
MASINI SI INSTALATII UTILIZATE LA LUCRARILE DE RIDICAT
1. CLASIFICARI
Masinile de ridicat se folosesc la lucrarile de constructii pentru montarea elementelor mari prefabricate ale cladirilor industriale si de locuit, pentru instalarea si montarea utilajelor, pentru aducerea pieselor si a materialelor de constructii la locul de asezare si pentru operatii de incarcare si descarcare in depozite. Ele pot fi impartite in functie de caracteristicile lor constructive (miscarea principala a masinii) in aparate de ridicat, ascensoare si macarale.
a) Mecanismele de ridicat (vinciurile, troliile, palanele si carucioarele de translatie)
Acestea au actiune intermitenta si se utilizeaza la ridicarea sau prinderea, ridicarea si deplasarea sarcinilor individuale; ele pot lucra ca aparate independente sau ca parti componente ale instalatiilor mai complexe de ridicat.
b) Ascensoarele
Sunt instalatii cu o singura miscare (de translatie verticala sau putin inclinata) si cu actionare periodica, caracterizandu-se prin aceea ca au dispozitive pentru ghidarea sarcinii si puncte fixe pentru incarcare si descarcare.
c) Macaralele
Acestea sunt masini de ridicat, stationare sau deplasabile, cu doua sau trei miscari, fiind folosite la ridicarea si la transportarea sarcinilor suspendate intr-un spatiu limitat; ele sunt prevazute cu constructie metalica pentru conducerea sarcinii si pentru sustinerea mecanismelor proprii la randul lor se clasifica in:
C1) macarale rotitoare stationare cu deplasare pe cai cu sine si cu deplasare pe cai fara sine, in categoria carora intra cele cu coloana rotitoare cu brat si contrafisa, cu brat oscilant, cu catarg fix, cu catarg deplasabile pe cai cu sine, turn deplasabile pe cai cu sine, macarale pe carucior, pe pneuri, pe senile si automacarale ;
C2) macarale cu platforma rulanta de tipul cu cale de rulare suspendata, cum ar fi podurile rulante sau macaralele capra.
C3) macarale diverse (funicular, etc.)
2. PARAMETRII CARACTERISTICI
GENERALI AI MASINILOR DE RIDICAT
Acestia sunt: sarcina de lucru, vitezele diferitelor miscari, regimul nominal de exploatare, inaltimea de ridicare, dimensiunile de gabarit si productivitatea. Productivitatea teoretica a masinilor de ridicat (cu actiune intermitenta) este definita de cantitatea de materiale de un anumit fel deplasata in unitatea de timp (de regula intr-o ora), in anumite conditii de lucru. Se determina cu relatia:
Qh=ncQ, [tf/h]
unde
![]() reprezinta
numarul de cicluri pe ora ;
reprezinta
numarul de cicluri pe ora ;
![]() - durata unui ciclu in
<< s
>>;
- durata unui ciclu in
<< s
>>;
Q - greutatea sarcinii utile , in ![]()
Mai mult , productivitatea se poate determina cu relatia
![]()
![]() [
[![]() ]
]
unde
kq
= ![]() este coeficientul de
utilizare a capacitatii de ridicare;
este coeficientul de
utilizare a capacitatii de ridicare;
kt
= ![]() este factorul de
utilizare;
este factorul de
utilizare;
Qe - sarcina efectiva;
Q - sarcina de lucru;
te - timpul efectiv lucrat ,.
t - timpul de lucru
Coeficientii estimati, de mai sus, pot fi:
kq =0,6 ÷ 0,95 la lucrari de montaj;
kq = 0,8 ÷ 0,95 la lucrari de incarcare-descarcare;
kt = 0,7 ÷ 0,8 la lucrari de montaj;
kt =0,8 ÷ 0,95 la lucrari de incarcare-descarcare.
Echipamentul electric se alege in functie de durata relativa de cuplare a mecanismului considerat.
Parametrii franelor se determina in functie de distanta admisibila de franare. Pentru mecanismele de ridicat cu regim mijlociu de lucru se recomanda , pentru mentinerea sarcinilor in orice pozitie, coeficientul de siguranta la franare kf=l,75, iar pentru cele cu regim greu de lucru kf=2, unde
![]()
Principalele mecanisme ale oricarei masini de ridicat sunt:
a) mecanismul de ridicare, caracterizat prin:
capacitatea de ridicare [![]() ] ; inaltimea de ridicare (sau de coborare)
] ; inaltimea de ridicare (sau de coborare)
[m] si viteza de ridicare (coborare) a sarcinii [m/min] ;
b) mecanismul de deplasare, caracterizat prin viteza de deplasare [m/min] ;
c) mecanismul de rotire, caracterizat prin turatie [rot/min] ;
d) mecanismul pentru schimbarea razei de actiune a bratului, caracterizat prin timpul necesar [s], pentru ca sa se treaca de la raza minima la raza maxima de actiune.
UTILAJE DE RIDICAT CU TREI MISCARI
1. MACARALE TURN
1.1. Generalitati. Clasificari.
Macaralele tun sunt constructii metalice din grinzi cu zabrele, cu sectiunea patrata sau dreptunghiulara, care se reazema in cele patru colturi pe rotile mecanismului de deplasare. Uneori partea inferioara a turnului este un portal, in interiorul caruia sunt asezate liniile de cale ferata pe care vin vagoanele platforma incarcate cu materiale.Aceste utilaje s-au impus in lucrarile de constructii ca urmare a unor avantaje deosebite cum ar fi viteza de ridicare si de coborare a sarcinii poate fi variata in limitele dorite la ridicarea, respectiv la asezarea sarcinii pe locul de montaj; au mecanism de deplasare simplu (carucior pe roti); au raza de actiune mare, inaltime de ridicare mare si capacitate de ridicare mare; pot fi comandate de la distanta; au dispozitive automate de prindere; etc.
Macaralele turn au o raza de actiune variabila si se folosesc pe santierele de constructii industriale sau civile la constructia furnalelor, a cladirilor din elemente prefabricate, la manipularea materialelor in depozite si pe cheiuri, la montarea constructiilor hidrotehnice, etc.
Variatia razei de actiune se obtine fie prin inclinarea bratului, fie prin deplasarea pe bratul orizontal a unui carucior port-carlig(fig.l).
Fig.1.
Macaralele turn se manevreaza dintr-o cabina situata la partea superioara sau de mijloc a turnului, sunt actionate electric (cand macaraua se deplaseaza pe distante mari, atunci motoarele sunt alimentate cu energie electrica printr-un cablu flexibil racordat la reteau de forta) si cu patru mecanisme: mecanismul de ridicare si coborare a sarcinii, mecanismele de variatie a razei de actiune, de rotire si deplasare a macaralei (primele trei se monteaza pe turn si pe brat, iar al patrulea pe carucioarele mecanismului de deplasare).
Din punct de vedere constructiv, macaralele turn pot fi cu un turn fix si cap rotitor, cu platforma rotitoare si cu turn rotitor (cu coloana rotitoare), iar dupa destinatie se clasifica in macarale turn pentru constructii civile si industriale pana in patru etaje, pentru constructii peste patru etaje (pana la 14 etaje), macarale turn autoridicatoare pentru constructii inalte (>14 etaje), macarale pentru constructii hidrotehnice, etc.
Primele doua grupe cuprind macarale care se deplaseaza pe sine si au o capacitate de ridicare pana la 5 tf. Cele din grupa a treia se fixeaza direct pe cladirea in constructie si se deplaseaza in inaltime cu mijloace proprii, pe masura inaltarii cladirii, iar cele din grupa a patra cu raza de actiune si capacitate de ridicare mare (pina la 75 tf).
1.2. Macarale cu turn fix si cap rotitor.
Acestea se compun din turn si capul rotitor de care
se prinde articulat un brat si o consola pe
care se monteaza o contragreutate.
Turnul este fixat pe o platforma, care este sustinuta de roti de rulare si se poate deplasa pe
sine cu ajutorul unui mecanism de
deplasare; pe platforma se incarca un balast care
mareste stabilitatea macaralei. Rotirea capului (turelei) se realizeaza cu un mecanism de rotire. La partea inferioara 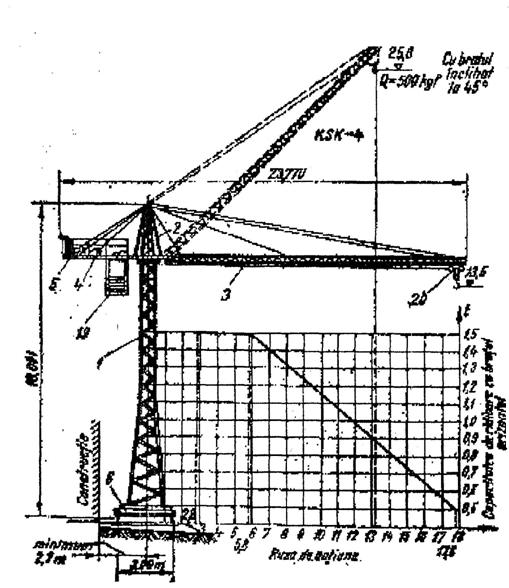 turela se reazema pe role fixate de turn.
turela se reazema pe role fixate de turn.
Fig 2
Bratul este inclinat si mentinut in pozitie de lucru printr-un palan de ridicare al carui cablu se infasoara pe tamburul unui troliu. Sarcina este ridicata si coborata cu ajutorul palanului de ridicare, al carui cablu se infasoara pe tamburul troliului de sarcina. De platforma este fixata cabina macaragiului, iar la unele tipuri pe brat se poate deplasa un carucior mobil cu sarcina.
Acest tip de macarale au o serie de dezavantaje cum ar fi constructie complicata a turnului, stabilitate redusa, montaj si transport destul de greu datorita capului rotitor si a consolei pentru contragreutate.
1. Macarale cu platforma rotitoare.
Acestea se utilizeaza la ridicarea sarcinilor in cazul constructiilor mixte (din prefabricate si materiale traditionale), in special in cazul constructiilor « fagure », la care greutatea panourilor poate ajunge pana la 1,7÷1,8 tf. La aceste tipuri platforma 6 este rotitoare, ea rezemandu-se pe mecanismul de deplasare printr-un lagar special cu role sau cu bile. Mecanismul de deplasare este alcatuit din patru roti sau patru boghiuri cu cate doua roti. Aceste tipuri de macarale sunt prevazute cu mecanisme pentru deplasarea pe sine, pentru rotirea platformei, ridicarea si coborarea sarcinii, oscilarea bratului si automontarea macaralei.
Mecanismele sunt actionate cu motoare electrice individuale asincrone trifazate, iar troliul de ridicare a sarcinii are doua viteze pentru ridicare si alta redusa, pentru montarea panourilor pe reazeme. Au avantajul unei mai bune stabilitati deoarece mecanismele si contragreutatea (balastarea) sunt plasate pe platforma rotitoare (deci la partea inferioara a turnului), iar pe de alta parte, lipseste capul rotitor si consola cu contragreutate (4 si 5 din fig.2), astfel ca centrul de greutate al constructiei si punctul de aplicare a sarcinilor datorite actiunii vantului sunt mult mai aproape de suprafata de reazem a macaralei.
MACARALE CAPRA, PORTAL SI PODURI TRANSBORDOARE.
Aceste macarale sunt alcatuite dintr-o constructie metalica formata dintr-o grinda orizontala si doua picioare de sprijin, in functie de dimensiunile carora se clasifica in macarale portal, la care lungimea grinzii orizontale in raport cu inaltimea picioarelor este mai redusa, macarale capra la care lungimea grinzii orizontale este mai mare decat a picioarelor si poduri transbordoare care au deschideri peste 24 m si capacitati de ridicare peste 10 tf.
In fig.3 este dat un exemplu de macara capra folosita pentru lucrari de montaj si pentru lucru in depozite. Podul 1 este o grinda cu zabrele de sectiune triunghiulara cu varful in jos, care are la talpa inferioara un profil de otel « I » pe care ruleaza electro-planul 8. Podul se sprijina pe doua perechi de picioare 2 (de forma unor grinzi triunghiulare) care reazema, prin intermediul unor articulatii sferice, pe patru carucioare de rulare 3 si 4 cu cate patru roti fiecare. Carucioarele 3 sunt motoare, iar carucioarele 4 sunt conduse. Picioarele sunt legate intre ele prin grinda tirant 5.
Macaraua se deplaseaza pe doua cai ferate
inguste cu ecartamentul de cca 600 mm, iar deplasarea
sincrona a celor doua
carucioare motoare se realizeaza pe principiul arborelui
electric. Comenzile se executa
din cabina 6 amplasata pe unul din
picioarele macaralei pe care este montata si scara de acces 7.
Datorita legaturii prin articulatii sferice a carucioarelor
de rulare, macaraua poate fi:
mutata, fara demontare, pe o cale de rulare asezata la 90° sau pe o cale de rulare
paralela, folosind o cale provizorie de transbordare perpendiculara
pe ambele cai de rulare.
Macaralele capra au avantajul unei capacitati constante de ridicare, al unor constructii simple cu un cost redus si al unei executii cu mijloace relativ simple.
Dezavantajul lor consta in faptul ca au o inaltime si viteza de ridicare a sarcinii relativ mici, prezinta dificultati la reglarea vitezei la montarea constructiilor din prefabricate si consuma multa energie la deplasarea macaralei.
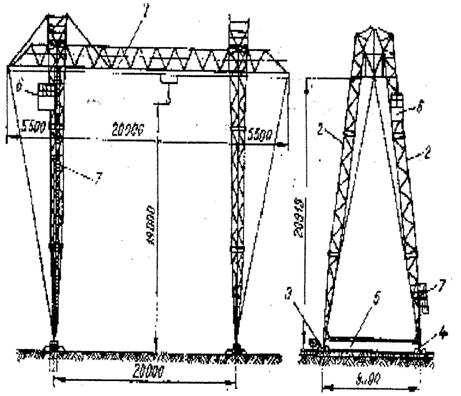
Fig .
![]() AUTOMACARALE.
AUTOMACARALE.
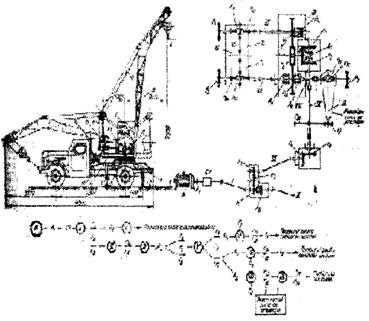
Automacaralele sunt macarale cu platforma rotitoare si brat oscilant, montate pe sasiuri obisnuite de autocamioane. Ele sunt echipate cu limitatoare de sarcina, de cursa si de oscilare a bratului si se construiesc pentru sarcini de l,5tf÷10tf. Mecanismele lor pot fi actionate fie de motorul autovehiculului, fie de motoare electrice individuale montate pe platforma rotitoare si alimentate de la un generator electric actionat de motorul autocamionului sau, in cazul macaralelor care functioneaza mai mult timp in acelasi loc, de la o retea electrica exterioara. Unele tipuri au mecanismele de ridicare sau cele de ridicare si oscilare a bratului actionate hidraulic. Acestea din urma au o utilizare larga datorita avantajelor actionarii hidraulice, cum ar fi: constructie compacta, greutate proprie unica, transmisie simpla, variatie lina a vitezelor in limite mari, comenzi simple, rezistenta mare la uzura si siguranta in caz de suprasarcini. Automacaralele au urmatoarele miscari de lucru : ridicarea si coborarea sarcinii, oscilarea bratului, rotirea platformei cu bratul si, uneori deplasarea cu sarcina in carlig. Comenzile se transmit fie din cabina soferului, fie dintr-o cabina montata pe platforma rotitoare. Unele constructii au bratul telescopic, astfel ca raza de actiune poate fi variata atat prin oscilarea bratului, cat si prin variatia lungimii lui.
Automacaralele se folosesc la incarcarea si descarcarea materialelor de constructie, a elementelor prefabricate si a utilajelor pe santiere, in depozite, in gari, la lucrari de montaj, etc. Ele prezinta avantajul unei viteze de deplasare mare si dezavantajele ca se deplaseaza numai pe drumuri amenajate fara denivelari (pentru a nu periclita stabilitatea masinii) si folosesc obligatoriu, in timpul lucrului, reazeme suplimentare (calaje), care servesc la descarcarea suspensiei masinii si la marirea suprafetei de sprijin, deoarece stabilitatea lor in directia perpendiculara pe directia de mers este mai mica.
4. CALCULUL MECANISMELOR
MACARALELOR.
4.1. Mecanismul de ridicare.
In fig.4 se prezinta schema de principiu a unui mecanism de ridicare. In principiu mecanismul de ridicare asigura ridicarea sarcinii cu viteza necesara la inaltimea si pozitia dorita, oprirea sarcinii in orice moment al ridicarii sau coborarii si coborarea sarcinii cu viteza ceruta. El actioneaza cu intermitenta, iar cursa activa (ridicarea sarcinii) are trei faze: accelerarea (demarajul), regimul permanent si oprirea (franarea). Pentru perioada de accelerare si de franare sunt valabile relatiile:
![]() , (3)
, (3)
respectiv,
![]() ,
,
unde Ms, Mt, Mr, Mf, Mm sunt momentele rezistente, reduse la arborele motor, datorita fortelor statice, fortelor de inertie ale maselor in miscare de translatie, fortelor de inertie ale maselor in miscare de rotatie, fortelor de frecare care actioneaza la periferia tamburului de frana si respectiv momentul activ (cuplul motor).
Vom avea:
![]() , (5)
, (5)
unde
Q - sarcina de ridicat;
Gs - greutatea dispozitivelor de prindere a sarcinii;
![]() , (6)
, (6)
![]() - randamentele
transmisiei pana la arborele de ordinul «j » (socotind de la arborele
motor), palanului si al reductorului;
- randamentele
transmisiei pana la arborele de ordinul «j » (socotind de la arborele
motor), palanului si al reductorului;
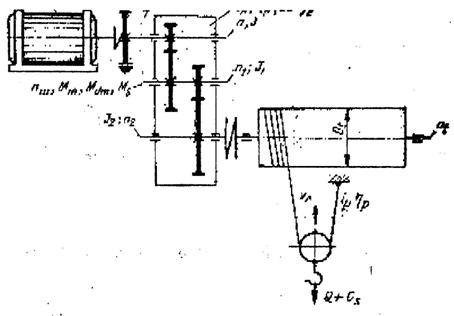
Fig.4.
![]() (7)
(7)
![]() - rapoartele de transmitere totale, pana la arborele de ordinul 'j', al palanului
si al reductorului;
- rapoartele de transmitere totale, pana la arborele de ordinul 'j', al palanului
si al reductorului;
Fie:
![]() (8)
(8)
unde nt este turatia tamburului troliului de ridicare, si fie
![]()
Viteza de ridicare a sarcinii.
Mai avem ca ![]() , (10)
, (10)
Unde ![]() este turatia
arborelui motor.
este turatia
arborelui motor.
Inlocuind relatiile (9) , (8) si (10) in (5) , rezulta:
![]() (11)
(11)
Momentul de forte de inertie al maselor de translatie va fi:
![]() (12)
(12)
unde:
![]() - timpul de accelerare;
- timpul de accelerare;
g - acceleratia
gravitationala (g 9,81 m/![]() )
)
Din (9) si (8) rezulta :
![]() (13)
(13)
Inlocuind (13) si (10) in (12) , rezulta:
![]() (14)
(14)
Momentul fortelor de inertie ale maselor in miscare de rotatie va fi :
![]() , (15)
, (15)
unde:
![]() (16)
(16)
 (17)
(17)
![]() - masa corpului care se roteste
- masa corpului care se roteste
![]() - raza de giratie a corpului considerat;
- raza de giratie a corpului considerat;
![]() - modulul de elasticitate transversala al corpului
considerat.
- modulul de elasticitate transversala al corpului
considerat.
Inlocuind (16) si (17) in (15) , rezulta:

sau introducand momentul de giratie echivalent:
deoarece  , rezulta :
, rezulta :
![]() (18)
(18)
deoarece ![]() , rezulta ca cu cat raportul de
, rezulta ca cu cat raportul de
transmitere dintre arborele motor si arborele pe care se gaseste piesa considerata este mai mare cu atat momentul de giratie al acesteia redus la arborele motor este mai mic.
Pentru simplificarea calculelor se obisnuieste sa se ia
![]() (19)
(19)
adica se inmulteste momentul de giratie al pieselor de pe arborele motor cu un coeficient k>l, tinandu-se astfel seama de influenta maselor in rotatie ale organelor care compun lantul cinematic al mecanismului.
Inlocuind relatiile (11), (14) si (18) in (3), rezulta momentul activ (din perioada de demaraj):
 (20)
(20)
Procesul de franare este similar cu procesul de demaraj, cu observatia ca in formula (2) randamentele vor intra la numarator, adica:
 (21)
(21)
unde ![]() este timpul de
franare, iar semnul + sau - se refera la coborarea, respectiv ridicarea
sarcinii.
este timpul de
franare, iar semnul + sau - se refera la coborarea, respectiv ridicarea
sarcinii.
Raportul
![]() dintre momentul de
franare efectiv
dintre momentul de
franare efectiv ![]() , creat de frana si momentul static dat de sarcina
maxima redus la arborele franei, se numeste coeficient de
siguranta la franare.
, creat de frana si momentul static dat de sarcina
maxima redus la arborele franei, se numeste coeficient de
siguranta la franare.
Timpii de franare si
accelerare pot rezulta din (21) sau (20), daca se cunosc ![]() si
si ![]() .
.
Raportul ![]() dintre momentele
dintre momentele ![]() de demaraj si
momentul din perioada de regim se numeste coeficient de
supraincarcare a motorului. Puterea nominala a motorului de
actionare se poate alege si pe baza momentului static
de demaraj si
momentul din perioada de regim se numeste coeficient de
supraincarcare a motorului. Puterea nominala a motorului de
actionare se poate alege si pe baza momentului static ![]() si se
verifica apoi daca aceste motoare au coeficientul
si se
verifica apoi daca aceste motoare au coeficientul ![]() maxim suficient de mare pentru a asigura momentul
necesar in perioada de pornire
(demaraj).
maxim suficient de mare pentru a asigura momentul
necesar in perioada de pornire
(demaraj).
Reducerea ta si ![]() duce la
micsorarea duratei ciclului de lucru, dar
daca se exagereaza atunci se maresc fortele de
inertie, ceea ce se traduce prin aparitia socurilor puternice in
mecanisme si in constructia metalica (nu trebuie sa depaseasca,
respectiv sa scada sub
l,5-2s).
duce la
micsorarea duratei ciclului de lucru, dar
daca se exagereaza atunci se maresc fortele de
inertie, ceea ce se traduce prin aparitia socurilor puternice in
mecanisme si in constructia metalica (nu trebuie sa depaseasca,
respectiv sa scada sub
l,5-2s).
4.2. MECANISMUL DE ROTIRE.
Rezistenta la rotire a macaralelor rotitoare depinde de felul macaralei, de calitatea reazemelor de sprijin a partii rotitoare, de momentul datorit fortelor tangentiale de inertie care actineaza asupra maselor in rotatie si de marimea suprafortelor batute de vant la macaralele care lucreaza in aer liber. Fie schema din fig.5 a mecanismului de rotire al unei macarale cu coloana rotitoare.
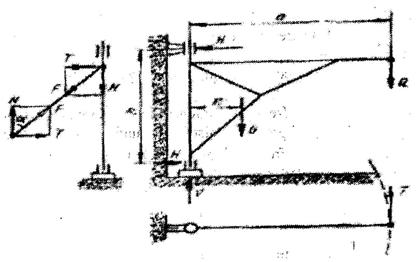
Fig.5
Aceste macarale in timpul lucrului sunt actionate in
plan orizontal de momentul activ de rotire ![]() , datorita fortei exterioare
T care actioneaza la bratul de lungime a, caruia i se opun momentele rezistente datorate frecarilor
de alunecare (din lagarele inferior si superior) si de pivotare
(din lagarul inferior). Se
neglijeaza fortele tangentiale de inertie. Fie ecuatia de momente in raport cu A:
, datorita fortei exterioare
T care actioneaza la bratul de lungime a, caruia i se opun momentele rezistente datorate frecarilor
de alunecare (din lagarele inferior si superior) si de pivotare
(din lagarul inferior). Se
neglijeaza fortele tangentiale de inertie. Fie ecuatia de momente in raport cu A:
![]()
de unde:
![]()
![]() (
(
Momentul rezistent datorita frecarii de alunecare din lagarele 2 si 3 este:
![]()
unde:
![]() - coeficientul de frecare de alunecare intre arbore
(coloana) si lagar;
- coeficientul de frecare de alunecare intre arbore
(coloana) si lagar;
r - raza fusurilor coloanei rotitoare (in general fusurile au aceeasi raza).
Fie ![]() coeficientul de
frecare de alunecare intre arbore si lagarul 3 (fig.5 si 6) si
coeficientul de
frecare de alunecare intre arbore si lagarul 3 (fig.5 si 6) si ![]() presiunea
distribuita uniform pe suprafata de rezemare. Forta de frecare elementara
presiunea
distribuita uniform pe suprafata de rezemare. Forta de frecare elementara ![]() tangenta la un
cerc de raza
tangenta la un
cerc de raza ![]() va fi:
va fi:
![]()
iMomentul de frecare de pivotare va fi:
 (26)
(26)
Fie V forta axiala din lagarul interior 3 . Rezulta presiunea
![]() (27)
(27)
Inlocuind (27) in (26) rezulta momentul de frecare de pivatate:
![]() (28)
(28)
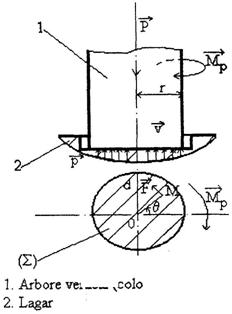
Fig 6
Formula (28) a fost dedusa in baza unor ipoteze simplificatoare cu privire la constanta presiunii p si la
constanta coeficientului de frecare,
ceea ce in practica este mai putin realizabil. Oricum formula se poate utiliza, in locul coeficientului de frecare ![]() introducandu-se o
valoare medie, care se determina experimental. La echilibru obtinem ecuatia (cu
relatiile 24 si 28).
introducandu-se o
valoare medie, care se determina experimental. La echilibru obtinem ecuatia (cu
relatiile 24 si 28).
![]() (29)
(29)
sau , cu (23),
![]() (30)
(30)
de unde :
![]() (31)
(31)
Fie ![]() forta din cablul
de actionare inclinata cu unghiul α fata de verticala
(fig.5)
forta din cablul
de actionare inclinata cu unghiul α fata de verticala
(fig.5)
Vom avea:
![]()
sau cu (31),
![]() (32)
(32)
5. CALCULUL STABILITATII MACARALELOR.
Macaralele deplasabile si cu rotatie completa sunt masini a caror stabilitate la rasturnare este asigurata numai de greutatea lor proprie. Sarcinile exterioare sunt aplicate in afara perimetrului de sprijin asa ca acestea creeaza momente de rasturnare fata de acest perimetru. Cum centrul de greutate al macaralei se gaseste in interiorul acestui perimetru, greutatea ei proprie creeaza un moment de stabilitate in raport cu perimetrul de sprijin.
Gradul de stabilitate a macaralei este definit astfel de raportul dintre momentul de stabilitate si cel de rasturnare. Cele doua momente variaza in raport cu inclinarea si pozitia bratului. Din acest motiv stabilitatea macaralei trebuie asigurata pentru toate pozitiile si combinatiile posibile ale fortelor exterioare (sarcina de ridicat si greutatea dispozitivelor de apucare; fortele de inertie ce apar in regim variat la coborarea sarcinii, la franarea ei sau la miscarea pe orizontala a macaralei; presiunea vantului asupra sarcinii si a macaralei si forta centrifuga ce apare la rotirea partii rotitoare a macaralei).
La determinarea stabilitatii se considera cele doua situatii caracteristice: stabilitatea macaralei cu sarcina si fara sarcina. Cum elementele de calcul nu pot fi absolut exacte, stabilitatea trebuie calculata cu un coeficient de sigranta, chiar se tine seama de toti factorii care o influenteaza.
Pentru echilibru trebuie ca
![]() (33)
(33)
unde:
![]() - momentul de stabilitate generat de greutatea proprie a macaralei (exclusiv greutatile bratului
si sarcinii);
- momentul de stabilitate generat de greutatea proprie a macaralei (exclusiv greutatile bratului
si sarcinii);
![]() momentul de rasturnare generat de fortele exterioare statice
(greutatile bratului, sarcinii, dispozitivelor de prindere, palanului de ridicare a sarcinii, etc.)
si de inertie;
momentul de rasturnare generat de fortele exterioare statice
(greutatile bratului, sarcinii, dispozitivelor de prindere, palanului de ridicare a sarcinii, etc.)
si de inertie;
![]() - momentul suplimentar de rasturnare, echilibrat de o contragreutate.
- momentul suplimentar de rasturnare, echilibrat de o contragreutate.
![]() este o parte din momentul creat de capacitate
nominala maxima de ridicare a
macaralei in raport cu axa de rotatie a macaralei,
adica:
este o parte din momentul creat de capacitate
nominala maxima de ridicare a
macaralei in raport cu axa de rotatie a macaralei,
adica:
![]()
unde:
![]() - capacitatea nominala
maxima de ridicare a macaralei;
- capacitatea nominala
maxima de ridicare a macaralei;
r - raza de actiune a macaralei, corespunzatoare sarcinii Qmax,
masurata fata de axa de rotatie;
K - coeficientul de siguranta la stabilitate.
Cele patru miscari (ridicarea - coborarea sarcinii, ridicarea sau coborarea bratului, rotirea si deplasarea macaralei) ale macaralelor cu brat cu rotatie completa nu se executa niciodata concomitent. Pentru calcule curente se admite ca fortele care actioneaza concomitent, care apar in doua din cele patru miscari posibile, sarcina datorita vantului si greutatea sarcinii.
Fie, de exemplu, cazul in care macaraua, cu sarcina in carlig si cu bratul perpendicular pe directia de deplasare (a macaralei), lucreaza pe o platforma inclinata, este supusa actiunii vantului si se roteste (fig.7).
Coeficientul de siguranta la stabilitate, in acest caz, va fi dat de relatia:
![]()
unde:
![]() -
momentul sarcinii Q;
-
momentul sarcinii Q;
![]() - momentul
fortelor de inertie verticale;
- momentul
fortelor de inertie verticale;
Mat - momentul fortelor de inertie orizontale;
Mv -- momentul dat de actiunea vantului corespunzatoare
perioadei de lucru.
In fig.7 s-au folosit notatiile:
![]() - greutatea tuturor pieselor macaralei situate in interiorul
- greutatea tuturor pieselor macaralei situate in interiorul
suprafetei de sprijin;
![]() - greutatea tuturor pieselor macaralei situate in afara
- greutatea tuturor pieselor macaralei situate in afara
perimetrului de sprijin;
![]() - rezultanta presiunii
vantului asupra macaralei;
- rezultanta presiunii
vantului asupra macaralei;
![]() - rezultanta presiunii
vantului asupra sarcinii.
- rezultanta presiunii
vantului asupra sarcinii.
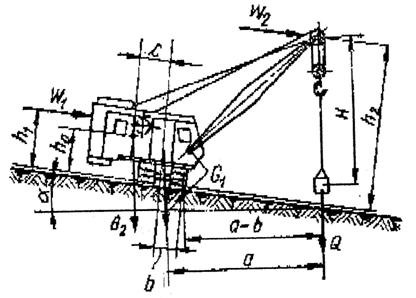
Fig.7
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |