
Comanda motoarelor pas cu pas (MPP). Aplicatii la realizarea unui echipament de prelucrari 2D cu fascicul laser
Generalitati.
motoarele pas cu pas (MPP) sunt convertoare electromecanice discrete, capabile sa realizeze deplasari incrementale unghiulare sau liniare (cu un anumit cuplu sau forta) in concordanta cu semnalele de comanda discrete aplicate pe infasurarile de alimentare. Aceste motoare se folosesc pe scara larga la actionarea masinilor unelte cu comanda numerica si a robotilor (servomotoare MPP de puteri mari si medii) precum si in diferite periferice ale sistemelor de calcul: imprimante, plottere, scanere, unitati de discuri magnetice si optice etc. (MPP de puteri mici).
Se intalnesc 2 variante constructive de MPP:
cu reluctanta variabila (reactive);
cu magneti permanenti (active).
1 Constructia si functionarea motoarelor pas cu pas
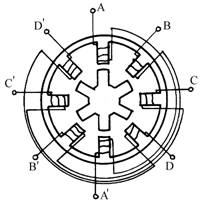
a) MPP cu reluctanta variabila poate fi cu o singura unitate stator-rotor (fig. 4.6.1 exemplificare a situatiei
cu 4 faze ), sau cu mai multe unitati
stator-rotor in
figura se observa ca statorul are l= poli aparenti iar rotorul are z= dinti Infasurarile polilor
diametral opusi sunt legate in serie
rezultand m=4 faze rotorul
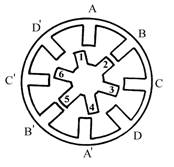
este figurat in pozitia de echilibru rezultata dupa aplicarea unui impuls de curent pe faza AA' la aplicarea unui al doilea impuls pe
faza BB' polii respectivi atrag dintii rotorici
2 si 5 care sunt cei mai apropiati si
rotorul efectueaza o rotatie in sens antiorar pana cand dintii respectivi se aliniaza cu polii B si B' (fig. 4.6.2) decalajul spatial unghiular al dintilor
rotorici fiind Δr=360s/ = 60s iar cel al polilor aparenti Δp=360s/ =
45s rezulta ca pasul unghiular al MPP
este Δαmpp=
45s-3 s = 15s iar numarul de pasi pe rotatie este 360s/15s = 24 aplicand
in continuare un impuls de curent pe faza CC'
vor fi atrasi dintii 3 si
s.a.m.d. pentru inversarea
sensului de rotatie ordinea alimentarii fazelor va fi AA' BB' CC' DD'.
a) b)
fig.3.33. Constructia motorului pas cu pas reactiv
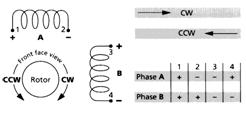
b) MPP cu magnet permanent in stator sau in rotor) este caracterizat prin prezenta unui flux de excitatie constant datorat magnetilor permanenti ceea ce ii confera proprietatea de a memora pozitia chiar si in absenta alimentarii fazelor. In fig.3.34a este prezentata constructia unui MPP de mica putere cu magneti permanenti in rotor, cu 2 infasurari (bifazat). Alimentand fazele statorice cu impulsuri bipolare cu amplitudini egale se executa pasii rotorului conform schemei din fig.3.34b. Daca amplitudinile curentilor in cele
Fig.3.34.
Constructia si functionarea MPP activ: a)constructia;
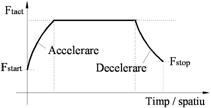
b) distributia impulsurilor de comanda; c) profilul de viteze.
2 infasurari sunt diferite (dar intr-un raport care sa asigure o intensitate constanta a campului magnetic rezultant), motorul va functiona in regim de "micropasire", deci cu divizarea electrica a pasului unghiular constructiv. Datorita constantelor de timp electro-mecanice ale MPP (si in aditie ale elementelor actionate), comanda pentru reglarea vitezei/pozitiei (respectiv a frecventei pasilor) trebuie realizata dupa un anumit profil a dependentei FTACT= f(Timp) (fig. 3.34c), contrar exista pericolul pierderii de pasi sau chiar al blocarii MPP.
c) b) a)

2 Comanda MPP
a) Comanda cu logica cablata.
Schema de comanda este de fapt o interfata intre µC si MPP
principial structura bloc este ilustrata in fig.
Comanda de la calculator contine informatia de sens si numarul de pasi care trebuie efectuati aceasta metoda fiind utilizata in cadrul echipamentului de prelucrare cu fascicul lasẹr realizat de autori si prezentat in §3
blocurile componente indeplinesc urmatoarele functii:
-filtru digital asigura calibrarea distantei dintre impulsuri si mentinerea frecventei acestora sub o valoare impusa de caracteristica cuplu-viteza a mpP (probleme in acest sens apar in special la regimurile tranzitorii de accelerare si decelerare);
Fig.3.35. Constructia si
functionarea MPP activ
 -distribuitorul de impulsuri preia trenul de impulsuri de comanda
standard impreuna cu comenzile de sens si furnizeaza la iesire trenuri de impulsuri decalate unele fata de altele cu
unghiul 2p/m (pasul electric)
-distribuitorul de impulsuri preia trenul de impulsuri de comanda
standard impreuna cu comenzile de sens si furnizeaza la iesire trenuri de impulsuri decalate unele fata de altele cu
unghiul 2p/m (pasul electric)
implementarea unui distribuitor se poate realiza cu numaratoare inel sau cu registre de deplasare;
-contactoarele statice cu
tranzistoare lucrand in comutatie au schema data in fig.3.36a. pentru
obtinerea unei amplificari sporite se foloseste conexiunea Darlington care impreuna cu D1,D2,R1 formeaza un inversor DTL pentru
reducerea puterii consumate in comutatie se reduc
timpii de blocare ai tranzistoarelor dar totodata creste si tensiunea autoindusa in infasurarea motorului. Aceasta poate cauza strapungerea tranzistoarelor si/sau a infasurarilor MPP,
motiv pentru care limitarea acestei tensiuni se face prin adaugarea unor componente care sa preia energia inmagazinata in campul
magnetic al infasurarilor mpp supresarea undei de supratensiune)
(fig.3.36b
b) Comanda cu logica programata.
In cazul conducerii MPP cu µC, o parte din functiile blocurilor prezentate in fig. pot fi realizate soft. Astfel, se pot elimina unele unor blocuri cum sunt:
-filtrul digital, care poate fi eliminat prin livrarea unor trenuri de impulsuri deja calibrate de catre µP;
-distribuitorul de impulsuri care poate fi simulat prin program (se pot implementa soft relativ unor functiile realizate de un registru sau de un numarator).
Solutia de principiu este prezentata in fig.3.37 si 3.38, pentru 2 situatii distincte:
- functionarea in bucla deschisa (fig.3.37), cand exista conditii de asigurare si pastrare a sincronismului intre impulsurile de comanda si miscarea MPP:
- in bucla inchisa (fig.3.38), cand exista pericolul "pierderii de pasi" (in cazul actionarilor de putere mare si medie)
Echipament (stand) pentru prelucrari 2D cu fascicul laser comandat de calculator si actionat cu MPP
a) Descriere generala.
In cadrul acestui paragraf se prezinta instalatia experimentala realizata de autori in cadrul laboratorului de prelucrari 2D cu fascicul laser al catedrei de Tehnologie mecanica a UT Timisoara Concret, este vorba de realizarea unui sistem de comanda numerica pe doua axe (coordonate XY) pentru actionarea, cu doua motoare pas a unei mese de lucru mobile. Sistemul este destinat debitarii materialelor nemetalice (textile, lemn, piele, cartoane, materiale plastice etc.) cu ajutorul fascicolului laser. principial, d.p.d.v. al solutiilor hard si soft adoptate, acestea se pot utiliza si pentru alte aplicatii similare ce impun generari de traiectorii 2D.
In fig. se prezinta schema principiala si elementele de baza ale standului compunerea generala si particularitatile constructive ale acestuia sunt urmatoarele:
masa in coordonate XY actionata independent pe cele doua axe de catre elementele de executie motoare pas cu pas sau servomotoare de curent continuu). Lantul cinematic de transmitere a miscarii este compus din:
angrenaj cilindric reducator cu raport 1:1 si mecanism de compensare a jocurilor la schimbarea sensului de rotatie;
mecanism surub-rola elicoidala, utilizat pentru transformarea miscarii de rotatie in miscare de translatie.
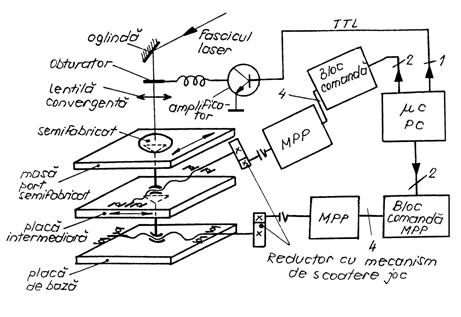
Pe directia z (verticala) exista posibilitatea unei pozitionari manuale prin intermediul unui mecanism surub-piulita, in vederea focalizarii
optime a fasciculului laser pe semifabricat
Fig 3.39. Structura echipamentului de prelucrare 2D cu fascicul laser
laserul cu CO de tip capsulat, cu functionare in emisie continua la puterea nominala de 100W
elementele de executie sunt doua motoare pas cu pas cu urmatoarele caracteristici:
numar de faze sau 4 (comutabil, pentru prescrierea cuplului motor);
pas unghiular: 0,9s sau 1,8s dependent de regimul de comanda
cuplu nominal Nm;
caracteristici electrice pentru o faza:
rezistenta
inductivitatea: mH
curentul nominal: 3A
blocurile de comanda (conform schemei bloc din fig. ) ale motoarelor pas cu pas au ca parametri de intrare cate un bit pentru sens si pentru tactul de comanda (semnale de nivel TTL) La iesire se furnizeaza trenuri de impulsuri cu amplitudinile corespunzatoare pentru alimentarea fazelor motoarelor pas cu pas Prin setarea unor comutatoare, se configureaza switchuri interioare pentru optiunea asupra regimului de lucru a distribuitorului de impulsuri pentru diferite regimuri ale MPP (pas intreg sau divizat, cuplu maxim sau redus).
practic aceste blocuri indeplinesc si functia de amplificatoare de putere compatibilizand nivelele semnalelor (TTL) de la iesirea din calculator cu nivelele de tensiune si curent necesare pentru comanda motoarelor pas cu pas.
calculatorul de comanda al intregului proces care este un calculator compatibil IBM-PC
b) Consideratii asupra modalitatii de transmitere a datelor
Se utilizeaza interfata paralela LPT a calculatorului (a se vedea §3.4) din cei opt biti de date fiind utilizati cinci cu urmatoarele semnificatii:
-bitul (pin de pe conectorul cu 2 de pini): sens motor axa x;
-bitul 1: sens motor axa y;
-bitul 2: tact motor axa x;
-bitul 3: tact motor axa y;
-bitul 4: daca este setat pe se comanda deschiderea obturatorului din calea fasciculului laser prin excitarea unui bloc intermediar (doua etaje cu tranzistoare bipolare) de comanda a bobinei electromagnetului de actionare. Prezenta acestui bloc este necesara pentru realizarea compatibilizarii intre tensiunea de nivel TTL de la iesirea calculatorului si cea necesara pentru comanda bobinei.
c) Consideratii asupra algoritmilor utilizati la realizarea interpolatoarelor
Primul deziderat propus la elaborarea resurselor soft a fost acela ca fisierul de intrare sa se alinieze la standardele internationale de realizare a codurilor pentru comanda masinilor-unelte cu comanda numerica (MUCN) astfel setul de programe elaborate trebuie sa decodifice functiile caracteristice de efectuare a interpolarilor liniare si circulare (G1,G2,G3) precum si functiile auxiliare (M3 M pornirea si respectiv oprirea actiunii sculei identificarea sfarsitului de program.) consecinta acestei caracteristici generale este posibilitatea de a programa desfasurarea procesului de prelucrare folosind una dintre urmatoarele trei posibilitati:
1) programare manuala, aplicabila numai in cazul unor prelucrari simple;
2) programare asistata de calculator, folosind limbajele dedicate de tipul APT LIPCON MASTERCAM KADY,
3) integrarea standului inṭr-un sistem CAD/CAM unitar, utilizind astfel pentru partea de proiectare constructiva un program specializat de exemplu AutoCAD ).
Datorita importantei covarsitoare pe care o au algoritmii de interpolare folositi in realizarea preciziei pozitionarilor si traiectoriilor in continuare se prezinta bazele algoritmice utilizate la elaborarea pachetelor de programe.
S-au testat din punct de vedere al preciziei realizate si al vitezei de raspuns urmatorii algoritmi
-algoritmi de tip ADN (analizor diferential numeric);
-algoritmi bazati pe calculul unui discriminant, in functie de semnul caruia se apreciaza pozitia punctului curent a traiectoriei aproximate fata de curba reala
-algoritmul diferentei coordonatelor, bazat pe emiterea de impulsuri pe cele doua axe cu o frecventa comandata dupa o anumita lege;
-algoritmi cu calculul direct a functiei prin metoda octantilor.
Comparandu-se performantele obtinute s-a optat pentru algoritmul bazat pe principiul analizorului diferential numeric, care desi inṭr-o anumita faza istorica a fost utilizat preponderent pentru implementari hard, este usor de transpus in limbajele de nivel inalt utilizate in prezent. In cele ce urmeaza se prezinta succint unele consideratii si relatii de calcul care au stat la baza implementarii acestui algoritm in surse C++:
-elementele de executie respectiv cele doua motoare pas cu pas de pe cele doua axe) si mecanismele intermediare de transmitere a miscarii sunt perfect identice astfel incat deplasarile pe cele doua axe corespunzatoare unui impuls deci a unui pas unghiular a MPP) vor fi egale Dx=Dy=D
- spatiile necesare a fi realizate pe cele doua axe notate cu X si Y se vor exprima in functie de deplasarile elementare definite anterior, cu ajutorul relatiilor:
X=p·D si Y=q D
unde p,q sunt numerele de pasi elementari (nr. de impulsuri transmise pe cele doua axe ) necesari pentru a se efectua deplasarile propuse pe cele doua axe X si Y;
- se pune problema de a administra distributia de impulsuri pe cele doua axe in concordanta cu legile de deplasare propuse. In acest scop se introduc cuante de calcul teoretice pe cele doua axe prin expresiile:
dx=X/N,
dy=Y/N
unde N este de asemenea o marime teoretica de calcul care trebuie sa fie mai mare decat maximul dintre p si q utilizarea lui N este fundamentala insa in tabloul de realizare a distributiei de impulsuri pe cele doua axe Ca urmare, se realizeaza o ciclare de la la N de fiecare data testandu-se daca este cazul sa se transmita un impuls pe una sau pe ambele axe conditia de transmitere a unui impuls este:
Nk dx < p1 D respectiv Nk dY < q1 D
p1, q fiind numarul de pasi elementari executati deja la momentul respectiv pe cele doua axe iar Nk valoarea momentana a lui N in timpul ciclarii de la la N.
 Exemplu de calcul:
Exemplu de calcul:
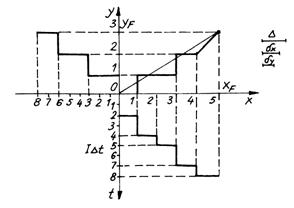
Lungimea segmentului ce trebuie interpolat liniar: X=5 Y=3 pasul D= (o unitate relativa iar N=8=23. Necesitatea ca N sa fie un numar binar se explica prin considerente constructive dupa cum s-a vazut. Rezulta:
Fig 3.40. Mecanismul
interpolarii pentru deplasarea pe doua axe
dx=5/8 si dy=3/8.
Mecanismul interpolarii este prezentat in tabelul
putand fi urmarit si in figura in care sunt
trasate atat functiile x(t) si y(t) cat si curba generata y=f(x)
Tabelul 3.3. Succesiunea pasilor executati pe axele X si Y.
|
tact de calcul |
dx)-Sx |
dy)-Sy |
tact pe axa X |
tact pe axa Y |
Sx |
Sy |
|
|
| |||||||
|
| |||||||
Consideratiile prezentate anterior au stat la baza implementarii interpolarilor liniare. Pentru realizarea interpolarilor circulare se apeleaza la mecanisme similare precedate de descompunerea arcelor de cerc in segmente infinitezimale
3.3.1. Rol si blocuri componente. Comparatie cu sistemul
intrarilor
logice.
Fig.3.10. schema intrarilor logice
Acest sistem
are rolul de a transmite spre proces semnale binare, care de obicei sunt
materializate pe canalul de comanda prin prezenta sau absenta
unei tensiuni sau a unui curent. Schema bloc este similara cu cea
prezentata in cazul sistemului intrarilor numerice(§3.2); sensul de
transmitere al informatiei fiind invers, se fac cateva referiri asupra anumitor
articularitati distinctive fata de sistemul intrarilor
numerice:
-diversitatea de elemente comandate este extrem de mare: bobine ale unor contactoare sau relee intermediare, bobine ale aparatajului de comanda pneumo-hidraulic, elemente electromecanice de executie (sarcini inductive), lampi de semnalizare etc. Toate aceste considerente impun diversificarea blocurilor de formare ale semnalelor de comanda, spre a realiza nivelul si forma optima a semnalelor;
-se pune problema adaptarii duratei comenzii numerice la cerintele elementului careia ii este adresata. in acest sens se pot transmite impulsuri de durata predeterminata de durata variabila, sau trenuri de impulsuri. durata sau numarul impulsurilor se poate stabili hard sau soft.
3.3.2 Particularitati
in interfatarea sistemului.
a)·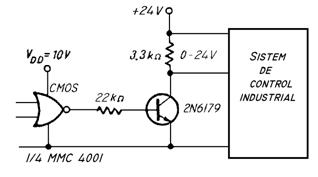
interfata
CMOS→ sistem industrial de control are schema
prezentata in fig.3.17. tranzistorul
este folosit drept convertor de nivel fiind comandat direct
de iesirea circuitului CMOS. impulsurile
cu fronturi lente, intalnite frecvent in sistemele de control si de
automatizari industriale pot fi evitate pentru a nu conduce la
comutari false, folosind un formator de impulsuri (exemplu triggerul
Schmitt MMC 4093).
fig. 3.17. interfata CMOS- sistem industrial de control
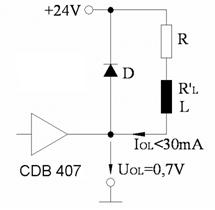
b) Interfatare unor sarcini inductive (bobine ale releelor)
In fig.3.18 se prezinta cazul folosirii
unei porti de putere TTL cu colector
in gol (CDB 407). dioda
D are rolul de a suprima supratensiunile care apar datorita tensiunii
autoinduse in bobina cand tranzistorul de la iesirea portii trece din starea de conductie in cea de blocare. rezistenta R limiteaza
curentul de iesire in starea 0
a portii.
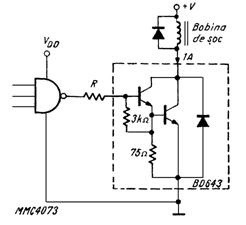
In
fig.3.19 se poate vedea modul in care o poarta CMOS poate comanda prin
intermediul unui tranzistor compus Darlington, un releu cu un curent de
anclansare de 1A.
fig.3.18. Comanda unei sarcini fig.3.19.Comanda unei
sarcini inductive cu
inductive cu poarta TTL de putere. poarta CMOS si tranzistor
Darlington.
c) comanda unei sarcini externe printr-o
iesire TTL.
In general, daca sarcina externa se alimenteaza de la +5V, comanda se poate realiza cu o poarta standard cu iesire in 0, limitand curentul de iesire la 16mA (fig.3.20a). Pentru comanda unor sarcini alimentate la tensiuni mai mari se utilizeaza etaje de iesire cu colector in gol, la care se specifica valorile tensiunii maxime si curentului maxim suportat, sau se conecteaza un
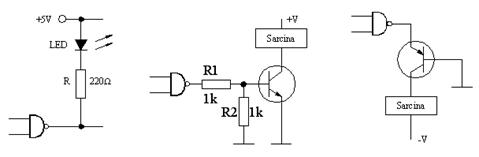
a) b) c)
fig.3.20. Comanda unor sarcini cu porti TTL.
tranzistor
extern la o poarta standard (fig.3.20b). in
cazul comutarii unor curenti de valoare mare se prevede o linie de
alimentare separata fata de traseul de masa TTL. comanda unei sarcini alimentate cu
tensiune negativa se face prin intermediul unui tranzistor pnp
(fig.3.20c).
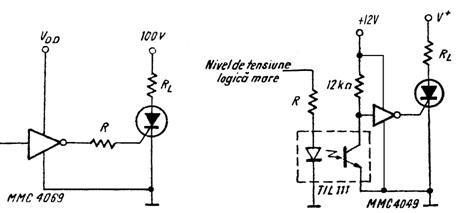
d) comanda tiristoarelor si triacelor se poate face prin iesirile circuitelor CMOS, conform schemelor din fig.3.21. tiristoarele sau triacele de mica putere pot fi comandate direct de la iesirea inversorului CMOS. in cazul tiristoarelor de puteri mai mari exista mai multe solutii:
a) b)
fig.3.21.
Comanda directa (a) si indirecta (b) a tiristoarelor.
-utilizarea unor buffere (separator inversor), exemplu MMC 4049 pentru familia CMOS;
-utilizarea unor etaje (simple sau compuse) amplificatoare;
-conectarea in paralel a mai multor porti logice CMOS de acelasi tip din aceeasi capsula pentru cresterea curentului debitat;
e) comanda discreta a aparatajului hidropneumatic
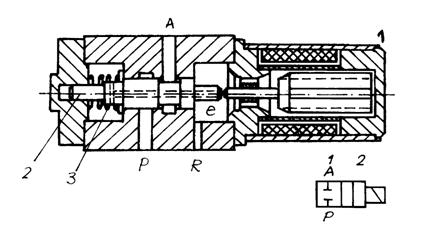
In cele e urmeaza se exemplifica cazul distribuitoarelor hidraulice (cele pneumatice sunt asemanatoare) care sunt elemente cu un numar finit de stari (pozitii ale sertarului), stari obtinute printr-o comanda adecvata, care poate fi manuala, mecanica, hidraulica sau pneumatica prin pilotare si electrica, situatie care intereseaza in acest cadru.
Actionarea electrica a
distribuitoarelor cu sertar se realizeaza cu unul sau doi
electromagneti de constructie speciala, care sunt fixati pe
unul sau ambele capace (fig. ). cand
electromagnetul (EM) 1 este
alimentat, sertarul 2 este impins
spre stinga si uleiul circula de la P (sursa de presiune) spre destinatia A. cind se intrerupe
curentul de alimentare al EM, sub actiunea arcului 3, sertarul este adus in pozitia indicata in figura,
intrerupand circulatia uleiului de la P
la A. eventualele scurgeri de ulei care ar patrunde in camera 4 sunt eliminate prin orificiul R la rezervor.
Actionarea electrica prezinta avantaje in ceea ce
priveste constructia si economicitatea. EM de comanda pot
fi alimentati in curent continuu (de regula 24 V) sau in curent alternativ
(220V). timpul necesar trecerii
sertarului dintr-o pozitie in alta este de 0.05-0.1 s, functie
de presiunea si debitul uleiului.
fig.3.22. Schema unui distribuitor hidraulic.
In cazul exemplelor din cele 2 paragrafe anterioare s-a utilizat cate o singura intrare sau iesire a µC utilizat. exista o mare varietate de aplicatii care presupun utilizarea mai multor intrari/iesiri, situatii care se vor trata in continuare.
3.4.1. Resurse soft pentru transmiterea
datelor. Utilizarea mastilor
a) Generalitati
Independent de tipul circuitului de interfata utilizat (8212 in cazul aplicatiilor mai simple, sau 8255 in cazul celor mai
complexe) transmiterea informatiei se face pe magistrala de date prin
intermediul unui octet sau unui cuvant transmis sau citit de la adresa
corespunzatoare portului utilizat.
Sunt utilizabile mai multe metode de transmitere a datelor, uzual fiind folosit transferul datelor prin program cu apelul instructiunilor specializate in acest sens:
-IN si OUT in cazul limbajelor de asamblare;
-int inport(int adresa_port) si void outport(int adresa_port, int valoare) in cazul limbajului C;
Deoarece, dupa cum s-a precizat, datele se transmit sub forma de octeti sau cuvinte, pentru utilizare individuala numai a anumitor biti se folosesc mastile. pentru aceasta se folosesc instructiunile (operatorii) la nivel de bit. in limbaje de asamblare acestia sunt foarte cunoscuti, in schimb in limbajele de nivel inalt aceste facilitati au aparut ulterior. In continuare se prezinta exemple de utilizare a mastilor in limbajul 'C'. in tabelul 3.2 sunt ilustrate efectele principalilor operatori la nivel de bit:
Tabelul 3.2.
Efectul operatorilor booleeni
|
|
|
|
|
|
|
b) Mascari.
Operatia de mascare (retinerea bitilor care intereseaza si anularea celorlalti) este o operatie tipica a operatorilor prezentati:
1. utilizarea functiei SI..
de exemplu:
pentru operatia: a = a&0x5f, masca este: 0x5f = 0101 1111, conducand la punerea pe 0 a bitilor 5 si 7 dintr-un octet. Asfel, daca:
a = 0x62 = 0110 0010
rezultatul operatiei si logic pe bit este:
a & 0x5f = 0100 0010
bitii 5 si 7 fiind pusi pe 0, iar ceilalti ramanand neschimbati.
2. utilizarea functiei SAU EXCLuSIV. cuvantul masca va avea bitii de valoarea 0 pentru bitii care nu necesita modificare si valoarea 1 pentru bitii care necesita complementare. exemplu:
a = 0x25 = 25H = 0010 0101
masca: m = 0xfa = FAH = 1111 1010
-------- ----- ------ ------
a^m = 1101 1111
3. utilizarea functiei SAU. cuvantul masca va avea bitii egali cu 1 in pozitiile care se doresc setate pe 1 si bitii egali cu 0 pentru pozitiile a caror valoare se doresc a ramine nemodificate . De exemplu:
daca masca
este m = 81H = 1000 0001, bitii 0 si 7 rezultati vor avea
valoarea 1, restul ramanand
neschimbati.
c)
Complementari
Cu
ajutorul operatorului ~ (negare) se pot obtine valorile in complement fata de 1 si 2 a unor numere
binare (algoritmi prezentati in § ). de
exemplu daca j este un numar binar i=~j+1 va fi complementul fata
de 2 al acestuia.
d) Deplasari cu un numar de pozitii
Se pot utiliza operatorii:
val<<nr.pozitii,
val>>nr.pozitii,
avand ca efect deplasarea la stanga si
respectiv la dreapta cu numarul de pozitii a valorii din stanga
operatorului. de exemplu, pentru :
a=2310 = 17h = 0x17 = 0001 0111
operatia v<<2 va avea ca efect:
v= 0101 1100 =0x5C =92
se observa
deplasarea codului binar cu 2 pozitii spre stanga, cei doi biti mai
semnificativi fiind eliminati, dar in schimb se insereaza in
dreapta 2 biti de 0. in cazul numerelor fara semn
aceasta deplasare echivaleaza cu o inmultire cu 2 la puterea
numerelor de pozitii. in
cazul de fata: 92 = 23*22.
in mod similar se interpreteaza deplasarea la dreapta cu precautii mai mari la interpretarea bitului de semn.
3.4.2 Interfatarea unui sesizor optic pentru digitizarea curbelor 2D
Prin digitizare se intelege determinarea perechilor de coordonate (x,y) ale unor puncte apartinand unei curbe (in acest caz curba plana 2D). numarul de puncte luate in considerare este un parametru la latitudinea utilizatorului.
Din punct de vedere constructiv se
utilizeaza 2 axe comandabile, eventual cu MPP (vezi § ), dupa legile impuse de µP si acestea in
concordanta cu semnalele percepute de sesizorul optic (fig.3.23). acesta furnizeaza la iesire
semnalul SETSØ (compatibil TTL) avand valoarea 0 in momentul sesizarii unei zone intunecate a desenului
si valoarea logica 1
atunci cand este in dreptul hartiei albe fara desen.
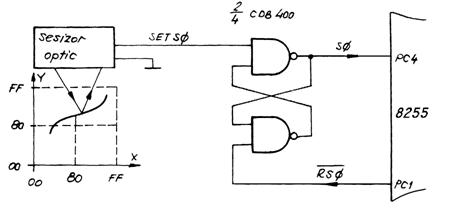
fig.3.23. Schema
de principiu al unui digitizor.
Conectarea
sesizorului optic la interfata programabila 8255 se face prin intermediul
unui circuit basculant bistabil RS realizat din 2 porti, cu rolul de a
elimina zgomotele care apar in semnalul SETSØ
datorita vibratiilor caruciorului. se reaminteste logica unui CBB-RS (bistabil asincron sau latch) care functioneaza
dupa urmatorul tabel de adevar:
 Domeniul
curbelor digitizate este determinat de cei 8 biti pentru fiecare dintre
cele 2 axe, biti furnizati de porturile PA si PB ale lui 8255. In
fapt, numarul de 8 biti determina finetea digitizarii,
domeniul de lucru fiind determinat de modul concret de realizare a
deplasarilor:
Domeniul
curbelor digitizate este determinat de cei 8 biti pentru fiecare dintre
cele 2 axe, biti furnizati de porturile PA si PB ale lui 8255. In
fapt, numarul de 8 biti determina finetea digitizarii,
domeniul de lucru fiind determinat de modul concret de realizare a
deplasarilor:
- corespondenta rotatiei unghiulare a
motorului
pentru 1 bit;
- eventuale
raporturi de reducere pe axe;
- raportul de transformare a miscarii
de rotatie motor in miscare de translatie a saniei.
Cursele maxime Xmax si Ymax vor corespunde valorii octetilor: FFh.
Digitizarea se realizeaza prin deplasarea cu pas constant a caruciorului pe axa X si determinarea ordonatei Y a curbei desenate pentru fiecare pozitie a caruciorului. Determinarea valorii ordonatei se face printr-un algoritm convergent de injumatatire desfasurat pe parcursul a cel mult 8 pasi, delimitandu-se din ce in ce mai strans zona pe axa Y unde se gaseste ordonata corespunzatoare a curbei:
-in primul pas al delimitarii pe Y se considera cursa jumatate din cea maxima: y=ymax/2. variabila de sens este s=1, pentru ca in cadrul acestui pas y a crescut; primul bit b0 (MSB) este 0, fiindca y>ynec, conform fig.3.24 (y necunoscut al curbei de digitizat);
-din analiza logica a valorii lui s si a inegalitatii anterioare in cel de-al doilea pas se comanda noua valoare curenta a lui y: y= ymax/2 - ymax/4; sensul variatiei lui y fiind scazator, s= -1; conform figurii, y>ynec (inca),
deci b1 va fi de asemenea 0;
-in pasul al treilea, noul y curent pentru comparatie va fi:
y=ymax/2-ymax/4-ymax/8; sensul
variatiei este scazator, deci s=
-1; conform figurii, y<ynec , deci rezulta b2=1;
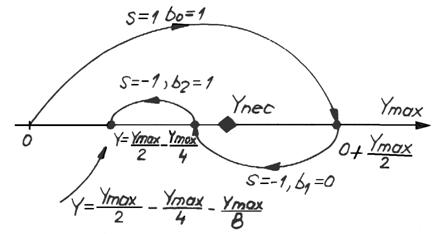
fig. 3.24.
Explicativa la algoritmul de digitizare.
-procesul continua similar pentru determinarea
celor 8 biti in 8 pasi;
La nivel de pseudocod, programul de comanda este urmatorul:
1. programarea lui 8255, cu PA, PB, PCl ca porturi de iesire si PCh ca semiport de intrare;
2. pozitionarea initiala in x=y=00h a sesizorului;
3. anulare
bistabil;
4. X=X+pas;
5. determinarea lui Y conform algoritmului de injumatatire;
6. memorare pereche de coordonate
7. salt la punctul 4, daca Xk < Xmax;
3.4.3 Cuplarea
unor LED-uri si comutatoare.
Este una dintre cele mai simple aplicatii posibile. se utilizeaza interfata paralela programabila 8255 la portul A fiind conectate 8 comutatoare fiecare avand posibilitatea de a furniza independent nivelele logice 1 sau 0 (fig.3.25). la portul C s-au conectat cele 8 led-uri, care vor fi aprinse sau stinse dupa cum bitii corespunzatori PC sunt 0 sau 1. Ne propunem ca aprinderea unui led sa reflecte starea apasata a butonului omolog. programul care realizeaza soft aceasta aplicatie este urmatorul:
programarea corespunzatoare a lui 8255.
Cuvantul de comanda este:
43h = 0100
0011;
citirea portului B intr-de registru al µP;
transmiterea aceluias registru la portul C
pentru comanda corespunzatoare a led-urilor;
subrutina de intarziere sau apelarea periodica
a ceasului de timp real pentru realizarea unei temporizari pana la
noua inspectare a starii contactelor;
salt la punctul 2.
fig. 3.25.
Cuplarea unor LED-uri si comutatoare la interfata paralela 8255
Utilizarea MPP in cadrul sistemelor de actionare electrohidraulica cu comanda discreta
Aceste sisteme sunt formate dintr-un MPP care preia informatiile numerice de la µP si le aplica unui amplificator hidraulic care transforma miscarea de rotatie a MPP in translatie a sertarului regland astfel energia (practic debitul) fluidului cu care este alimentat elementul de executie (hidromotor liniar sau rotativ).
In fig. a este ilustrata solutia constructiva pentru un servosistem destinat obtinerii miscarii liniare iar in fig.3.41b, schema mecano-hidraulica
a) b c
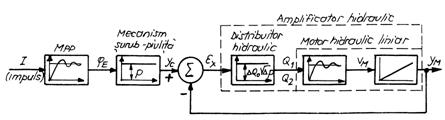
Fiecare deplasare unghiulara incrementala a MPP 1 este transmisa
Fig.3.41. Servosistem electrohidraulic cu comanda prin MPP:
a) constructia; b) schema mecano-hidraulica de comanda; c) Schema structurala
sertarului distribuitorului proportional si surubului solidar cu sertarul ca urmare surubul impreuna cu sertarul se vor deplasa axial ultimul deschizand calea de acces a uleiului de la pompa (intrarea notata cu p) spre una dintre conductele A (B) ce-l conduc la motor si de asemenea se deschide accesul de la una din conductele B (A) spre rezervor (iesire notata cu Rz) optiunea intre A si B este data de sensul deplasarii sertarului debitul de ulei patrunde in motor (in cazul analizat pe aria A1) si pistonul se va misca spre stinga (spre dreapta in fig. 3.41b), expulzand din cavitatea din stanga spre rezervor uleiul in exces deplasarea pistonului determina pe langa actiunea principala de deplasare a sarcinii exterioare F actionata prin intermediul tijei) si actiunea secundara concomitenta de deplasare axiala cu aceasi cursa a sertarului (prin imtermediul mecanismului surub piulita solidara cu sertarul) in sens contrar comenzii astfel se creaza reactia interna cu care se obtine anularea comenzii initiale
in fig. 1c este prezentata schema bloc structurala a intregului servomecanism.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |