
STUDIU TEORETIC SI EXPERIMENTAL AL LUBRIFICATIEI CONTACTELOR ECONFORME IN MEDII POROASE
1. PREAMBUL
Cunoscuta in special pentru problemele de curgere in volume poroase rigide, specifice unor sisteme tehnologice, precum cele de filtrare sau cataliza chimica, materialele poroase au inceput sa fie analizate din ce in ce mai mult pentru realizarea unor solutii de lubrificatie. Este cunoscut faptul ca, in ultimii ani, materialele stratificate cu caracteristici elastice si poroase sunt din ce in ce mai utilizate la realizarea protezelor pentru articulatiile umane. De asemenea se preconizeaza si posibilitatea dezvoltarii unor sisteme portante bazate pe ceea ce se cheama lubrificatie prin dislocatie. Analiza comportarii acestor straturi in conditiile unei miscari tangentiale, sau normale a constituit obiectul multor studii teoretice si experimentale. Dintre acestea se evidentiaza lucrarea de pionierat a lui McCutchen [1] care a analizat efectul porozitatii stratului compliant in conditiile unei permeabilitati constante, pentru miscarea de squeeze. Multe alte modele au fost dezvoltate, intre care o parte in cadrul Catedrei de Organe de Masini si Tribologie, sub indrumarea Prof. Dr. Ing. Mircea Pascovici. Marea majoritate a acestora se refera la modele de miscare de apropiere in conditii axial simetrice in care se aplica diverse ipoteze de curgere, ca exemplu lubrificatie prin dislocatie [2], in care cugerea se desfasoara exclusiv in stratul poros deformat de corpul rigid conjugat, sau modelele in care curgerea se produce atat in stratul poros cat si in zona de deasupra acestuia, curgere hidrodinamica clasica [3].
De asemenea, in cadrul acelorasi categorii de studii teoretice se regaseste si problema lubrificatiei XPHD (lubrificatie prin dislocare) pe o configuratie de tip treapta, in conditiile miscarii de translatie. Acesta a fost realizata prin analiza cu diferente finte pe un domeniu dreptunghiular avand drept conditii la limita presiunea egala cu 0 [4].
In ceea ce priveste rezultate experimentale, prezentam ca modele de referinta studiul realizat de M.D. Pascovici si C.V: Suciu in cadrul [5] si studiul realizat de M. Ahmad [6]. Acesta din urma realizeaza studiul unui proces de apropiere in conditiile in care una din suprafetele in contact este poroasa. Curgerea este considerata atat in interstitiul dintre suprafete cat si in stratul poros rigid obtinut prin sinterizarea unei pulberi metalice.
In cadrul prezentului contract au fost realizate urmatoarele studii:
a) Realizarea unui model de curgere bi-dimensional (2D) poro-hidrodinamic rezolvat prin metode numerice (diferente finite) al unui caz de lubrificatie prin dislocare pentru cazul unei suprafete sferice .
b) Realizarea unor experimente de lubrificatie prin dislocatie, cazul miscarii de apropiere. Aceasta include: conceperea si construirea unui dispozitiv experimental, realizarea sistemului de achizitie digitala a informatiilor de grosime film, atat partea hardware cat si partea software, si realizarea experimentelor.
Problema lubrificatiei XPHD (lubrificatie prin dislocare) in miscare tangentiala a fost studiata, teoretic si experimental, intr-o prima faza pe o configuratie de tip treapta, in conditiile miscarii de translatie. Pentru a obtine o solutie analitica comoda modelul teoretic propus s-a bazat pe ipoteza curgerii unidirectionale (1D) [2]. In urmatoarea etapa s-a dezvoltat un model mai evoluat (2D), care include si curgerea laterala (pe directia z), cu scopul evaluarii modelului simplificat [4].
In cadrul presentului contract s-a studiat un
contact similar dar in conditiile in care suprafata rigida in
miscare este sferica. Configuratia geometrica studiata
este schematizata in Fig. 1. Este vorba de o suprafata
patrata in care se regaseste integral "urma" zonei de
contact. Patina mobila este "scufundata" in stratul poros definit
prin porozitatea e sau
compactitatea![]() dependente de deformarea (compactizare) produsa de catre
patina.
dependente de deformarea (compactizare) produsa de catre
patina.
Pentru rezolvarea problemei s-a utilizat metoda volumului de control, pe o retea cu pas constant pe ambele directii (Fig. 1). Ecuatia de conservare a debitului, scrisa pentru un volum de control oarecare din interiorul retelei este:
![]()
Daca pentru modelul
treapta ![]() pentru toate nodurile in afara celor
corespunzatoare treptei si
pentru toate nodurile in afara celor
corespunzatoare treptei si ![]() pentru
nodurile de pe treapta, pentru problema contactului sfera rigida
strat poros plan debitul este functie de gradientul grosimii stratului
poros pe directia miscarii (dh/dx).
pentru
nodurile de pe treapta, pentru problema contactului sfera rigida
strat poros plan debitul este functie de gradientul grosimii stratului
poros pe directia miscarii (dh/dx).
Urmatoarele ipoteze au fost facute:
a) suprafata sferica este aproximata cu una parabolica. Din aceasta rezulta grosimea filmului:
![]() (2)
(2)
unde
grosimea axiala rezulta in urma conditiei la limita ca
pentru ![]()
![]()
De aici
![]() (3)
(3)
b) debitele se scriu functie de diferenta de grosime film dintre nodul curent si nodul anterior lui
![]() i = 2m, j = 2n (4)
i = 2m, j = 2n (4)
A - aria celulei de diferente finite
U - viteza tangentiala
hi,j - grosimea stratului poros in nodul i,j
c) toate nodurile din exteriorul ariei circulare de contact au presiunea impusa
d) se considera ca pe partea divergenta a contactului se produce ruperea filmului si deci presiunea devine cea atmosferica. Ca urmare toate nodurile din partea divergenta a contactului unde presiunea de calcul este negativa capata valoare de presiune impusa 0
Pentru un nod oarecare (i,j) debitele sunt functii de gradientul de presiuni:
unde, evident, grosimea filmului, h si permeabilitea,![]() , au
valori calculate dupa grosimea de film specifica fiecarui nod.
, au
valori calculate dupa grosimea de film specifica fiecarui nod.
Rezolvarea s-a efectuat prin aplicarea unui algoritm iterativ Gauss-Seidell, avand drept conditie de finalizare a calculului ca eroarea relativa intre mediile valorilor in doua iteratii succesive sa fie mai mica decat 10-6.
Fig. 1. Schematizarea modelului cu diferente finite
In figura 2 este prezentata distributia tipica de presiuni, care pune in evidenta existenta curgerii bidimensionale si a unei zone mari de desprindere a filmului in partea divergenta a contactului. Presiunea maxima este atinsa cu putin inaintea punctului de grosime minima a filmului - axa de simetrie geometrica a contactului. De asemenea se poate observa ca, datorita modificarii mai mari a grosimii de film in zona centrala, si de aici a permeabilitatii, scaderea presiunii de produce mai repede axa curgerii decat in zonele laterale.
Fig. 2. Distributia de presiuni adimensionalizata
prin raportare la presiunea maxima
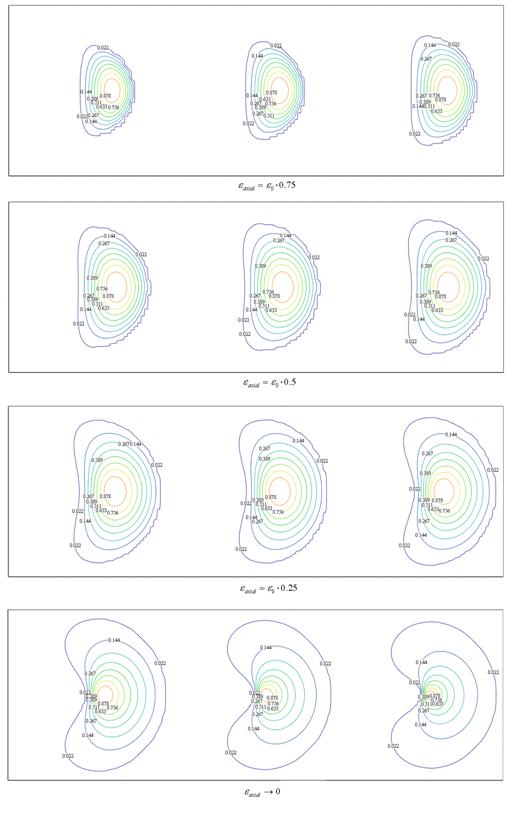
In figura 3 se prezinta evolutia conturului de presiuni (adimensionalizat) cu marirea gradului de strivire pentru diverse porozitati initiale. Se observa ca pentru aceeasi porozitate initiala, pr masura ce comprimarea creste forma de luna noua se accentueaza. De asemenea aceasta accentuare este mai vizibila cu scaderea porozitatii initiale.
Concluzii
In urma analizei numerice a rezultat ca:
a) pentru o configuratie geometrica data, inclusiv afundarea (data prin grosimea minima a filmului ha), forta portanta este proportionala cu viteza tangentiala si viscozitatea fluidului
b)
portanta maxima se atinge in cazul in care
afundarea este maxima, respectiv ![]() , unde
, unde ![]() este grosimea
initiala in stare nedeformata a stratului poros si
este grosimea
initiala in stare nedeformata a stratului poros si ![]() este gradul de compactitate calculat prin raportul dintre
volumul de material poros si volumul total.
este gradul de compactitate calculat prin raportul dintre
volumul de material poros si volumul total.
c)
Pe masura ce porozitatea creste,
prespectiv ![]() scade se
observa ca, prin afundarea mai mare, aria contactului creste
si de aici si portanta maxima. Pentru acelasi raport
scade se
observa ca, prin afundarea mai mare, aria contactului creste
si de aici si portanta maxima. Pentru acelasi raport ![]() portanta este
insa mai mica.
portanta este
insa mai mica.
Fara a incerca o definire completa se poate scrie portanta ca functie de parametrii geometrici, cinematici si de material in felul urmator:
![]() (6)
(6)
Determinarea functiei f , functie neliniara, reprezinta o problema pentru viitor. Pentru determinarea pe cale empirica se poate folosi algoritmul numeric. Programul utilizat pentru calculele numerice a fost scris in Pascal si este prezentat in Anexa 1
![]()
![]()
![]()
Fig. 3. Evolutia distributiei de presiuni cu porozitatea initiala
si gradul de comprimare maxim, exprimat prin porozitatea minima
presiuni adimensionalizate prin raportare la presiunea maxima
3 ACTIVITATEA EXPERIMENTALA
Scopul dispozitivului experimental este de a simula procesul de expulzare a filmului de lubrifiant in cazul unei cuple neconforme. Procesul de expulzare a filmului a constituit subiect de experimentare inclusiv in cadrul Catedrei Organe de masini si Tribologie. In acest caz insa se incearca o noua abordare, respectiv daca in cazul clasic suprafetele conjugate sunt conforme, respectiv plane (indiferent de forma acestora in plan), in cazul acesta se incearca testarea unui contact neconform. Contactul sfera plan prezinta complicatii din punct de vedere al ecuatiilor matematice ce guverneaza curgerea, insa aplicatia prezinta doua avantaje ce merita a fi precizate:
n contactul neconform este specific anumitor aplicatii; un caz este cel al articulatiilor umane
n aceasta abordare este mai toleranta la erorile de pozitionare. In timp ce in cazul contactului conform plan o eroare de pozitionare intre planurile conjugate relativ redusa duce la erori mari in ceea ce priveste comportamentul (viteza de apropiere in conditii de geometrie si de sarcina date), modelul contactului sfera-plan nu prezinta modificari in ceea ce priveste caracteristicile geometrice ale contactului in cazul unor erori de pozitionare unghiulare (Fig 4). Eventualele modificari ale comportamentului pot apare doar in cazul unei componente tangentiale a vitezei relative, ceea ce nu se poate produce decat in cazul unor erori constructive grosolane.
n
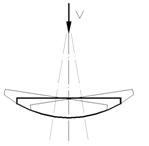
Fig. 4 Toleranta la erori unghiulare
In cadrul procedurilor experimentale se va incerca determinarea curbei de coborare a dispozitivului sub actiunea unei sarcini constante.
Fluidele utilizate in prima etapa experimentala, inclusa in prezentul referat, vor fi unsori consistente, considerate medii Bingham. Se preconizeaza pentru viitor si alte experimente, pentru cazul fluidelor pseudoplastice care vor simula comportamentul fluidului sinovial, precum si prin inlocuirea suprafetei plane rigide cu un strat poros deformabil.
Pentru trasarea curbei de coborare, tinand cont de durata de coborare, care uzual este de ordinul secundelor, va fi necesara realizarea unui dispozitiv de achizitie digitala a datelor in timp real.
Deoarece contactul sfera-plan este tolerant la diferentele unghiulare de pozitie, acesta permite modificarea completa a principiilor de aplicare a procedurii experimentale. Astfel, daca in cazul procesului de squeeze intre doua suprafete plane este necesara realizarea unui dispozitiv de translatie care sa asigure o foarte buna precizie de pozitionare in timpul glisarii, in cazul nostru se poate renunta la acest sistem extrem de dificill de realizat prin precizia ceruta componentelor, si care uzual induce forte de rezistenta semnificative. In locul lui se poate utiliza un simplu mecanism de rotatie de tipul unui lagar de alunecare, lagar pe rulmenti sau, ca in cazul solutiei finale alese pentru montajul nostru, sprijinire pe cutite. De asemenea momentul rezistent indus de frecarea in lagar devine nesemnificativ la o alegere judicioasa (suficient de mare) a lungimii celor doua elemente in miscare. O lungime suficienta este necesara si pentru asigurarea unei deplasari unghiulare reduse (sub un grad) in timpul procesului de squeeze (la parcurgerea unei distante de 2-3 mm).
Din punct de vedere al solutiei constructive problemele principale luate in considerare au fost: modul de incarcare, articulatia intre elementele in miscare si modul de determinare a variatiei grosimii filmului. Dintre diversele solutii considerate vom analiza aici doua.
Prima solutie considerata este una "evoluata". Incarcarea se asigura prin aplicarea fortei de greutate la un unghi variabil fata de directia de miscare. Aceasta presupune realizarea unui dispozitiv experimental cu posibilitatea de inclinare a ansamblului de brate de la pozitia orizontala pana la cea verticala.
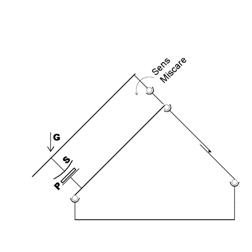
Fig. 5 Dispozitivul experimental varianta 1
Acest model prezinta cateva avantaje din punct de vedere al utilizarii:
n este posibila variatia liniara a incarcarii pe intregul interval 0.valoarea maxima
n nu este necesara folosirea de mase etalonate pentru incarcare
Modelul prezinta si unele complicatii constructive care, datorita conditiilor tehnologice, a materialelor disponibile si timpului alocat, au dus la abandonarea acestuia in favoarea unei solutii mai traditionale dar care este mai putin solicitanta din punctul de vedere al conditiilor materiale necesare. Dintre aceste complicatii enumeram doua:
n necesitatea utilizarii unor articulatii intre bratele in miscare de tip "inchis", respectiv capabile sa preia eforturi pe directii multiple nu doar pe o directie principala de incarcare cu mici abateri de la aceasta. Combinata cu necesitatea asigurarii unei precizii de functionare si a unor momente de frecare minime, aceasta presupune utilizarea unor lagare pe rulmenti sau de alunecare realizate in conditii industriale. Realizarea unor astfel de dispozitive in conditiile avute la dispozitie este dificila iar rezultatul nesigur.
n realizarea dispozitivului de variatie unghiulara implica doua articulatii suplimentare si un sistem de variere a lungimii elementului de sprijinire. Desi nu este imposibila, presupune consumarea unor resurse materiale si de timp suplimentare.
Cea de a doua solutie luata in considerare, solutie care a si fost pusa in aplicare, a fost una mai traditionala. S-a realizat un element "balansoar" care este asezat in echilibru (in fapt un usor dezechilibru spre partea cu contactul) pe un lagar-cutit. Acest sistem este incarcat cu mase etalonate al caror centru de greutate se afla aproximativ pe axa contactului sfera -plan. Aceasta permite considerarea fortei de incarcare ca fiind data exclusiv de greutatea maselor etalonate.
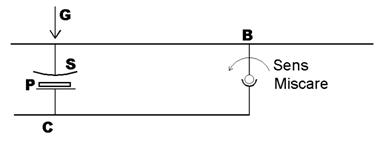
Fig. 6 Dispozitivul experimental varianta finala
Aparatele de masura sunt montate spre capatul liber al balansoarului. Din aceasta cauza valorile pe care acestea le vor indica vor fi amplificate cu un coeficient k, a carui valoare depinde de geometria ansamblului. De aceea valorilor indicate de acestea li se va aplica o corectie prin impartirea lor la coeficientul k .
Atat proiectarea cat si realizarea propriuzisa a standului a fost strans legata de materialele si fondurile avute la dispozitie avute la dispozitie. In figura 6 se pot observa toata componentele standului. Inainte de montare.

Fig. 7 Componentele inainte de montaj
Dispozitivul a fost structurat, pe principii de functionalitate si procedura de asamblare, in patru subansambluri:
n subansamblul corp, elementul baza care este in acelasi timp si unul din brate si elementul pe care se fixeaza sau se articuleaza celelalte subansamble

Fig. 8 Subansamblul corp
n subansamblul balansoar care realizeaza miscarea, transmite incarcarea, si pe suprafata caruia se sprijina aparatele de masurare a deplasarilor
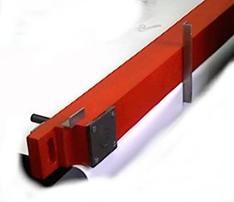
Fig. 9 Subansamblul balansoar
n subansamblul aparate de masura, fixat pe corp si care masoara prin contact deplasarea balansoarului. Se realizeaza in paralel masurarea cu aparat mecanic (comparator) si electronic (senzor inductiv)

Fig. 10 Subansamblul aparate de masura
n subansamblul declansator, gliseaza in lungul corpului si, in functie de pozitie, blocheaza corpul balansioarului la o anumita grosime de film (ajustabila) si elibereaza balansoarul prin deplasarea declansatorului.
Date tehnice:
n lungime: 480 mm
n latime: 160 mm
n inaltime: 206 mm
n masa (estimata): 20 kg
n masa celui mai greu subansamblu (estimata): 14 kg
n lungimea bratelor (distanta intre lagarul-cutit si axa principala a contactului: 380 mm
n coeficientul de corectie geometrica k: 1.32
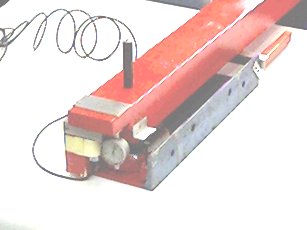
Fig. 11 Dispozitivul asamblat
3.2 Sistemul de Achizitie Digitala
Senzorul
A fost folosit un senzor inductiv modern functionand in conditii de alimentare cu tensiune continua. Schema exacta de functionare nu este prezentata de furnizor dar se cunosc caracteristicile tehnice ale acestuia:
n tensiunea nominala de alimentare 10 V
n sensibilitatea semnalului de iesire: 72 mV/V(tens. Alimentare)/mm
n cursa cu mentinerea liniaritatii semnalului de iesire 2.5 mm
Aceste caracteristici presupun ca, la alimentare nominala (10V), sensibilitatea senzorului ar fi de 0.72 V/mm. Insa conditiile experimentale nu au permis utilizarea unei surse de 10 V. In locul ei a fost folosita o sursa cu tensiunea nominala de 5 V dar care furnizeaza o tensiune masurata de aproximativ 6.5 V cu variatii de 2%. Acesta presupune ca nu se poate determina exact dependenta intre tensiunea de alimentare si deplasare. Pentru a depasi acest inconvenient se procedeaza la citirea pozitiilor initiala si finala pe comparator si realizarea, cu ajutorul unui program pascal, a conversiei voltajelor in deplasari.
Placa de achizitie
Placa de achizitie folosita este de tipul PC-LPM-16/PnP produsa de National Instrumets Corporation. Este o placa preformanta care permite achizitia in paralel pe 8 canale analogice cu rate de esantionare mult peste necesitatile experimentului.
Pentru experiment a fost folosit un singur canal, canalul 0. Rata de resantionare a fost limitata de software la 1000 citiri/secunda. In cursul experimentelor aceasta nu a fost un impediment deoarece s-au folosit rate de 2 citiri/secunda
Partea Software
Pentru manipularea placii de achizitie si salvarea datelor citite de aceasta a fost folosit un software de firma, LabView versiunea 4.1. Programul nu permite realizarea directa a achizitiei, oferind in schimb o serie de unelte cu ajutorul carora se realizeaza o aplicatie care satisface nevoile utilizatorului. Procesul este oarecum asemanator programarii, fiind necesara realizarea unui algoritm logic in care instructiunile sunt inlocuite de simboluri.
Produsul obtinut in acest mod este denumit Instrument Virtual deoarece, impreuna cu placa de achizitie, indeplineste aceleasi functiuni ca un instrument de masurare traditional. In felul acesta poate fi simulat un aparat precum un osciloscop sau un voltmetru (deoarece placa de achizitie inregistreaza tensiuni).
Pentru scopurile noastre a fost realizata o aplicatie care trebuia sa satisfaca urmatoarele necesitati:
n sa realizeze citirea datelor de la placa de achizitie, portul numarul 0
n sa realizeze o citire ciclica, cu numarul de puncte si rata de esantionare cerute prin interfata
n sa converteasca datele in valori de tensiune
n sa afiseze datele sub forma unui grafic tensiune/timp
n sa salveze datele in fisierul precizat de utilizator
Aplicatia a fost de asemenea realizata de autor. Pentru realizarea acesteia a fost necesara familiarizarea cu programul LabView, autorul fiind la primul contact cu acest program. Mai jos este prezentata aplicatia realizata: interfata utilizator si schema logica. Daca ne uitam la interfata aceasta pare simpla si usor de realizat. Gradul de dificultate este evident insa cand se prezinta schema logica a procesului.
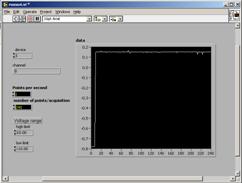
Fig. 12 Interfata aplicatiei
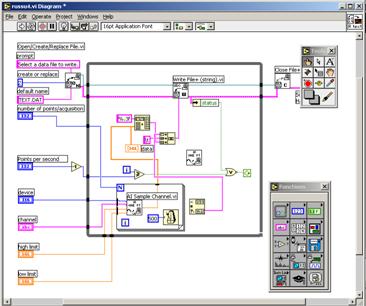
Fig. 13 Schema logica a aplicatiei
3.3 Prelucrarea Primara a Datelor
Transformarea informatiilor din voltaje in mm
Realizarea graficelor de deplasare in mm reprezinta primul pas al prelucrarii. Operatiunea se realizeaza cu ajutorul unui algoritm implementat in programul Pascal. In construirea acestui algoritm urmatoarele date au fost luate in considerare:
n datele de voltaje se regasesc in fisierele generate prin achizitia de date (nu sunt prezentate aici)
n datele de pozitie se citesc pe ceasul comparator
n voltajului initial ii corespunde hi, si similar pentru hf
n valorile inaltimilor masurate sunt in ordine inversa, respectiv h0 fiind valoarea maxima. Ele trebuie inversate si deplasate astfel incat h0=0.
n asupra lor trebuie aplicat coeficientul geometric de 1.28 care reprezinta raportul intre amplitudinea miscarii in dreptul aparatelor de masura si amplitudinea miscarii pe axa contactului.
In urmatoarele doua figuri se prezinta graficele unor seturi de date: cel initial, inainte de transformare si cel final, dupa transformare.
Fig. 15 Set de date finale. Informatii de grosime film
3.4 Prezentarea rezultatelor
S-au efectuat determinari de verificarea a functionalitatii standului si omologare a metodei din punct de vedere a tendintei calitative a proceselor. In acest sens prezentam figura 6 unde se pot observa curbele de coborare au aliura conform asteptarilor. De asemenea se poate observa ca la marirea fortei coborarea se face mai rapid, ceea ce confirma prezumtiile teoretice.
Fig. 15 Prezentarea curbelor sarcini diferite
4 CONCLUZII SI PERSPECTIVE DE CONTINUARE A STUDIILOR
In studiul de fata s-au prezentat studii teoretice originale focalizate pe modelarea lubrificatiei in conditii complexe. Rezultatele numerice obtinute, releva posibilitatea sigurarii portantei in cazul contactului sfera - plan poros, acesta asigurand o mai mare flexibilitate in utilizare decat alte modele de contact derivate din principiile lubrificatiei hidro-dinamice. Ramane de demostrat fiabilitatea acestei metode prin efectuarea unor studii experimentale.
In ceea ce priveste realizarea experimentelor pe standul conceput si realizat in cadrul acestui contract, dupa cum am mai precizat rezultatele corespund modelelor teoretice. Pentru verificarea cantitativa a modelarilor numerice si analitice este necesara insa efectuarea unor seturi de experimente metodice cu varierea succesiva a parametrilor de importanta: diametrul de sfericitate, diametrul zonei de contact, porozitatea, grosimea initiala a stratului poros, viscozitatea fluidului etc.
O parte a acestor studii a fost deja fructificata prin incorporarea in referatele de doctorat intocmite. Se intentioneaza prezentarea acestora si in cadrul unor conferinte nationale sau internationale precum si publicarea in reviste de specialitate.
C.W. McCutchen, "The Frictional Properties of Animal Joints", Wear, vol. 5, 1962, pp. 1-17.
M.D.Pascovici, "Lubrication by Dislocation: A New Mechanism for Load Carrying Capacity",
2-nd World Tribology Congress,
M.D. Pascovici, Russu Christian, Traian Cicone "squeeze film of conformal, layered, compliant and porous contacts", MTM 2004, Cluj Napoca 2004, pp 425,430.
M.D. Pascovici, Russu Christian, Traian Cicone "Modele Avansate, Teoretice si Experimentale, pentru Fundamentarea Lubrificatiei Elasto-Poro-Hidrodinamice" Grant CNCSIS A-463/2003
M.D. Pascovici, C.V: Suciu "Cercetari teoretice si experimentale ale lubrificatiei poro-elasto-hidrodinamice" Grant de cercetare al Academiei Romane (GAR 133/1998).
M. Ahmad Numerical and experimental investigation into porous squeeze films. Tribology International vol. 31 pp. 189-199 1998
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |