibile al spectrului optic in cadrul spectrului electromagnetic. Prin radiatia luminoasa in spectrul vizibil se intelege radiatia electromagnetica in gama 0.4 µm - 0.76 µm. Radiaiia infrarosie este cea cuprinsa in gama 0.76 µm - 100 µm iar radiatia ultravioleta cea cuprinsa in gama 0.01 µm - 0.4 µm.
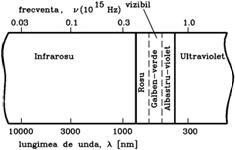
Fig.3:Pozitia zonei vizibile al spectrului optic
Posibilitatile fizice de detectare a radiatiei optice sunt diverse. Putem aminti cateva exemple:
Senzori cuantici: fotoemisivi, fotoconductivi, fotovoltaici.
Senzori termici: termistor, bolometru, termocuplu,piroelectrici.
Alti senzori: fotochimici, fotoplastici, fotoceramici.
Primele doua categorii sunt cele mai utilizate, iar, in robotica, cea mai utilizata este prima categorie.
Detectoarele cuantice functioneaza pe baza efectului fotoelectric extern: emiterea electronilor de catre solide cand acestea sunt supuse actiunii unui flux luminos. Acest tip de emisie este guvernat de doua legi principale:
densitatea curentului fotoelectronic este proportionala cu intensitatea fluxului luminos absorbit pe unitatea de suprafata emisiva.
energia maxima a electronilor emisi este direct
proportionala cu
frecventa radiatiei si nu depinde de intensitatea ei.
Conversia fluxului radiant in semnal electric prezinta constrangeri in timp din cauza factorilor ce limiteaza procesul de detectie: timpul de viata a purtatorilor de sarcina, timpul de transport a sarcinii, capacitatea termica, electronica aferenta procesului, modularea fluxului radiant.
Performantele acestor elemente, combinate cu parametrii ce descriu drumul optic, definesc in final performantele senzorului optic. Cerintele unui sistem optic de detectie pot fi grupate in douS categorii conform figurii 4.
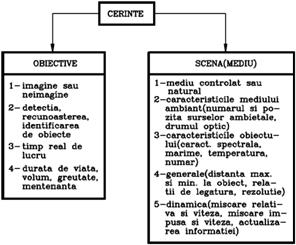
Fig. 4: Cerintele unui sistem optic de detectie |
Componentele unui senzor optic sunt grupate in trei categorii:
a) elementul fotosensibil, inclusiv primul nivel de preamplificare.
b) elemente optice (oglinzi, lentile, filtre) si elemente auxiliare pentru fixarea lor in carcasa;
c) elementele de circuit electronic pentru prelucrarea informatiei.
In concluzie, o sursa de lumina (constituita dintro dioda LED, un bec cu incandescenta, tub fluorescent) genereaza un fascicol luminos care este captat de un element fotosensibil (fotodioda, fotorezistenta, fototranzistor). Analiza prezentei sau absentei fluxului luminos pe receptor va defeni prezenta sau absenta obiectului controlat.
Fotorezistorul este format dintr-un strat semiconductor de Se, SPb, depus prin evaporare in vid pe un gratar metalic, fixat in prealabil pe o placa izolatoare (fig. 5).
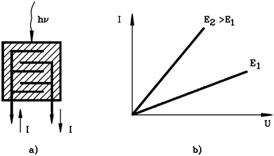
Fig.5: Fotorezistorul. Structura si caracteristici
Fotorezistorul este prevazut cu doua contacte (identice si simetrice) neredresoare pentru includerea sa in circuit. Pelicula semiconductoare se protejeaza prin acoperire cu lac sau pelicula de masa plastica
transparenta. Supusa incidentei razelor de lumina, pelicula isi modifica rezistenta electrica, aceasta scazand cu cresterea fluxului luminos incident pana la valori in jur de 100
Rezistenta de intuneric Rd a fotorezistorului este definita ca rezistenta inclusa in circuitul electric de catre fotorezistorul neiluminat. Sensibilitatea integrala S este definita ca raportul dintre fotocurent si fluxul luminos incident la suprafata fotorezistorului:
![]()
I curentul care trece prin fotorezistor la iluminare
Id este curentul de intuneric.
Daca fotorezistorul se ilumineaza cu lumina monocromatica atunci se obtine sensibilitatea spectrala. Sensibilitatea fotorezistorului SR se defineste in functie de rezistentele R si Rd la iluminare cu fluxul luminos si respectiv la intuneric.
Intarzierea in raspuns a acestor elemente sensibile este inferioara lui 10 ms.
Pentru aceste elemente sensibile se dau caracteristicile spectrale ale sensibilitatii
S = f(
sau caracteristicile voltampermetrice
I = f(U), Id = f(U)
(U este tensiunea aplicata pe fotorezistor).
Fotodioda (fig.6) reprezinta o jonctiune p-n de o constructie speciala astfel incat sa faca posibila incidenta razelor de lumina in domeniul zonei de difuzie a acesteia.
Caracteristicile statice ale fotodiodei evidentiaza doua regimuri posibile de functionare: regimul propriu-zis de fotodioda si regimul de fotogenerator (transformator al energiei luminoase in energie electrica).
In regim de fotodioda, jonctiunea p-n este polarizata invers cu ajutorul sursei U1. Incidenta razelor de lumina in zona de difuzie determina o crestere a curentului invers Iinv. Simbolul si modul de polarizare a fotodiodei sunt prezentate in figura.
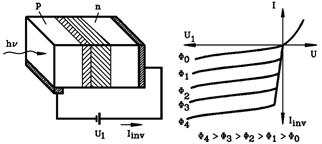
Fig. 6: Fotodioda: a) constructie; b) caracteristici
Diodele electroluminiscente (LED)(Light Emitting Diode) si IRED (Infrared Emitting Diode) sunt fotodiode emisive. Polarizand jonctiunea in sens direct, in zona de trecere a acesteia vor avea loc procese de recombinare electron - gol insotite de emisie de energie in exterior. In general suprafata activa a unei astfel de diode este de 0.1-10 mm2 si intensitatea radiatiilor emise este proportionala cu curentii directi prin jonctiune (1 - 100 mA).
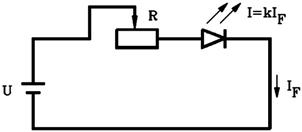 Un circuit tipic de alimentare pentru un LED este prezentat in figura 7. Eficienta
transformarii este de 1 - 5 % .
Un circuit tipic de alimentare pentru un LED este prezentat in figura 7. Eficienta
transformarii este de 1 - 5 % .
Circuit pentru alimentarea unui LED
Radiatia luminoasa obtinuta cu ajutorul unui LED este monocromatica. Se realizeaza LED-uri cu radiatie rosie, galbena, sau infrarosie. LED-ul este mai scump decat un bec de mica putere, dar este un dispozitiv cu raspuns si cu radiatie cu spectru ingust. In comparatie cu dioda laser, LED-ul are avantajul unei dependente mai scazute a puterii emise fata de temperatura si astfel cerintele de stabilizare pentru circuitele de excitare sunt mai mici.
Lampile cu incandescenta sunt folosite pe scara larga datorita simplitatii constructive si a pretului scazut. In principiu, lampa cu incandescenta este alcatuita dintr-un filament spiralat (din wolfram sau tungsten) parcurs de un curent electric (c.c. sau c.a.) care produce incalzirea acestuia pina la incandescenta. Filamentul este introdus intr-un balon de sticla cu vid, cu gaz inert sau cu halogen.
Performantele unei lampi cu incandescenta sunt definite de parametrii electrici, fotometrici si cei geometrici. Parametrii electrici principali sunt tensiunea de alimentare, puterea si curentul. Parametrii fotometrici sunt fluxul luminos emis la tensiunea nominala si eficacitatea luminoasa. Se impun conditii severe pentru circuitul de alimentare in vederea asigurarii unui curent constant. O modificare a curentului de alimentare cu 0.1 % produce o schimbare a intensitatii luminoase radiate de 0.7 %.
Componentele optice din structura unui senzor optic au rolul de a permite o transmisie si receptie optima a razei optice.
Oglinzile sunt componente optice avand un dioptru reflectant. Prin efectul optic oglinzile asigura propagarea razei luminoase dupa o directie dorita precum si orientarea adecvata a imaginii. Oglinda poate avea forma plana, curba (sferica, parabolica, cilindrica etc.) sau poate fi construita din inele (oglinzi Fresnel). Efectul optic al unei oglinzi se bazeaza pe reflexia uniforma.
In cazul oglinzii plane, reflexia nu schimba forma unui fascicul (paralel, convergent sau divergent) acestuia modificandu-i-se doar directia de propagare.
Prismele sunt componente optice cu dioptri activi plani. Din punct de vedere al efectului optic prismele pot fi:
a) de refractie: realizeaza devierea fasciculelor de raze prin transmisie;
b) de reflexie: realizeaza deviatia razei luminoase prin reflexie. Fata de sistemele cu oglinzi, prismele reflectatoare prezinta avantaje constructive si functionale importante: suprafetele active isi mentin unghiurile fixe; o prisma poate substitui un sistem de oglinzi; au un gabarit mic; se pot monta usor.
c) de divizare si reunirea fasciculelor luminoase.
Lentilele (convergente sau divergente) sunt elementele optice principale ale unui sistem optic. Acestea contin doi dioptri consecutivi, centrati din care cel putin unul este curb si care delimiteaza un spatiu transparent si refrigent.
Filtrele optice sunt lame plan-paralele care, fie ca au o transparenta selectiva in raport cu lungimile de unda ale radiatiei incidente (filtre selective) fie ca permit trecerea radiatiilor de orice lungime de unda, micsorand intensitatea luminoasa a intregului spectru (filtre neutre sau cenusii).
Fibrele optice sunt medii optice omogene, sub forma unori tuburi avand sectiunea transversala circulara si care in sectiunea longitudinala pot fi cilindrice, conice sau curbe.
Transmisia luminii printr-o fibra se bazeaza pe fenomenul de reflexie totala. Fibra optica are indicele de refractie n1 si dimensiunea transversala de 510 m. In vederea reducerii pierderilor, fibra optica este acoperita cu un strat subtire de dielectric, transparent (n2 < n1) cu grosimi de ordinal 12 m.
Senzori de proximitate optici
Senzorii de proximitate optici in constructia robotilor industriali pot fi utilizati ca senzori de securitate sau pentru sesizarea unor obiecte (sau a apropierii acestora) in efectorul robotului industrial.
Functionarea acestor senzori se bazeaza pe modificarea fluxului luminos, dintre un generator si un receptor, in prezenta obiectului controlat.
In executia cea mai
simpla, acest senzor consta dintr-un generator si receptor
asezate pe o axa comuna, obiectul de controlat intretaind
fluxul luminos dintre cele doua elemente. Sistemul are totusi o
distanta mica de actionare si, in general, se
foloseste pentru distante de pana la
Pentru marirea distantei, generatorul de lumina si receptorul se prevad cu lentil colimatoare (3). Pentru marirea rezistentei la paraziti, in special, in cazul lucrului in lumina puternica, ca sursa de lumina (1), se utilizeaza un generator de impulsuri scurte de frecventa 0.1- 1 kHz, cu posibilitatea de detectare sincrona a acestor impulsuri din partea receptorului. Practic, ca generatoare se utilizeaza diodele cu radiatii in infrarosu, iar ca receptoare (2) fotorezistoare, fototranzistoare, fotodiode.
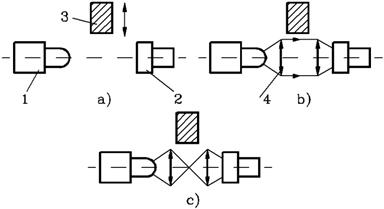 Pentru marirea sensibilitatii
spatiale de detectare, generatorul si receptorul, se prevad cu
sisteme optice de focalizare pentru distanta prescrisa (de obicei scurta)
(fig.8 , b, c).
Pentru marirea sensibilitatii
spatiale de detectare, generatorul si receptorul, se prevad cu
sisteme optice de focalizare pentru distanta prescrisa (de obicei scurta)
(fig.8 , b, c).
Fig.8: Schema principiala a senzorului
de proximitate optic.
Elemente componente sunt:
1-emitor
2 -receptor,
3-obiect,
4-lentila colimatoare.
Generatorul de lumina (1) si receptorul (2) se pot aseza sub un unghi (de obicei mic) unul fata de celalalt (ambele de aceeasi parte a obiectului) putandu-se detecta obiecte (3) prin lumina care se reflecta pe acestea, sau prin modificarea fluxului luminos reflectat pe un ecran (4) la patrunderea obiectului de detectat intre aceste elemente (fig.9).
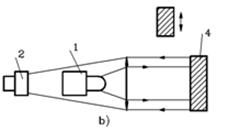
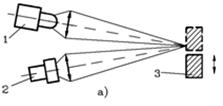
Fig.9: Schema principiala a
senzoruluide proximitate
optic pe principiul reflexiei.
Utilizarea acestor traductoare este influentata in mod esential de proprietatile de reflectare ale obiectului. La aceste sisteme se stabileste, de obicei, o limita suficient de mica de detectare, corespunzand unei suprafete cat mai intunecate.
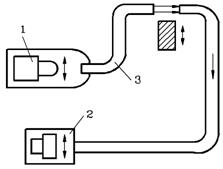 Flexibilitatea utilizarii sistemelor optice de
detectare a obiectelor creste considerabil prin folosirea fibrelor
optice(fig.10).
Flexibilitatea utilizarii sistemelor optice de
detectare a obiectelor creste considerabil prin folosirea fibrelor
optice(fig.10).
Fig.10: Utilizarea fibrelor optice.
In acest caz, exista posibilitatea inglobarii sistemelor in interiorul subansamblelor si mecanismelor cu gabarite reduse, creste siguranta de detectare a obiectelor, exista posibilitatea detectarii in zone cu temperaturi ridicate (prin scoaterea din aceasta zona a sursei (1) si a receptorului de lumina (2). Sistemul poate fi utilizat in conditiile unor paraziti electromagnetici puternici, etc.
Din punct de vedere constructiv traductoarele de proximitate optice se realizeaza intr-o gama extrem de variata.
In figura 11 se prezinta o alta varianta constructiva de senzor de proximiate optic care lucreaza pe principiul reflexiei fluxului luminos emis. Cele doua surse de lumina (diode IR) si fototranzistorul receptor sunt pozitionate in aceeasi carcasa de forma cilindrica. Se remarca componentele constructive auxiliare - filtru optic, inel elastic "O", saiba elastica etc. - care servesc unei sigurante ridicate in emisia si receptia fluxului luminos. Carcasa senzorului este realizata din aluminiu eloxat.
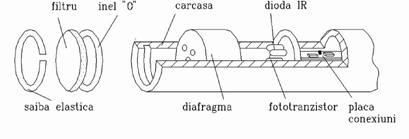
Fig.11: Senzor de proximitate optic.
In figura 12 se prezinta vederea expandata a unei solutii constructive de senzor de proximitate optic care lucreaza pe principiul intreruperii fluxului luminos
emis. Patrunderea obiectului de controlat intre cele doua brate ale carcasei obtureaza total sau partial fluxul luminos emis.
Fig.12: Vedere
expandata asenzorului
de proximiate optic.
O aplicatie a senzorului de proximitate optic, intrunul din modurile de functionare este de protectie la coliziune a dispozitivului de ghidare al robotului industrial.
Functionarea senzorului in acest caz se bazeaza pe prezenta fluxului luminos pe receptor prin reflexia in prealabil pe un obstacol sau piesa controlata. Senzorii optici, montati pe partea frontala a bacurilor efectorului, permit scanarea unor piese si determinarea unor caracteristici ale acestora. Dispunerea unui senzor cu fibre optice in efectorul final al robotului industrial IRb-60 (ASEA) pentru o aplicatie de sudura cu plasma, este prezentata in figura 13.
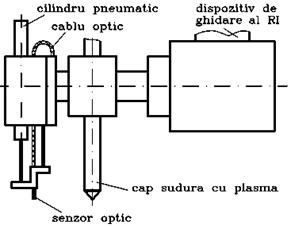
Fig.13: Senzor optic in efectorul
final al robotului IRb-60
Senzorul este utilizat pentru conducerea RI pe traiectoria impusa coordonului de sudura. Senzorii optici, montati in efectorul final, permit si orientarea acestuia in raport cu piesa de prehensat. In acest mod, in corelatie cu o comanda ierarhica, este posibila marirea independentei de lucru a efectorului prin reducerea cerintelor de precizie. Fiecare sensor contine un fotoelement emitator (E) si un fotoreceptor (R) legate prin cablu optic de echipamentele de prelucrare a informatiei.
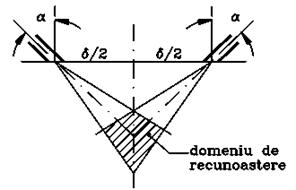 Razele de lumina emise
se intersecteaza astfel incat (fig.14):razele se afla in acelasi
plan, unghiul de deschidere este o
caracteristica a fotoelementului; distanta dintre componentele
senzorului este ; razele sunt inclinate cu unghiul fata de axa efectorului.
Razele de lumina emise
se intersecteaza astfel incat (fig.14):razele se afla in acelasi
plan, unghiul de deschidere este o
caracteristica a fotoelementului; distanta dintre componentele
senzorului este ; razele sunt inclinate cu unghiul fata de axa efectorului.
Fig.14: Domeniul de recunoastere al
senzorului
Domeniul de recunoastere este influentat de unghiul si distanta (fig.14). O distanta mare si un unghi mic ofera un domeniu de recunoastere ridicat dar precizie scazuta.
Dispunerea senzorilor in raport cu efectorul final este prezentata in figura 15.
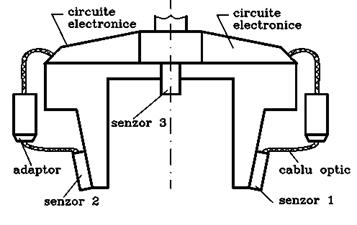
Fig.15: Dispunerea senzorilor
pe efector
Axa efectorului final se gaseste in planul de simetrie a unui piese (de exemplu cilindrice) daca semnalele celor 2 senzori sunt aceleasi. Senzorul 3 lucreaza pe principiul senzorilor de proximitate.
Dintre problemele evidentiate pe parcursul incercarilor au rezultat:
necesitatea obtinerii unor semnale de calitate superioara prin eliminarea neliniaritatilor si a compensarilor automate, prin reducerea sensibilitatii la perturbatii.
Gama de roboti IRB din care face parte si IRB 60 este produsa de
Robotul IRB 60 este unul din cei mai complexi, care e supranumit robotul cu 6 axe, a reusit sa copieze aproape cu fidelitate bratul uman, asta datorita multimii de senzori de la fiecare articulatie.
Poate fi folosit la diverse operatii din care putem aminti:
Operatie de taiere,
Operatie de sudura,
Sudura in arc,
Polizare,
Finisare,
Alte operatii special.

Fig.16. Vedere robot IRB 60

Fig.17: Sudarea cu Robotul IRB 60.
Bibliografie
Site - ul oficial al firmei Global Robots Ltd.
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |