
UNIVERSITAREA TEHNICA DE CONSTRUCTII BUCURESTI
FACULTATEA DE GEODEZIE
Modernizarea sistemelor de pozitionare cu sateliti - GPS
STADIUL ACTUAL AL SISTEMULUI GNSS
GPS
a) Segmentul spatial
In prezent segmentul spatial GPS cuprinde un numar de 32 de sateliti (dintre care 3 neoperationali in prezent Fig. 1) dispusi pe 6 plane orbitale inclinate la 55° la o altitudine de 20230 km. Perioada de revolutie a satelitilor este de 11 ore si 56 de minute. O constelatie satelitara identica poate fi observata dupa o zi siderala cu 4 minute mai devreme.
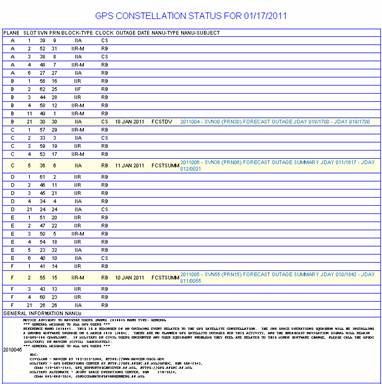
Fig. Stadiul actual al constelatiei GPS
In prezent constelatia GPS este compusa din 11 satelitii Block IIA Advanced (dotati cu posibilitatea de comunicare satelit-satelit), 12 sateliti GPS Block IIR - Replacement (inlocuiesc satelitii GPS Block II/IIA din 1997), 8 sateliti GPS Block IIR - M (Modernizat - introducerea unui nou semnal militar - cod M, pe ambele unde purtatoare si a codului C/A pe a doua unda purtatoare denumit L2C), si 1 satelit GPS Block IIF- Fallow On. Block II F ste ultima generatie de sateliti.
In 2011 se preconizeaza ca 5 sateliti GPS IIF vor fi lansati pe orbita iar lansarea recenta a unui satelit GPS Block IIF-2 este programata pe 23 iunie 2011.

Fig. Satelitul GPS Block IIF
Compania Boeing a realizat constructia celor mai multi sateliti GPS, inclusiv a primului sateliti din generatia "Block - IIF". Primul satelit GPS IIF a fost lansat pe 27 mai 2010 de la centrul spatial Cape Canaveral (cel mai vechi satelit operational a fost lansat in noiembrie 1990). Satelitul IIF a devenit complet operational in august 2010, dupa 3 luni de proba.
Caracteristicile satelitului GPS IIF sunt:
Noua generatie de satelitii se va numi "Block - III" iar primii sateliti vor fi lansati in 2014. Cu ajutorul acestor sateliti serviciile GPS vor putea fi oprite pe o anumita zona geografica in caz de razboi, serviciile GPS fiind disponibile doar Statelor Unite si aliatilor. Aceasta noua generatie de sateliti va avea o putere de transmitere a datelor de 500 de ori mai mare decat cea actuala, permitand astfel consolidarea rezistentei la bruiaj, la care se adauga o precizie de localizare de un metru. Utilizatorii civili vor utiliza doua unde purtatoare in banda L: L2 si L5.
L2 = 1227.60 MHz
L5 = 1176.45 MHz
De asemenea, se doreste ca pe viitor banda L1 sa fie utilizata si de sistemul GALILEO impreuna cu sistemul NAVSTAR (L1C).
Precizia de pozitionare pentru segmentul civil a crescut de la aproximativ 100m pana la 13 m prin suspendarea tehnicii SA (Selective Availability) in mai 2000.
b) Segmentul de control
In anul 1996 Lockheed Martin castiga un contract prin care trebuia sa inlocuiasca vechiul sistem de control operational GPS cu unul nou numit: Architecture Evolution Plan (AEP). In anul 2007 tranzitia catre noul sistem era completa iar AEP era functional si venea cu mai multe imbunatatiri: o statie back-up pentru statia de control principala, implementarea unor softuri si harduri noi pentru a genera mesaje de navigatie, implementarea unor noi sisteme de control al satelitilor, imbunatatirea software-ul antenelor de la sol, etc.
In viitor, pe o perioada de 73 de luni, firma Raytheon va construi noul segment de control operationl GPS care se va numi OCX (GPS III Operational Control Segment) ce va inlocui actualul segment de control operational. OCX va fi destinat pentru monitorizarea satelitilor din generatia Block III. OCX va dispune de noi tehnologii anti-bruiaj al semalului, algoritmi avansati pentru prognoza, o mai buna actualizare a efemeridelor, etc.
In prezent segmentul de control al sistemului NAVSTAR este format din 4 componente: statia de control principala (Schriever Air Force Base), statie de control de back-up (Vanderberg), 6 statii monitoare si 4 antene la sol.
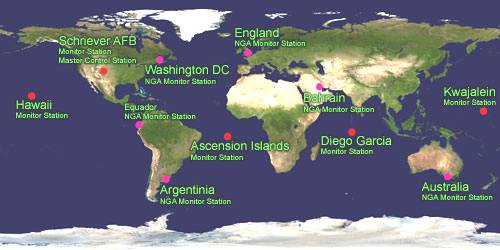
Fig. Statiile de monitorizare a satelitilor GPS

Fig. Statia de monitorizare din
c) Segmentul utilizator
Pentru a putea receptiona semnalele emise de satelitii GPS, utilizatorul trebuie sa dispuna de receptoare adecvate. Un receptor GPS este format din mai multe componente. Foarte generalizat se pot enumera urmatoarele: antena cu amplificatorul de semnal, oscilatorul de inalta frecventa, microprocesorul, unitatea de control, memoria pentru stocarea datelor si sistemul de alimentare cu energie.
Receptoarele GPS mai pot contine si harti interactive cu programe care sa ofere sugestii despre un traseu ales de utilizator sau sa sugereze directii de mers unui vehicul autonom, etc.
In prezent dispozitivele GPS au devenit atat de compacte incat pot fi integrate intr-un ceas de mana. Le putem regasi sub forma unor:
module GPS ce trebuie conectate la un calculator pentru a putea fi utilizate
receptor GPS de buzunar cu care se pot inregistra diferite informatii cum ar fi piste pentru biciclisti, trasee montane, etc care, ulterior pot fi afisate pe o harta
receptor GPS integrat in aparatele fotografice iar fotografiile obtinute vor avea asociate o locatie geografica (geotagging)
receptor GPS integrat in asa numitele telefoane inteligente
Un receptor este deseori descris in functie de numarul sau de canale: asta inseamna cati sateliti poate monitoriza in mod simultan. Daca la inceput receptoarele erau limitate la 4-5 canale in prezent receptoarele au cel putin 12 canale. Noile receptoarele GPS pot procesa pana la 66 semnale GPS (mai multe decat sunt disponibile in prezent).
Exista 3 tipuri de receptoare GPS profesionale:
handlheld receivers/navigation/mapping grade receivers (+/- 20 m acuratete, PhP 25,000 - 40,000)
survey frequency Receivers/Single frequency (+/- 2 - 3 cm acuratete, PhP 75,000 - 300,000)
geodetic receivers/dual frequency (+/- 0.1 ppm acuratete, PhP 500,000 - 1 M)
Din punct de vedere al calitatii utilizatorului, in sistemul GPS sunt definite doua categorii: utilizatorii autorizati (legaturi militare sau oficiale) si utilizatorii comuni (legaturi comerciale sau individuale). Aceasta deosebire este evidentiata de clasa de precizie in care sunt incadrate cele doua categorii de utilizatori. Din acest motiv sunt definite doua tipuri de servicii oferite prin sistemul GPS: PPS (Precise Positioning Service) si SPS (Standard Positioning Sevice).
De exemplu receptorul Leica GS15 suporta 3 sisteme GNSS: GPS, GLONASS si Galileo iar pentru sistemul GPS sunt disponibile L2 si L5.
GLONASS
a) Segmentul spatial
Satelitii sistemului GLONASS
Satelitii sistemului GLONASS, la fel ca si satelitii sistemului NAVSTAR, sunt inzestrati cu sisteme de navigatie si dirijare, sistem de orientare, sistem de propulsie, sistem de control termic si sistem de alimentare cu energie. Componenta principala este sistemul de naviagatie si dirijare, cu generatorul de semnale, sistemul de receptie si transmisie, dispozitivele de telemetrare si calculatorul de bord. Fiecare satelit este prevazut cu reflectoare optice, pentru localizare prin SLR (Satellite Laser Ranging).
In prezent segmentul spatial GPS cuprinde un numar de 26 de sateliti dintre care 21 operationali si 5 in stare de mentenanta. Dintre cei 26 de sateliti cel mai vechi satelit a fost lansat pe orbita in decembrie 2004 iar ultima lansare a avut loc pe 2 decembrie 2010 cand au fost lansati trei sateliti de pe cosmodromul Baikonur din Kazahstan. Insa acesti sateliti de tip GLONASS-M, lansati cu ajutorul rachetei purtatoare Proton-M, s-au prabusit in Oceanul Pacific la 1.500 de km de Honolulu, in Insulele Hawaii, dupa ce racheta purtatoare a deviat cu opt grade de la cursul programat.
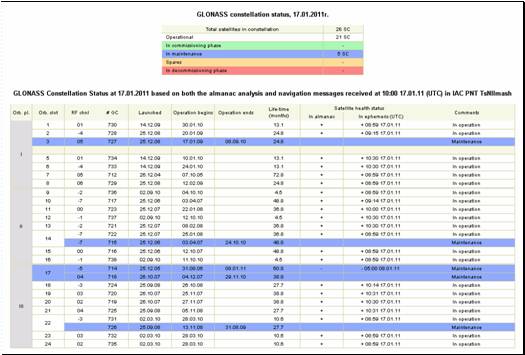
Fig. Stadiul actual al constelatiei de sateliti GLONASS

Fig. Racheta purtatoare Proton-M care a esuat lansarea celor 3 sateliti GLONASS
Satelitii sitemului GLONASS sunt dispusi pe trei plane orbitale, cate 8 in fiecare plan orbital. Satelitii sunt distantati la 45° pe orbita, iar in functie de argumentul latitudinii satelitii sunt decalati pe cele trei orbite cu 15°. Orbitele sunt aproape circulare, cu o inclinatie de 64.8°, perioada de revolutie a unui satelit fiind de 11h 15'' 44s. Inaltimea la care evolueaza satelitii deasupra Pamantului este de 19100 km. Sistemul GLONASS a ajuns la maturitatea preconizata de 24 sateliti in anul 1996. La bordul fiecarui satelit se realizeaza permanent un control asupra modului de functionare a sistemelor principale (autodiagnosa). Orice defectiune depistata este transferata mesajului de navigatie, care se actualizeaza la fiecare 30 de secunde.
Sistemul GLONASS ofera o precizie intre 13 si 100 m orizontal si intre 22 si 156 m vertical.
Exista 3 generatii de sateliti GLONASS. Cele 3 generatii de sateliti sunt denumite: Uragan (Glonass), Uragan - M si Uragan - K.
Satelitii din prima generatie Uragan aveau o greutate de 1.250 kg si erau echipati cu sisteme de propulsie simple care permiteau relocalizarea in cadrul constelatiei de sateliti. Cei mai multi satelitii din aceasta generatie au fost de tip Block IIv si au fost folositi intre anii 1988 - 2005, durata lor de functionare fiind estimala la cca. 3 ani.
Satelitii din a doua generatie Uragan M au fost construiti incepand cu anul 1990 si lansati in anul 2001. Cantaresc 1.480 kg, au o durata de functionare de 7 ani iar la bordul lor se afla ceasuri atomice cu Cesiu.
Sateitii din a treia generatie Uragan K vor avea 750 kg si o durata de functionare de 10-12 ani
Semnalele emise de satelitii sistemului GLONASS
Fiecare satelit GLONASS emite semnale in doua benzi de frecventa L1 si L2. Este vorba de fapt de 25 de canale separate de 0.5625 MHz in asa numitele benzi de frecventa L1: 1602.5625 - 1615.5 MHz si L2: 1240 - 1260 MHz.
In sistemul de navigatie GLONASS fiecare satelit este caracterizat prin frecventa lui proprie {Frequency Division Multiple Access). Repartizarea frecventelor la sateliti este data in almanahul sistemului. Doi sateliti din acelasi plan orbital decalati la 180° emit pe aceeasi frecventa. In viitor este preconizat o reducere a frecventelor de emisie.
In cadrul "serviciul de pozitionare de precizie standard" sau "serviciul de precizie scazuta" este disponibil doar semnalul de precizie standard (C/A- code).
In cadrul serviciului de pozitionare precisa este disponibil semnalul de precizie ridicata (P-code). Acesta este un semnal militar, semnal care, desi nu este criptat, nu a fost facut public.
b) Segmentul de control
Principalele sarcini ale sistemului de control
sunt:
- Urmarirea satelitilor pentru determinarea orbitelor
- Trimiterea mesajelor de navigatie catre sateliti
- Sincronizarea satelitilor din punct de vedere al
timpului
- Controlul diferentei dintre sistemul de timp al GLONASS
si UTC.
Centru de control este un complex militar aflat sub conducerea Fortelor Spatiale Ruse situat in Centrul Spatial Krasnoznamensk, la circa 70km SV de Moscova. Toate operatiile si functiile sistemului GLONASS sunt programate si coordonate de la acest centru de control. Statiile de telemetrie si monitorizare sunt localizate la Saint Petersburg, Ternopol, Eniseisk, Komsomolsk-na-Amure.
Segmentul de control al sistemului GLONASS are aceleasi functionalitati ca cel de la sistemul NAVSTAR, cu mentiunea ca toate statiile de control sunt plasate pe teritoriul C.S.I. Ca sistem de referinta, sistemul GLONASS foloseste sistemul PZ90, care este forma perfectionata a sistemului SGS85. Prin aceasta, coordonatele unei masuratori cu sistemul GPS vor diferi fata de coordonatele unei masuratoari cu sistemul GLONASS.
Sistemul de timp utilizat de
GLONASS este UTC (SU). Diferenta dintre UTC (SU) si UTC (
Sistemul NAVSTAR are sistemul lui propriu de timp fara secunde de salt. In consecinta, diferenta dintre timpul GPS si UTC este un multiplu de secunde intregi, care este transmis in mesajul de navigatie
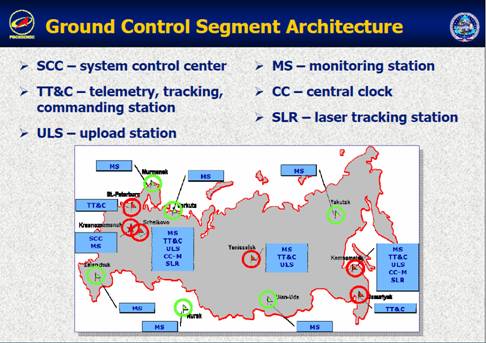
Fig. Segmentul de control al sistemului GLONASS
c) Segmentul utilizator
Receptoarele OEMV-1G, OEMV-2 and OEMV-3 produse de compania NovAtel receptioneaza semnale GPS si GLONASS. Masuratorile GPS si GLONASS permit procesarea datelor in timp real si in post-procesare.
De asemenea, firma Topcon produce receptorul GPS+ care foloseste si satelitii GLONASS.
GALILEO
Uniunea Europeana (UE) si Agentia Spatiala Europeana (European Space Agency) vor dezvolta sistemul european GNSS, denumit Galileo. Incepand cu anul 2008, functioneaza un sistem European intermediary - EGNOS - care acopera in prezent majoritatea suprafetei Europei, Asiei de Vest si Africii de Nord.
Sistemul GALILEO va fi format din 30 de sateliti pozitionati cate 10 in fiecare plan orbital inclinat la 56 de grade. Satelitii vor fi plasati pe orbite medii, la 23 222 Km altitudine. Fiecare satelit va avea o viata medie mai mare de 12 ani, panouri solare de 18.7 m si o masa de 675 Kg.
Datorita conceptiei, in orice
punct de pe glob vor fi vizibili 6 - 8 satelitii, permitand o buna orientare si
pozitionare. Aceasta vizibilitate crescuta, impreuna cu precizia deosebita a
ceasurilor de la bordul satelitilor, vor asigura eroarea deosebit de mica.
In plus, sistemul este interconectabil cu GPS si GLONASS pentru o precizie cat
mai buna pentru utilizatori. Sistemul de referinta si coordonate
utilizat va fi de tip ETRS (European Terrestrial Reference System).
Sistemul GALILEO va fi practic realizat in 2 faze:
Prima faza va fi cea de validare pe orbita (in-orbit validation phase - IOV). In aceasta faza se va testa si valida sistemul, vor fi lansati sateliti experimentali, se va crea o constelatii de 4 sateliti precum si infrastructura terestra necesara pentru monitorizarea constelatiei.
Doi sateliti experimentali Giove-A si Giove-B au fost lansati in decembrie 2005, respectiv aprilie 2008. Scopul pentru care ecesti sateliti au fost lansati este ca sa se testeze conditiile spatiale specifice in zona de lucru, ceasurile atomice si nivelul de radiatii in principal. Deoarece orbita este destul de inalta, radiatiile sunt mai puternice in aceasta zona.
Lansarea pe orbita a primilor 2 sateliti operationali este programata pentru vara anului 2011, urmand a fi lansati inca 2 sateliti catre sfarsitul anului 2011.
Cea de-a doua faza este faza operationala care consta in dezvoltarea infrastructurii la sol. Include o faza operationala intermediara in care constelatia GALILEO va avea 18 sateliti operationali. In final constelatia va avea 30 de sateliti, statii minitoare localizate in Europa, statii de control si antene la sol pe tot globul.


Fig. Satelitul Giove B
Din punct de vedere software, Galileo va oferi 4 servicii de navigatie:
. Serviciul Deschis (OS), disponibil pentru toata lumea, va functiona in 2 benzi 1164 - 1214 MHz si 1563 - 1591 Mhz, care va oferi o precizie mai mica de 4 metri in pozitionarea planimetrica si 8 in pozitionarea altimetrica.
. Serviciul Comercial (CS), criptat, care va fi oferit contra cost si va oferi o precizie mai mica de 1 metru, si chiar mai mica de 10 cm daca se folosesc si statii terestre. Ofera inca doua semnale fata de serviciul deschis, criptate, plus o capacitate limitata de transmiter de informatii (aproximativ 500 b/s), care adauga valoare acestui serviciu.
. Serviciul Public Regulat si Siguranta Vietii (PRS si SoL), criptate, vor oferi o precizie echivalenta cu cea a Serviciului Deschis, dar cu o protectie sporita impotriva bruiajului si cu putere de acoperire mare. Este destinat utilizatorilor civili (salvare, politie, forte de securitate, autoritati). Aceste semnale sunt transmise pe frecvente separate fata de serviciile OS si CS, pentru a permite blocarea acestora in caz de urgenta (atacuri teroriste, operatiuni militare).
. Serviciul de Salvare si Cautare (SAR), este contributia Europei la sistemul international COSPAS-SARSAT. Galileo va imbunatatii acest sistem, oferind in plus:
receptie si retransmitere de informatii in timp real (in acest moment timpul mediu de raspuns este de aproximativ o ora)
localizare foarte precisa a apelului de urgenta
suprafata de acoperire mult mai mare
Industriile europene implicate au dezvoltat tehnologii si metode inovative pentru ceasurile de la bordul satelitilor Galileo, printre care:
Ceasul atomic cu rubidium
Ceasul "Passive Hydrogen Maser"
Ceasurile satelitilor sunt esentiale pentru performantele de pozitionare ale sistemului. Aceste ceasuri au o precizie de cateva sute de milionimi de secunda pe zi, fiind printre cele mai precise din lume.
In prezent exista receptoare care pot capta semnale de la satelitii Galileo, desi acest sistem nu este functional. De exemplu, receptorul GR-3 produs de firma Topcon reprezinta generatia urmatoare de receptoare GPS+. Pentru cearea acestui instrument, Topcon a folosit o tehnologie capabila sa primeasca semnale de la satelitii existenti si cei care vor fi lansati: GPS - GLONASS - GALILEO.

Fig. Receptorul Topcon GR3
COMPASS/BEIDOU
BEIDOU este un proiect
dezvoltat de
Primul sistem BEIDOU-1 este un sistem experimental ce a fost dezvoltat intre anii 2000-2003 si este compus din trei sateliti operationali si unul de rezerva. Acesti sateliti cantaresc 1000 kg fiecare si au o orbita geostationara. Astfel, sistemul nu necesita o constalatie foarte mare de sateliti insa aria de acoperire este limitata. Zona in care satelitii sistemului BEIDOU 1 sunt vizibili este cuprinsa intre 70 - 140 grade longitudine estica si intre 5 - 55 grade latitudine nordica.
Cel de-al doilea sistem BEIDOU-2 este inca in derulare. Acest sistem urmeaza sa aiba o constelatie de 35 de sateliti dintre care: 5 sateliti geostationari ce vor fi compatibili cu satelitii sistemului BEIDOU-1, 30 de sateliti cu orbita medie si 3 sateliti cu orbita inclinata in plan ecuatorial. In anul 2012 acest sistem va putea fi folosit de catre utilizatorii din zona Asia si Pacific iar pana-n 2020 acest sistem va fi finalizat si disponibil la nivel global.
Semnalele transmise vor fi in 4 benzi de frecventa: 1195.14-1219.14Mhz, 1256.52-1280.52Mhz, 1559.05-1563.15Mhz si 1587.69-1591.79Mhz unele din ele suprapuse peste semnalele GPS si Galileo.
In prezent constelatia BEIDOU are 10 sateliti: 4 satelili BEIDOU 1 si 6 sateliti BEIDOU 2 (dintre care un satelit cu orbita ecuatoriala inclinata, primul cu orbita inalta in plan ecuatorial inclinat lansat vreodata).
Ultima lansare a unui satelit Beidou a fost pe 17 decembrie 2010 cand a fost lansat un satelit de tip IGSO (cu orbita ecuatoriala inclinata). In anul 2010 China a lansat in total 5 sateliti iar pana-n 2012 se preconizeaza ca sistemul Beidou va avea 14 sateliti in total.

Fig. Racheta purtatoare a celui de-al 7-lea satelit Beidou
Satelitii Beidou2 sunt bazati pe platforma DFH 3 (Dong Fang Hong), au dimensiunile 2.2 x 1.72 x 2.0 m, cu o anvergura a panourilor solare de 18.1 m si cantaresc 2200 kg din care 1100 kg combustibil. Durata de viata estimata initial la 5 ani pentru satelitii comerciali, a fost acum extinsa la 8 ani pentru variantele militare.
Ca si restul sistemelor de navigatie prin satelit, sistemul Beidou va avea doua componente: una civila cu o acuratete de pozitionare de 10 m, de viteza de 0.2 m/s si de timp de 50 ns si una pentru aplicatii militare mult mai precisa.
Timpul de referinta Compass numit BDT ( timpul Sistemului Beidou ) este bazat pe timpul atomic. Asemanator cu timpul GPS, timpul Compass este un timp continuu, care nu introduce nici un pas de timp ( leap seconds ). BDT deriva din ceasul atomic care se afla in centrul de comanda Compass. Pentru a mentine BDT in apropierea valorii timpului universal (UTC) sau de timpul atomic international (TAI) serviciul central national al timpului (NTSC) va folosi o scara de timp intermediara.
5. Sa se prezinte exemple de fisiere si tipurile de date furnizate de sistemul GNSS in cazul pozitionarii statice (post-procesare). Se va exemplifica seminificatia tipurilor de date din fisiere.
a) Fisiere de observatii
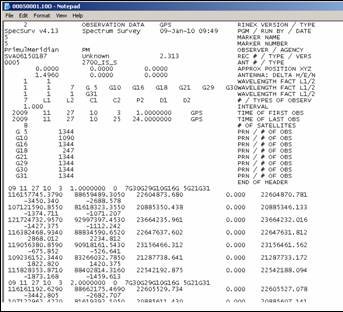
Fig. Fisier de observatii in format RINEX de la sateliti GPS
Continutul Headerului :
randul 1. Versiunea formatului, tipul fisierului "O" pentru fisierul cu observatii, sistemul satelitar GPS
randul 2. Denumirea programului care a creat fisierul curent, data cand a fost creat fisierul
randul 3. Denumirea statiei
randul 4. Numarul statiei
randul 5. Numele operatorului si denumirea firmei
randul 6. Seria (numarul) receptorului, tipul, versiunea
randul 7. Seria (numarul) antenei si tipul
randul 8. Excentricitatea antenei (H,E,N)
randul 9. Lungimile de unda pentru L1 si L2 (1=lungime de unda intreaga)
randul 10. Lungimile de unda pentru L1 si L2 (1=lungime de unda intreaga)
randul 11. Lungimile de unda pentru L1 si L2 (1=lungime de unda intreaga)
randul 12. Tipul observatiei (L=faza undei purtatoare; C,P=masuratori cu codurile C/A sau P; D=Doppler)
randul 13. Intervalul de inregistrare in secunde
randul 14. Momentul primei inregistrari (anul cu patru caractere, luna, ziua, ora, minutul, secunde, sistemul satelitar)
randul 15. Momentul ultimei inregistrari (anul cu patru caractere, luna, ziua, ora, minutul, secunde, sistemul satelitar)
randul 16. Numarul satelitului, numarul de observatii pentru fiecare satelit
Continutul sectiunii de date:
randul 1. Momentul de observatie (epoca)(anul cu doua caractere, luna, ziua, ora, minutul, secunda), numarul satelitilor conectati si codul satelitilor
randul 2. Observatii (faza exprimata in ciclii, masuratoarea cu codul exprimata in metrii, Doppler exprimat in Hz), indicator pentru pierderea fazei, puterea semnalului
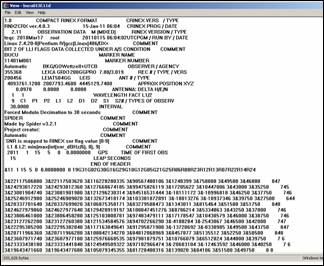
Fig. Fisier de observatii in format RINEX de la sateliti GLONASS
In figura 12 avem tot un fisier de observatii in format RINEX cu deosebirea ca la sistemul satelitare este precizat MIXED .
b) Fisiere de navigatie
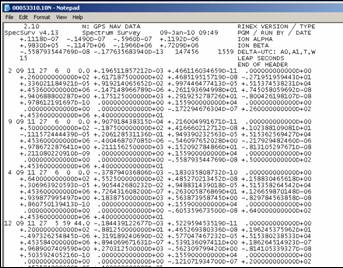
Fig. Fisier de navigatie in format RINEX de la sateliti GPS
Continutul Headerului :
randul 1. Versiunea formatului, tipul fisierului "N" pentru datele de navigatie
randul 2. Denumirea programului care a creat fisierul curent, data cand a fost creat fisierul
randul 3. Parametrii ionosferei A0 si A3 din almanah
randul 4. Parametrii ionosferei B0 si B3 din almanah
randul 5. Parametrii din almanah pentru a calcula timpul UTC
randul 6. Pasul de timp
Continutul sectiunii de date:
randul 1. Numarul PRN al satelitului, momentul de inregistrare, eroarea sistematica a ceasului, driftul, rata driftului
randul 2. Vechimea efemeridelor, termenul sinusoidal pentru corectia -r, diferenta miscarii medii, anomalia medie
randul 3. Termenul cosinusoidal pentru corectia -u, excentricitatea, termenul sinusoidal pentru corectia -u, radical din semiaxa are
randul 4. Timpul efemeridelor, termenul sinusoidal pentru corectia -I, longitudinea nodului ascendant, termenul sinusoidal pentru corectia -i
randul 5. Inclinarea orbitei, termenul cosinusoidal pentru corectia -r, argumentul perigeului, rata longitudinii nodului
randul 6. Rata inclinatiei, codul pentru canalul L2, saptamana GPS, marca pentru inregistrarea codului P pe L2
randul 7. Precizia satelitului si starea lui de functionare, eroarea de ceas, vechimea datelor despre mersul ceasului
randul 8. Momentul de transmitere a mesajului
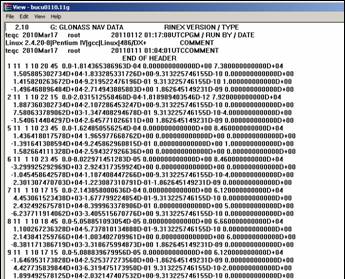
Fig. Fisier de navigatie in format RINEX de la sateliti GLONASS
In figura 14 avem tot un fisier de navigatie in format RINEX cu deosebirea ca mesajul de navigatie provine de la sateliti GLONASS .
Continutul Headerului :
randul 1. Versiunea formatului, sistemul satelitar GLONASS
randul 2. Denumirea programului care a creat fisierul curent, data cand a fost creat fisierul
randul 3. Comentarii
Continutul sectiunii de date:
randul 9. Numarul satelitului, epoca efemeridelor, eroarea sistematica a ceasului, frecventa erorii sistematice, intervalul de timp
randul 10. Pozitia, accelerarea si viteza satelitului, starea de functionare
c) Fisiere cu efemeride precise
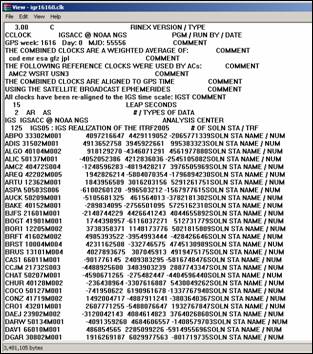
Fig. Fisier cu efemeride precise pentru satelitii GPS
Continutul Headerului :
randul 1. Versiunea formatului Rinex
randul 2. Denumirea programului care a creat fisierul curent, data cand a fost creat fisierul
randul 3. Comentarii
Continutul sectiunii de date:
randul 15. Numele si numarul statiei
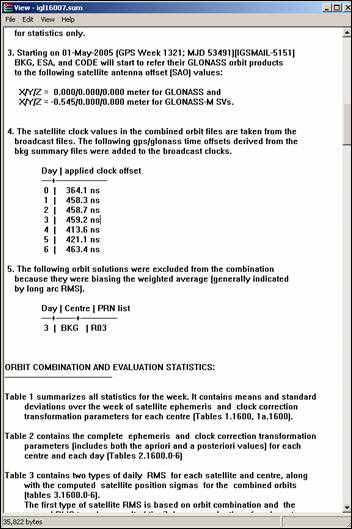
Fig. Fisier cu efemeride precise pentru satelitii GLONASS
pentru un interval de o saptamana
6. Sa se prezinte exemple de fisiere si tipurile de date furnizate de sistemul GNSS in cazul pozitionarii statice si cinematice (post-procesare). Se va exemplifica seminificatia tipurilor de date din fisiere.
Site-ul www.igs.bkg.bund.de furnizeaza informatii in formatul Rinex pentru cele 5 statii permanente EUREF din Romania. Datele sunt disponibile pe intervale orare si zilnice.

Fig. Statiile permanente EUREF din Romania
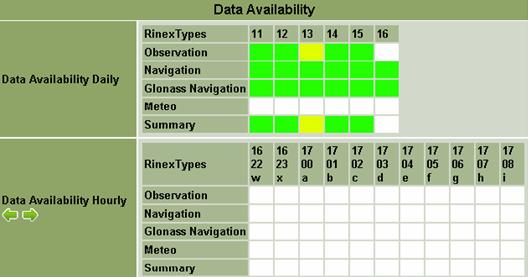
Fig. Tipurile de date disponibile
Conectarea la un serviciu de corectii diferentiale s-a realizat cu programul GNSS Internet Radio. Acest program este o aplicatie Ntrip si se foloseste pentru transmiterea corectiilor prin semnal radio sau pentru inregistrarea lor pentru post procesare.
Primul pas este setarea modului Broadcaster. Ca si host se va completa IP 195.138.192.250 si portul 2101 (Fig. 19). Userul si parola sunt: student. Apoi se alege ca datele sa fie salvate intr-un fisier.

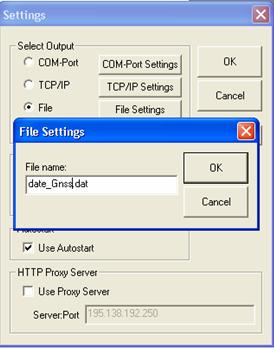
Fig. Interfata GNSS Internet Radio Fig. Setarile datelor de iesire
Dupa ce se alege statia BUCU programul se poate conecta la server.
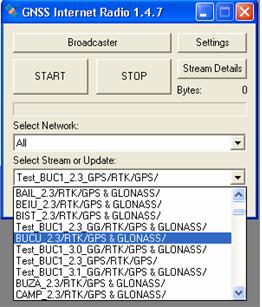
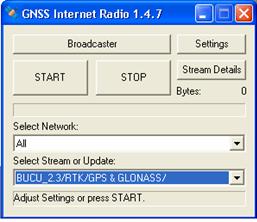
Fig. Lista statii permanente
Prelucrarea datelor in programul Trimble Geomatics Office
Pentru prelucrarea datelor in programul Trimble Geomatics Office se creaza un proiect nou de lucru si se importa datele in formatul Rinex. Se aleg 10 puncte, statia permanenta Targu Jiu si borna (Fig. 23).
Inainte de a afisa datele trebuie specificat tipul antenei, inaltimea antenei si centrul geometric al antenei (Fig. 24).
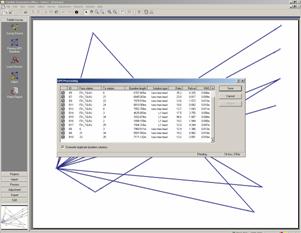
Fig. Fig.
Apoi din meniul Survey se seteaza parametrii pentru GPS Processing Styles (Fig. 25).
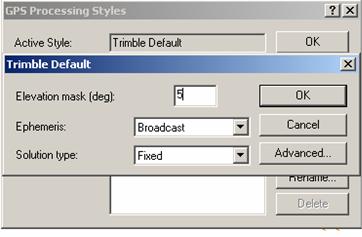
Fig.
Din meniul Survey se alege comanda Process GPS Baseline. In aceasta etapa putem analiza rapoartele tuturor vectorilor pe care ii avem in retea (Fig. 26).
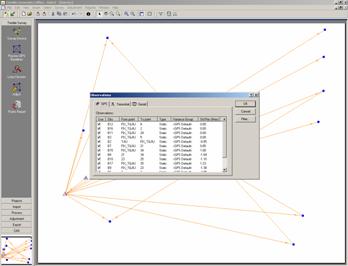
Fig.
Se fixeaza cele doua puncte de coordinate cunoscute: statia permanenta Targu Jiu si borna. Se trec coordonatele ETRS pentru fiecare (Fig. 27 si 28).
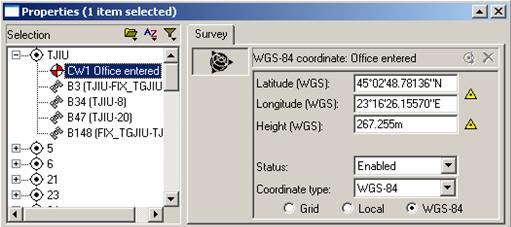
Fig.
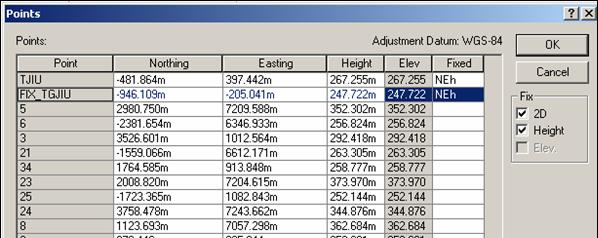
Fig.
Reteaua se compenseaza folosind din meniul Adjustment comanda Adjust.
Apoi din meniul Reports se alege comanda Network Adjustment Report pentru a afisa raportul retelei compensate (Fig. 29, 30, 31 si 32)
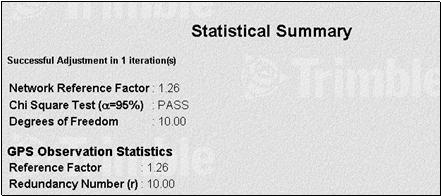
Fig.


Fig. Fig.
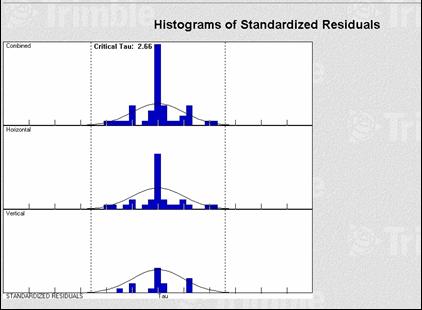
Fig.
Pentru datele in format .dat se creaza un nou proiect si se importa datele de tip GPS.dat. Se selecteaza 5 puncte masurate in aceeasi zi (2060) dintre care unul este statia permanenta Deva (Fig. 33).
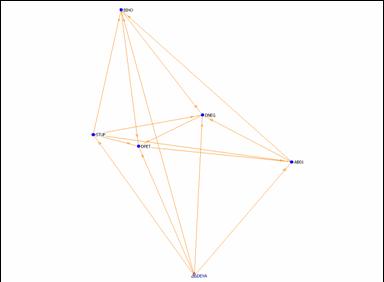
Fig.
Ceilalti pasi sunt identici cu pasii de la proiectul anterior. Rezultatele sunt afisate
in figurile 34 si 35.
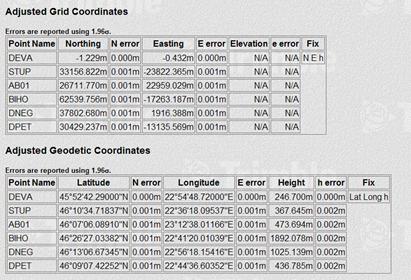
Fig.
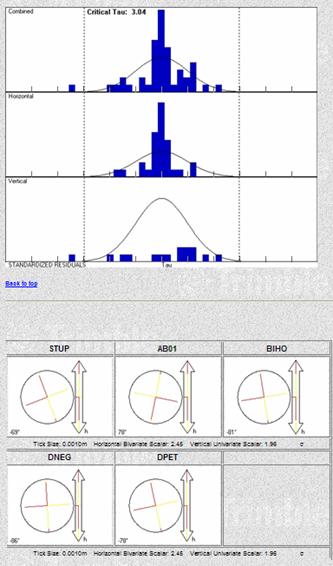
Fig.
Datele sunt exportate in fisier .txt pentru a putea face transformarea din coordinate ETRS in coordonate Stereo '70.
Transformarea se realizeaza cu programul TransDatRo pus la dispozitia utillizatorilor gratui pe site-ul ANCPI.
Pentru a realiza transformarea fisierul .txt trebuie sa respecte cateva aspecte descries in Help-ul programului.
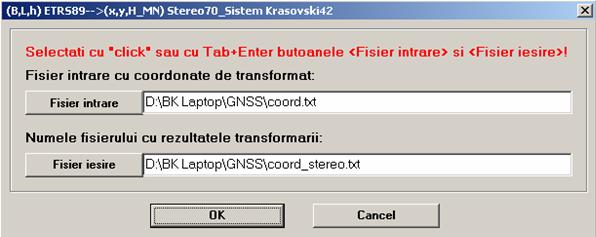
Fig.
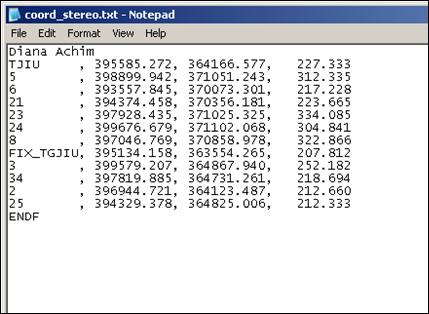
Fig.
Specificatii tehnice Sistem GNSS/GPS Leica GS15:
|
Receptorul GNSS Leica GS10 / GS15 |
Leica GS10 / GS15 Simpla Frecventa |
Leica GS10 / GS15 De Baza |
Leica GS10 / GS15 Limitat |
Leica GS10 / GS15 De Performanta |
Leica GS10 / GS15 Profesional |
|
Supported GNSS Systems |
|||||
|
GPS L2 |
|
|
|
|
|
|
GPS L5 |
|
|
|
|
|
|
GLONASS |
|
|
|
|
|
|
Galileo |
|
|
|
|
|
|
Performante RTK |
|||||
|
DGPS / RTCM |
|
|
|
|
|
|
RTK pana la 5 km |
|
|
|
|
|
|
RTK nelimitat |
|
|
|
|
|
|
Retea RTK |
|
|
|
|
|
|
Leica Lite RTK |
|
|
|
|
|
|
Actualizarea pozitiei si inregistrarea de date |
|||||
|
Pozitionare 5 Hz |
|
|
|
|
|
|
Pozitionare 20 Hz |
|
|
|
|
|
|
Logare date brute(Row data logging) |
|
|
|
|
|
|
Logare RINEX |
|
|
|
|
|
|
Iesire NMEA |
|
|
|
|
|
|
Specificatii suplimentare |
|||||
|
Functionalitate Statie de Referinta RTK |
|
|
|
|
|
|
|
Optional |
|
|
Standard |
|
Performanta GNSS |
Nr. de canale / Max. de sateliti urmariti simultan |
120 canale / pana la 60 Sateliti simultani pe doua frecvente |
|
Semnale de urmarire a satelitilor |
GPS: L1, L2, L2C, L5 / GLONASS: L1, L2 / Galileo (Test): GIOVE-A, GIOVE-B, Galileo: E1, E5a, E5b, Alt-BOC / Compass / SBAS: WAAS, EGNOS, GAGAN, MSAS |
|
|
Performante de masurare si Precizie |
Precizie (rms) in Timp-Real (RTK) |
|
|
Standard de conformitate |
In conformitate cu ISO17123-8 |
|
|
Rapid static (faza) / Static dupa initializare |
Orizontal: 5 mm + 0.5 ppm (rms) / Vertical: 10 mm + 0.5 ppm (rms) |
|
|
Kinematic (faza) / In miscare dupa initializare |
Orizontal: 10 mm + 1 ppm (rms) / Vertical: 20 mm + 1 ppm (rms) |
|
|
Initializare din zbor (On the Fly - OTF) |
||
|
Tehnologie RTK / Fiabilitatea initializarii OTF |
Leica SmartCheck+ technology / Mai mult de 99,99% |
|
|
Timp pentru initializare / Raza OTF |
Tipic 8 sec/ pana la 50 km |
|
|
Retea RTK |
||
|
Tehnologie de retea |
Tehnologie Leica SmartRTK |
|
|
Solutii de retea RTK suportate / standarde |
VRS, FKP, iMAX / MAC (Master Auxiliary Concept) aprobat prin RTCM SC 104 |
|
|
Hardware |
Specificatii de Mediu |
|
|
Temperatura de operare |
-40° C la +65° C, in conformitate cu ISO9022-10-08, ISO9022-11-special, MIL STD 810F - 502.4-II, MIL STD 810F - 501.4-II |
|
|
Umiditate |
100%, in conformitate cu ISO9022-13-06, ISO9022-12-04 si MIL STD 810F - 507.4-I |
|
|
Rezistenta la: apa, nisip si praf |
IP67 in conformitate cu IEC60529 and MIL STD 810F - 506.4-I, MIL STD 810F - 510.4-I si MIL STD 810F - 512.4-I |
|
|
Cazaturi |
Suporta cazaturi de la 1.0 m pe suprafete dure |
|
|
Rasturnare (GS15) |
Suporta cazaturi de la 2 m de pe baston pe suprafete dure |
|
|
Putere si Electric |
||
|
Consum de energie |
Tipic: 3.2 W, 270 mA |
|
|
Alimentare interna cu energie electrica |
Baterii reincarcabile si detasabile LI-Ion, 4.4 Ah / 7.4 V, 2 baterii ce se monteaza in receptor |
|
|
Alimentare interna cu energie electrica/ Timp de operare pt. GS10 / GS15 folosind 2 baterii interne |
15.00 h / 10.00 h primirea datelor RTK cu radio standard |
|
|
Comunicatii |
Legaturi de date (GS15) |
|
|
Modemuri Radio |
Complet integrat, primite complet sigilate / Transmite radio / Dispozitiv ce poate fi schimbat de utilizator |
|
|
3G GSM / UMTS (HSDPA) / modem GSM CDMA |
Complet integrat, modem GSM complet sigilat / Dispozitiv ce poate fi schimbat de utilizator / Cartela SIM ce poate fi schimbata de utilizator |
|
|
Legaturi de date externe |
||
|
Modemuri Radio |
Suport pentru orice radio UHF / VHF compatibil cu interfata RS232 ce opereza in mod transparent |
|
|
GSM / UMTS(HSDPA) / modemuri GSM CDMA |
Suport pentru orice modem compatibil GSM / GPRS / UMTS(HSDPA) / CDMA |
|
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |