
Modelele neurale directe si inverse ale sistemelor dinamice pot fi utilizate imediat pentru reglare. Au fost propuse un mare numar de structuri de control, cele mai simple fiind arhitecturi de reglare directa, fie prin supervizare, fie utilizand un model invers.
Controlul prin supervizare se bazeaza pe constatarea ca in numeroase situatii omul executa comenzi dificil de a fi implementate de un regulator automat proiectat prin tehnici clasice, mai ales datorita imposibilitatii de a obtine un model analitic al procesului condus. Un controler care imita actiunile omului efectueaza reglare prin supervizare, iar retelele neurale furnizeaza, impreuna cu sistemele expert, solutii pentru proiectarea unor astfel de controlere. Instruirea retelei este in principiu similara cu instruirea unui sistem cu model direct, descrisa mai sus. Intrarile retelei corespund informatiilor senzoriale receptate de operatorul uman, iar iesirile dorite utilizate pentru instruire corespund comenzilor de reglare aplicate de om sistemului.
Controlul cu model invers utilizeaza, evident, un model invers al procesului, cuplat in cascada cu procesul condus. Ansamblul rezultat da o traiectorie a iesirii sistemului condus identica cu cea a raspunsul dorit (adica a referintei). Reteaua neurala este inclusa direct in controler. Metoda este frecvent utilizata in aplicatiile cu roboti. Datorita problemelor de robustete ce pot aparea in functie de precizia modelului invers utilizat in regulator si datorita absentei reactiei negative, se recomanda utilizarea instruirii on-line, astfel incat parametrii modelului invers sa fie ajustati in permanenta.
Dintre tehnicile mai sofisticate de reglare cu ANN, cele mai promitatoare sunt controlul cu model de referinta, cu model intern sau controlul predictiv.
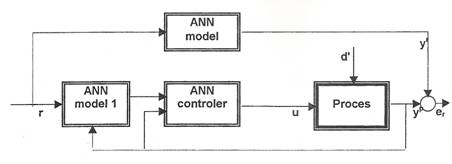
Figura III.63. Structura de control neural cu model de referinta
Controlul
cu model de referinta consta in specificarea performantelor
sistemului in bucla inchisa printr-un model de referinta M, care este definit prin perechile de
intrare - iesire .
Sistemul de reglare automata impune
iesirii procesului yp(t)
conditia ![]() , adica o evolutie asimptotica catre yr. O astfel de
structura de reglare pentru un sistem neliniar utilizand un model intern
conexionist este prezentata in Figura III.63. Dupa ce a fost
instruita reteaua model invers M1
al procesului, reteaua controler va fi la randul ei instruita prin
prelucrarea erorii er.
, adica o evolutie asimptotica catre yr. O astfel de
structura de reglare pentru un sistem neliniar utilizand un model intern
conexionist este prezentata in Figura III.63. Dupa ce a fost
instruita reteaua model invers M1
al procesului, reteaua controler va fi la randul ei instruita prin
prelucrarea erorii er.
Controlul cu model intern (IMC - Internal Model Control) reprezinta o metoda directa pentru proiectarea regulatoarelor neliniare cu reactie, ale carei proprietati de stabilitate si robustete sunt remarcabile:
daca procesul si regulatorul sunt stabile intrare - iesire si modelul M este o reprezentare perfecta a procesului, atunci sistemul in bucla inchisa este stabil intrare - iesire;
daca inversul operatorului ce descrie modelul procesului exista si acesta este utilizat ca regulator (astfel incat sistemul in bucla inchisa este stabil intrare - iesire), atunci reglarea va fi perfecta, adica yp =ys;
daca inversul unui model de stare exista, operatorul controlerului de stare este egal cu acesta iar sistemul in bucla inchisa realizat cu acest controler este stabil intrare - iesire, atunci, pentru intrari asimptotic constante, va fi atins regimul tranzitoriu constant.
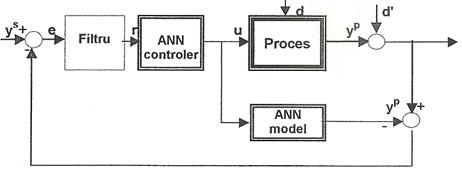
Figura III.64. Structura de control neural cu model intern
Un model neural M al procesului este plasat in paralel cu acesta, ca in Figura III.64. Diferenta intre iesirile procesului si ale modelului constituie semnalul de reactie care este prelucrat pe calea directa mai intai de un subsistem de reglare F, care este uzual un filtru liniar, proiectat de asa maniera incat sa introduca o anumita robustete a raspunsului sistemului in bucla inchisa. Ulterior, controlerul neural model invers C elaboreaza comanda de reglare u. Daca pot fi determinate retelele neurale M si C pentru sistemul direct si invers, realizarea controlului IMC este simpla. In cazul unui model ideal, sistemul in bucla inchisa ar urmari exact referinta, in ciuda perturbatiilor nemasurabile ce actioneaza asupra procesului real. Cum asa ceva nu se intampla niciodata in practica, filtrul F va contribui la o apropiere de cazul perfect, marind robustetea sistemului.
Implementarile structurilor IMC utilizand ANN sunt totusi limitate numai la sisteme stabile in bucla deschisa, acolo unde teoria este bine pusa la punct. Pentru proiectare se propune o procedura in doi pasi: mai intai se instruieste reteaua M utilizata ca model, folosind o structura similara cu cea din Figura III.64, cu particularitatile prezentate in paragraful anterior, iar apoi se alege reteaua controler care va fi instruita intr-una din arhitecturile din Figura III.62. Pentru evitarea influentei perturbatiilor, in locul procesului real se poate utiliza un model al acestuia, obtinut intr-o faza anterioara de instruire. Retelele instruite M si C sunt incluse in structura din Figura III.64.
Controlul predictiv este o procedura in trei pasi, care se repeta pentru fiecare moment de esantionare: dupa efectuarea unei predictii a iesirii sistemului pentru un anumit orizont viitor in timp, presupunand ca iesirile viitoare dorite sunt cunoscute, se cauta un set u de comenzi viitoare care sa minimizeze eroarea intre iesirile predictate si cele dorite si se aplica aceste comenzi procesului. Se poate demonstra ca metoda poate stabiliza atat sisteme liniare, cat si neliniare. Functia de cost utilizata pentru minimizarea erorii asupra orizontului viitor si elaborarea comenzii adecvate este:
![]() (6.42)
(6.42)
unde yr si ym sunt iesirea modelului de referinta, respectiv a procesului. Primul termen al functiei cost este o masura a distantei intre predictia modelului si traiectoria viitoare dorita, iar al doilea penalizeaza variatiile excesive in modificarea comenzii.
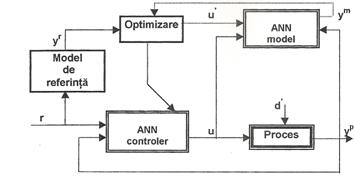
Figura III.65. Structura de control neural predictiv
O structura de control neural predictiv este prezentata In Figura III.65. Modelul neural M al procesului neliniar este instruit pentru a predicta iesirile viitoare. Acestea pot fi utilizate mai departe ca atare. Totusi, se recomanda ca predictiile sa se utilizeze pentru instruirea unei retele controler neural C, care reprezinta un model invers aproximativ al procesului. Daca se urmareste si o estimatie a perturbatiilor, modelul general de predictie utilizat pentru calculul comenzii va fi de forma:
 (6.43)
(6.43)
Controlul adaptiv s-a dezvoltat ca raspuns la cerintele reglarii sistemelor ai caror parametri de operare se modifica sau care sunt supuse la perturbatii semnificative. Schema generala de conducere adaptiva este prezentata in Figura III.66. Pentru fortarea procesului spre un raspuns dorit, se utilizeaza doua bucle: una de reglare si alta de ajustare a parametrilor. Controlul adaptiv cu model de referinta (MRAC) consta in modificarea continua a parametrilor controlerului cu metode de gradient, iar controlul adaptiv cu autoacordare identifica mai intai un anumit model al procesului (pe baza unei metode recursive de minimizare a unui criteriu patratic), utilizandu-se apoi parametrii modelului pentru a proiecta un controler clasic.
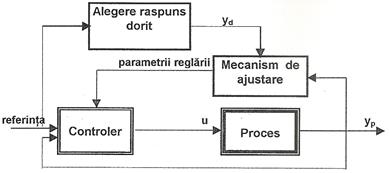
Figura III.66. Schema generala a controlului adaptiv
Ambele metode se bazeaza pe ipoteza ca procesul poate fi liniarizat cel putin in jurul unui punct de functionare. Cum insa multe sisteme industriale sunt puternic neliniare, apare si nevoia modelarii si controlului neliniar, iar retelele neurale pot constitui un nucleu pentru arhitecturi de reglare adaptiva. Ele pot fi proiectate ca simple controlere cu amplificare constanta, ca regulatoare neliniare adaptive sau ca extensii neliniare ale regulatorului adaptiv cu model de referinta (MRAC). Nu exista insa o teorie care sa recomande in aceste cazuri tipul potrivit de retea, numarului de neuroni sau modul de alegere al ponderilor de conexiune.
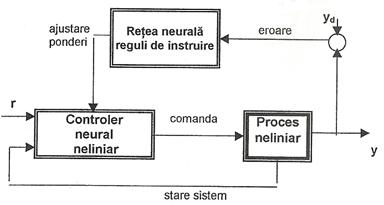
Figura III.67. Structura simpla de control neural adaptiv
O prima schema de control neural adaptiv este prezentata in Figura III.67. Reteaua neurala poate fi directa, unistrat sau multistrat. Ponderile ANN sunt ajustate in timpul fazei de instruire cu scopul obtinerii unui regulator neliniar care sa conduca procesul in asa maniera incat sa minimizeze o functie de cost. In reglarea adaptiva liniara, parametrii controlerului sunt ajustati utilizand tehnici bazate pe teoremele de stabilitate Liapunov si Popov, astfel incat eroarea intre iesirea procesului si raspunsul dorit ramane stabila si tinde asimptotic spre 0.
Aceaste solutii nu sunt
aplicabile in controlul neural, unde se folosesc tehnici de adaptare de tip gradient descrescator, care
minimizeaza functia de cost prin ajustarea amplificarii
regulatorului in directia negativa fata de gradientul
costului. In acest fel, eroarea de la iesirea procesului produce prin
reactie modificarea iesirii retelei neurale. Pentru obtinerea
acestui efect au fost propuse utilizarea jacobianului procesului si a
derivatei senzitive. Cercetarile pentru estimarea derivatelor se
bazeaza pe scheme de gradient descrescator MRAC. Daca functia de cost este J(W) si jacobianul procesului este cunoscut, gradientul
functiei este ![]() si poate fi
utilizat pentru instruirea ANN printr-un algoritm BP. Chiar daca sunt
disponibile un minim de cunostinte despre proces, este dificil a
obtine o expresie analitica exacta pentru jacobian iar
diferentierea numerica, utilizand o aproximare a acestuia, poate duce
la erori mari.
si poate fi
utilizat pentru instruirea ANN printr-un algoritm BP. Chiar daca sunt
disponibile un minim de cunostinte despre proces, este dificil a
obtine o expresie analitica exacta pentru jacobian iar
diferentierea numerica, utilizand o aproximare a acestuia, poate duce
la erori mari.
Exista metode prin care problema propagarii inapoi a erorii procesului catre controler sa fie mai usor rezolvata. Astfel, instruirea controlerului adaptiv neural se face utilizand semnul jacobianului, in care caz ecuatia de propagare inapoi a erorii devine:
 (6.44)
(6.44)
Widrow propune ca solutie un model neural direct al procesului, avand un canal pentru propagarea inapoi a erorilor catre controler. Reteaua este mai intai invatata sa produca un model al procesului neliniar, cuplat in paralel cu procesul real. Erorile de iesire ale procesului real vor fi propagate inapoi de-a lungul modelului pentru a forma gradientii necesari calculului comenzii. O a treia metoda consta intr-o abordare tip optimizare parametrica. Ponderile se ajusteaza una cate una direct, iar apoi este minimizata functia de cost. Alternativ, prin cautare stochastica, la vectorul actual al ponderilor este insumat un vector aleator de perturbatie si daca astfel se obtine un cost mai mic, noua pondere este adoptata. Pasii sunt repetati pana cand functia de cost este convenabil minimizata. Metoda nu se bazeaza pe gradient descrescator sau pe algoritmul BP si nu necesita cunoasterea jacobianului procesului.
Structura de reglare cu un controler adaptiv neural MRAC este prezentata in Figura III.68. Controlerul consta dintr-o lege de reglare cu amplificare fixa aleasa astfel incat sa stabilizeze procesul si sa asigure o reglare aproximativa, in paralel cu un regulator neural neliniar, cu o lege up = f(xp, xm, r). In paralel cu procesul condus functioneaza un model de referinta convenabil ales. Pentru ajustarea ponderilor retelei, in scopul atingerii eventualei convergente intre raspunsul modelului si cel al procesului, pe reactie este adusa printr-un algoritm BP eroarea E = yp - ym.
Configuratiile de control neural prezentate in acest paragraf duc la concluzia ca utilizarea retelelor neurale artificiale este in ansamblu benefica pentru depasirea unor dificultati in probleme de modelare si conducere a proceselor complexe. Exista si unele dezavantaje. In comparatie cu modelele liniare ARMAX sau cele neliniare NARMAX, modelarea prin ANN produce structuri care nu pot fi verificate cu date culese direct din proces. Intre natura fizica a procesului si distributia datelor in retea nu exista o relatie directa. Pentru sisteme complexe, generarea seturilor de date pentru o instruire eficienta poate deveni deseori o problema insolvabila. In plus, nu se poate stabili analitic cea mai buna topologie de retea, numarului optim de neuroni sau cel al straturilor ascunse. Nu exista metodologii general valabile pentru analiza robustetei si stabilitatii buclelor de reglare cu retele neurale.
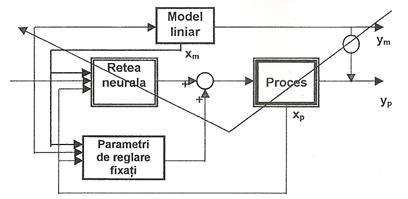
Figura III.68. Structura de control adaptiv neural MRAC
Cercetarile academice in acest domeniu sunt validate insa in domeniul aplicatiilor industriale si se estimeaza ca - intr-o perioada de maxim un deceniu - retelele neurale pot deveni realmente un instrument de lucru credibil si eficient pentru realizarea aplicatiilor de control automat al proceselor.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |