Universitatea Politehnica din Bucuresti
Facultatea Transporturi
SIMULATOR DE ZBOR
Puntea de comanda este zona din fata a avionului, de unde pilotul controleaza aeronava si este compusa din toate instrumentele de dirijare si de comanda al acestuia.
Fig. 1.1 Puntea de comanda la avionul Diamond DA40
In imaginea de mai sus este prezenta puntea de comanda a avionului de mici dimensiuni numit Diamond DA40.
Incepand din partea stanga, de la locul comandantului, este pozitionata mansa in partea centrala a scaunului, inca una avand si secundul. Mansa este utilizata pentru miscarea profundorului care controleaza miscarile aeronavei in sus si in jos, pentru controlul eleroanelor, la miscarea in jurul axei longitudinale a aeronavei (viraje, tonouri). Ele mai pot avea montate si alte elemente de comanda cum ar fi: buton de emisie-receptie pentru statia radio, comanda trimerelor si un buton de decuplare a pilotului automat.
In partea centrala a cabinei se afla maneta de gaze, cea care controleaza turatia motoarelor, implicit viteza atinsa de avion si frana de parcare.
Pe panoul de comanda se intalnesc cele 6 instrumente de dirijare si anume vitezometrul, giroorizontul, altimetrul, indicatorul de viraj si glisada, girocompasul si variometrul.
Pedalele palonierelor permit miscarea directiei dar si a rotii de bot sau efectuarea franarii diferentiate.
Pe panoul secundului se afla statiile radio prin intermediul carora pilotul si secundul comunica intre ei, comunica cu turnul de control sau cu alte avioane. Statiile radio ajuta la selectarea frecventei radio corespunzatoare fiecarui turn de comanda.
Afisarea grafica este realizata prin intermediul placii video ATI Radeon HD 5770. Aceasta placa video permite extinderea imaginii pe 2 monitoare avand 2 iesiri de tipul DVI, o iesire HDMI si una DisplayPort.
Datorita tehnologiei ATI Stream se imbunatatesc timpii de codare video si ofera o performanta ridicata la rularea de continut video in aplicatii, ajutand la crearea de efecte vizuale imbunatatite pentru o calitate ridicata a imaginilor.
Conector DisplayPort![]()

Conector HDMI Conectori DVI-I
Fig. 1.2 Placa video Gigabyte ATI Radeon HD 5770
Microsoft Flight Simulator X este cel mai bun simulator de zbor creat vreodata pentru PC, de un realism incredibil, cu o grafica impecabila si care ofera o experienta de joc inovativa folosind cele mai avansate tehnologii de simulare de pilotaj.
Fiind unul din cele mai vechi, cunoscute si cuprinzatoare serii de simulatoare de zbor pentru PC, Microsoft Flight Simulator a fost un produs timpuriu in portofoliul Microsoft - diferit de celelalte programe, majoritatea fiind orientate inspre afaceri - depasind Windows cu trei ani.
Cele mai recente versiuni ale acestui simulator, MS Flight Simulator 2004 si noul MS Flight Simulator X au atras piloti veterani, viitori piloti si chiar oameni care candva au visat sa fie piloti. Fiind mai mult un mediu virtual foarte captivant decat un simplu joc, este uneori frustrant, complex si dificil din cauza nivelului mare de realism, dar poate fi si meritoriu pentru un flightsimmer priceput.
Un simulator de zbor este compus din :
Sistemul de calcul central care, prin intermediul aplicatiei software rulate, asigura generarea imaginilor si a scenariilor de zbor, folosite la antrenamentul pilotilor;
Monitoare de inalta definitie, care permit afisarea imaginilor care, in caz real, sunt vizionate de echipaj (pilot) la sol si in zbor: imagini din exterior, asa cum sunt acestea vazute pe geamurile avionului;
Monitor de instrumente: asigura afisarea instrumentelor de pe bordul avionului, astfel incat pe parcursul simularii sa se asigure informatiile de bord;
Plansa de bord, continand comenzi, echipamente si butoane luminoase care asigura preluarea comenzilor de la pilot catre sistemul de calcul simulator;
Structura mecanica de montaj si instalare a tuturor echipamentelor si butoanelor de comanda si control cat si a monitoarelor si a altor interfete de afisare grafica.
Simularea reprezinta imitarea unor lucruri reale, stare de fapt, sau proces. Actul de simulare a ceva, in general, atrage dupa sine reprezentarea caracteristicilor cheie a anumitor comportamente sau a unui sistem selectat fizic sau abstract.
Simularea este folosita in mai multe contexte, inclusiv in modelarea sistemelor naturale sau a sistemelor umane, pentru a obtine o perspectiva asupra functionarii lor. Alte contexte includ simularea de tehnologie pentru optimizarea performantelor, al ingineriei sigurantei, testare, instruire si educatie. Simularea poate fi folosita pentru a demonstra eventualele efecte reale ale conditiei alternative si cursuri de actiune.
Aspectele cheie in simulare includ achizitionarea de sursa de informatii valabile privind selectia relevanta de caracteristici cheie si comportamente, utilizarea si simplificarea aproximarilor, creerea de ipoteze in termen de simulare, fidelitate si de validabilitate a rezultatelor de simulare.
Un simulator de zbor este folosit pentru a instrui pilotii la sol. Acest simulator permite unui pilot sa faca un accident simulat cu "aeronava", fara a fi ranit (pilotul sau alte persoane). Simulatoarele de zbor sunt adesea folosite pentru a instrui pilotii pentru a putea pilota o aeronava in situatii extrem de periculoase, cum ar fi aterizari fara motoare, sau complete defectiuni electrice sau hidraulice. De obicei, un pilot de companie aeriana trebuie sa completeze o sesiune de simulator de formare profesionala, o data la fiecare sase luni. Pilotii noi la un anumit tip de aeronava, de obicei obtin calificative in simulator. Simulatoarele cele mai avansate au sisteme vizuale extrem de avansate si sisteme de miscare hidraulice.
Utilizarea simulatorului ca un training in prealabil este in mod normal mult mai ieftin decat daca s-ar face direct training pe aeronave.
Concept variat pentru controlul sistemului de miscare al simluatorului de zbor
Conceptul are legatura cu un sistem de simulare in miscare. Mai exact, are legatura cu un sistem dirijat prin intermediul semnalelor de comanda, acestea reprezentand atat pozitia cat si acceleratia. Sistemul cuprinde modalitati de combinare a ambelor sisteme de comanda.
Conceptul are legatura de asemenea cu modalitati de circuite pentru combinarea si procesarea semnalelor de pozitionare si accelerare si mai are legatura cu procurarea unui semnal de conducere a modalitatilor ce confera miscarea.
Fig. 2.1 Sistem de simulare in miscare
In controlul sistemelor de miscare ale simulatorului de zbor, sau al altor dispozitive folosite pentru a produce senzatia de miscare, acceleratia variabila este cea mai importanta, din moment ce acceleratia este cea care determina de fapt fenomenul miscarii. In sistemele conventionale, pozitia este cea considerata a fi cea mai importanta. Conceptul propus in aceasta aplicatie este de a amesteca controlul pozitiei si acceleratiei in asa fel incat acceleratia sa poata fi controlata la nivelul unei frecvente inalte in cadrul careia fidelitatea miscarii este cea mai importanta. In acelasi timp, se doreste controlarea pozitiei la frecvente mai joase pentru a mentine sistemul de miscare centrat in cadru.
Conceptul este implementat prin eliminarea semnalelor de control al pozitiei de frecvente ridicate si prin eliminarea semnalelor de control al acceleratiei de frecvente reduse. Semnalele de control ce rezulta din acest proces sunt amestecate pentru a se obtine un semnal combinat care dirijeaza simulatorul de miscare.
Scopul general al acestui concept este de a imbunatati performanta sistemului de miscare prin cresterea frecventei de raspuns.
Pentru a obtine acest lucru, dispozitivul de calcul este utilizat pentru a genera semnale electrice corelate cu pozitia dorita si cu accelerarea portiunii extensibile relativ cu portiunea fixa a membrului extensibil. Semnalele trec prin circuite electrice, astfel incat semnalul de pozitie opereaza la frecvente reduse si semnalul de acceleratie opereaza la frecvente inalte. Mai departe, un alt circuit electric combina semnalele rezultante si adauga semnale electrice care reprezinta combinatii de presiune in membrul hidraulic, pozitia curenta a portiunii extensibile, viteza curenta a portiunii extensibile si forta aplicata de membrul hidraulic. Semnalul rezultant este utilizat pentru a controla o valva electro-hidraulica, cu scopul regularizarii fluxului inspre numarul extensibil.
Utilizarea unei combinatii de semnale pozitionale si de acceleratie are o importanta sporita atunci cand acest principiu este aplicat unor sisteme folosite sa furnizeze o simulare de miscare realista ca aceea ce are loc in compartimentul echipajului din simulatorul de zbor.
Pentru a indeplini criteriile de eficienta, membrii extensibili utilizati trebuie sa aibe frictiune redusa. Dispozitivele electrice folosite pentru controlul membrului extensibil, trebuie sa opereze intre intervalele de frecventa in care acceleratia poate fi controlata.
Fig. 2.2 Schema bloc a circuitului de dirijare in miscare
Descrierea desenelor
Figura 2.1
In figura 2.1 se poate observa o platforma ce sustine cabina folosita pe durata utilizarii sistemului notata (1). Platforma este sustinuta de membrii extensibili (2). De obicei, acesti membrii extensibili sunt actionati hidraulic. Figura 2.1 ilustreaza un sistem in care 6 astfel de membrii extensibili sustin o platforma. Aceasta este o configuratie clasica, insa unele sisteme de miscare pot avea mai multi sau mai putini membrii extensibili.
Fiecare membru extensibil este controlat de o servo-valva (3), si cuprinde o portiune extensibila (5) care se afla la capatul celui mai apropiat de platforma membrului extensibil.
Lichidul hidraulic care actioneaza membrul extensibil provine de la sistemul de alimentare hidraulic (7) si este transportat prin furtunuri.
Semnalele electrice utilizate pentru a controla miscarea membrelor extensibile provin de la cabina de control (11) care contine circuite electronice ce raspund unor dispozitive de admisie provenite de la un calculator (nu apare in desen). Circuitele electronice combina semnalele de comanda cu semnalele electrice reflectand pozitia, forta si viteza.
Semnalul de forta al sistemului din Figura 2.2, este derivat dintr-un traductor de forta (13), localizat la punctul de contact dintre fiecare membru extensibil si platforma.
Sistemul de miscare ilustrat in figura 1, este capabil de 6 grade de libertate. Cu toate acestea exista sisteme de miscare ce au o libertate mai mica, conceptul fiind independent de geometria sau locatia membrelor extensibile.
Figura 2.2
In figura 2.2, semnalul de comanda al acceleratiei, este aplicat pentru jonctiunea insumata (21) in timp ce semnalul de comanda al pozitiei este aplicat pentru jonctiunea insumataa (22).
Semnalul de comanda al pozitiei aplicat jonctiunii insumate 22 este folosit pentru a mentine sistemul de miscare centrat in cadrul suprafetei, prin eliminarea semnalelor de comanda pentru variatii mari ale pozitiei.
Dupa cum vom putea observa mai departe, semnalele de comanda ale acceleratiei si pozitiei sunt combinate pentru a furniza un semnal de dirijare.
Dupa cum va fi apreciat, exista o suprapunere de frecventa intre comenzile de accelerare si de pozitionare. In cadrul frecventelor suprapuse, semnalele se anuleaza unele pe celelalte.
Un compensator de frecventa de jumatate de ordine (18) este adaugat cu scopul compensarii acestei suprapuneri de frecventa si pentru inlaturarea acestui defect.
Este necesara modificarea semnalului de control cu alte semnale reprezentative pentru pozitie, viteza, forta si distributia in masa a membrului extensibil. In acest scop, circuitul cuprinde blocurile 30, 40, 50, 60, 70 si 80. Dupa cum va putea fi observat, multe dintre variatiile acestui circuit pot fi vizualizate si proiectate.
Circuitul din figura 2.2 nu reprezinta altceva decat o infatisare particulara si operationala.
Luand in considerare blocurile din figura, blocul 30 reprezinta un integrator electronic folosit pentru a converti comanda de acceleratie intr-o viteza de semnal. Blocul 40 este un circuit limitat si impune limite pe vitezele maxime care pot fi controlate. Blocul 50 este un feedback al vitezei de circuit iar blocul 60 reprezinta un circuit compensator de viteza a carui functie va fi explicata in continuare.
Portiunea extensibila - 5 a membrului extensibil - 2, este sustinutp in cilindru de frictiuni reduse de rulmenti (15) si cuprinde traductoarele (11) si (13) aflate in cele doua capete. Traductorul 13 este un traductor de forta. Acesta determina un semnal electric corelat cu forta. Traductorul 11 determina semnale electrice ce reflecta pozitia si viteza portiunii extensibile (5) sau aranjamentul cilindrului si pistonului care compun membrul extensibil (2).
Circuitul lucreaza in felul urmator :
Un semnal de comanda al acceleratiei este aplicat jonctiunii insumate (21). In acelasi timp, comanda de accelerare este aplicata compensatorului de jumatate de ordine (18) a carui productie este determinata de jonctiunea insumata (22).
Un semnal pozitional de comanda este aplicat jonctiunii insumate (22) iar produsul acesteia este aplicat si jonctiunii insumate (21).
Ceea ce este produs de jonctiunea insumata (21) este procurat mai departe de circuitul integrat (30) pentru ca acesta sa furnizeze un semnal de viteza. Ceea ce rezulta in urma circuitului integrat este preluat de viteza care limiteaza circuitul (40), viteza revenind in final jonctiunii insumate (21).
Rezultatul integratorului este de asemenea preluat de jonctiunea insumata (19) unde este modificat de semnale electrice ce compenseaza pentru dinamica si absenta liniaritatii componentelor mecanice. Aceste semnale sunt derivate din circuitele 70, 80 si 90. Circuitul (70) compenseaza pentru absenta liniaritatii caracteristica componentelor mecanice, iar circuitul (80) compenseaza pentru caracteristicile de incarcare. Blocul (90) compenseaza pentru frecventa de raspuns a valvelor.
Rezultatul jonctiunii insumate (19) este apoi preluat prin intermediul circuitului (90) servo-valvei (3) care controleaza fluxul lichidului hidraulic in interiorul si in exteriorul membrului extensibil (2). Membrul (2), in desenul prezentat, contine un cilindru hidraulic astfel incat sa determine membrul extensibil, in acest caz pistonul (5), sa se extinda sau sa se contracte dupa cum se doreste.
Pozitia pistonului (5) este sesizata de traductorul (11) care determina un semnal electric pentru jonctiunea insumata (22) si, in plus, determina un semnal de compensare prin intermediul blocului (60) pana la jonctiunea insumata (24) si in cele din urma la jonctiunea insumata (19). Jonctiunea insumata (24) primeste de asemenea un impuls de la integratorul (30).
Miscarile pistonului care rezulta din semnalele care ajung la servo-valva, devin ulterior variatii de forta aplicate asupra compartimentului echipei de zbor din cadrul simulatorului, reprezentat de blocul 1, ca o masa fixa. Traductorul de forta (13) detecteaza aceste modificari si furnizeaza un semnal pentru a le compensa.
Afisarea informatiei de exterior (parbrize)
In cabina simulata de pilotaj, toate luminile care arata starea supapelor au doua stari (supapa inchisa = Off, supapa in tranzitie = luminoase, supapa deschisa = DIMM).
Fig. 2.3 Reflexia luminii in interiorul panoului
Pentru interior, s-au folosit doua led-uri de intensitate luminoasa mare cu un unghi de deschidere relativ mic. Dar cand sunt inclinate in mod corect, lumina emisa este destul de uniforma.
LED-uri pe placi sunt lipite in cabina cu doua picaturi de super glue. Acest lucru le fixeaza suficient de bine si permite indepartarea usoara daca unul dintre LED-uri trebuie sa fie schimbat.
Etichetele care sunt imprimate pe folie translucida, au un contrast scazut atunci cand LED-urile sunt stinse. Acest lucru este intentionat pentru a ajuta la imbunatatirea lizibilitatii panoului.
Fig. 2.4 Diferenta dintre un panou luminat si unul neiluminat
O data ce LED-urile sunt pornite, indicatoarele arata in mod clar mesajul lor.
Datorita suprafatei opace de sticla acrilica iluminarea este destul de uniforma. LED-urile de sub etichete nu sunt vizibile.
Smartcockpit.com
<miro> poze de la B737ng (systems)
Puntea de comanda este zona din fata a avionului, de unde pilotul controleaza aeronava si este compusa din toate instrumentele de dirijare si de comanda al acestuia.
Cabina
Fig. 2.5 Cabina avionului Boeing 737 NG
Cabina avionului din imaginea de mai sus este compusa din
2 scaune;
2 manse de control;
pedale atat pentru comandant cat si pentru secund;
panoul frontal ce contine instrumentele de navigatie si dirijare a avionului;
panoul electric si de control;
panoul deasupra capului;
aparate radio pentru comunicatii;
parbrize frontale si laterale.
Bordul in ansamblu
Fig. 2.6 Bordul avionului Boeing 737 NG
Sistemul comenzilor de zbor principale foloseste mansa conventionala, coloana si pedalele conectate mecanic la unitatile de control hidraulice care comanda suprafetele de control de zbor: eleroane, elevatoare. Aceste comenzi sunt alimentate de surse hidraulice suplimentare.
Comenzile pilotului
2 coloane de comanda;
2 manse;
2 perechi de pedale;
Maneta de frana rapida;
Maneta de control flapsuri;
Comutator de echilibrare de suprareglare;
Comutator de stabilizare a echilibrului;
Maneta de stabilizare a echilibrului;
Comutator de echilibrare eleroane;
Comanda de echlibru mansa;
Comutator amortizor de giratie;
Comutator principal flapsuri alternante;
Comutator de pozitie flapsuri alternante;
Comutatoare comenzi de zbor;
Comutatoare spoiler zbor;
Carma
Aceasta ofera comanda de amortizare in jurul axei vertical a avionului.
Fiecare set de pedale este conectat mecanic, prin intermediul cablurilor, de levierul unitatii principale si standby a carmei. Unitatea principala este alimentata de sistemele hidraulice. Unitatea standby va fi controlata de sistemul hidraulic standby.
Altimetrul
Altimetrul este un instrument cu care se masoara altitudinea (inaltimea) fata de un nivel de referinta (nu neaparat nivelul marii), aflat la bordul planoarelor, avioanelor (aparatelor de zbor). El indica inaltimea de zbor fata de nivelul aerodromului de decolare si se bazeaza pe principiul descresterii presiunii atmosferice, in raport cu inaltimea. De fapt el este un barometru, cu indicatii in unitati de inaltime.
 Utilizarea in planorism si aviatie a barometrului cu mercur este
practic imposibila, din cauza variatiilor relativ bruste de
viteza si inaltime si de aceea este inlocuit cu o
capsula metalica vidata, confectionata din tabla
foarte subtire. Peretii capsulei fiind foarte elastici, sub
actiunea presiunii atmosferice se deformeaza. Deformatia, proportionala
cu variatia presiunii exterioare, printr-un sistem de transmisie, este
condusa la un ac indicator, care se misca in fata unui
cadran gradat in unitati de inaltime.
Utilizarea in planorism si aviatie a barometrului cu mercur este
practic imposibila, din cauza variatiilor relativ bruste de
viteza si inaltime si de aceea este inlocuit cu o
capsula metalica vidata, confectionata din tabla
foarte subtire. Peretii capsulei fiind foarte elastici, sub
actiunea presiunii atmosferice se deformeaza. Deformatia, proportionala
cu variatia presiunii exterioare, printr-un sistem de transmisie, este
condusa la un ac indicator, care se misca in fata unui
cadran gradat in unitati de inaltime.
In cazul urcarii planorului (avionului), presiunea atmosferica scade, peretii elastici ai capsulei intalnesc o rezistenta mai mica, deci capsula se dilata, punand in miscare mecanismul de transmisie care, la randul lui, imprima acului indicator o miscare proportionala cu valoarea deformatiei. Pe cadranul aparatului sunt indicate atat unitati de presiune, cat si valoarea inaltimilor corespunzatoare.
Intrucat altimetrul ar indica inaltimea fata de nivelul marii, este prevazut cu un buton de 'calaj' (reglare sau aducere la zero), al carui rol este de a permite corectarea erorilor datorate variatiei presiunii atmosferice la sol, astfel ca aparatul sa indice intotdeauna, inaltimea fata de aerodromul de plecare. Aceasta operatie poarta denumirea de 'calaj altimetric'.
Girocompasul
Girocompasul sau compasul giroscopic este un aparat a carui functionare se bazeaza pe principiul giroscopului si se foloseste la indicarea directiei nordului adevarat, independent de influenta magnetismului terestru.
Fata de compasul magnetic, indicatiile girocompasului sunt mult mai precise, se pot transmite in mai multe locuri de pe nava si sunt influentate intr-o masura mai mica de miscarile navei.
 In schimb
girocompasul este un aparat complicat, susceptibil la avarii, necesita un
personal calificat pentru intretinere si nu este utilizabil decat
dupa 4-6 ore de la pornire.
In schimb
girocompasul este un aparat complicat, susceptibil la avarii, necesita un
personal calificat pentru intretinere si nu este utilizabil decat
dupa 4-6 ore de la pornire.
Primele giroscoape au fost construite la inceputul secolului XX.
Aparitia acestui nou aparat de navigatie a fost posibila in urma dezvoltarii matematicii si mecanicii. Teoria miscarii unui solid in jurul unui punct fix a fost pentru prima data studiata si elaborata in anul 1765 de Leonard Euler.
In anul 1852 Leon Foueaiult a demonstrat posibilitatea folosirii in activitatea practica a particularitatilor unui tor caruia i s-a imprimat o viteza mare de rotatie. In anul 1893 apare lucrarea lui A. S. Domorov, intitulata: "Despre giroscopul liber", in care teoria giroscopului este expusa pentru prima oara in mod amanuntit si riguros matematic.
Giroorizontul
 Giroorizontul sau orizontul
artificial este un instrument de bord
giroscopic utilizat pentru materializarea liniei orizontului, permitand
cunoasterea pozitiei unei aeronave fata de
acesta. Giroorizontul este utilizat in zborul automat si in cel
fara vizibilitate.Giroorizontul indica daca pozitia
aripilor este orizontala sau daca avionul este inclinat si
daca botul avionului este deasupra orizontului (cabraj) sau sub el
(picaj). Este un instrument de baza in cazul zborului instrumental.
Chiar si in cazul zborului la vedere este un aparat important,
indicatiile sale fiind foarte intuitive.
Giroorizontul sau orizontul
artificial este un instrument de bord
giroscopic utilizat pentru materializarea liniei orizontului, permitand
cunoasterea pozitiei unei aeronave fata de
acesta. Giroorizontul este utilizat in zborul automat si in cel
fara vizibilitate.Giroorizontul indica daca pozitia
aripilor este orizontala sau daca avionul este inclinat si
daca botul avionului este deasupra orizontului (cabraj) sau sub el
(picaj). Este un instrument de baza in cazul zborului instrumental.
Chiar si in cazul zborului la vedere este un aparat important,
indicatiile sale fiind foarte intuitive.
Giroorizontul este format dintr-un giroscop montat intr-o articulatie cardanica dubla (cu doua grade de libertate), astfel ca axa lui de rotatie sa ramana intotdeauna perpendiculara pe planul orizontal. Pe fata instrumentului se gaseste o macheta de avion, solidara cu carcasa. In spatele ei se deplaseaza o imagine a orizontului (orizontul artificial), solidara cu giroscopul. Orizontul este colorat intuitiv, de obicei cerul cu albastru deschis, iar solul maro. Inclinarea avionului este indicata pe scala din jurul aparatului, iar cabrajul sau picajul prin linii orizontale paralele cu orizontul mobil, gradatiile fiind de 5° sau de 10°.
Este destinat pentru a indica unghiul de ruliu (miscarea avionului in jurul axei longitudinale) in gama de ±90o fara limitare a evolutiei, iar a unghiului de tangaj (miscarea avionului in jurul axei transversale) in limitele de ±80o cu limitare la acesta valoare.
Lucreaza intr-un domeniu de temperatura de la -45o pana la +50o. Se alimenteaza de la un convertizor PAG-1F ce transforma curentul continuu de 27 V de la acumulator in curent alternativ de 27 V si 400 Hz. Pornirea se face prin actionarea butonului de comanda si cel de blocare a aparatului. Butonul de blocare se tine pe pozitia de baza ( tras) si se cupleaza la retea. Dupa cateva secunde, giroscopul are o turatie atat de mare, incat se poate elibera butonul de blocare, iar dupa turarea completa a giroscopului aparatul e optim pentru indicarea pozitiei in zbor.
Vitezometrul
Vitezometrul (folosit in aviatie) este un instrument de bord care indica viteza avionului (sau planorului), fata de fileurile de aer (masa de aer), in km/h.
Fiind un aparat "cu capsula", functionarea sa se bazeaza pe diferenta de presiune dintre presiunea statica si presiunea totala, captata pe o sectiune perpendiculara pe directia de inaintare a avionului (planorului).
 Capsula
aparatului este pusa in legatura cu orificiul unui tub (tub Pitot), amplasat in exteriorul aparatului de
zbor, paralel cu axa longitudinala, prin care se capteaza presiunea
aerodinamica totala, iar orificiile laterale ale tubului Pitot (de
presiune statica) printr-un alt tub sunt puse in legatura cu carcasa
etansa a vitezometrului, deci cu spatiul exterior al capsulei.
Astfel, presiunea statica din exteriorul capsulei va anula (scadea)
presiunea statica din presiunea totala aerodinamica, deci
capsula se va deforma, numai sub influenta presiunii dinamice, care este
proportionala cu viteza de inaintare a planorului (avionului).
Deformatia capsulei este transformata de sistemul de transmisie
si indicator, in unitati de viteza, adica va indica
viteza aparatului de zbor in km/h, fata de fileurile de aer (masa de
aer), nu viteza fata de sol.
Capsula
aparatului este pusa in legatura cu orificiul unui tub (tub Pitot), amplasat in exteriorul aparatului de
zbor, paralel cu axa longitudinala, prin care se capteaza presiunea
aerodinamica totala, iar orificiile laterale ale tubului Pitot (de
presiune statica) printr-un alt tub sunt puse in legatura cu carcasa
etansa a vitezometrului, deci cu spatiul exterior al capsulei.
Astfel, presiunea statica din exteriorul capsulei va anula (scadea)
presiunea statica din presiunea totala aerodinamica, deci
capsula se va deforma, numai sub influenta presiunii dinamice, care este
proportionala cu viteza de inaintare a planorului (avionului).
Deformatia capsulei este transformata de sistemul de transmisie
si indicator, in unitati de viteza, adica va indica
viteza aparatului de zbor in km/h, fata de fileurile de aer (masa de
aer), nu viteza fata de sol.
Indicatorul de viraj si glisada
Indicatorul de viraj si glisada sau giroclinometrul este un instrument de bord giroscopic utilizat pentru masurarea vitezei de giratie a avionului, fiind prevazut simultan cu un indicator care are rolul de a indica corectitudinea inclinarii in viraj.
Indicatorul de viraj
La baza functionarii indicatorului de viraj sta un giroscop cu doua grade de libertate, avand axa proprie de rotatie orientata dupa axa transversala a avionului si axa cadrului dupa axa longitudinala a avionului.
 Daca
avionul executa un viraj cu o anumita viteza de giratie,
axa cadrului este supusa unui moment proportional cu acea viteza
de giratie. Giroscopul executa o miscare de precesie in sens invers, cu un unghi
proportional cu valoarea momentului. Miscarea de precesie va fi
transmisa printr-o transmisie inversoare acului indicator, care se va
deplasa mai mult sau mai putin, in functie de viteza de giratie.
Precesia va dura pana cand momentul giroscopic va fi egalat de momentul
dezvoltat de doua arcuri fixate de cadru. Miscarea rotorului
giroscopului este intretinuta cu un motor electric.
Daca
avionul executa un viraj cu o anumita viteza de giratie,
axa cadrului este supusa unui moment proportional cu acea viteza
de giratie. Giroscopul executa o miscare de precesie in sens invers, cu un unghi
proportional cu valoarea momentului. Miscarea de precesie va fi
transmisa printr-o transmisie inversoare acului indicator, care se va
deplasa mai mult sau mai putin, in functie de viteza de giratie.
Precesia va dura pana cand momentul giroscopic va fi egalat de momentul
dezvoltat de doua arcuri fixate de cadru. Miscarea rotorului
giroscopului este intretinuta cu un motor electric.
Indicatorul de viraj are de obicei marcat pe el un reper pentru viteza de giratie standard. Aceasta viteza este de obicei de 3s pe secunda, adica de 180s pe minut. Aceasta ajuta la efectuarea virajelor pe baza cronometrarii in conditii de zbor instrumental (zbor fara vizibilitate). De exemplu, un viraj de 90s este efectuat in 30 s.
Indicatorul de glisada
Verticala aparenta este data de rezultanta ce apare in urma compunerii acceleratiei gravitationale cu acceleratia centrifuga. In zbor corect avionul trebuie asezat pe aceasta verticala. Rolul indicatorului de glisada este de a indica pilotului daca este corect corelata inclinarea avionului cu viteza de giratie sau, cu alte cuvinte, daca exista o corelatie corecta intre raza de curbura a avionului, viteza avionului si inclinarea acestuia.
Acest aparat este in principiu un pendul format dintr-un tub de sticla curbat umplut cu ligroina in interiorul caruia poate culisa o bila. Asupra bilei actioneaza greutatea ei si forta centrifuga. Pe tub exista doua repere pentru citirea verticalei aparente. Daca bila se afla intre repere, inclinarea avionului este corecta. Daca avionul executa un viraj si este prea inclinat, el va glisa (aluneca) spre interiorul virajului. Componenta greutatii bilei va depasi forta centrifuga, iar bila aluneca spre interiorul virajului, ceea ce indica glisarea avionului. Daca avionul este prea putin inclinat, el va derapa spre exteriorul virajului. Forta centrifuga ce actioneaza asupra bilei va depasi componenta greutatii, ceea ce face ca bila sa se deplaseze spre exteriorul virajului, ceea ce indica derapajul avionului. In zbor orizontal, orice inclinare a avionului face ca bila sa se deplaseze lateral, avertizand pilotul ca pozitia avionului nu este perfect orizontala.
In general, glisarea avionului nu este de dorit, deoarece creeaza rezistente aerodinamice sporite, ceea ce poate duce la pierderi de inaltime nedorite. In mod exceptional, ea poate fi folosita cand pierderea de inaltime este dorita, insa este o evolutie "acrobatica" dificila.
Variometru
Variometrul este un instrument de bord pentru controlul zborului, care
indica pe baza diferentei de presiune, viteza verticala de urcare (viteza ascensionala) sau cea de coborare a unei aeronave.
 Viteza se
masoara in metri pe secunda (m/s) sau in picioare pe minut
(fpm). Din punct de vedere constructiv se aseamana cu altimetrul. Partea principala a
instrumentului o constituie tot o capsula metalica, care
comunica cu un termos. Pe tubul de legatura exista un orificiu
capilar (tub capilar), prin care ansamblul capsula-termos comunica cu
exteriorul. Asupra peretilor capsulei actioneaza presiunea
statica a aerului atmosferic. In pozitie de repaus, presiunea din
interiorul capsulei va fi egala cu presiunea statica din exterior, datorita
tubului capilar. Acul indicator al aparatului se va afla in dreptul valorii
zero. Daca schimbam pozitia aparatului, mutandu-l la o
inaltime mai mare, presiunea din exteriorul capsulei va
scadea, ceea ce va determina dilatarea capsulei in urma
careia acul indicator al aparatului va indica urcarea. Prin tubul capilar,
diferenta de presiune va tinde sa se egaleze, astfel, odata cu
oprirea urcarii, acul indicator va reveni la zero.
Viteza se
masoara in metri pe secunda (m/s) sau in picioare pe minut
(fpm). Din punct de vedere constructiv se aseamana cu altimetrul. Partea principala a
instrumentului o constituie tot o capsula metalica, care
comunica cu un termos. Pe tubul de legatura exista un orificiu
capilar (tub capilar), prin care ansamblul capsula-termos comunica cu
exteriorul. Asupra peretilor capsulei actioneaza presiunea
statica a aerului atmosferic. In pozitie de repaus, presiunea din
interiorul capsulei va fi egala cu presiunea statica din exterior, datorita
tubului capilar. Acul indicator al aparatului se va afla in dreptul valorii
zero. Daca schimbam pozitia aparatului, mutandu-l la o
inaltime mai mare, presiunea din exteriorul capsulei va
scadea, ceea ce va determina dilatarea capsulei in urma
careia acul indicator al aparatului va indica urcarea. Prin tubul capilar,
diferenta de presiune va tinde sa se egaleze, astfel, odata cu
oprirea urcarii, acul indicator va reveni la zero.
In consecinta, variometrul se bazeaza pe principiul egalarii franate a diferentelor de presiune. Prin tubul capilar, egalarea presiunilor din interiorul si exteriorul capsulei se produce cu o viteza relativ constanta, deci cu cat planorul (avionul) va cobori sau va urca cu o viteza mai mare, diferenta de presiune va fi mai mare, deci si valoarea indicata de aparat va fi mai mare. In timpul urcarii, aparatul va indica valori pozitive, iar in timpul coborarii valori negative, in metri pe secunda (m/s). Variometrele moderne mai ales cele folosite in planorism sunt prevazute si cu un sistem sonor de avertizare a urcarii sau coborarii.
Busola
Busola sau compasul este un instrument de masura pentru determinarea punctelor cardinale, indicand Polul Nord si Polul Sud magnetic.
 Busola poate fi
clasica sau numerica. Cea clasica se compune dintr-o
capsula transparenta si etansa care contine un
lichid uleios, in care se roteste, fixata pe un pivot, o
sageata magnetizata, colorata, de obicei, in rosu
si negru, capatul rosu indicand Polul Nord, iar cel negru
(albastru) Polul Sud. Fundul capsulei poate fi liniat, cea ce permite o pozitionare
simpla pe harta, usurand astfel gasirea Nordului si
orientarea pe harta in spatiu.
Busola poate fi
clasica sau numerica. Cea clasica se compune dintr-o
capsula transparenta si etansa care contine un
lichid uleios, in care se roteste, fixata pe un pivot, o
sageata magnetizata, colorata, de obicei, in rosu
si negru, capatul rosu indicand Polul Nord, iar cel negru
(albastru) Polul Sud. Fundul capsulei poate fi liniat, cea ce permite o pozitionare
simpla pe harta, usurand astfel gasirea Nordului si
orientarea pe harta in spatiu.
Deviatia este deplasarea suferita de acul magnetic sub influenta unor campuri electromagnetice din apropierea busolei, provocate de aparate sau instrumente electrice, zacaminte de minereuri feroase. Pentru eliminarea acesteia este necesara aplicarea unei corectii de directie.
Inclinatia este unghiul format cu tangenta la suprafata globului terestru, aceasta valoare fiind in Europa centrala de ca. 66,5° ceea ce inseamna ca intensitatea campului magnetic orizontal atinge numai 40 % din valoarea sa, in comparatie cu campul magnetic vertical ce atinge 90 %.
Simulatorul cu proceduri integrate de zbor imita o carlinga tridimensionala, ce utilizeaza monitoare de tipul touch-screen cu interfete simulate de dimensiuni egale cu vederile unei aeronave.
 Afisajele
suplimentare au ca scop aplicatii de suport pentru utilizator ce
contin scheme in miscare. Totodata, simulatorului i se pot
adauga comenzi hardware pentru imbunatatirea
experientei de zbor. Unul dintre
avantajele pe care le ofera este posibilitatea configurarii in
vederea obtinerii compatibilitatii cu mai multe tipuri de
avioane, facand referire la puntea de comanda.
Afisajele
suplimentare au ca scop aplicatii de suport pentru utilizator ce
contin scheme in miscare. Totodata, simulatorului i se pot
adauga comenzi hardware pentru imbunatatirea
experientei de zbor. Unul dintre
avantajele pe care le ofera este posibilitatea configurarii in
vederea obtinerii compatibilitatii cu mai multe tipuri de
avioane, facand referire la puntea de comanda.
Ultima generatie de simulatoare au in componenta lor afisaje cu cristale lichide si touch-screen cu o scara de 1:1 pentru toate tipurile de avioane. Prezinta avantaje prin rapiditatea si simplitatea reconfigurarii platformelor pentru diversele tipuri de avioane, avand si o imagine de ansamblu estetica.
Alte imbunatatiri au fost aduse lectiilor de zbor pe care le poate implementa instructorul, interfata fiind mult mai prietenoasa. Soft-ul in componenta sa, ofera avantajul fiecarui pilot sa-si creeze propriul set de lectii de antrenament, in functie de cerintele fiecaruia.
 Acest
aspect contribuie la cresterea eficientei programului, precum si
Acest
aspect contribuie la cresterea eficientei programului, precum si
imbunatatirea experientei de zbor.
Cele mai performante simulatoare de zbor beneficiaza acum de noi caracteristici si optiuni, incluzand un sistem de miscare electric ce imita miscarile avionului in momentul trecerii printr-o furtuna, un gol de aer, decolare/aterizare; PC-uri bazate pe generatoare de imagine, proiectoare cu cristale lichide pe siliciu si sisteme de recunoastere a vorbirii in controlul traficului aerian.
Datorita standardelor sale de performanta, aceste tipuri de simulatoare ofera constant solutii pentru satisfacerea celor mai neobisnuite cerinte in antrenamentul si formarea pilotilor.
Totodata se adapteaza perfect cerintelor impuse de aeronavele comerciale cum ar fi Airbus A330/A340/A380 si Boeing 474/777/787.
Aceste simulatoare sunt proiectate sa reproduca cu o acuratete de neegalat toate detaliile vizuale, auditive, tactile si operationale si sa creeze o experienta unica de zbor in formarea pilotilor in timpul orelor de antrenament.
Simulatoarele full-flight ofera toate caracteristicile necesare pentru o experienta de zbor cat mai realista, mentionand urmatoarele:
utilizeaza componente originale in reproducerea aeronavei realizand o imbinare fara sudura
beneficiaza de un soft de mare fidelitate fiind si un furnizor de date;
indeplineste toate cerintele impuse in activitatea de formare si in cadrul operatiunilor internationale de acordare a licentelor si a documentelor;
sisteme de miscare electrice si hidraulice de inalta fidelitate;
foloseste procesoare grafice si generatoare de imagine;
proiectoare de inalta rezolutie cu cristale lichide pe siliciu;
sistem de afisare vizual cu un camp larg 200o x 43o;
set complet de instrumente integrate de care beneficiaza instructorul.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Computerul este unitatea de calcul a simulatorului si tot pe el este rulata aplicatia software. Computerul utilizat este alcatuit din urmatoarele componente:
|
Procesor |
|
|
Model Procesor: |
AMD Athlon II X2 215 |
|
Frecventa procesor (MHz): |
2.5 GHz |
|
FSB (MHz): | |
|
Dimensiune Cache procesor (KB): |
1024 L2 |
|
Placa de Baza |
|
|
Retea integrata: |
Realtek RTL8201EL 10/100 |
|
Sloturi: |
1 x PCI Express x16 |
|
Sunet integrat: |
Audio de inalta definitie integrat cu codec Realtek ALC662, compatibil audio 3D si HD |
|
Memorie |
|
|
Tip RAM: |
DDR 3 |
|
Capacitate (MB): | |
|
Frecventa memorie (MHz): | |
|
Placa video |
|
|
Model: |
ATI Radeon HD 5770 |
|
Conectori: |
2 x DVI 1 x HDMI 1 x Display Port |
|
Unitati de Stocare/Optice | |
|
Capacitate HDD (GB): | |
|
Interfata HDD: |
SATA |
|
Unitate optica |
DVD-RW Dual Layer 24x |
|
Viteza de rotatie (rpm): | |
|
Periferice | |
|
Mouse: |
Optic , scroll, PS2 |
|
Tastatura: |
Da |
|
Joystick: |
Logitech |
|
Altele | |
|
Carcasa: |
Microtower |
|
Putere sursa (W): | |
|
Dimensiuni (W x D x H mm): |
166 x 428 x 384 |
Placa video este conectata la 2 monitoare Widescreen LCD de 18.5 inch. Acestea sunt pozitionate unul sub altul, primul sfiseaza imaginea vazuta prin parbrizul avionului, iar cel de-al doilea afiseaza bordul cu principalele instrumente de navigatie.
Ca si in cazul seriei precedente ATI Radeon, HD 5700 are la baza cea mai noua arhitectura grafica dezvoltata in laboratoarele ATI, devenind astfel cea de-a treia generatie construita pe baza tehnologiei 40nm. Seria HD 5700 se bucura pe deplin de prezenta suportului DirectX 11, suport ce alaturi de Open GL 3.2 va ajuta seria HD 5700 sa fie pregatita pentru cele mai noi aparitii in materie de jocuri cat si pentru editari grafice la cel mai inalt nivel.
Nu trebuie omisa nici prezenta tehnologiilor ATI Eyefinity si ATI Stream. In timp ce Eyefinity ofera suportul necesar pentru conectarea mai multor monitoare, ATI Stream imbunatateste timpii de codare video si ofera o performanta ridicata la rularea de continut video in aplicatii cum ar fi Adobe Flash, ajutand la crearea de efecte vizuale imbunatatite pentru o calitate ridicata a imaginilor.
Din noua serie de placi video ATI, fac parte doua modele: ATI Radeon HD 5750 si ATI Radeon HD 5770. Cele doua modele difera cand vine vorba de procesor. In timp ce modelul HD 5750 foloseste un procesor grafic Juniper LE tactat la 700 MHz, procesorul grafic Juniper XT al modelului HD 5770 este putin mai rapid lucrand la 850 MHz.
ATI Radeon HD 5770
 Cu o viteza pixel fill rate de 13.6 Gigapixel/sec, ambele
modele vor multumii utilizatorii prin capacitatea memoriei de 1024MB cu un
bus de 128 biti, memoria va lucra la 4600 Mhz, in timp ce prezenta
celor 800 de procesoare stream va fi pe placul celor ce vor alege placa video
pentru editare grafica. Printre tehnologiile ce vin alaturi de seria HD
5700 mai putem enumera Pixel Shader 5.0 cat si posibilitatea de conectare
a doua placi video pe aceeasi placa de baza prin
intermediul tehnologiei CrossFireX.
Cu o viteza pixel fill rate de 13.6 Gigapixel/sec, ambele
modele vor multumii utilizatorii prin capacitatea memoriei de 1024MB cu un
bus de 128 biti, memoria va lucra la 4600 Mhz, in timp ce prezenta
celor 800 de procesoare stream va fi pe placul celor ce vor alege placa video
pentru editare grafica. Printre tehnologiile ce vin alaturi de seria HD
5700 mai putem enumera Pixel Shader 5.0 cat si posibilitatea de conectare
a doua placi video pe aceeasi placa de baza prin
intermediul tehnologiei CrossFireX.
ATI Radeon HD 5750
 Seria
Radeon HD 5700 va putea reda in rezolutie Full HD 1080p la o
rezolutie de maxim 2560 x 1600, rezolutie ce poate fi atinsa
prin conectarea a trei monitoare.
Seria
Radeon HD 5700 va putea reda in rezolutie Full HD 1080p la o
rezolutie de maxim 2560 x 1600, rezolutie ce poate fi atinsa
prin conectarea a trei monitoare.
Fie ca va fi folosita pentru jocuri, divertisment sau prelucrare grafica, noua serie ATI Radeon HD 5700 se va ridica la pretentiile utilizatorilor sai. Ca si in cazul lansarilor precedente si de data aceasta ATI va lua fata concurentei prin implementarea suportului DirectX 11.
Caracteristici tehnice
|
General |
|
|
Procesor video: |
ATI Radeon HD5770 |
|
Slot: |
PCI Express 2.0 |
|
Rezolutie maxima |
2560 x 1600 (DVI) |
|
Procesor |
|
|
Producator chipset: |
ATI Radeon |
|
Serie: |
Radeon HD 5k |
|
Versiune Pixel Shader: | |
|
Tehnologie de fabricatie (nanometri): | |
|
Frecventa procesor (MHz): | |
|
Memorie |
|
|
Capacitate memorie (MB): | |
|
Tip memorie: |
GDDR5 |
|
Frecventa memorie (MHz): | |
|
BUS memorie (biti): | |
|
Alte caracteristici |
|
|
Suport DirectX (versiune): | |
|
Suport OpenGL (versiune): | |
|
Tehnologii: |
ATI
CrossFire X |
|
Conectori |
|
|
Conector DVI: |
Da |
|
Sistem de racire |
|
|
Cooler: |
Dual Slot Fan |
|
Radiator: |
Da |
|
Altele |
|
|
Altele: |
DisplayPort |
Mansa de comanda
 Un joystick
este un periferic al computerului personal sau un dispozitiv de
comanda ce consista dintr-o maneta care pivoteaza si
transmite apoi unghiul sau in doua sau trei dimensiuni unui computer.
Aceste dispozitive sunt folosite de obicei la controlul jocurilor video si de obicei au unul
sau mai multe butoane cu stari ce pot fi de asemenea citite de catre
computer. Termenul joystick a devenit un sinonim pentru dispozitivele de
comanda pentru jocuri care pot fi conectate la un computer, pentru ca
PC-ul numeste intrarea unde se conecteaza joystick-ul, "intrare
pentru joystick". Cu acelasi design de baza, dar cu o
importanta mult mai mare, este si instrumentul principal de
control al aparatelor de zbor (elicopter si, mai nou, avion). Se
bazeaza pe acelasi principiu al joystick-ului pentru PC
imprimandu-si miscarea 3D unui computer central ce ii transforma
miscarile in diferite actiuni (virare, urcare, coborare).
Un joystick
este un periferic al computerului personal sau un dispozitiv de
comanda ce consista dintr-o maneta care pivoteaza si
transmite apoi unghiul sau in doua sau trei dimensiuni unui computer.
Aceste dispozitive sunt folosite de obicei la controlul jocurilor video si de obicei au unul
sau mai multe butoane cu stari ce pot fi de asemenea citite de catre
computer. Termenul joystick a devenit un sinonim pentru dispozitivele de
comanda pentru jocuri care pot fi conectate la un computer, pentru ca
PC-ul numeste intrarea unde se conecteaza joystick-ul, "intrare
pentru joystick". Cu acelasi design de baza, dar cu o
importanta mult mai mare, este si instrumentul principal de
control al aparatelor de zbor (elicopter si, mai nou, avion). Se
bazeaza pe acelasi principiu al joystick-ului pentru PC
imprimandu-si miscarea 3D unui computer central ce ii transforma
miscarile in diferite actiuni (virare, urcare, coborare).
Extreme3D Pro este un joystick performant, produs de compania Logitech. Acesta este dotat cu 12 butoane usor programabile pentru a se adapta stilului fiecarui pilot. Poate fi o alegere perfecta atat pentru pilotii experimentati in simulatoare cat si pentru cei incepatori.
|
Caracteristici speciale: |
Twist-handle rudder control |
|
Interfata: |
USB |
|
Altele: |
Ergonomic design |
|
Sistem de operare: |
Windows 98, Windows 2000, Windows Me, Windows XP, Windows Vista,
Windows 7 |
|
Butoane: |
12 butoane programabile |
Microsoft Flight Simulator este un simulator de zbor pentru PC pentru Microsoft Windows, promovat si deseori vazut ca un joc video.
Unul din cele mai vechi, cunoscute si cuprinzatoare serii de simulatoare de zbor pentru PC, Microsoft Flight Simulator a fost un produs timpuriu in portofoliul Microsoft - diferit de celelalte programe, majoritatea fiind orientate inspre afaceri - depasind Windows cu trei ani.
Bruce Artwick a produs primul program Flight Simulator in anul 1977, iar compania sa, subLOGIC, l-a vandut pentru diferite PC-uri. In 1982 compania lui Artwick a licentiat Microsoft-ului o versiune de Flight Simulator pentru IBM PC, care a fost promovat ca Microsoft Flight Simulator 1.00. Directorul Microsoft, Bill Gates era fascinat de opera lui Antoine de Saint-Exupéry Zborul de Noapte (Vol de Nuit-1931), care descria in detaliu senzatia zborului avioanelor mici.
Microsoft Flight Simulator si-a inceput viata ca un set de articole de grafica scrise de Bruce Artwick in 1976 despre un program de grafica 3D. Cand editorul revistei i-a spus ca abonatii vor sa cumpere programul, Bruce Artwick a infintat compania subLOGIC Corp. in 1977 si a inceput sa vanda simulatoare de zbor pentru calculatoare 8080 cum ar fi Altair 8800 si IMSAI8080. In 1979 subLOGIC a lansat FS1 Flight Simulator pentru Apple II. In 1980 subLOGIC a lansat o versiune pentru Tandty TRS-80, iar in 1982 a licentiat o versiune pentru IBM PC cu grafica CGA pentru Microsoft, care a fost lansata sub numele de Microsoft Flight Simulator 1.00. subLOGIC a continuat sa dezvolte produsul si pentru alte platforme, iar Flight Simulator II a fost lansat pentru Apple II in 1983, la Commodore 64, MSX si Atari 800 in 1984, si la Commodore Amiga si Atari ST in 1986. Intre timp, Bruce Artwick a parasit subLOGIC pentru a infinta Bruce Artwick Organisation pentru a lucra la Microsoft pentru versiunile ulterioare, incepand cu Microsoft Flight Simulator 3.00 in 1988. Microsoft Flight Simulator a ajuns la maturitate comerciala cu versiunea 3.1, unde a inceput sa foloseasca grafica 3D si accelerare grafica, devenind un produs de prima mana.
 Microsoft a produs constant noi versiuni ale
simulatorului, adaugand noi caracteristici cum ar fi noi tipuri de
aeronave si peisaj mai detaliat. Editia Profesionala (Professional
Edition) a fost lansata cu versiunile 2000 si 2002,
care includea mai multe aeronave, utilitare si peisaje mai detaliate decat
versiunea normala, formatul fiind abandonat cu versiunea 2004(versiunea
9), care revenise la formatul de single-edition si a marcat 100 de ani de zbor cu propulsie, iar Flight
Simulator X a revenit la formatul cu editie dubla cu
'Standard Edition' si 'Deluxe Edition'.
Microsoft a produs constant noi versiuni ale
simulatorului, adaugand noi caracteristici cum ar fi noi tipuri de
aeronave si peisaj mai detaliat. Editia Profesionala (Professional
Edition) a fost lansata cu versiunile 2000 si 2002,
care includea mai multe aeronave, utilitare si peisaje mai detaliate decat
versiunea normala, formatul fiind abandonat cu versiunea 2004(versiunea
9), care revenise la formatul de single-edition si a marcat 100 de ani de zbor cu propulsie, iar Flight
Simulator X a revenit la formatul cu editie dubla cu
'Standard Edition' si 'Deluxe Edition'.
Cele mai recente versiuni ale acestui simulator, MS Flight Simulator 2004 si noul MS Flight Simulator X au atras piloti veterani, viitori piloti si chiar oameni care candva au visat sa fie piloti. Fiind mai mult un mediu virtual foarte captivant decat un simplu joc, este uneori frustrant, complex si dificil din cauza nivelului mare de realism, dar poate fi si meritoriu pentru un flightsimmer priceput. Suprafata pe care se poate zbura cuprinde intreaga lume, cu diferite nivele de detaliu, incluzand 20.000 de aeroporturi. Decoruri individual-detaliate se pot gasi reprezentand marile monumente si o un numar in continua crestere de orase si metropole. Detaliile peisajelor sunt marunte si departe de centrele populate si in special in afara SUA, desi o varietate de site-uri ofera add-on-uri cu peisaje (comerciale si gratuite) si decoruri pentru a remedia aceasta problema.
Ultimele doua versiuni includ o simulare meteorologica complexa si sofisticata, cu abilitatea de a descarca de pe internet date meteo in timp real, un mediu aerian inclusiv trafic de control aerian interactiv (desi seriile MSFS nu au fost primele care sa includa asa ceva), aeronave cu care poate zbura utilizatorul de la istoricul Douglas DC-3 pana la la Boeing 777 si un mare numar de resurse incluzand lectii interactive si provocari, si checklists (liste cu sarcini pentru avioane).
Personalizari in Flight Simulator
Flight Simulator beneficiaza de o structura care permite utilizatorilor sa modifice orice aspect al continutului jocului. Tipurile de fisiere sunt de mai multe categorii, permitand editarea unor caracteristici specifice cu flexibilitate. Aeronavele jocului, de exemplu, sunt compuse din 5 parti:
Aspecte individuale care pot fi editate includ amplasarea cockpitului, imaginea sa, modelul aeronavei, texturile modelului, caracteristicile de zbor, modelele de decor (scenery) si texturile acestora, deseori cu programe usor de utilizat precum Notepad. Simmerii pasionati au profitat de avantajul oferit de Flight Simulator in privinta vastelor capabilitati add-on, legand cu succes Flight Simulator la controllere facute acasa, unele apropiindu-se de complexitatea unor simulatoare comerciale profesionale.
Un numar de site-uri sunt dedicate add-onurilor de orice fel (cum ar fi aeronave de la linii aeriene reale, masini utilitare pentru aeroport, cladiri reale localizate in orase specifice, texturi, si fisiere cu orase complete). Marea disponibilitate a add-onurilor gratuite pentru simulator de pe internet a incurajat dezvoltarea unor comunitati uriase si diverse legate intre ele prin forumuri, zbor multiplayer online si Linii aeriene virtuale. Prezenta internetului a facilitat si distributia add-onurilor comerciale (pay-ware) pentru simulator, cu optiunea de a descarca fisierele, astfel reducand costurile de distributie.
Multe personalizari sunt payware. Producatori precum Aerosoft, PMDG, Flight1, JustFlight, Captain Sim, LAGO, Project Magenta, Sim Flyers, Captain Keith, Phoenix Simulation Software (PSS) si Perfect Flight produce add-onuri de acest fel. Imbunatatiri de scenarii, aeronave, pachete de sunete, utilitare si multe alte feluri de programe sunt disponibile sub acest fel de plata. Add-onurile payware uneori tind sa detina mai multe caracteristici decat cele freeware; caracteristici extensive nu sunt, oricum, limitate la pachetele payware, si cateva pachete freeware mai selecte sunt recunoscute ca oferind aceeasi functionalitate si calitate profesionala ca si cele payware, dar fara nici un cost. Add-onurile airliner payware uneori ofera sisteme de simulare in-depth, cockpituri virtuale cu caracteristici walkaround (unde pilotul poate parasi cockpitul aeronavei si sa umble in jurul unor parti sau in intreaga cabina), si panouri de comanda 2D realistice.
Aeronave in Flight Simulator X
|
Aeronave |
Standard |
Deluxe |
Acceleration/Deluxe |
|
Airbus A321 |
Da |
Da |
Da |
|
Air Creation 582-SL Trike Ultralight |
Da |
Da |
Da |
|
AgustaWestland AW101 |
Nu |
Nu |
Da |
|
Beechcraft Baron 58 |
Da |
Da |
Da |
|
Beechcraft Baron 58 G1000 |
Nu |
Da |
Da |
|
Beechcraft King Air 350 |
Da |
Da |
Da |
|
Bell 206B JetRanger |
Da |
Da |
Da |
|
Boeing 737-800 |
Da |
Da |
Da |
|
Boeing 747-400 |
Da |
Da |
Da |
|
Boeing F/A-18 Hornet |
Nu |
Nu |
Da |
|
Bombardier CRJ-700 |
Da |
Da |
Da |
|
Bombardier Learjet LJ-45 |
Da |
Da |
Da |
|
Cessna 208-B Grand Caravan |
Da |
Da |
Da |
|
Cessna 172S SkyhawkSP |
Da |
Da |
Da |
|
Cessna 172S Skyhawk SP G1000 |
Nu |
Da |
Da |
|
De Havilland DHC-2 Beaver floatplane |
Da |
Da |
Da |
|
De Havilland Canada DHC-8 |
Inactiv |
Inactiv |
Inactiv |
|
DG-808-S Competition Sailplane |
Da |
Da |
Da |
|
Douglas DC-3 |
Da |
Da |
Da |
|
Extra EA-300-S |
Da |
Da |
Da |
|
Grumman G-21-A Goose |
Inactiv |
Da |
Da |
|
McDonnell Douglas MD-83 |
Inactiv |
Inactiv |
Inactiv |
|
Maule Orion M-7-260-C Super Rocket on skis |
Inactiv |
Da |
Da |
|
Maule Orion M-7-260-C Super Rocket |
Inactiv |
Da |
Da |
|
Mooney M-20-M Bravo |
Da |
Da |
Da |
|
Mooney M-20-M Bravo G1000 |
Nu |
Da |
Da |
|
North American P-51D Racer |
Nu |
Nu |
Da |
|
Piper PA-28 Cherokee 180 |
Inactiv |
Inactiv |
Inactiv |
|
Piper J-3C-65 Cub |
Da |
Da |
Da |
|
Robinson R-22 Beta II |
Da |
Da |
Da |
Aeronavele inactive apar doar in anumite misiuni, ele neputand fi utilizate in "free flight". Cu alte cuvinte cel care se antreneaza separat de misiunile standard, sau care isi creaza propriile antrenamente in functie de necesitatile sale nu poate utiliza aceste aeronave.
Un simulator de zbor presupune actionarea multor comenzi care trebuie sa fie cat mai simplu de realizat si la indemana pilotilor.
Simulatoarele profesionale beneficiaza de toate butoanele si manetele care sunt si in componenta unei aeronave, fiind pozitionate in functie de importanta si de frecventa utilizarii acestora. Intr-un simulator obisnuit, in special cele pe care incep amatorii nu au butoane de comanda si control al aeronavelor.
Comandarea acestora se face prin intermediul tastaturii, prin combinarea diferitelor taste, lucru care este foarte incomod si de multe ori viteza de reactie este prea mica pentru a reusi efectuarea lor. Avand in vedere ca butoanele tastaturii sunt foarte apropiate si la acelasi nivel se pot face greseli cea ce ofera un disconfort.
Cu toate acesta tastatura are si ea avantajul ei luand in calcul faptul ca fiecare computer este dotat cu asa ceva si conectarea acesteia prin USB este la indemana oricui.
Mansa de comanda reprezinta componenta cea mai importanta dintr-un simulator, fiind si cea care controleaza miscarile avionului. Utilizand un joystick simti ca pilotezi intr-adevar un avion. Controlul avionului se face mult mai usor si cu o precizie mult mai buna, decat prin intermediul tastaturii. Si mansa, ca si tastatura se conecteaza la computer prin magistrala seriala universala.
Luand in calcul si prezenta unui bord totul pare mult mai clar. Exista o viziune de ansamblu a comenzilor, a butoanelor si a celorlalte indicatoare.
Din acest moment putem spune ca suntem intr-un simulator si ca programele de pregatire se afla cat mai aproape de realitate.
Un joystick de tip USB prezinta considerente avansate din punct de vedere al preciziei si flexibilitatii daca este realizat cu un microcontroller.
Componenta Hardware
Este alcatuita din cateva elemente de baza precum rezistoare, condensatoare, dar componenta principala o constituie microcontroller-ul ATMega 8.
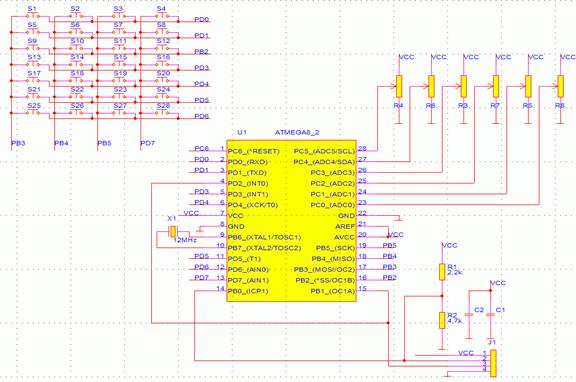
Legaturile microcontroller-ului cu senzorii si butoanele joystick-ului sunt elementare. In schema electrica de mai sus este prezentata configuratia pinilor si conexiunea cu potentiometrele, dar se pot folosi si senzori magnetici, optici sau de alt tip.
Semnalele de intrare ale convertorului analog-digital cuprind valori intre 0 si 5 volti.
Condensatoarele sunt utilizate pentru indeplinirea functiei de filtrare avand valoarea de 0,1 μF.
Componenta Software
Aceasta parte este concentrata numai in microcontroller-ul ATMega 8 si consta in implementarea protocolului USB pe microcontroller. Asamblarea programului se poate realiza cu AVR Studio 4.
Configuratia joystick-ului este formata din 24 butoane, pentru 6 axe:
2 x 10 bit ADC intrari pentru axele X si Y
1 x 8 bit ADC intrare pentru acceleratie
1 x 8 bit ADC intrare pentru carma
1 x 8 bit ADC intrare pentru axa de inclinatie
1 x 8 bit ADC intrare pentru axa cadranului
24 de butoane
Sistemele de comunicatii audio de la bordul avioanelor sunt aproape identice cu un interfon. Prin intermediul lor, pilotii pot comunica intre ei fara a folosi un radio sau o frecventa de emisie-receptie.
Schema electronica
In aceasta schema, difuzoarele de 8 ohmi sunt folosite atat ca microfon cat si ca dispozitiv de ascultare. Potentiometrul de 10K controleaza volumul iar castigul total poate fi ajustat de potentiometrul de 5K. Se foloseste un comutator dublu cu 2 pozitii astfel incat unul este folosit pentru a vorbi si celalalt pentru a asculta.
Fiabilitatea sistemului reprezinta suma fiabilitatiilor partilor componente ale sistemului:
echipament de calcul;
placa de achizitii de date;
interfata de achizitii;
cabluri si conectori;
echipament giro.
Fiabilitatea sistemului informatic depinde de fiabilitatea componentelor electronice ale fiecaruia. Teoretic, media timpului de buna functionare a componentelor electronice este foarte mare, insa fiabilitatea ansamblului depinde si de conditiile de folosire, deoarece erorile generate de fiecare componenta se aduna si maresc eroarea ansamblului.
De aceea, pentru a avea o performanta ridicata in ceea ce priveste fiabilitatea sistemului informatic se recomanda ca dispozitivele componente sa fie folosite in spatii climatizate pentru a reduce variatiile de temperatura si umiditate ce pot afecta buna functionare a echipamentelor.
Fiabilitatea echipamentului de calcul poate fi imbunatatita prin utilizarea redondantei si a componentelor de calitate controlata:
dublarea unitatii de disc (care contine piese in miscare si are fiabilitate generala mult mai redusa decat cea a echipamentului electronic).
dublarea sursei de alimentare (prin utilizarea unor surse de alimentare neintreruptibile cu acumulatori - UPS - acestea din urma servesc la protectia informatiei, deoarece se stie ca inregistrarile de pe disc sunt sensibile la intreruperi accidentale ale alimentarii. Sursele cu acumulatori permit detectarea momentului caderii sursei de alimentare principale si mentinerea alimentarii sistemului un interval de 10-50 minute).
echiparea sistemului de calcul cu componente a caror fiabilitate raportata de fabricant este cat mai buna (de exemplu procesoare si placi de baza Intel, hard-disk-uri Westem Digital sau IBM, memorii Texas Instruments, interfete externe (eventual SCSI) Motorola etc.
Fiabilitatea placii de achizitii de date este data de fabricant ca foarte buna, dar numai in conditiile respectarii parametrilor electrici de intrare. in acest sens, pentru respectarea stricta a tensiunilor de intrare, se vor prevede in montajul de interfatare filtre, decuplari si protectii de tensiune. De asemenea, tensiunea maxima injectata in placa va fi de cca. ½ din tensiunea maxima de intrare admisa, asigurandu-se in acest mod o buna protectie la eventuale supratensiuni.
Interfata de achizitii este acea parte din echipament care face adaptarea intre semnalele provenite de la modulul giro si intrarea placii de achizitii de date. Aceasta este construita cu componente discrete, a caror fiabilitate compusa genereaza fiabilitatea generala a interfetei.
O alta problema este cea a cablurilor si a mufelor de interconectare. in vederea asigurarii unei fiabilitati cat mai bune, cablurile se vor alege in functie de semnalele transmise:
la intrarea in interfata, semnalele sunt de curent alternativ, 40 Vvv, pe o impedanta de intrare de cca 1 kW. Deoarece intrarile sunt filtrate si protejate la supratensiuni, se vor alege cabluri de uz general, a caror izolatie rezista cel putin 80 - 100 V.
la intrarea in placa de achizitii de date tensiunile sunt de maxim + 5 V, pe o impedanta de intrare de cca. 100 kW (conform specificatiilor date de fabricantul placii de achizitii). tinand cont de impedanta mare de intrare a placii de achizitii de date, in vederea reducerii riscului aparitiei de perturbatii electrice, cablurile vor fi cat mai scurte (pana in 1 m), iar in cazul necesitatii asigurarii unor distante mari intre interfata si placa de achizitii de date se vor folosi cabluri coaxiale, cu tresa conectata la terminalul GND al placii de achizitii de date. Nu se ridica probleme legate de tensiunile vehiculate prin cabluri.
cablurile de alimentare sunt uzuale, tensiunile si curentii vehiculati neridicand probleme (+ 5 V / 100 mA).
conectorii utilizati sunt standard, folositi in tehnica de calcul: conectori cu ecran conectat la masa, pini auriti si prindere asigurata cu surub si piulita.
Fiabilitatea echipamentului giro este data de fabricant ca fiind foarte buna, acesta incadrandu-se in categoria echipamentelor de inalta siguranta. Totusi, pentru a fi siguri de semnalele provenite de la echipament, se va aplica un procedeu redondant: in modulul de prelucrare a datelor se va introduce un bloc cu fiabilitate sporita care va supraveghea permanent existenta semnalelor provenite de la giro, transmitand placii de achizitii de date, printr-un canal independent, date despre functionarea echipamentului. Astfel, in cazul unor defecte, ce se manifesta prin lipsa partiala sau totala a semnalelor de la giro, echipamentul de calcul va semnaliza defectul.
Pentru a obtine performante bune din punct de vedere al fiabilitatii, trebuie urmarite:
folosirea unor calculatoare cu componente cu rata de defectare mica;
respectarea normelor privitoare la mediul de lucru al dispozitivelor electronice;
folosirea unor cabluri si a unor conectoare performante;
folosirea de componente de buna calitate si cu zgomot propriu mic in cadrul interfetei de procesare a datelor analogice;
folosirea de algoritmi de masura hardware si software redondanti.
In conditii reale de utilizare, componentele din structura echipamentelor sunt supuse unui ansamblu de solicitari. Pentru componentele electrice si electronice, principalele tipuri de solicitari sunt: electrice, termice si mecanice (socuri, vibratii etc.). Prin urmare, solicitarea reala este complexa si consta in aplicarea unor energii, dintre care cel putin una este utila in regimul de functionare a echipamentului respectiv. Dar, in afara de energii, componentele sunt supuse si unor influente datorita materialelor care exista in mediul ambiant: aer, apa, substante corosive etc. Prin patrunderea acestora in masa componentelor, se pot produce modificari ale unor proprietati fizice utile; ca si in cazul energiilor, aceste solicitari se manifesta printr-un proces de uzura (deteriorare).
Cu alte cuvinte, in conditii reale, componentele echipamentelor sunt expuse unui regim de uzura atat din partea sarcinii utile cat si din partea ambiantei. Totodata si componentele exercita o inf1uenta asupra mediului ambiant, prin degajari de energie si de material (caldura, vibratii, gaze etc.). In figura 8. 1. este ilustrat modul de interactiune dintre componenta, sarcina (utila) si mediul ambiant (definit ca ansamblu de energii si materiale).

Figura 8. 1.
Din cele expuse rezulta urmatoarele concluzii:
defectarea unei componente coincide cu momentul in care aceasta urmeaza o lege complet noua de comportare (din punct de vedere functional);
defectarea este o consecinta a faptului ca energia inmagazinata (in componenta) depaseste o anumita valoare critica;
punctul la nivelul caruia se manifesta defectul poate fi apreciat ca fiind rezistenta componentei; aceasta rezistenta trebuie inteleasa in sensul unei proprietati de a se opune defectarii.
Uneori, in sistemele tehnice, defectarea unei componente antreneaza si defectarea altora; in acest caz se produce o defectare in avalansa, cauza fiind noua repartizare de energie care se face dupa o defectare.
In cazul general, pentru o componenta oarecare se demonstreaza si se verifica experimental urmatoarea relatie, numita ecuatia fundamentala de deteriorare:
ln r = ln r0 - km te-f(w)
unde:
r - reprezinta rezistenta instantanee
r0 - rezistenta initiala
km - constanta data de concentratia materialelor in mediu si de natura lor
t - parametru timp;
e - baza logaritmilor naturali
f(w) - o functie ce depinde de energiile ce intra in procesul de reactie dintre
substantele componente si ale ambiantei.
Daca factorii din mediul ambiant nu variaza (ambianta constanta),
km te-f(w) = k = constant
ecuatia anterioara se poate pune sub forma:
ln r = ln r0 - kt
de unde rezulta: r = r0e-kt
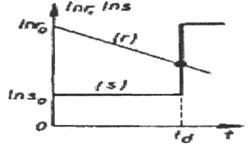
Deci, in conditii de ambianta constanta, rezistenta descreste exponential in timp. Daca, in aceleasi conditii, solicitarea aplicata (s) este egala cu rezistenta componentei, are loc defectarea. Prin urmare, daca r = s, atunci t = Td si relatia de mai sus se poate scrie:
Se observa ca pentru s = r0 rezulta Td = 0. Altfel spus, daca unui element i se aplica o solicitare egala (sau mai mare) fata de rezistenta sa initiala, defectarea se produce in momentul initial; durata de viata in acest caz este nula. In sfarsit, deoarece k > 0 (chiar si in conditii de depozitare), rezulta Td < ; pot fi realizate, daca este necesar, componente cu durata de viata foarte mare, dar nu infinita.
Prin reprezentarea grafica a ecuatiei de durata a vietii, se poate analiza procesul de defectare pentru diferite modele de variatie a rezistentei sau solicitarii. Astfel, in figura 8.2. a. este prezentat modul in care se obtine valoarea duratei de viata atunci cand se cunoaste variatia in timp a rezistentei obiectului, iar solicitarea este constanta (de factorul constant 1/k se tine seama prin scara din ordonata).
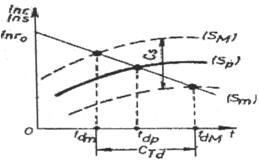
Daca deteriorarea este independenta de gradul de solicitare, variatia duratei de viata are loc conform modelului din figura 8.2.b. In sfarsit, pentru situatia in care procesul de deteriorare depinde de solicitarea aplicata, duratele de viata se determina ca in figura 8.2.c.
Rezulta ca, in general, durata de viata a unei componente nu este o proprietate stricta a sa; ea trebuie definita pentru ansamblul componenta - ambianta - sarcina utila (fig. 8.1.). Pentru cresterea duratei de viata, exista prin urmare trei posibilitati: marirea rezistentei initiale (r0), reducerea solicitarii aplicate (s) si reducerea vitezei de deteriorare.
a. b. c.
Figura 8.2.
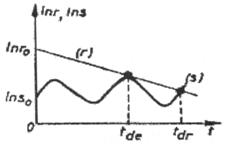
In figura urmatoare (8.3.b.) este indicat modul in care se determina durata de viata pentru solicitari cu variatie ciclica (de exemplu efectul termic asupra componentelor din echipamentele stationare in exterior, datorita variatiilor termice anuale). Momentul defectarii poate fi cel estimat (tde) este posibil insa ca in acel moment sa existe o diferenta, chiar foarte mica, intre rezistenta si solicitare, astfel ca defectarea se va produce in mod cert la momentul tdr (moment de defectare real). Eroarea absoluta care se face in estimarea duratei de viata, este, prin urmare, e = tdr - tde.
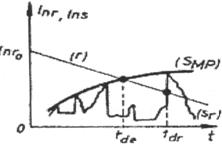
Daca solicitarea are o variatie neregulata (fig. 8.3.c.), de asemenea momentul probabil al defectarii (tde) poate sa difere de momentul real al defectarii (tdr), primul fiind determinat de solicitarea maxima probabila (smp), iar ultimul de solicitarea reala (sr).
In functie de destinatia echipamentului, solicitarea provenita din mediul ambiant creste in ordinea urmatoare: echipament stationar pe sol in interior, stationar pe sol in exterior, nava maritima, vehicul rutier, vehicul feroviar, echipament alpin, vehicul aerian, racheta/proiectil independent sau telecomandat, vehicul cosmic.
a. b.
c. d.
Figura 8. 3.
In cele analizate pana acum, s-au considerat numai situatiile in care s-au produs defectari de componente, intelegand prin aceasta ca abaterile parametrilor fundamentali au depasit limitele admisibile in sistem (din punct de vedere functional). Exista insa si foarte multe situatii in care se produc abateri ale parametrilor fundamentali, intre anumite limite, fara ca sistemul sa fie afectat (sa aiba alte raspunsuri decat cele prevazute pentru regimul de functionare corecta). In aceste situatii, se spune ca s-a produs o slabire, intelegand prin aceasta ca, datorita uzurii partiale, se modifica performantele sistemului, ramanand insa valoric intre limitele admise.
Prin urmare uzura (efect al deteriorarii) daca este brusca si suficient de intensa, coincide cu defectarea; daca este lenta, defectarea survine in momentul in care uzura atinge punctul maxim admisibil.
In tabelul urmator (tabel 8.1.) sunt enumerate criteriile de clasificare ale defectarilor, precum si cauzele sau efectele principale ale acestora.
In sensul cel mai larg, fiabilitatea unui element (componenta) reprezinta proprietatea (capacitatea) acestuia de a-si pastra parametrii de iesire intre limitele admise, intr-un anumit interval de timp si in conditii date.
Un criteriu calitativ al fiabilitatii este restabilirea (reparabilitatea), definita ca proprietatea acestuia de a-si recapata in intregime capacitatea de functionare dupa efectuarea reparatiilor.
Dupa faza in care se determina, fiabilitatea poate fi:
precalculata (in faza de concepere, proiectare)
nominala (elaborare, fabricare, montare)
de intretinere tehnica (exploatare sau servire).
Tabelul 8.1.
|
Criterii de clasificare |
Cauze si efecte principale |
|
|
Dupa cauza producerii |
Interna |
Datorita unor vicii inerente ale componentei |
|
Deteriorarii |
Externa |
Datorita solicitarilor aplicate |
|
Dupa legatura cu alte |
Dependenta |
Cauzata de alta deteriorare (in general cu defectare in avalansa) |
|
Deteriorari |
Independenta |
Datorita unor cauze intene |
|
Lenta (progresiva) |
Poate fi prevazuta printr-o examinare anterioara a caracteristicilor |
|
|
Dupa viteza de producere |
Brusca |
Nu poate fi prevazuta anterior (se produce prin efect de avalansa in microstructura si, de regula, atinge punctul de defectare) |
|
Dupa gradul de deteriorare |
Partiala |
Modificarea valorilor de parametru care nu conduce la disparitia totala a functiei cerute |
Totala |
Conduce la disparitia functiei cerute (defectare) |
Prin natura lor, elementele (componentele) si sistemele reparabile sunt caracterizate prin capacitatea de restabilire: posibilitatea acestora de a-si restabili proprietatile ca urmare a operatiei de reparare.
Pentru aprecierea eficientei tehnice a elementelor si sistemelor, se utilizeaza notiunea de disponibilitate: capacitatea unui dispozitiv de a fi in stare de functionare la un moment dat. Evaluarea acestei capacitati se face cu ajutorul coeficientului de disponibilitate:
in a carui expresie s-au utilizat notatiile:
T - intervalul de timp considerat
T1 - durata reparatiei de rang I
timpul total (cumulat) al reparatiilor efectuate in intervalul de timp T.
Pe timpul scoaterii din functiune (deconectare functionala) pentru reparatie se pot preciza, in general, urmatoarele faze de restabilire:
aparitia defectarii;
constatarea iesirii din functiune de catre personalul de serviciu;
chemarea personalului de interventie;
diagnoza tehnica (stabilirea cauzei);
demontare;
transport in laborator;
repararea propriu-zisa;
montare;
verificari finale, eventual simulari functionale;
conectare (redare in functiune).
Un caz particular de restabilire il reprezinta inlaturarea deranjamentelor la fata locului (in general, pentru defectari imprevizibile): in aceasta situatie nu mai sunt necesare fazele 5. - 6 . - 8.
Cum este si firesc, in afara de eficienta tehnica, fiabilitatea elementelor si sistemelor este corelata si cu o eficienta economica. Pentru evaluarea acesteia, trebuie sa se tina seama de urmatorul aspect: fara masuri speciale, la performante tehnice superioare corespunde o fiabilitate scazuta, iar atingerea unei fiabilitati ridicate necesita cheltuieli importante (fiabilitatea costa).
Figura
8.4.
Intr-o
prima analiza, aceasta corelatie se poate evalua cu
ajutorul raportului F/C (fiabilitate/cost). Deoarece acest raport nu este
constant in functie de nivelul fiabilitatii (fig. 8. 4.),
rezulta ca nu trebuie urmarit orice nivel de fiabilitate, ci
doar cel strict necesar.
Dintr-un studiu statistic, efectuat asupra defectarii aparaturii radioelectronice, a rezultat repartizarea din tabelul 8.2. privind cauzele si provenientele defectarilor. Concluzia ce se poate trage, daca se analizeaza si aceste date, este ferma: o buna fiabilitate nu se poate obtine decat printr-o tratare corecta a problemelor tehnice in toate fazele de activitate, de la concepere pana la utilizare.
Tabelul 8.2.
Faza tehnologica |
Cota de defectare (%) |
|
Proiectare | |
|
Uzinaj | |
Intretinere tehnica | |
|
Altele |
Fiabilitatea este o problema fundamentala a tehnicii actuale; ea reprezinta parametrul principal al calitatii, permitand aprecierea cantitativa a comportarii in timp a elementelor si sistemelor, in conditiile de influenta pe care o exercita factorii interni si externi. Prin aceasta, mai este definita ca reprezentand dinamica in timp a calitatii.
Inca de la inceputul proiectului se va folosi aceasta metoda utilizand cele doua panouri. Este foarte flexibil, rapid, economic si rezultatul este destul de impresionant. Acestia sunt pasii de urmat:
1, Proiectarea
Se foloseste programul Corel Draw pentru a realiza acest design. Alte programe precum Autocad vor avea aceeasi eficacitate sau mai bine, insa acest program este usor de folosit si adaptat pentru acest scop.
O data ce proiectul este realizat, se vor genera cateva fisiere.
Aceasta este versiunea completa, ce contine toate elementele de proiectare. Toate manetele, switch-urile si suruburile sunt desenate pentru a crea o imagine detaliata despre produsul final.
Imaginea contine toate deschiderile folosite pentru instalatia ulterioara a switch-urilor, butoanelor si suruburilor.
Acest fisier contine toate schitele necesare pentru montarea panoului pe structura de suport din lemn.
Se va printa documentul si se va fixa pe suport. Apoi se va taia de-a lungul liniei iar panoul finisat cu toate componentele se va fixa foarte bine.
Ultima dar nu cea mai putin importanta, versiunea finala de printare. Din acest fisier se va produce coperta actualului panou.
2. Taierea
Se va loca un punct de taiere a pieselor dotat de aparatura de taiere laser si se va taia fisierul produs la pasul 1. Se va folosi sticla acrilica (polimer sintetic de metacrilat metilic), fiind mai economic si usor de manevrat. Se va alege de grosime de 2 sau 3 mm, in functie de panou, se foloseste acril de tip transparent sau alb. In cazul in care monitoarele sunt montate in spatele panoului, este indicata culoarea transparenta. Pentru panourile luminoase, cel de culoare alba este mai bun deoarece ajuta la distribuirea luminii intr-un mod mult mai uniform.
O data primite panourile de acril se vor examina pentru a vedea daca dimensiunile corespund.
3. Printarea
Pe imprimanta cu laser sau cerneala. Se va alege imprimarea cu cerneala pe folie de aluminiu autoadeziva. Dupa imprimare, folia de aluminiu este acoperita cu o folie transparenta autoadeziva (de suprafata mata) pentru protectie.
Pentru panourile cu iluminare se utilizeaza hartie normala, deoarece folia de aluminiu nu este translucida.
4. Folia imprimata si panoul acrilic
Deoarece folia autoadeziva este foarte puternica, trebuie sa reusim de la prima incercare. Imprimarea contine o cruce mica de culoare alba in centrul gaurilor pentru suruburi, in panoul pe structura din lemn. Protectia pe partea autoadeziva este eliminata si folia pusa pe o suprafata plana, cu partea lipicioasa in sus. Ne asiguram ca orificiile din placa sunt bine aliniate cu orificiul creat.
Se foloseste un taietor ascutit pentru a reduce excesul de folie din jurul panoului acrilic si care acopera aceste orificii.
5. Montarea butoanelor, comutatoarelor, lampilor, etc.
Se vor efectua cu aparatul de lipit.
Afisajele
Se folosesc afisajele curbe, cu litere si simboluri pe fundal negru, imprimat cu laser pe folie translucida din plastic gri cu autoadeziv pe spate.
Bordul exterior este un pic mai gros decat este necesar. Acest lucru permite mai putin de alinierea perfecta a foliei de pe placa de sticla acrilica.
Toate suprafetele care au aparut gri pe imaginea precedenta au fost inlocuite cu negru. Negrul se presupune ca are proprietatea de a bloca trecerea luminii, cu exceptia literelor si a liniilor. La unirea celor 3 folii imprimate, se recomanda cea mai mare precizie, folosind eventual un marker.
Panoul de dupa instalare
Trebuie sa ne
asiguram ca structura decrosata in cadrul de lemn sau de sprijin
este destul de mare. Literele, liniile sau simbolurile care vor fi
iluminate din spate nu trebuie sa fie acoperite.
Piesele nevopsite ale placajului din stanga si dreapta sunt distantieri ce
vor tine led-urile panoului.
Specificatii: tensiunea de iesire 3.1 V, de culoare rosie, curent 18 mA. Datorita constructiei lor, LED-urile sunt destul de rezistente la caldura.
Pentru simplitate si consum redus de energie se folosesc, grupuri de 3 LED-uri conectate in serie, cu o tensiune de limitare a rezistorului.
LED-urile sunt montate pe o placa de circuit care are aproximativ aceeasi forma ca si panoul si se presupune ca ilumineaza pe fundal. Plasarea LED-urilor depinde de structura placii, dar spatiile dintre LED-uri ar trebui sa fie mai mult sau mai putin egale. Daca distanta dintre doua LED este prea mica, spoturile ilumineaza intens iar interesul este sa avem o iluminare uniforma, de aceea se vor distribui leduri pe toata suprafata placii.
Prin conectorul negru se
furnizeaza curent continuu de 12V.
Placa LED-urilor dupa instalare este fixata pe placaj cu ajutorul suruburilor. Acest lucru face demontarea rapida si usoara, de exemplu, in cazul in care un LED trebuie sa fie schimbat.
Cabina indicatoarelor luminoase
Pentru aproape tot ce se poate intampla la diferite sisteme ale unui avion comercial, exista indicatoare luminoase. Acestea avertizeaza pilotul daca o valva este deschisa, inchisa sau in tranzitie. Il informeaza despre conditiile importante de pilotaj cum ar fi joasa presiune in sistemul de combustibil. Atrag atentia asupra lor si-l ajuta sa localizeze problemele posibile. Acestea sunt indispensabile pentru gestionarea avionului.
Din nou, principala materie este din sticla acrilica. Toate piesele sunt lipite cu super glue.
Negru = negru acrilic
Verde = transparent acrilic
Orange = PCB pentru montarea LED-uri
Se lipesc 5 straturi cu super glue, fiind un proces destul de laborios. Deoarece peretii sunt de 1mm grosime, acestia se indoiesc uneori in timpul taierii cu laser. Pentru spatii multiple ar putea fi necesar sa se adauge un metal subtire, negru pe interior, pentru a evita imprastierea luminii de la un compartiment la altul.
Placile transparente acrilice sunt inserate in ramele negre si lipite cu super glue. O data lipite, partea care se va confrunta in sus este slefuita pentru a obtine o suprafata complet patrunsa, ceea ce ajuta la distributia uniforma a luminii.
Mansa de comanda la zbor
Un joystick de tip USB prezinta considerente avansate din punct de vedere al preciziei si flexibilitatii daca este realizat cu un microcontroller.
Cel mai simplu tip de joystick, fara butoane suplimentare se poate realiza cu urmatoarele componente
o maneta
4 push butoane in unghi drept;
o placa de test;
2-3 fire;
pini pentru transmiterea datelor.
Cele 4 push butoane se aseaza pe placa de test in unghi drept unul fata de celalalt pentru a forma un patrat ca in figura din partea stanga.
Un picior al push butonului se va conecta la un pin pentru transmiterea datelor, iar cel de-al doilea la pinul de alimentare.
Urmatorul pas il constituie montarea manetei in centrul celor 4 push butoane, lasandu-i grade de libertate pentru a atinge contactul push butoanelor.
Pentru a testa circuitul se conecteaza anodul unui LED la pinul de alimentare si catodul la pinul pentru date, apoi se alimenteaza circuitul.
Activarea push butonului va aprinde LED-ul daca toate conexiunile circuitului sunt lipite corespunzator.
Componenta de simulare a fortei inverse
Force feedback
Primul pas pentru a pune in functiune simulatorul este alimentarea tututor componentelor care necesita acest lucru si anume computerul si monitoarele in prima faza.
Se porneste un monitor, computerul si urmeaza procedura de instalare a windows-ului. Se introduce cd-ul cu sistemul de operare dorit, in cazul de fata fiind vorba de Windows 7.
Dupa instalarea windows-ului se configureaza placa video si se instaleaza soft-ul aferent acesteia.
Pasul urmator il constituie instalarea aplicatiei software. Se porneste si cel de-al doilea monitor si se configureaza extinderea desktop-ului la 2 monitoare, marindu-se rezolutia.
Se alimenteaza bordul simulatorului si se porneste aplicatia. Se fac modificari de grafica, sunet, urmand apoi selectarea unei misiuni pentru inceperea antrenamentului.
Majoritatea programelor care folosesc joystick-uri includ si un program de calibrare. Aceasta calibrare ajuta la determinarea miscarii oferita de potentiometre. In general acestea se includ in intervalele: X:(10-120) Y:(9-102). Este important de cunoscut faptul ci pozitia X creste de la stanga la dreapta si pozitia Y creste de sus in jos.
Ar fi usor sa se afirme ca miscarea joystick-ului ar putea fi transformata in sistem de coordonate liniar dupa determinarea valorii, dar nu este asa pentru ca majoritatea potentiometrelor opereaza exponential decat liniar. Valoare exponentiala inseamna ca pozitiei de mijloc nu ii corespunde media lungimii axei.
Pentru a evita astfel de probleme programatorii evita sa implementeze coordonate liniare.
(learning center)
Componente necesare realizarii unui simulator de zbor:
2 monitoare
PC
Placa video cu cel putin 2 iesiri
Tastatura
Mouse
Mansa
Pedale
Placaj
30 de butoane
Maneta de gaze
Fire
Cadru metalic
Scaun
Suruburi
Fig. 1.1 Puntea de comanda la avionul Diamond DA40
Fig. 1.2 Placa video Gigabyte ATI Radeon HD 5770
Fig. 2.1 Sistem de simulare in miscare
Fig. 2.2 Schema bloc a circuitului de dirijare in miscare
Fig. 2.3 Reflexia luminii in interiorul panoului
Fig. 2.4 Diferenta dintre un panou luminat si unul neiluminat
Fig. 2.5 Cabina avionului Boeing 737 NG
Fig. 2.6 Bordul avionului Boeing 737 NG
1. Microsoft Flight Simulator X - Lectii de zbor
2. Timnea Radu - Curs aerian
6. https://www.flightsim.com/main/howto/mind.htm
7. https://www.instructables.com/id/Mini-Joystick-with-Fire-Button/
8. https://www.fscockpit.com/
9. https://www.acesim.com/chapter1.html
10. https://www.smartcockpit.com/
12. https://www.rogerdodger.net/diyflightsims.html
13. https://gizmodo.com/312735/man-builds-30000-jumbo-jet-simulator-in-his-bedroom
14. https://www.simkits.com/buildersection.php
15. https://romanian-spotters.forumer.ro/discutii-generale-f16/simulatoare-de-zbor-t121.htm
16. https://www.hanskrohn.com/start.htm
17. https://propellerdream.blogspot.com/2009/03/din-nou-la-zbor-pe-simulator-la.html
18. https://www.scritube.com/tehnica-mecanica/Cabina-de-zbor712210924.php
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
