Motorised Environmental Mapper & Autonomous Planter
Abstract
Acest articol reprezinta solutia noastra prin care tehnologia poate ajuta mediul inconjurator. Robotul nostru(Memap) exploreaza, cartografiaza, masoara pH-u si fertilitatea solului, analizeaza si luminozitatea medie a zonei, gasind astfel cel mai bun loc pentru a planta singur o seminta.
Introducere
De-a lungul timpului prin tehnologie am incercat sa ne usuram munca, ignorand astfel mediul inconjurator. Cu defrisari masive si cu specii pe cale de disparitie datorita braconajului, poluarii si dezechilibru climei, proiectul nostru incearca sa ajute natura.
Cu ajutorul unui robot noi putem explora mediu inconjurator, masurand astfel anumite informatii despre acesta precum:
Ph-ul solului, cu ajutorul unei sond
Fertilitatea solului
Luminozitatea medie a zonei explorate
Temperatura aerului
Altitudinea zonei si localizarea acesteia pe harta
Arhitectura sistemului
Robotul nostru inglobeaza mai multe sisteme si tehnologii precum:
a. Sisteme motori
Mobiltatea robotului este asigura de catre 4 motoare cotrolate autonom de catre robot sau de catre un utilizator. Motoarele sunt conectate la o punte H, care controleza sensul si viteza motoarelor prin comenzile receptate de la un microcontroller, conectat la calculator prin portul serial.
|
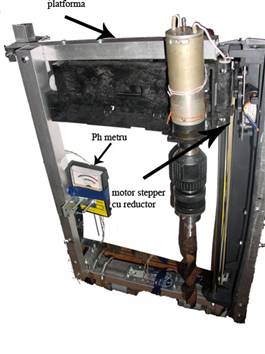
Forarea solului pentru plantare, se realizeaza cu ajutrul unui burghiu conectat la un motor controlat autonom de calculator. Pe suportul de coborare a burghiului, avem atasat si un ph-metru pentru aflarea aciditatii solului precum si fertilitatea acestuia. |
Fig. 0 - Sistemul de coborare din spatele robotului |
Sistemul de plantare este format dintr-un servomotor controlat de calculator
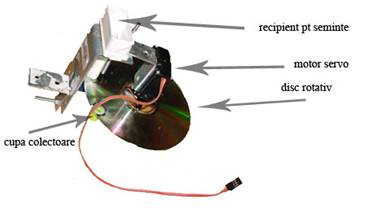
Fig. 1 - Separatorul de seminte
b. Sisteme receptive
Sistemul de viziune stereo ajuta la detectare obiectelor si distanta acestora fata de robot. Sitemul este format din 2 camere web Microsoft VX-6000 puse in paralel, algoritmul nostru cauta din cele 2 imagini, obiecte aseamanatoare si unghiul lor fata de fiecare camera. Putem forma un triunghi avand 2 unghiuri si o latura (distanta dintre camere), ramane de calculat celelate 2 laturi reprezentand distanta fata de fiecare camera.
Fig. 2 - principuil de functionare
Al doilea sistem de detectare a distante si prevenire coliziunei foloseste 6 dispozitive formate dintr-un led emitator de infrarosu si un receptor de infrarosu.
Pentru a calcula luminozitatea foloste 4 diode fotorezistente. Robotul calculeaza luminozitatea intr-o zona la anumite intervale de timp pentru a oferi un rezultat cat mai precis.
Robotul pentru a obtine informatii mai exacte asupra climatuilui acelei zone are si un termometru electronic conectat la un microcontroller.
Reciverul GPS SiRFStar III ii permite acestuia sa construiasca o harta cu pozitii exacte, si sa parcurga anumite trasee date de utilizator.
Aceste sisteme ii permit robotului sa fie autonom prin faptul ca evita coliziunea, parcurge eficient o zona si construieste o harta cu obstacolele zonei respective pentru a genera un traseu cat mai eficient.
Evitarea coliziunii sa face folosind:
Sase dipozitive de emitere si receptare de infrarosu( Fig. 3). Unda emisa de led se reflecta de obiectele din apropiere si in functie de timpul de receptionare putem afla distanta obiectului celui mai apropiat de dispozitiv.

Fig. 3 emitator si receptor de infrarosu
|
d = (t1-t2)*c |
||
|
d= distanta |
(t1-t2) diferente de timp de la emitere pana la receptare |
c=viteza lunimii |
Ecuatia 1
Sistemul de viziune stereo( Fig. 4) foloseste doua camere VX-6000 puse in paralel iar folosind un algoritm complex de cautare pe linii a segmentelor de culori. Algoritmul compara linie cu linie cele doua imagini obtinute iar obtinand diferenta in pixeli a pozitiilor celor doua segmente, putem calcula unghiul fata de camere. In fig. 5 puteti vedea primele testeri alea algoritmului, unde cu cat sunt mai inchise culorile obiectul este mai indepartat, iar analog cu cat sunt mai deschise cu atat obiectul este mai aproape( exceptand albul care reprezinta zone negasite)

Fig. 4 doua webcam-uri VX-6000 puse in paralel
|
α=(x1 - x2)*(640/72) |
||
|
640 rezolutia pe o linie |
72 unghiul de vizualizare |
x1 si x2 pozitile segementelor |
Daca ![]() atunci
obiectul este foarte indepartat.
atunci
obiectul este foarte indepartat.
Daca ![]() atunci
obiectul se afla la distanta detectabila minima.
atunci
obiectul se afla la distanta detectabila minima.
Ecuatia 2
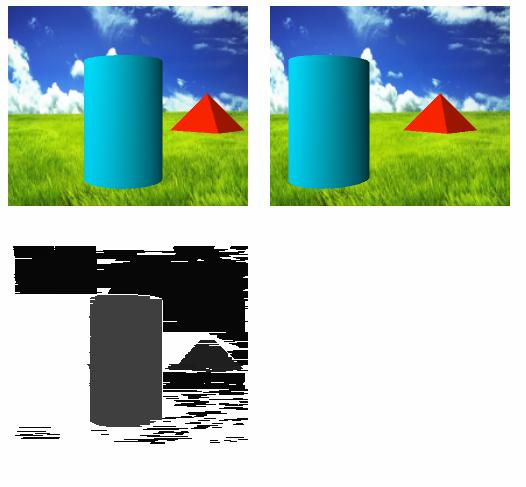
Fig. 5 primele testari ale algorimului
Robotul folosind un simplu algoritm de detectarea a miscarii poate capta animalele sau oamenii in miscare, poza pe care o va uploada pe server pe langa alte informatii despre zona.
Pentru afisarea unor informatii robotul are atasat un ecran LCD( Fig. 6).

Fig. 6
Tenologii folosite:
Windows XP
.NET Framework 2.0
.NET Compact Framework
Visual Studio Professional
Dispozitiv mobil (pocket device + GPS) Mio A701
PIC microcontroler 16f628a
Microcode Studio Plus
ICprog
ASP .NET
SQL Server
Planuri pentru viitorul apropiat
Deocamdata robotul are o autonomie de aproximativ 2 ore dupa care trebuie conectat la priza pentru reincarcarea acumulatorilor. Dar cu achizitionarea a doua panouri solare BP Solar SX-330J, 30 Watt Solar Panel va putea elinina nevoia de incarcare de la o priza, si de asemenea ar putea parcurge distante pana la zeci de kilometrii.
Pentru a se deplasa mai usor cat si pentru a depasi anumite obstacole, rotile robotului vor fi inlocuite cu roti de tanc preferabil din cauciuc.
Contact
Birgu Florin - Colegiul National "Ferdinand I",
Barna Victor -Colegiul National "Liviu Rebreanu", Bistrita- victorb@microcad.ro
Spataru Cosmin - Colegiul National "Ferdinand I", Bacau - jaguarb28@gmail.com
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |