
Sistemul de avans automat al sapei de foraj
Deoarece in timpul operatiei de forare apasarea pe sapa se realizeaza prin greutatea partiala a prajinilor de foraj, avansul sapei trebuie facut cu mare precizie, de le depinzand randamentul procesului, verticalitatea gaurii de sonda, evitarea accidentelor. Aceste considerente la care se adauga cele legate de cresterea adancimii de foraj si extinderea forajului marin sunt cele care au stat la baza necesitatii automatizarii procesului de avans al sapei de foraj. Sistemul de avans automat al sapei de foraj realizeaza reglarea la o valoare constanta considerata optima a unei marimi tehnici logice care conditioneaza operatia de avans prin modificarea convenabila a vitezei de colaborare a capatului superior al garniturii de prajini, adica a vitezei la carlig, notat cu υc.
In general exista mai multe posibilitati de reglare a marimii alese, dar in prezent numai sistemul automat cu reglarea sarcinii pe sapa pot fi utilizate la toate cele 3 variante de forajrotativ. Exista si sisteme automate care realizeaza reglarea vitezei de rotatie a sapei, dar in special la forajul cu turbina, unde influenta momentului rezistent al sapei asupra vitezei de rotatie este mare ca si sistemul de reglare a puterii de rotatie a sapei (la forajul cu ME).
Teoretic pot fi realizate si SA cu reglarea momentului rezistent la sapa, dar acestea nu sunt folosite la practica datorita dificultatii masurare a momentului si de transmitere la suprafata a rezultatelor masurarii .
Schema bloc a sistemului autonom de avans al sapei de foraj :
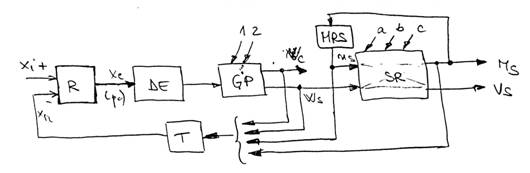
R = regulator; DE = dipozitiv de executie; GP = garnitura de prajinii; 1 - greutatea, lungimea si elasticitatea garniturii; 2 - frecarea dintre garnitura si fluidul de foraj / frecarea dintre garnitura si peretii gaurii de sonda; SR = subsistem sapa - roca; a - caracteristicile rocii; b - caracteristicile sapei; c - debitul si calitatea fluidului de foraj; MRS = motor rotativ submersibil; PC = presiune de comanda; Ms = momentul cuplului rezistent la sapa; Vs = viteza de avans a sapei; ns = viteza de rotatie a sapei; Ws = forta de apasare pe sapa; Wc = forta la carlig; Vc = viteza la carlig.
Obs.: In cazul forajului cu garnitura in miscare de rotatie viteza de rotatie a sapei este teoretic (practic) constant si prin urmare si SR se considera ca are o singura marime de intrare Ws si o singura marime de iesire Vs.
DE are rolul de a modifica viteza de coborare a garniturii in concordanta cu semnalul de comanda generat de regulator, care este pneumatic. DE utilizat poate fi :
a) - dispozitiv cu frana, cu banda sau cu saboti;
b) - cu frana cu pulbere magnetica;
c) - cu frana tip pompa volumetrica rotativa;
d) - cu frana tip dispozitiv diferential planetar cu 2 ME.
In fctie de parametrul care se regleaza, sistemul automat se clasifica in :
1)- sisteme automate de avans (SAA) cu reglarea sarcinii axiale pe sapa;
2)- sisteme automate de avans (SAA) cu reglarea vitezei de rotatie pe sapa;
3)- sisteme automate de avans (SAA) cu reglarea momentului cuplului rezistent la sapa;
4)- sisteme automate de avans (SAA) cu reglarea puterii de rotatie a sapei.
1) Exista 2 variante:
- cu reglare directa, propriu-zisa a sarcinii axiale pe sapa Ws;
- cu reglarea vitezei la carlig Vc.
Sisteme cu frana, cu banda sau cu saboti fuctioneaza in 2 variante : - cu fction continua ; - cu fction discontinua.
Datorita caracterului neliniar si variatiei in gauri largi a sarcinilor la carlig, sistemele cu functionare continua au DE realiz. sub forma unor sisteme de tip sistem automat cu reactie negativa dupa viteza de deplasare a garniturii la carlig. In cazul in care in locul De avand ca marime de iesire viteza de coborare la carlig se foloseste un DE cu marimi de iesire care actioneaza maneta de franare, SAA poate fi interpretatca un sistem de reglare a unui parametru (fie Vc, ns, Ws) in cascada cu reglarea vitezei la carlig a garniturii.
Ca exemplu dam un sistem clasic utilizat pt reglarea sarcinii la carlig :
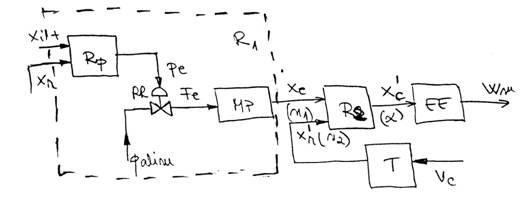
R1 = reg pricipal format din : Rp = reg pneumatic; RR = robinet de reglare; MP = motor pneumatic cu reductor.
R2 = reg secundar de tip diferential planetar, care tranforma difernta dintre vitezele de rotatie n1 si n2 intr-o deplasare unghiulara α a arborelui de iesire.
EE este un sistem de parghii transformand aceasta deplasare unghiulara intr-o forta Wm de actionare a manetei de franare a dispozitivului de frana cu banda.
Avantaj : Este cel mai folosit si elimina complet influenta neliniarit. sistemului de franare precum si a sarcinii la carlig. Obs: R1 este de tip integrator.
In cazul sistemelor de avans cu functionare discontinua deplasarea capatului superior al garniturii de prajini se face prin pasi succesivi generati prin slabirea franei atunci cand servomotorul de actionare a parghiei de comanda a franei primeste impulsuri de durata si intensitate corespunzatoare. Acest sistem este utilizat la forarea in adancime mica sau medie.
O modalitate de comanda a servomotorului consta in inserierea pe circuitul de alimentare a unei supape cu actionare electrica care va fi comandata de o schema de urmatorul tip :
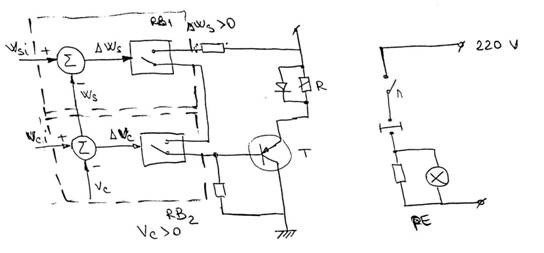
RB1 reg bipozitional pt sarcina axiala pe sapa si RB2 reg bipozitional pt viteza la carlig.
Contactele lui RB1 si RB2 sunt inchise numai cand valoarea pt Ws si Vc sunt inferioare celor prescrise (Wsi si Vci). In aceste conditii tranzistorul T va fi deschis, R este anclansat, iar contactul r normal deschis va inchide circuitul de alimentare al pilotului electric PE pt actionarea supapaei pneumatice, asigurand alimentarea pneumatica a SM si prin acesta slabirea franei.
Garnitura coboara sub actiunea propriei greutati, iar in momentul in care viteza la carlig depaseste valoarea presrisa ∆Vc<0, are loc schimbarea starii contactului de comanda al regulatorului RB2, tranzistorul T se blocheaza, r se deschide si se intrerupe alimentarea lui PE => are loc o strangere de catre SM a benzii sau sabotilor pe tamburul de franare.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |