
Vibratii armonice libere neamortizate
Vibratii de translatie
Sistemul oscilant din figura 2.1 cuprinde o masa concentrata m care se poate deplasa dupa directia x, pe o suprafata orizontala. Un resort de rigiditate k este fixat la un capat de corp si la celalt capat de un suport imobil. In starea initiala resortul nu este deformat, iar corpul este imobil.
 Imprimad corpului o
mica deplasare la dreapta, de exemplu, acesta isi
paraseste pozitia de echilibru avuta initial.
Resortul se va alungi ca urmare a acestei deplasari, astfel ca in el
se va genera o forta elastica, orientata in sens contrar deplasarii.
Odata corpul lasat liber, asupra lui va actiona forta elastica
din resort, care-i va imprima o acceleratie orientata spre stanga.
Atunci cand corpul trece din nou prin pozitia de echilibru, forta
elastica devine egala cu zero, dar corpul are o viteza orientata
spre stanga. De aceea corpul isi continua miscarea in acest sens,
comprimand resortul. Forta elastica ce ia nastere in acesta va
fi orientata in sens contrar deformatiei resortului. Prin urmare,
viteza corpului este in continuare orientata spre stanga, in timp ce
acceleratia datorata fortei elastice, spre dreapta. Drept
rezultat, corpul se misca decelerat pana cand se opreste
intr-un punct situat la stanga pozitiei de echilibru. In absenta
oricaror frecari intre corp si suprafata pe care acesta se
deplaseaza, distanta cu care s-a deplasat spre stanga, relativ la
pozitia de echilibru, este egala cu deplasarea imprimata spre
dreapta, la momentul initial.
Imprimad corpului o
mica deplasare la dreapta, de exemplu, acesta isi
paraseste pozitia de echilibru avuta initial.
Resortul se va alungi ca urmare a acestei deplasari, astfel ca in el
se va genera o forta elastica, orientata in sens contrar deplasarii.
Odata corpul lasat liber, asupra lui va actiona forta elastica
din resort, care-i va imprima o acceleratie orientata spre stanga.
Atunci cand corpul trece din nou prin pozitia de echilibru, forta
elastica devine egala cu zero, dar corpul are o viteza orientata
spre stanga. De aceea corpul isi continua miscarea in acest sens,
comprimand resortul. Forta elastica ce ia nastere in acesta va
fi orientata in sens contrar deformatiei resortului. Prin urmare,
viteza corpului este in continuare orientata spre stanga, in timp ce
acceleratia datorata fortei elastice, spre dreapta. Drept
rezultat, corpul se misca decelerat pana cand se opreste
intr-un punct situat la stanga pozitiei de echilibru. In absenta
oricaror frecari intre corp si suprafata pe care acesta se
deplaseaza, distanta cu care s-a deplasat spre stanga, relativ la
pozitia de echilibru, este egala cu deplasarea imprimata spre
dreapta, la momentul initial.
Modelul sistemului fiind cel prezentat in figura
2.1, se poate trece la a doua etapa a analizei dinamice, care consta
in scrierea ecuatiei de miscare a masei concentrate dupa
directia x de oscilatie. Se
va folosi metoda izolarii corpurilor. In figura 2.2 s-a reprezentat corpul
de masa m si forta
elastica ce actioneaza asupra lui, ![]() . Scriind ecuatia de echilibru dinamic, conform
principiului al doilea, obtinem:
. Scriind ecuatia de echilibru dinamic, conform
principiului al doilea, obtinem:
![]()
![]()
Sau, sub forma echivalenta,
![]() (2.1)
(2.1)
Notand pulsatia proprie a sistemului oscilant prin:
![]() , (2.2)
, (2.2)
vom putea scrie ecuatia diferentiala de echilibru dinamic de forma:
![]() (2.3)
(2.3)
 Aceasta ecuatie
diferentiala de ordinul doi
este omogena, deoarece membrul drept este nul, iar coeficientii
ecuatiei sunt constanti, in ipoteza ca resortul are o rigiditate constanta
in timp. Pentru rezolvarea ei se cauta solutii de forma:
Aceasta ecuatie
diferentiala de ordinul doi
este omogena, deoarece membrul drept este nul, iar coeficientii
ecuatiei sunt constanti, in ipoteza ca resortul are o rigiditate constanta
in timp. Pentru rezolvarea ei se cauta solutii de forma:
![]()
unde r este o constanta reala ce se va determina, iar t este variabila temporala, t > 0. Derivand variabila x succesiv in raport cu timpul, se obtin viteza si acceleratia instantanee a corpului analizat:
![]() (2.4)
(2.4)
![]() (2.5)
(2.5)
Inlocuind in
ecuatia (2.3) expresia acceleratiei, va reazulta, dupa
impartirea ecuatiei prin termenul nenul ![]() , o ecuatie de gradul doi, cu necunoscuta r:
, o ecuatie de gradul doi, cu necunoscuta r:
![]()
![]() (2.6)
(2.6)
Solutiile complexe
ale acestei ecuatii sunt ![]() , astfel ca ecuatia (2.2) are solutia
generala:
, astfel ca ecuatia (2.2) are solutia
generala:
![]() , (2.7)
, (2.7)
in care constantele A si B se determina in raport cu conditiile initiale impuse sistemului oscilant.
Astfel, pentru cazul in care, la momentul t = 0, corpul a fost deplasat din pozitia de echilibru pe distanta x = xo si i s-a imprimat simultan viteza initiala vo, adica:
 (2.8)
(2.8)
Inlocuind prima conditie in ecuatia (2.7) se va putea afla valoarea constantei A,
![]() .
.
Pentru a inlocui si conditia referitoare la viteza corpului la momentul t = 0, se deriveaza ecuatia (2.6), dupa care se efectueaza calculul:
![]()
![]() .
.
Astfel avem:
![]() si
si ![]() (2.9)
(2.9)
Cu acestea, solutia generala a ecuatiei diferentiale a miscarii libere, neamortizate, a sistemului cu un grad de libertate, care efectueaza o miscare de translatie pe directie orizontala este:
![]() (2.10)
(2.10)
Daca, in plus, dorim sa evidentiem faptul ca miscarea este armonica, adica deplasarea instantanee este de forma exprimata prin (1.2), se pot face urmatoarele substitutii:
![]() si
si ![]() ,
,
astfel ca,
![]()
![]() (2.11)
(2.11)
Parametrii a si θ se pot deduce din relatiile de substitutie,
 ; (2.12)
; (2.12)
![]() (2.13)
(2.13)
Miscarea
descrisa de expresia ![]() sau formulata ca
suma de functii sin si
cos de acelasi argument
sau formulata ca
suma de functii sin si
cos de acelasi argument ![]() , este o miscare armonica, de perioada T, unde
, este o miscare armonica, de perioada T, unde
 [s]. (2.14)
[s]. (2.14)
Frecventa miscarii, definita, ca valoare numerica, drept inversul perioadei de oscilatiei, este:
 [Hz]. (2.15)
[Hz]. (2.15)
O miscare armonica cu faza initiala nenula poate fi urmarita in figura 2.3.
Miscarea
oscilatorie de translatie a unui corp de masa m poate avea loc si pe directie verticala, caz in care
intervine greutatea corpului, suspendat de resortul de rigiditate k, aflat initial in echilibru static
(fig.2.4). La echilibru, forta de greutate G este este egala si de sens
contrar cu forta elastica din resort, notata ![]() Prin
urmare,
Prin
urmare, ![]() . Daca se scoate corpul din pozitia de echilibru
prin deplasarea acestuia in jos, de exemplu, cu lungimea y, in resort va lua
nastere o forta elastica,
. Daca se scoate corpul din pozitia de echilibru
prin deplasarea acestuia in jos, de exemplu, cu lungimea y, in resort va lua
nastere o forta elastica,
![]() . (2.16)
. (2.16)
Izoland masa concentrata prin reprezentarea fortei de greutate si a fortei de legatura de tip elastic (fig. 2.5), se poate scrie ecuatia de echilibru dinamic a corpului pe directia verticala:
![]() , (2.17)
, (2.17)
unde ![]() este acceleratia
corpului de masa m. Ecuatia se mai poate scrie:
este acceleratia
corpului de masa m. Ecuatia se mai poate scrie:
![]()
Din relatia
statuata de echilibrul static, ![]() , rezulta
, rezulta ![]() , adica
, adica
![]() (2.18)
(2.18)
Comparand ecuatiile (2.1) si (2.18), se constata ca forma lor este identica din toate punctele de vedere, ceea ce permite exprimarea concluziei ca, indiferent de directia de oscilatie, miscarea corpului fixat elastic este de tip armonic, dupa cum se constata din expresia elongatiei instantanee (2.11).
Intr-un sistem supus vibratiilor este posibil sa existe mai multe resorturi (elemente elastice). Un resort, privit ca element elastic cu rigiditate constanta, poate avea mai multe forme constructive. Printre acestea se afla arcurile elicoidale de intindere compresiune, arcurile lamelare, arcurile spirale plane, bara de torsiune, bara solicitata la incovoiere, corpurile din cauciuc sau camerele cu aer. Actiunea combinata a mai multor elemente elastice trebuie, din considerente de simplitate a calculului, inlocuit cu un unic resort. Rigiditatea acestuia, numita rigiditate echivalenta, depinde de rigiditatea fiecarui element elastic al sistemului mecanic real.
Elemente elastice legate in serie
Sistemul de trei resorturi din figura 2.6(a) poate fi inlocuit de resortul echivalent (fig.2.6(b)).
Daca se aplica aceeasi deformatie x capatului liber al sistemului de resorturi si resortului echivalent, se pot scrie egalitatile:
![]() .
.
De aici decurge expresia
rigiditatii echivalente a unei grupari de resoarte legate in
serie, ![]() sau, in general,
pentru cazul a n resorturi,
sau, in general,
pentru cazul a n resorturi,
![]() (2.19)
(2.19)
b) Elemente
elastice legate in paralel
Sistemul de trei resorturi din figura 2.7(a) poate fi inlocuit de resortul echivalent (fig.2.7(b)).
Capatul mobil al fiecarui resort este fixat de o tija ce se poate deplasa de-a lungul unor ghidaje, astfel ca tija sa aiba un singur grad de libertate, miscarea ei fiind de translatie. Prin urmare, cele trei resorturi se deformeaza cu aceeasi valoare, ceea ce face ca raportul dintre forta individuala aplicata fiecarui resort Fi si rigiditatea acestuia sa fie acelasi pentru fiecare resort, dar si pentru resortul echivalent reprezentat in figura 2.7(b).
![]()
![]()
Egaland cele doua
rapoarte obtinute, rezulta expresia rigiditatii echivalente
a sistemului de trei resorturi legate in paralel ![]() , sau, in general, pentru n resorturi legate in paralel,
, sau, in general, pentru n resorturi legate in paralel,
 (2.20)
(2.20)
Vibratii de torsiune
Vibratiile de torsiune apar atunci cand un corp sub forma de disc este legat de suportul considerat fix prin intermediul unui arc bara de torsiune si efectueaza rotatii alternative in jurul unei axe care trece prin centrul barei (fig.2.8). Se presupune ca centrul de masa al discului se afla situat pe axa de rotatie, iar momentul de inertie al discului este J.
Bara de torsiune este un element
elastic cu rigiditatea kT.
La rotirea relativa a capetelor barei cu unghiul θ, se genereaza un moment de torsiune, de tip elastic, de
valoare Mt = kT.θ. Prin aplicarea
metodei izolarii corpurilor, conform figurii 2.9, se poate scrie
ecuatia de echilibru dinamic a discului rotit cun unghiul θ:
![]() , (2.21)
, (2.21)
unde J este momentul de inertie al discului relativ la axa verticala de rotatie. Deoarece Mt = kT.θ, vom obtine:
![]()
Raportul ![]() defineste
patratul pulsatiei proprii a sistemului care efectueaza
oscilatii de rotatie:
defineste
patratul pulsatiei proprii a sistemului care efectueaza
oscilatii de rotatie:
![]() (2.22)
(2.22)
Forma finala a ecuatiei diferentiale este:
![]() (2.23)
(2.23)
Aceasta ecuatie diferentiala de ordinul doi este omogena, deoarece membrul drept este nul, iar coeficientii ecuatiei sunt constanti, in ipoteza ca bara de torsiune are rigiditatea contanta in timp. Pentru rezolvarea ei se cauta solutii de forma:
![]() (2.24)
(2.24)
unde r este o constanta ce se va determina, iar t este variabila temporala, t > 0. Derivand variabila θ succesiv in raport cu timpul se obtin viteza unghiulara si acceleratia unghiulara instantanee a discului:
![]() (2.25)
(2.25)
![]() (2.26)
(2.26)
Inlocuind in
ecuatia (2.23) expresia acceleratiei, va rezulta, dupa
impartirea ecuatiei prin termenul nenul ![]() , o ecuatie de gradul doi, cu necunoscuta r:
, o ecuatie de gradul doi, cu necunoscuta r:
![]() (2.27)
(2.27)
Solutiile complexe
ale acestei ecuatii sunt ![]() , astfel ca ecuatia (2.23) are solutia
generala:
, astfel ca ecuatia (2.23) are solutia
generala:
![]() , (2.28)
, (2.28)
in care constantele A si B se determina in raport cu conditiile initiale impuse sistemului oscilant.
Astfel, pentru cazul in
care, la momentul t = 0, corpul a fost deplasat din pozitia de echilibru cu
unghiul exprimat in radiani θ = θ o si i
s-a imprimat simultan viteza initiala, ![]() , adica:
, adica:
 (2.29)
(2.29)
Inlocuind aceste prima conditie in ecuatia (2.28) se va putea afla valoarea constantei A,
![]() .
.
Pentru a inlocui si conditia referitoare la viteza corpului la momentul t = 0, se deriveaza ecuatia (2.28), dupa care se efectueaza calculul:
![]()
Pentru t =0, ![]() .
.
Astfel avem:
![]() si
si ![]() (2.30)
(2.30)
Cu acestea, solutia generala a ecuatiei diferentiale a miscarii libere, neamortizate a sistemului cu un grad de libertate, care efectueaza o miscare de translatie pe directie orizontala este:
![]() (2.31)
(2.31)
Conform celor mentionate in cazul oscilatiilor de translatie, expresia (2.31) descrie o miscare armonica,
![]() (2.32)
(2.32)
Perioada oscilatiei de torsiune, notata T, este:
 [s]. (2.33)
[s]. (2.33)
Frecventa miscarii, definita, ca valoare numerica, drept inversul perioadei de oscilatiei, este:
 [Hz].
[Hz].
Rigiditatea de torsiune a barei de torsiune se poate exprima in functie de lungimea l a tijei, de momentul I de inertie al tijei reltiv la axa de rotatie si de modulul de elasticitate transversal G al materialului barei.
Rigiditatea la torsiune a unei bare cilindrice, avand sectiunea constanta de diametru d, se poate exprima prin relatia:
![]()
unde ![]() , iar G este modulul de
elasticitate transversal al materialului barei.
, iar G este modulul de
elasticitate transversal al materialului barei.
Daca bara de torsiune nu are diametru constant, fiind este constituita din mai multe tije de diametre diferite, dar cu aceeasi axa de simetrie, ea poate fi inlocuita cu o tija din acelasi material, cu un diametru constant, a carei rigiditate este egala cu a barei de torsiune in forma reala. De exemplu, se considera o tija cilindrica formata din doua tronsoane, unul de lungime l1 si diametru d1, iar al doilea de lungime l2 si diametru d2. Daca ea se inlocuieste cu o tija de diametru constant d1, lungimea barei de torsiune echivalente va fi:
 .
.
Vibratiile de torsiune ale angrenajelor cu roti dintate
Se considera un angrenaj format din doua roti dintate, al carui raport de transmitere este egal cu i12. O roata este fixata de un suport imobil prin intermediul unei bare de torsiune de rigiditate k1T, iar a doua roata este montata la capatul unui arbore de rigiditate k2T. La celalalt capat al arborelui s-a montat un disc cu momentul de inertie J. Arborii pe care sunt montate rotile dintate sunt sprijinite pe lagare care nu au fost reprezentate. In sistemele mecatronice de mici dimensiuni, se pot neglija momentele de inertie ale rotilor dintate si ale elementelor constructive pe care sunt montate (fig.2.10).
Discului i se
aplica o rotatie unghiulara de valoare θ, care determina scoaterea sistemului din starea de
echilibru stabil.
Raportul de transmitere al angrenajului din figura 2.10 este exprimat in functie de razele de rostogolire ale rotilor dintate 1 si 2:
![]()
Figura 2.11 prezinta corpurile izolate, precum si momentele de torsiune de natura elastica ce actioneaza asupra lor. Este reprezentat si momentul de torsiune proportional cu acceleratia unghiulara a volantului, al carui moment de inertie J este considerat cu cateva ordine de marime superior momentelor de inertie ale rotilor dintate, care au fost neglijate. In acest sistem, masa concentrata, de care s-a discutat la sistemele cu miscare de translatie, a fost inlocuita de momentul de inertie concentrat J. Problema este mai complexa datorita prezentei a doi arbori, priviti ca elemente elastice avand rigiditatile k1T si k2T, legati prin intermediul angrenajului cu raport de transmitere diferit de valoarea 1.
La nivelul angrenajului, in ipoteza transmisiei puterii de la o roata dintata la cealalta fara pierderi de energie prin frecare, se poate scrie egalitatea ce decurge din forta tangentiala comuna in punctul de contact al danturii rotilor:
![]()
![]()
![]()
unde ![]() este momentul de torsiune existent
la arborele rotii 1, iar
este momentul de torsiune existent
la arborele rotii 1, iar ![]() este valoarea momentului de torsiune
transmis de la arborele 1 la arborele 2.
este valoarea momentului de torsiune
transmis de la arborele 1 la arborele 2.
Arborele 1 se afla in echilibru sub actiunea momentelor de torsiune datorat fortei elastice din arborele 1, egal cu produsul k1T.φ.i12, resprectiv a momentului datorat fortei elastice din arborele 2, transmis prin angrenaj la arborele 2 :
![]()
Din relatia anterioara se poate exprima unghiul de rotatie φ al rotii 1 in functie de unghiul de rotatie al volantului, θ:
![]()
Aplicarea teoremei momentului cinetic pentru arborele 2, asupra caruia actioneaza momentul de torsiune datorat fortei elastice si momentul transmis prin angrenaj de la roata 2, permite scrierea urmatoarei ecuatii de echilibru :
![]()
In ecuatia de echilibru a momentelor se substituie expresia unghiului φ si se obtine:
Dupa efectuarea calculelor, rezulta forma finala a acestei ecuatii de echilibru dinamic:
![]()
Cei doi arbori cuplati prin intermediul unui angrenaj constituie un element elastic cu o rigiditate de torsiune echivalenta avand expresia:
![]()
Se observa ca ecuatia de echilibru mecanic permite stabilirea expresiei pulsatiei proprii a ansamblului studiat:
Circuite electrice ideale oscilante. Oscilatii libere
Se considera circuitul din figura 2.12. Generatorul electric cu tensiune constanta U incarca un condensator cu capacitate C, cand intrerupatorul este inchis pe pozitia 1. Dupa finalizarea incarcarii condensatorului cu sarcina electrica, intrerupatorul este deplasat pe pozitia 2. Sarcina acumulata pe armaturi se descarca prin bobina de inductanta L. Daca se conecteaza in paralel cu acest circuit bobina-condensator un osciloscop, pe ecranul acestuia se va putea evolutia in timp a curentului in circuit.
 Din teoria circuitelor electrice, se cunoaste
ca ecuatia de tensiuni pentru circuitul format din condensatorul C
si bobina L este:
Din teoria circuitelor electrice, se cunoaste
ca ecuatia de tensiuni pentru circuitul format din condensatorul C
si bobina L este:
![]()
Aceasta ecuatie integro-diferentiala se poate reformula prin inlocuirea curentului instantaneu i(t) cu necunoscuta q(t), sarcina acumulata pe armaturile condensatorului la momentul t. Se stie ca:
![]() , sau
, sau ![]() .
.
Cu acestea, ecuatia diferentiala ce descrie functionarea circuitului va capata forma:
![]()
In urma impartirii la valoarea inductantei L, se obtine:
![]()
Similar sistemelor mecanice, se definete pulsatia proprie a circuitului electric oscilant:

Solutia ecuatiei diferentiale va fi:
![]()
in care constantele A si B se determina in raport cu conditiile initiale impuse circuitului oscilant.
Astfel, in cazul circuitului
electric din figura 2.12, la momentul t = 0, pe armaturi se poate acumula
o sarcina electrica q = qo,
dar nu se poate vorbi de un curent initial, ![]() :
:
Din relatiile (2.9) si (2.10), prin corespondenta marimilor fizice implicate, reiese ca expresia sarcinii instantanee este:
![]() ,
,
iar cea a intensitatii curentului in circuit:
![]() .
.
Analogii intre circuitele electrice si sistemele oscilante mecanice neamortizate
Ecuatia diferentiala a carei solutie este pozitia momentana x(t) a corpului punctiform de masa m care este legat elastic de un perete rigid a fost dedusa anterior si are expresia:
![]()
Sarcina de pe armaturile unui condensator de capacitate C, element al unui circuit oscilant ce mai cuprinde si o bobina de inductanta L este solutie a unei ecuatii similare:
![]()
Similitudinea formala intre cele doua ecuatii a permis introducerea unei analogii intre sistemele oscilante electrice si sistemele mecanice oscilante, constituite din mase concentrate. Din cele de mai sus decurge existenta unei corespondente intre pozitia momentana x(t) a masei m si sarcina momentana q(t) acumulata pe armaturile condensatorului. Prin extensie, aceeasi corelatie se poate formula intre viteza momentana v(t) a corpului m si curentul instantaneu i(t), ca marimi calculate prin operatia matematica de derivare a primelor doua marimi fizice mentionate.
De asemenea, se poate exprima o corespondenta intre masa m a corpului care oscileaza si inductanta L a bobinei circuitului electric, precum si intre rigiditatea k a resortului si inversul capacitatii C a condensatorului.
O alta analogie se poate introduce intre tensiunea U la bornele condensatorului si o forta F aplicata static, care scoate corpul de masa m din pozitia de echilibru, deformand resortul cu o valoare initiala xo.
Marimile prezentate anterior pot fi structurate intr-un prim tabel, care se poate complecta ulterior.
Tabel: Analogii intre marimile sistemelor oscilante de tip mecanic si electric
|
Marime mecanica |
Marime electrica |
|
Deplasare x |
Sarcina electrica q |
|
Viteza v |
Intensitate a curentului electric i |
|
Masa m |
Inductanta bobinei L |
|
Rigiditatea resortului k |
Inversul capacitatii condensatorului 1/C |
|
Forta F |
Tensiune electrica U |
Elemente elastice cu caracteristica neliniara
Studiul experimental al comportarii unui element elastic atunci cand sufera deformatii mari arata ca dependenta dintre solicitarea exterioara (forta sau moment) si deformatie (liniara sau unghiulara) nu este liniara decat, eventual, intr-un domeniu limitat de lucru al resortului respectiv. Un exemplu binecunoscut este cel al membranelor metalice plane si gofrate, a caror caracteristica poate fi liniarizata numai in domeniul deformatiilor mici.
Determinarea pulsatiei proprii a unui ansamblu format dintr-o masa concentrata si un resort cu caracteristica neliniara se face, uzual, prin determinari experimentale.
Exemplul 1
O bara orizontala de masa m = 250 g este sprijinita la capete cu ajutorul a doua arcuri lamelare (fig.2.13), fiecare avand constanta elastica k = 430 N/m. Sa se determine pulsatia si frecventa micilor oscilatii orizontale libere ale masei m.
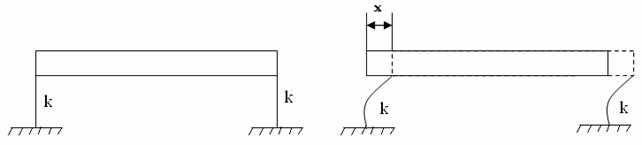
Fig.2.13
Rezolvare:
Cand bara de masa m paraseste pozitia de echilibru si efectueaza mici oscilatii pe directie orizontala, este solicitata de forta elastica a doua arcuri lamelare legate in paralel. Rigiditatea echivalenta arcurilor este egala cu suma rigiditatilor fiecaruia dintre ele, adica kech = 2k. Ecuatia de echilibru dinamic a sistemului cu un grad de libertate este:
![]()
Fromele echivalente ale acestei ecuatii, care permit exprimarea pulsatiei proprii sunt:
![]() , respectiv
, respectiv
![]()
Pulsatia proprie a sistemului oscilant va fi:
![]()
 58,65 s-1
58,65 s-1
Frecventa proprie corespunzatoare are valoarea:
![]() 9,34 Hz
9,34 Hz
Exemplul 2
Un subansamblu este reprezentat schematic in figura 2.14 sub forma unei tije verticale de masa m = 100 g si lungime L = 100 mm, articulata la capatul inferior. La capatul superior este fixata cu ajutorul a doua resorturi de masa neglijabila, fiecare de rigiditate k = 30 N/m. Sa se determine frecventa micilor oscilatii ale tijei in jurul articulatiei. Momentul de inertie al barei in jurul articulatiei este J = ml2/3.
Fig. 2.14
Rezolvare:
Tija verticala articulata in punctul O este scoasa din pozitia de echilibru. Figura din dreapta prezinta tija la un moment dat, cand a deviat cu unghiul θ de la pozitia verticala de echilibru. Acestei rotiri ii corespunde o deplasare liniara egala cu produsul x = θL, in ipoteza unor oscilatii cu mica amplitudine. Resorturile care sustin capatul superior al tijei vor fi deformate, arcul din stanga se va intinde, iar cel din dreapta se va comprima. Prin urmare, cele doua forte elastice care iau nastere sunt orientate permanent in acelasi sens, putand fi inlocuite cu o rezultanta egala cu suma lor:
![]()
Ecuatia de echilibru dinamic al tijei oscilante se stabileste prin exprimarea momentelor fortei elastice echivalente, cu bratul fortei egal cu lungimea L, si al fortei de greutate, cu bratul fortei egal cu lungimea L/2, fata de punctul O in jurul caruia se roteste tija.
Momentul fortei elastice echivalente este:
![]()
Momentul fortei de greutate este:
![]()
Teorema momentului cinetic genereaza ecuatia:
![]()
Forma echivalenta a acesteia, care permite evidentierea pulsatiei proprii este:
Pulsatia proprie se exprima prin:
Frecventa proprie se poate, astfel, evalua:
 = 40,62 Hz.
= 40,62 Hz.
Exemplul 3
 Un corp de masa m
= 0,5 kg aflat pe un plan inclinat (fig. 2.15) este fixat elastic de o
suprafata imobila prin intermediul unui resort de rigiditate k =
200 N/m. In momentul initial, corpului i se da o deplasare xo
= 0,02 m, si o viteza vo = 1,1 m/s. 1) Sa se descompuna forta de
greutate pe directiile x si y (conform desenului); 2) Sa se
scrie ecuatia de echilibru dinamic al fortelor pe directia de
oscilatie x; 3) Sa se determine pulsatia proprie a sistemului
oscilant; 4) Pe baza conditiilor initiale, sa se scrie expresia
elongatiei instantanee a corpului oscilant.
Un corp de masa m
= 0,5 kg aflat pe un plan inclinat (fig. 2.15) este fixat elastic de o
suprafata imobila prin intermediul unui resort de rigiditate k =
200 N/m. In momentul initial, corpului i se da o deplasare xo
= 0,02 m, si o viteza vo = 1,1 m/s. 1) Sa se descompuna forta de
greutate pe directiile x si y (conform desenului); 2) Sa se
scrie ecuatia de echilibru dinamic al fortelor pe directia de
oscilatie x; 3) Sa se determine pulsatia proprie a sistemului
oscilant; 4) Pe baza conditiilor initiale, sa se scrie expresia
elongatiei instantanee a corpului oscilant.
Rezolvare:
In figura 2.16 sunt prezentate componentele fortei de greutate pe directia paralela cu planul inclinat Gt, respectiv perpendicular pe planul inclinat Gn:
![]()
![]()
Componenta tangentiala a fortei de greutate este echilibrata de forta elastica din resort, in pozitia de echilibru, astfel ca ea nu mai intervine in oscilatia libera a corpului. Ecuatia de echilibru dinamic va cuprinde doar forta elastica si produsul dintre masa corpului si acceleratia instantanee:
![]()
sau, sub forma echivalenta,
![]()
Pulsatia proprie va fi:
![]()
Pentru conditiile initiale xo = 0,02 m si vo = 1,1 m/s, din relatia (2.10) se obtine expresia elongatiei instntanee a corpului:
![]()
Exemplul 4
Sa se determine frecventa proprie a vibratiilor de torsiune pentru dispozitivul din figura 2.17, constituit dintr-un disc al carui moment de inertie relativ la axa de simetrie este J si din doua tije cilindrice. Se cunosc: G.Ip = 214 N.m2, l = 0,2m; J = 35 kg.m2.
Rezolvare:
Discul este legat elastic la suportul fix prin intermediul a doua tije
elastice care se deformeaza cu acelasi unghi, egal cu unghiul de
rotatie al discului. Prin urmare, aceste elemente elastice sunt legate in
paralel. Rigiditatile lor individuale sunt ![]() si
si ![]() . Rigiditatea barei de torsiune echivalente va fi egala cu:
. Rigiditatea barei de torsiune echivalente va fi egala cu:
![]()
![]()
Pulsatia proprie se stabileste, conform definitiei, cu relatia:
![]()
De aici decurge valoarea frecventei proprii de oscilatie a discului in jurul axei de simetrie:
![]() Hz.
Hz.
Exemplul 5
Sa se calculeze frecventa proprie a oscilatiilor in jurul axei de rotatie a unui motor sprijinit ca in figura 2.18. Motorul este rezemat elastic pe o fundatie rigida prin intermediul a doua elemente elastice de rigiditati egale k si poate executa doar rotatii in jurul axei lui de simetrie. Pe celelalte directii, motorul este fixat rigid. Se presupune ca gentrul de greutate al motorului se afla pe axa de rotatie a acestuia. Se dau: momentul de inertie al motorului J = 3 kgm2, k = 250 000 N/m, distanta dintre axele elementelor elastice l = 0,8 m.
Rezolvare:
In ipoteza ca motorul efectueaza
oscilatii reduse ca amplitudine, se pot face aproximarile ![]() si
si ![]()
Tinand cont ca
in starea de echilibru, greutatea motorului a fost preluata de cele
doua resorturi, atunci cand motorul executa o mica rotatie
de unghi φ, cele doua
elemente elastice de sprijin vor fi deformate in sensuri contrare, unul fiind
comprimat, iar celalalt destins. Capatul liber al fiecarui
resort va avea deformatia egala cu ![]() , unde l este distanta
dintre axele celor doua resorturi. In fiecare dintre ele se va genera o
forta elastica exprimata prin relatia:
, unde l este distanta
dintre axele celor doua resorturi. In fiecare dintre ele se va genera o
forta elastica exprimata prin relatia:
![]()
La echilibru dinamic, din teorema momentului cinetic, se poate scrie ecuatia:
![]() ,
,
![]()
Dupa impartirea ecuatiei la J, se obtine expresia pulsatiei proprii a miscarii de oscilatie a motorului sprijinit elastic:
De aici decurge valoarea frecventei proprii de oscilatie a motorului in jurul axei de simetrie:
![]() Hz.
Hz.
Exemplul 6
Un pendul format
dintr-o tija verticala de masa neglijabila si lungime l = 80 cm are prevazut la un
capat o masa m = 200 g,
conform figurii 2.19. Oscilatiile in jurul articulatiei A sunt
controlate prin intermediul a doua resorturi de constante elastice k1 si k2. Stiind ca momentul
de inertie al masei m relativ la
centrul A de rotatie este ![]() , sa se gaseasca cele doua constante elastice astfel ca
perioada oscilatiilor libere sa fie T = 0,1 secunde, stiind
ca intre valorile lor exista relatia
, sa se gaseasca cele doua constante elastice astfel ca
perioada oscilatiilor libere sa fie T = 0,1 secunde, stiind
ca intre valorile lor exista relatia ![]() . Se dau a = 15 cm, b = 25 cm.
. Se dau a = 15 cm, b = 25 cm.
Rezolvare:
Tija de masa neglijabila poate efectua oscilatii in jurul articulatiei A. Se presupune ca amplitudinea acestor oscilatii este mica. In aceasta ipoteza, fortele elastice, care iau nastere in elementele elastice atunci cand tija se deplaseaza relativ la pozitia de echilibru cu unghiul φ, vor fi:
![]()
Aceste forte, impreuna cu forta de greutate a masei m fixate la capatul inferior al tijei, vor genera miscarea de revenire, echilibrata de momentul cinetic, conform ecuatiei:
![]()
Ecuatia diferentiala a miscarii masei legate rigid de tija va fi:
![]()
Pulsatia proprie a oscilatiei se exprima prin relatia:
![]()
Perioada pendulului din problema se calculeaza astfel:
Dupa efectuarea calculelor, se poate obtine expresia rigiditatii resortului k1:

Al doilea element elastic va avea rigiditatea egala cu:
![]()
Metode energetice de studiu al vibratiilor
Studiul oscilatiilor unui sistem se poate realiza prin rezolvarea ecuatiei de echilibru dinamic. O modalitate de stabilire a formei acestei ecuatii este aceea de scriere a ecuatiilor lui Lagrange.
In cazul particular al sistemelor cu un grad de libertate, exista un singur parametru variabil in timp ce descrie miscarea, si anume coordinata liniara sau unghiulara a corpului aflat in stare de vibratie. Pentru a evita desemnarea tipului coordonatei, acesta a fost denumita coordonata generalizata si a fost notata cu litera q.
Sistemul cu un grad de libertate este descris de o singura ecuatie a lui Lagrange, corespunzatoare singurei coordonate generalizate (deplasare liniara sau unghiulara):
![]()
unde E este energia cinetica a sistemului oscilant la un moment dat, iar U este functia de forta a sistemului.
Daca fortele sunt conservative, ecuatia se mai poate scrie si sub forma:
![]()
unde ![]() este functia lui Lagrange.
este functia lui Lagrange.
Exemplul
 Sa se studieze
miscarea unei bare omogene OA, de lungime l si masa m,
articulata in O si lasata sa oscileze liber intr-un
plan vertical (fig. 2.20), folosind ecuatia lui Lagrange.
Sa se studieze
miscarea unei bare omogene OA, de lungime l si masa m,
articulata in O si lasata sa oscileze liber intr-un
plan vertical (fig. 2.20), folosind ecuatia lui Lagrange.
Rezolvare:
Pozitia instantanee a pendulului OA este
caracterizata de unghiul φ(t) dintre tija pendulului si
verticala, la un moment dat. Acest unghi reprezinta coordonata
generalizata din ecuatia lui Lagrange. Derivata in raport cu timpul a
pozitiei unghiulare permite stabilirea vitezei unghiulare a tijei, ![]() . Cu aceasta, se poate exprima
energia cinetica a pendulului:
. Cu aceasta, se poate exprima
energia cinetica a pendulului:
![]()
unde J este momentul de inertie al tijei relativ la centrul O de
rotatie, ![]() . Astfel,
. Astfel, ![]()
Functia de forta U are expresia:
![]()
Termenii din ecuatia lui Lagrange sunt:
![]()
![]()
![]()
![]()
Ecuatia lui Lagrange devine:
![]()
sau
![]()
In cazul
oscilatiilor de mica amplitudine, ![]() , astfel ca miscarea pendulului este descrisa de
ecuatia diferentiala, fiind o miscare armonica.
, astfel ca miscarea pendulului este descrisa de
ecuatia diferentiala, fiind o miscare armonica.
![]()
|
Politica de confidentialitate |
| Copyright ©
2024 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |