Stabilitatea automobilului
Prin stabilitatea automobilului se defineste proprietatea acestuia de a ramane in permanenta in contact cu calea de rulare si de a urmari traiectoria impusa de conducatorul auto Pierderea stabilitatii se produce la aparitia patinarii, alunecarii, deraparii sau rasturnarii automobilului.
Daca la aprecierea curenta a performantelor automobilelor si in special ale autoturismelor, printre termenii frecvent folositi, privind performantele motorului (puterea maxima,consumul orar sau consumul specific, etc.) sau ale intregului automobil (acceleratia, viteza maxima, timpul si spatiul de demarare, timpul si spatiul de franare, organizarea si compunerea transmisiei, tipul franelor, directiei si suspensiei, consumul de combustibil la 100 de km, dotarile si echipamentele folosite, etc.) arareori se regasesc si informatii sau aprecieri privind limitele de asigurare a stabilitatii, pe care automobilul este capabil sa le indeplineasca in anumite regimuri de deplasare.
Apreciem ca sunt dificil de precizat astfel de performante si criterii limita, avand in vedere diversitatea regimurilor de deplasare pe care un automobil le poate avea de-a lungul vietii sale. Data fiind insa importanta pastrarii stabilitatii automobilului in orice conditii de deplasare, pentru siguranta pasagerilor aflati in interior cat si pentru ceilalti participantii la trafic, pentru siguranta marfurilor transportate, tinand seama si de viteza de deplasare a automobilelor, astfel de criterii devin tot mai necesar a fi stabilite si precizate, inca din faza de conceptie si facute cunoscute oricarui cumparator de automobile, pentru ca cei interesati sa cunoasca modul lor de conducere si folosinta in siguranta.
Este daunator si neeconomic ca un automobil sa nu corespunda din punct de vedere tehnic tot timpul, ca unele din partile sale componente sa nu atinga sau sa nu-si mentina parametrii de functionare prevazuti de catre fabricant, dar este extrem de periculos ca el sa-si piarda stabilitatea, indiferent de cauzele care ar genera acest fapt, deoarece, in astfel de situatii, se pierde controlul automobilului respectiv, cu toate consecintele care decurg de aici.
Avand in vedere multitudinea conditiilor de deplasare pe care un automobil le poate asigura ,ca si multitudinea situatiilor intalnite in practica conducerii rutiere, nu pot fi precizate mereu limtele de stabilitate sau comportamentul la limita al automobilului pentru toate aceste regimuri.Totusi anumite regimuri preponderent intalnite pot fi analizate, putandu-se determina conditiile limita la care se poate pierde stabilitatea automobilului. Astfel in cele ce urmeaza vor fi analizate conditiile de stabilitate ale automobilului la deplasarea rectilinie si in viraj, la demarare sau franare, la urcarea rampelor sau la coborarea pantelor.
![]()
1.Stabilitatea longitudinala a automobilului
Pierderea stabilitatii longitudinale a automobilului poate aparea la urcarea rampelor sau coborarea pantelor mari, in timpul demarajului sau franarii, prin patinare sau alunecare longitudinala sau prin rasturnare.
In cazul automobilului avand puntea motoare in spate,care urca o rampa de unghi , in regim de miscare accelerata,, figura 1., pentru analiza posibilitatilor de pierdere a stabilitatii se scriu ecuatiile de echilibru de forte paralele, respectiv perpendiculare, pe planul caii de rulare:
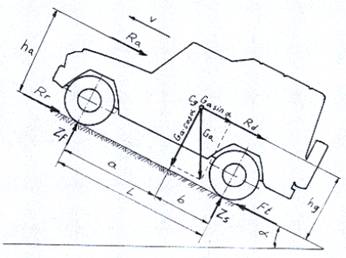
![]() Fig.1. Studiul
stabilitatii la urcarea rampelor
Fig.1. Studiul
stabilitatii la urcarea rampelor
∑X = Ft - Ga sina -Rd -Rr -Ra=0 (1.)
∑Y= Zf + Zs- Ga cosa
unde:
-Ft este forta de tractiune care propulseaza automobilul, Ga reprezinta greutatea totala a automobilului iar Rd, Rr si Ra sunt, respectiv, rezistentele la demarare, la rulare si rezistenta aerului;
Zf si Zs reprezinta reactiunile verticale la puntea fata, respectiv, spate.
Pierderea stabilitatii automobilului prin rasturnare poate aparea in jurul axei rotilor din spate si se poate produce atunci cand suma momentelor de rasturnare depaseste suma momentelor stabilizatoare, scrise in raport cu centrul de greutate adica:
Ft .hg+Ra . (ha -hg )+Zf .a Zs .b+Rr .hg (3.)
Deoarece
in momentul rasturnarii Zf =0 si Zs = Ga cos ![]() iar
din relatia 1. forta
de tractiune este : Ft = Ga sin
iar
din relatia 1. forta
de tractiune este : Ft = Ga sin![]() +Rd + Rr + Ra,
rezulta ca inegalitatea 3.devine:
+Rd + Rr + Ra,
rezulta ca inegalitatea 3.devine:
hg . (Ga sin![]() + Rd + Rr + Ra)
+ Ra . (ha - hg) Zs
.b +Rr .hg (4.)
+ Rd + Rr + Ra)
+ Ra . (ha - hg) Zs
.b +Rr .hg (4.)
sau
(Ga sin![]() +Rd) .hg + Ra
.ha b. Ga .cos
+Rd) .hg + Ra
.ha b. Ga .cos![]() (5.)
(5.)
Tinand seama ca rasturnarea se poate produce pe rampe mari,cand vitezele sunt reduse si constante, deci rezistenta aerului are valori foarte mici (Ra ~ 0) iar rezistenta aerodinamica este nula, se poate scrie relatia:
hg.Ga .sin b .Ga .cos (6.)
Din aceasta inecuatie se poate determina conditia de rasturnare a automobilului in jurul axei rotilor din spate. Pentru aceasta tangenta unghiului la care apare rasturnarea, tg r va fi :
tg r ![]() (7.)
(7.)
Pierderea stabilitatii automobilului la urcarea unei rampe, prin patinarea rotilor motoare, se poate produce atunci cand forta de tractiune depaseste forta de aderenta , adica:
Ft ≥ j . Zs (8.)
unde:- Zs este reactiunea verticala a caii de rulare la puntea motoare spate.
Folosind relatia 2.9.6. in conditiile in care Ra ~ 0, Rd = 0, Rr ~ 0, din relatia 8 rezulta:
Gasin j ![]() (9.)
(9.)
Adusa la o forma mai simpla inecuatia devine:
tg αp
≥ ![]() (10)
(10)
in care αp este unghiul rampei la care apare patinarea rotilor motoare spate.
Punand conditia ca patinarea sa se produca inaintea aparitiei rasturnarii,
tg p ≥ tg r din relatiile 7. si 10. se poate scrie inegalitatea:
![]() ≤
≤ ![]() (11.)
(11.)
sau
![]() (12.)
(12.)
In cazul tractiunii pe puntea din fata, conform relatiei 2.9.21., punand conditia ca patinarea sa apara inintea rasturnarii si tinand seama de inegalitatea 7. se poate scrie relatia:
![]() ≤
≤ ![]() (12.)
(12.)
care devine:
L ≥ 0 (13.)
Inecuatia este permanent respectata, ceea ce arata ca in cazul tractiunii pe puntea din fata a automobilului rasturnarea acestuia in jurul axei puntii spate nu este posibila, deoarece la orice valoare a coeficientului de aderenta , patinarea rotilor motoare fata apare inainte de a se ajunge la conditia de rasturnare.
In cazul tractiunii integrale , tinand seama de relatia 2.9.29. si de inegalitatea 7. se poate scrie relatia:
![]() (14.)
(14.)
Cunoscand ca, in general, b > hg raportul acestor marimi este supraunitar si, in consecinta, este mai mare decat valoarea maxima posibila a coeficientului de aderenta , ceea ce inseamna ca rasturnarea este foarte putin probabila, deoarece este precedata de patinare sau alunecare longitudinala.
Stabilitatea longitudinala la coborarea pantelor
Pericolul rasturnarii longitudinale in jurul rotilor din fata apare la coborarea unor pante cu inclinare foarte mare, cand automobilul este franat si are viteza redusa (fig.2.).
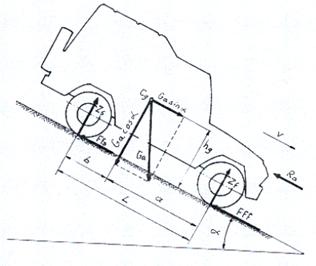
Fig.2. Studiul stabilitatii la coborarea pantelor
Considerand ca viteza de coborare este mica si constanta datorita fortelor de franare la puntea fata, Fff , respectiv, la puntea spate, Ffs, si ca rezistenta la rulare Rr si rezistenta aerului Ra pot fi neglijate, rezulta:
Rd = 0; Ra 0; Rr (15.)
Conditia de rasturnare in jurul rotilor din fata este data de relatia:
( Fff + Ffs) . hg + Zs * b > Zf * a (16.)
Conditia de alunecare a rotilor se poate calcula cu relatia:
Fff + Ffs > j . (Zf+Zs) (17.)
Tinand seama ca la rasturnare reactiunea Zs=0 , rezulta ca:
hg . j . Ga . cos > a . Ga . cos (18.)
de unde:
![]() (19.)
(19.)
Dar, la toate constructiile de autovehicule inegalitatea a > hg, deci ![]() ; in concluzie, rasturnarea
longitudinala a automobilelor la coborarea pantelor este imposibila;
ele vor aluneca cu rotile blocate, daca este indeplinita
conditia de blocare, ceea ce trebuie evitat, pentru siguranta
circulatiei.
; in concluzie, rasturnarea
longitudinala a automobilelor la coborarea pantelor este imposibila;
ele vor aluneca cu rotile blocate, daca este indeplinita
conditia de blocare, ceea ce trebuie evitat, pentru siguranta
circulatiei.
![]()
2. Stabilitatea transversala a automobilului la mers rectiliniu.
Prin stabilitate transversala se defineste capacitatea automobilului de a se opune alunecarii sau rasturnarii laterale in raport cu dreapta care uneste centrele petelor de contact de pe aceeasi parte a automobilului. La mers rectiliniu, pe drum orizontal, stabilitatea transversala este influentata de interactiunea dintre rotile automobilului si calea de rulare , la franare si accelerare.
![]()
 R
R
 Ff
Ff

Ft Fy
Fig.2.Schema fortelor dintre pneu si calea de rulare
In figura 2. sunt prezentate fortele care apar in suprafata de contact a rotii R cu calea de rulare: Ft este forta de tractiune, Ff este forta de franare, iar Fy este forta laterala, cauzata de forta centrifuga, de forta vantului sau de inclinarea transversala a caii de rulare.
In figura 3. este prezentat cazul unui automobil cu tractiune si franare pe toate rotile, pentru care se analizeaza proprietatile de stabilitate, in regim de demarare sau in regim de franare. Semnificatia notatiilor din figura este urmatoarea: Fi este forta de inertie, care este concentrata in centrul de greutate cg al automobilului, Ft este forta de tractiune, iar Ff este forta de franare tangentiala.
Astfel , de exemplu (cazul 4 din figura ) , daca in cursul franarii se blocheaza rotile din spate, fortele de ghidare laterala, care se opun deraparii laterale a acestor roti, se anuleaza, automobilul ramanand ghidat lateral numai de rotile din fata. Daca in aceasta situatie de echilibru instabil centrul de greutate in care se aplica forta de inertie FI este putin deplasat fata de axa longitudinala a automobilului sau, daca fortele de tractiune de la roti nu sunt egale, apare un
Fig.3.Schema de studiu a stabilitatii transversale a automobilului
moment de rotire caruia nu i se opune nici un moment stabilizator si care provoaca deraparea partii din spate a automobilului. Pe masura ce se produce derapajul momentul de rotire sporeste, putandu-se ajunge la intoarcerea completa a automobilului cu 1800, daca centrul de greutate nu revine pe axa longitudinala a automobilului sau daca nu se reface echilibrul fortelor de tractiune la rotile fata..
In cazul blocarii prin franare a rotilor din fata (cazul 3 din figura) , forta de inertie si fortele de franare, care actioneaza asupra rotilor din spate, dau o situatie de echilibru stabil; in acest caz efectul se rezuma cel mult la mici derapaje cu caracter pendular, in dreapta si in stanga directiei de mers.
In cazurile 1 si 2 din figura 3., poate fi studiat, asemanator, procesul de pierdere a stabilitatii transversale, in regim de accelerare, in cazul patinarii rotilor din fata (cazul 1), respectiv rotilor din spate (cazul 2). Se observa ca situatia de echilibru stabil apare in cazul 2, ca urmare a actiunii fortelor de tractiune Ft care actioneaza asupra rotilor fata si a actiunii fortei de inertie Fi.
Daca la deplasarea automobilului pe o cale de rulare cu aderenta redusa valoarea aderentei, la un moment dat, nu este aceeasi la toate rotile, poate aparea derapajul automobilului, fara interventia conducatorului sau.
In mod normal , deraparea laterala nu incepe simultan la toate rotile iar daca aceasta apare are drept cauza faptul ca valorile reactiunilor tangentiale si transversale nu sunt aceleasi la toate rotile.
b. a.
Fig.4. Schema derapajului lateral al puntii fata
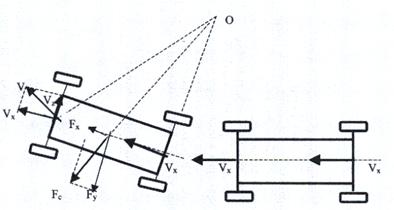
In figura 4. sunt reprezentate pozitiile unui automobil aflat, initial,(cazul a) in miscare rectilinie, cu o viteza Vx si, ulterior, (cazul b), dupa ce rotile din fata au inceput sa derapeze cu o viteza transversala Vy, ca urmare a actiunii unor forte laterale.
Daca se determina viteza rezultanta V , prin compunerea geometrica a vitezelor Vx si Vy ,atunci centrul instantaneu de virare O se afla la intersectia perpendicularei pe vectorul V, proiectat pe planul caii. de rulare, cu prelungirea proiectiei axei puntii spate pe oplanul caii de rulare. La aparitia deraparii rotilor puntii fata in centrul de greutate cg al automobilului actioneaza forta centrifuga Fc, pe directia razei Ocg, forta care se descompune intr-o componenta longitudinala-forta de inertie longitudinala Fix si intr-o componenta transversala Fiy. Din figura se poate observa ca forta centrifuga Fc actioneaza in sens invers derapajului, tinzand sa readuca automobilul pe directia initiala de deplasare Vx.
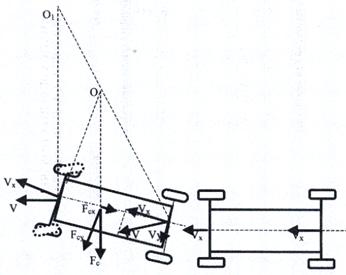
In figura 5. sunt reprezentate pozitiile unui automobil aflat, initial (fig.5.a) in miscare rectilinie cu o viteza Vx si, ulterior, (fig.5.b), dupa ce rotile din spate au inceput sa derapeze (spre stanga)cu o viteza transversala Vy .
b. a.
Fig.5.Schema derapajului puntii spate
Centrul instantaneu de rotatie O se afla pe prelungirea proiectiei axei puntii fata (rotile de directie sunt paralele cu planul longitudinal al automobilului). In acest caz componenta transversala Fiy a fortei centrifuge Fc actioneaza in sensul mentinerii si amplificarii deraparii. Pentru oprirea deraparii conducatorul automobilului trebuie sa roteasca volanul contra derapajului (rotile directoare reprezentate cu linie intrerupta). Prin aceasta manevra centrul instantaneu de rotatie al automobilului se muta din punctul O in punctul O1, la o raza O1cg mai mare, situatie care conduce la micsorarea fortei centrifuge Fc. Daca unghiul mijlociu de bracare a rotilor directoare, numit unghi de contraderapaj, aduce planul median al acestor roti paralel cu vectorul vitezei rezultante V a punctului mijlociu P al puntii spate, atunci noul centru de viraj O1 se deplaseaza la infinit, forta centrifuga devine nula iar derapajul puntii spate inceteaza, automobilul revenind la directia initiala de deplasare.
La bracarea rotilor directoare cu un unghi mai mare decat unghiul de contraderapaj se provoaca derapajul rotilor puntii spate in sens invers sensului initial de derapare.( spre dreapta, in figura 5.). Pentru eliminarea acestui derapaj este nevoie de rotirea convenabila a volanului in sens contrar derapajulufi.
Deoarece valoarea fortei centrifuge este proportionala cu patratul vitezei ar rezulta ca micsorarea vitezei prin franare va conduce la amorsarea unui derapaj incipient. Aparitia unei forte tangentiale de franare Ff are ca rezultat micsorarea, uneori pana la anulare, a reactiunii transversale a caii de rulare asupra rotii si, prin aceasta, favorizarea alunecarii sale laterale. La aparitia derapajului rotilor puntii spate franarea este contraindicata, deoarece , in loc sa se obtina reducerea si eliminarea derapajului, se favorizeaza amplificarea lui, putandu-se ajunge la pierderea controlului automobilului.
Derapajul lateral al puntii spate este dificil de atenuat si prin faptul ca manevrele la volan, care ar conduce la diminuarea si eliminarea derapajului, sunt manevre inverse reflexelor dobandite de conducatorii de automobile.
![]()
3. Stabilitatea transversala la mersul in viraj
Datorita inclinarii transversale a soselelor in curbe valorile din stanga si din dreapta ale reactiunilor normale la rotile din dreapta si din stanga ale automobilului vor avea valori diferite intre ele.
Pierderea stabilitatii transversale a automobilului, la deplasarea in viraj, pe o cale de rulare avand unghiul de inclinare transversala β, se poate produce prin aluncare laterala sau prin rasturnare, datorita actiunii fortei centrifuge, care apare in astfel de situatii.
Forta centrifuga Fc si greutatea totala a automobilului Ga se descompun in componente paralele si perpendiculare pe calea de rulare. Rasturnarea automobilului poate apare atunci cand suma momentelor de rasturnare fata de dreapta care uneste punctele de contact ale rotilor de pe partea dreapta cu calea de rulare este mai mare decat suma momentelor de stabilitate in rort cu aceeasi dreapta:
Pentru aflarea reactiunilor normale la rotile din stanga se va exprima conditia de echilibru dinamic, luand momentele in raport cu dreapta ce uneste punctele de contact cu calea ale rotilor din dreapta, fig.6.:
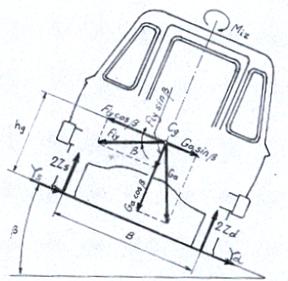
Fig.6. Schema automobilului in viraj
2Zs . B +(Fc . cos
β -Ga . sin β) . hg > (Fc
. sinβ +Ga . cos β) . ![]() (20.)
(20.)
Daca se tine seama ca la aparitia rasturnarii Zs= 0 din relatia 6.2.1. se poate calcula tangenta unghiului la care poate aparea rasturnarea:
tg
β =  (21.)
(21.)
In timpul virajului apare forta centrifuga data de relatia:
Fc = ![]() (22.)
(22.)
in care: V este viteza automobilului in viraj, in [m/s], iar R este raza virajului in [m].
Inlocuind expresia fortei centrifuge, data de relatia 22. in relatia 21. se obtine:
tg
βr =  (23.)
(23.)
Din relatia 23. se poate obtine valoarea vitezei limita de rasturnare Vr a unui automobil care se deplaseaza in viraj, avand raza curbei R:
Vr
=  [m/s] (24.)
[m/s] (24.)
Din
relatia 24. se observa ca prin marirea unghiului β, de
inclinare transversala a drumului, se obtine cresterea vitezei
limita de rasturnare, iar la valoarea tg β =![]() viteza automobilului poate sa devina oricat de mare
(Vr = ∞), fara ca sa se mai produca
rasturnarea. Cu cat vitezele de deplasare ale automobilelor sunt mai mari
cu atat mai mult trebuie inclinate caile de rulare in viraje.
viteza automobilului poate sa devina oricat de mare
(Vr = ∞), fara ca sa se mai produca
rasturnarea. Cu cat vitezele de deplasare ale automobilelor sunt mai mari
cu atat mai mult trebuie inclinate caile de rulare in viraje.
Daca automobilul se deplaseaza in viraj, pe o cale de rulare orizontala (β =0), viteza limita la care poate aparea rasturnarea va fi:
Vr
=  [m/s] (25.)
[m/s] (25.)
La deplasarea in viraj automobilul isi poate pierde stabilitatea si prin derapare laterala, sub influenta fortei centrifuge. Deraparea automobilului apare daca este indeplinita conditia:
Fc . cos β -Ga . sin β > Ys + Yd (26.)
Valoarea maxima a sumei reactiunilor transversale este limitata de forta de aderenta transversala:
Ys + Yd = φ . (Fc . sinβ + Ga cos β) (27.)
Inlocuind relatia 27.in relatia 26. se obtine:
Fc . cos β -Ga . sin β > φ . (Fc . sinβ + Ga cos β) (28.)
Din inegalitatea 28, la limita, rezulta valoarea unghiului de inclinare transversala a drumului, la care apare patinarea laterala a automobilului:
tg βp = ![]() (29.)
(29.)
Daca se inlocuieste expresia fortei centrifuge Fc ,din relatia 22., se obtine:
tg βp =  (30.)
(30.)
Din relatia 30. se poate determina valoarea vitezei limita de deplasare a automobilului in viraj, pe drum inclinat cu unghiul β, fig.6., la care poate aparea deraparea laterala:
Vd
=  (31.)
(31.)
La intrarea in viraj, pe drum orizontal,( β = 0 ), viteza limita de deplasare la care apare deraparea va fi:
Vd
= ![]() [m/s] (32.)
[m/s] (32.)
In calculele efectuate nu s-a tinut seama ca in suprafata de contact a rotilor cu calea de rulare mai actioneaza si forte tangentiale, de tractiune sau de franare (vezi fig.2), care determina ca, atat patinarea cat si rasturnarea, sa apara mai repede decat o arata, prin calcul, relatiile anterior determinate.
Avand in vedere faptul ca rasturnarea transversala, ca, de altfel, orice tip de rasturnare, este mai periculoasa decat deraparea laterala, se recomanda ca viteza limita de derapare Vr sa fie mai mica decat viteza limita de rasturnare Vd, adica este de preferat ca deraparea laterala a automobilului sa apara inaintea rasturnarii:
![]() < (33.)
< (33.)
sau: φ < ![]() (34.)
(34.)
Relatia 34. este, in general, indeplinita la cele mai multe automobile, putand, uneori, exista si exceptii de la regula, cum este cazul autobuzelor supraetajate.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
