
TRANSMISIA LONGITUDINALA, PROPULSIA SI MECANISMUL DE DEPLASARE
Masinile de constructii se echipeaza cu mecanisme de deplasare de tipul pe roti (metalice, cu jante cu pneuri, de cale ferata, cu jante cu cauciucuri pline), cu senile, cu roti si senile si cu echipamente schimbatoare.
1. MECANISMELE DE DEPLASARE CU ROTI
1.1. Mecanismul de deplasare pe roti cu pneuri
Acesta poate fi alcatuit: dintr-un sasiu de autocamion (cazul masinilor sub 7 tf), dintr-un sasiu special cu suspensie elastica (cazul masinilor sub 15 tf) sau cu suspensie rigida (cazul masinilor grele), sau dintr-un sasiu de constructie speciala (cazul masinilor foarte grele) si, in toate cazurile, din aparatele de rulare respective.
Miscarea pentru deplasare poate fi preluata de la motorul masinii sau de la un motor special montat pe sasiu. Cu astfel de mecanisme sunt dotate, de exemplu, automacaralele, excavatoarele universale, excavatoarele auto etc.
1.2. Mecanismul de deplasare pe roti de cale ferata
Acesta este alcatuit, in principiu, in cazul masinilor pana la 10 tf, dintr-o platforma montata pe doua osii echipate cu roti de cale ferata cu diametrul de 300-400 mm. In fig. se da schema cinematica a transmiterii miscarii de la motorul masinii la rotile motoare, in cazul macaralelor autopropulsate.
Transmiterea miscarii de la motor la rotile motoare 5 se face prin lanturile 1 cu role sau cu role si bucse si o serie de rotii dintate 2, pentru lant, montate pe osia transversala 3 si osiile motoare 4. Masinile grele, macaralele si excavatoarele se monteaza pe platforme sau pe boghiuri (de cale ferata).
Conditia ca aceste masini grele sa circule in garniturile de cale ferata este ca organele transmisiei mecanismului de deplasare (lanturile si rotile dintate) sa fie demontabile. Pentru transport se scot vinciurile laterale de sprijin si dupa demontare, masina propriu-zisa si echipamentul de lucru se incarca pe doua platforme de cale ferata, iar inferior se coboara pe osiile proprii si se introduce in garnitura convoiului.
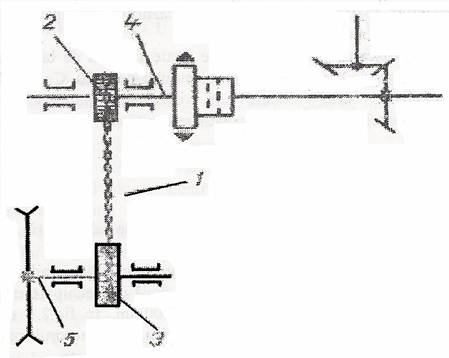
Fig.
2. MECANISMUL DE DEPLASARE PE SENILE
Zalele sau elementele de senile sunt articulate intre ele prin bolturi de senila, asa incat formeaza un lant inchis, forma zalelor depinzand de performantele cerute mecanismului de deplasare. Senilele se clasifica, dupa forma caii de rulare a elementului de senila, dupa modul de rulare al rotilor purtatoare pe senila si dupa felul cum se face angrenarea cu roata motoare. Se compun din zale, bolturile de articulatie si dispozitivele de asigurare a bolturilor. Rotile purtatoare se monteaza pe lagare (cu rulmenti conici sau cu bucse de bronz) etansate prin labirinte si simeringuri si sunt sustinute de niste axe fixe de lanjeroanele masinii. Forma acestor roti este strans legata de forma zalei (fig. 2.5); rotile de sustinere (rulourile) sunt similare cu rotile purtatoare, insa mai slab dimensionate.
Fig. 2.5.
Rotile motoare 1 sunt roti dintate sau roti cu alveole, montate in spate si primesc miscarea de la motor, pe care o transmit mai departe senilelor, cu care angreneaza in permanenta, contribuind astfel la deplasarea autovehiculului. Pasul rotii reprezinta (in cazul autotractoarelor cu viteza mare) dublul pasului senilei. Rotile de intindere 2 se monteaza in fata (fig. 2.6.) si au rolul de a sustine si de a ghida senilele. Ca forma sunt analoage cu rotile de sustinere.
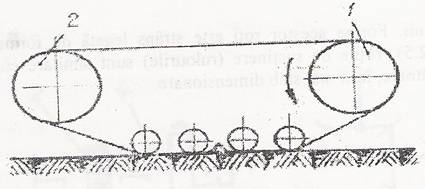
Fig. 2.6.
Rolele purtatoare au diametrul mai mic decat cel al rotilor motoare sau de intindere. Senilele cu role purtatoare sunt acelea la care raportul dintre numarul zalelor aplicate pe sol si numarul rolelor purtatoare care reazema pe ele este mai mic decat 2 (in aceasta situatie placile dintre role nu se inclina, asigurand o presiune uniforma sub senila si sub role - fig. 2.7.), iar senilele cu roti purtatoare sunt acelea la care raportul mentionat este mai mare decat 2; in acest ultim caz, placile se inclina usor, formand o linie ondulata, din care cuaza apar diferente mari intre presiunea de sub rotile purtatoare si de sub rotile de sustinere (fig. 2.8.).
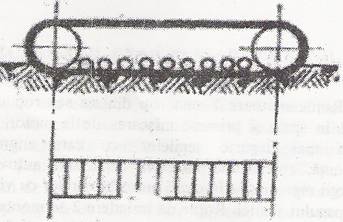
Fig. 2.7.
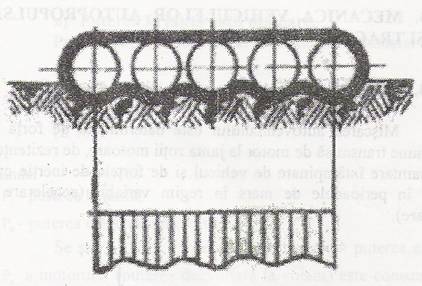
Fig. 2.8.
Senilele cu role purtatoare se recomanda la masinile care lucreaza in terenuri usoare si mijlocii sau la masinile la care senilele nu sunt solicitate la sarcini exterioare mari; senilele cu roti purtatoare se recomanda la masinile destinate a lucra in terenuri cu piatra sau stancoase.
Din punct de vedere al schemelor constructive, mecanismele de deplasare cu senile se pot grupa in mecanisme cu doua senile (cele mai des folosite) si mecanisme cu trei sau mai multe senile.
Pentru decuplarea senilelor, la viraje, constructia tipica in cazul transmisiei cu lant este aceea cu ambreaje cu gheara (fig. 2.9).
Pe axul intermediar 2, care primeste miscare de la motor prin angrenajul de unghi 9, culiseaza pe caneluri piesa 8, care poate angrena cu piesa 7 montata fix pe arborele 1, pe care se gaseste montata roata dintata 3, care transmite mai departe miscarea, prin transmisia 6, la roata motoare 4.
3. MECANICA VEHICULELOR AUTOPROPULSATE TRACTATE PE ROTI
3.1. Definirea parametrilor mecanici
Miscarea autovehicului este determinata de forta de tractiune transmisa de motor la janta rotii motoare, de rezistentele la inaintare intampinate de vehicul si de fortele de inertie care apar in perioada de mers in regim variabil (accelerarea si franarea).
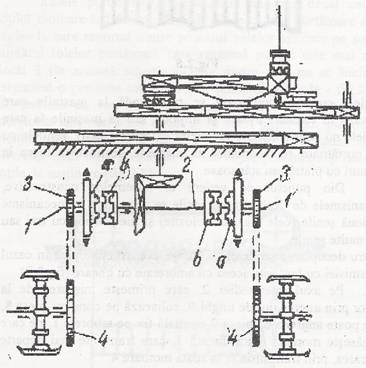
Fig. 2.9.
a) Puterea la janta rotii motoare
Prin definitie, randamentul mecanic al transmisiei este:
![]() , (2.18)
, (2.18)
unde:
Pj - puterea la janta;
Pe - puterea efectiva a motorului.
Se stie ca Pj < Pe pentru ca o parte din puterea efectiva Pe a motorului (puterea dezvoltata la volant) este consumata in lungul transmisiei prin frecari in angrenaje, in lagare si in trepidatii ale organelor de transmitere a miscarii.
Rezulta elementar din (2.18) ca puterea la janta motoare este:
Pj = hn Pe (2.18')
Pentru autovehicule de tipul autocamioanelor, h m = 0,7
b) Momentul la janta rotii motoare
Momentul la janta rotii motoare este momentul corespunzator puterii la janta Pj , dezvoltata la periferia rotilor motoare, dat de relatia:
![]() , (2.19)
, (2.19)
unde:
wj - viteza unghiulara a rotii motoare;
nj - turatia rotii motoare.
Puterea efectiva Pe se poate scrie, deasemeni, sub forma:
![]() (2.19')
(2.19')
unde:
wm - viteza unghiulara a arborelui motor;
nm - turatia motorului;
Me - momentul motor la volant
Inlocuind (2.19) si (2.19') in (2.18), rezulta:
![]() (2.20)
(2.20)
Fie,
![]() (2.21)
(2.21)
raportul de transmitere a turatiei motorului in lungul organelor de transmitere a miscarii; el este elag cu produsul rapoartelor de transmitere partiale din angrenajul de unghi, schimbatorul de viteze si din alte organe de transmitere a miscarii. Inlocuind (2.21) in (2.20), rezulta:
Mj = hm i Me (2.22)
c) Forta de tractiune si forta la janta
Forta de tractiune E este forta orizintala aplicata in centrul rotii care produce impingerea vehicului (fig. 2.10), iar forta la janta Fj este forta tengentiala de la periferia rotii motoare corespunzatoare momentului la janta Mj (fig. 2.10).
Daca deplasarea autovehiculelor se face fara ca rotile sa patineze, atunci intreaga putere la janta Pj este consumata pentru impingerea autovehiculelor cu o viteza v, ca si cand ar fi tractat din exterior cu o forta de tractiune Fr, la aceasta viteza.
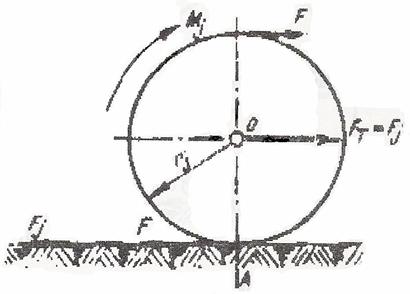
Fig. 2.10
Deci:
Pj = E v0 (2.23)
Cum roata se rostogoleste fara alunecare, centrul instantaneu de rotatie este punctul I (fig. 2.10), astfel ca
v0 = wj rj (2.24)
Inlocuind (2.24) in (2.23), rezulta:
Pj = FT wj rj (2.25)
si cum, pe de alta parte, se poate scrie
Pj = Mj wj (2.26)
Din cele doua relatii (2.25) si (2.26) rezulta:
![]() (2.27)
(2.27)
Mai mult, cum Mj = Fj rj, relatia (2.27) conduce la
 (2.28)
(2.28)
Relatia (2.28) arata ca, in cazul in care rotile nu patineaza, forta de tractiune FT este egala cu forta la janta Fj. Forta de tractiune este o forta orizontala, in cazul deplasarii pe un teren orizontal, care in calcule, se considera ca este aplicata in centrul de masa al vehiculului si ca echilibreaza rezistenta la inaintare a acestuia sau a convoiului (in cazul remorcajului).
d) Aderenta
Forta ![]() este o forta
de aderenta si reprezinta forta de frecare ce apare
intre roata si sol, fiind data de expresia cunoscuta:
este o forta
de aderenta si reprezinta forta de frecare ce apare
intre roata si sol, fiind data de expresia cunoscuta:
![]() (2.29)
(2.29)
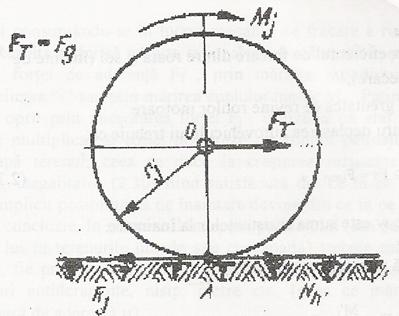
Fig. 2.11
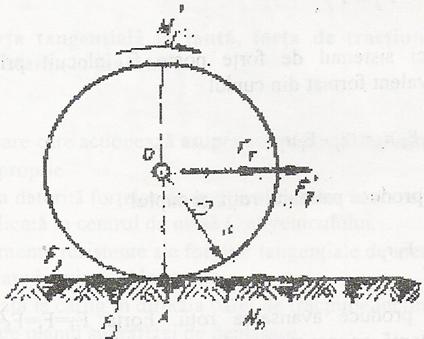
Fig. 2.12
unde:
Ff - coeficientul de frecare dintre roata si sol (inainte de alunecare)
Ga - greutatea ce revine rotilor motoare
Pentru deplasarea autovehiculului trebuie ca:
Ff Fr = Fjmax w (2.30)
unde w este suma rezistentelor la inaintare
Daca admitem ca (fig. 2.12):
si daca
(2.28)
FT = Fj = Ff (2.32)
Atunci sistemul de forte poate fi inlocuit printr-un sistem echivalent format din cuplul
(F T - FT)rj = (F j - Fj)rj (2.33)
care produce patinajul rotii, si cuplul
Fjrj = FTrj (2.34)
care produce avansarea rotii. Forta FT = Fj = Ff = mGa ramane constanta oricare ar fi valoarea fortei la janta Fj dezvoltata de motor. Aceasta arata ca Ff este egala cu forta de frecare (de aderenta) Ff, teoretic autovehiculul incetinand si concomitent patinand, surplusul de forta la janta dezvoltat peste valoarea aderentei consumandu-se in lucrul mecanic de frecare a rotilor de sol. Rezulta astfel ca nu este rational sa se mareasca Fj peste valoarea fortei de aderenta Ff, prin marirea raportului de demultiplicare "i" sau prin marirea cuplului motor Mc. Patinajul poate fi oprit prin micsorarea fortei Fj, utilizand un etaj mai putin de multiplicat al cutiei de viteze. In timpul patinajului, rotile sapa terenul, ceea ce duce la cresterea rezistentei la inaintare, inegalitatea (2.30) fiind satisfacuta din ce in ce mai greu si implicit posibilitatea de inaintare devine din ce in ce mai mica. In conculzie, in momentul inceperii patinajului (sau pentru evitarea lui in terenurile umede sau cu zapada) trebuie marita aderenta, fie prin incarcarea rotilor motoare, fie prin utilizarea de lanturi antiderapante, nisip, pietre etc. (ceea ce mareste coeficientul de aderenta m
3.2. Mecanica progresiunii masinilor autopropulsate pe roti.
a) Forta tangentiala la janta, forta de tractiune si rezistenta la inaintare.
Fortele exterioare care actioneaza asupra autovehiculului sunt:
G - greutatea proprie
G - rezistenta datorita fortelor de inertie a maselor in translatie si in rotatie aplicata in centrul de masa C al vehiculului.
Me Me - momente rezistente ale fortelor tangentiale de inertie ale maselor aflate in miscare de rotatie;
Zh - forta aplicata la carlig in directia barei de tractiune inclinata unghiul t fata de planul suprafetei de deplasare;
Nv1 , Nv2 - reactiunile solului
Nh1 , Nh2 - reactiunile orizontale ale solului;
Mw1 , Mw2 - momente datorita rezistentei la rulare;
Mf1 , Mf2 - momente rezistente la frecare;
Mj1 , Mj2 - momente la janta partilor directoare, respectiv motoare;
Fj1 , Fj2 - forte la janta.
In continuare neglijam rezistenta aerului, rezistenta datorita fortelor de inertie a maselor motorului aflate in miscare alternativa si rezistenta datorita fortelor tangentiale de inertie a maselor motorului si transmisiei aflate in miscare de rotatie.
Ramane, mai intai, ca:
Wae = Wa = G/g a02 = G/g a, adica rezistenta la accelerarea maselor vehiculului in miscare de translatie redusa la janta rotii motoare.
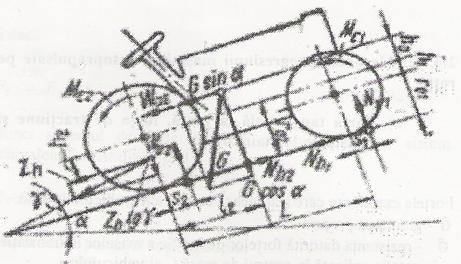
In cazul rotilor directoare, conform fig. 2.13, putem scrie ecuatia de momente:
S M01 = Nh1 r01 - Mf1 - Mz1- Mw1 + Mj1 = 0 (2.35)
iar al celor motoare
S M02 = Nh2 r02 - Mj2 + Mz2 + Mw1 + Mf2 = 0 (2.36)
Fie ecuatia de proiectie a fortelor pe planul cai de rulare (plan inclinat in <a fata de orizontala)
Zh + Wa + Nh1 + Gsina - Nh2 = 0 (2.37)
In cazul rotilor directoare, inaintarea ei se datoreste fortei de impingere, astfel ca in ecuatia (2.35) nu intereseaza momentul la janta (este impropriu) Mj1. In cazul rotilor motoare, momentul la janta Mj2 este cel care trebuie sa echilibreze momentul datorat reactiunii orizontale a solului, rezistenta la rulare si momentul rezistent datorita fortelor tangentiale de inertie (in ecuatia 2.36 nu mai apare Mf2). Extragand din (2.36) si inlocuind in (2.37), rezulta
![]()
(2.38)
sau
![]()
(2.39)
unde
Fj2 - forta tangentiala la janta rotii motoare sau forta de tractiune (Fj2 = FT);
![]()
este suma rezistentelor la mers
a rotilor motoare, in care este inclusa si influenta
rotilor tangentiale de inertie.
Sa extragem acum Mj2 din ecuatia (2.38)
Mj2 = Zhr02 + Nh1r02 + Gr02sin a + Me + Mw2 + War02, (2.38
Nh1r02 este rezistenta la mers a rotilor directoare redusa la roata motoare;
Me + Mw2 = w r02 este momentul corespunzator rezistentei la mers a rotilor motoare.
In sfarsit extragand din (2.35) reactiunea Nh1 si introducand-o in ) rezulta momentul la janta Mj2 sub forma:
![]()
Fj2 = Zh + W, (2.41)
unde
![]()
si reprezinta
rezistenta totala la mers a autovehiculului pe teren orizontal.
Daca se neglijeaza frecarile din lagarele rotilor directoare, in relatia (2.40) se face Mf1 = 0
b) Determinarea reactiunilor solului
Ele rezulta scriind ecuatii de momente ale fortelor, care actioneaza asupra vehiculului, in raport cu punctele A1 si respectiv A2. De data aceasta se considera toate fortele care actioneaza asupra vehiculului.
Fie ecuatia de momente in raport cu punctul A2:
G (cosa)l2 - G (sina)(h0-r02)-Wa(h0+r02)-Zh(r02-h2)-Nvs2-Nv1(L+s1)-Me (2.42)
Fie:
Nv1s1 = Mw1 (2.43)
Nv2s2 = Mw2 (2.44)
unde s1,s2 sunt coeficientii de frecare, de rostogolire. Inlocuind (2.43) si (2.44) in (2.42), rezulta reactiunea normala:

sau cu (2.38
![]()
(2.45)
Conform figurii (2.13) r02 = r01+h1, astfel ca (2.45) devine:

(2.45
![]()
![]()
(2.45
Din nou, cu (2.35), si cu Mf1 = 0 (daca neglijam frecarile din lagare), obtinem:

(2.46)
Fie acum ecuatia de protectie a tuturor fortelor pe normala la suprafata caii de rulare:
Nv1+Nv2-Zhtg t- Gcosa (2.47)
De unde:
Nv2 = Zhtg t- Gcosa -Nv1 (2.48)
Inlocuind Nv1, data de (2.46), in (2.48), rezulta reactiunea normala

(2.49)
4. MECANICA MASINILOR AUTOPROPULSATE PE SENILE
4.1. Sistemul de propulsie.
Sistemul de propulsie se compune, in cazul masinilor pe senile, din senile, roti motoare, rotile de intindere, rotile purtatoare (galetii), rotile de sustinere a senilei (rulourire), dispozitivele de intindere ale senilei, suspensia si organele de legatura.
4.2. Consideratiuni cinematice si dinamice specifice.
a. Profilul si forma senilei.
Teoretic, roata motoare si roata de intindere trebuie sa se gaseasca la o inaltime oarecare fata de sol, cand vehiculul se deplaseaza pe teren orizontal, pentru a nu exista momente cand osiile pe care se monteaza aceste roti sa fie complet descarcate si deci suspensia anihilata (atunci cand exista), sa se evite socurile rotilor motoare si directoare la intanlirea obstacolelor frontale si sa se evite miscarea parazita de tangaj, care este cu atat mai pronuntata cu cat pasul elementelor de senila este mai mare: la limita hkmin = rumin (fig. 2.15).

Fig. 2.14
Traiectoria unui punct M de pe senila, pentru o infasurare completa a senilei, este o cicloida, a carei proiectie pe orizontala este egala cu lungimea totala a senilei (ca urmare a miscarii relative de infasurare a senilei si a unei miscari de transport - de translatie rectilinie).
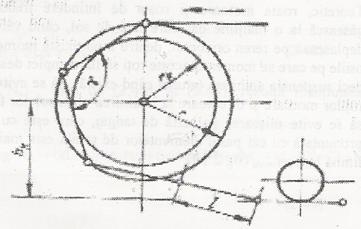
Fig. 2.15
b. Dinamica sistemului de propulsie
Considerand ansamblul fortelor care actioneaza asupra rotii motoare, momentul la janta Mj1 va trebui sa echilibreze momentul rezistent (Tj-T0)r1, corespunzator diferentei de tensiune din benzile senilei (T1 este forta la janta aplicata senilei de catre roata motoare si se opune patinarii senilei pe sol, neglijandu-se inclinarea relativ mica a ramurilor senilei), momentul rezistent Mf1, datorat frecarii senilei la angrenarea ei si frecarii din articulatiile senilei ce se infasoara, redus la janta rotii motoare si momentul rezistent Me , datorat fortelor tangentiale de inertie ale maselor in miscare de rotatie, inclusiv ale elementelor de senila angrenate, adica (fig. 2.14):
Mj1 = (T1-T0)r1+Mf1+ Me
Considerand ansamblul fortelor care actioneaza asupra rotii de intindere, obtinem ca:
(T1-T0)r2 = Mf2+ Me
unde
Mf2 este momentul rezistent ca urmare a frecarilor din lagare si a frecarilor din articulatiile elementelor de senila infasurate pe roata;
Me este momentul rezistent datorat fortelor tangentiale de inertie ale maselor rotii si ale elementelor de senila infasurate pe roata, aflate in miscare de rotatie.
Considerand, acum, ansamblul rotilor purtatoare si portiunea respectiva de senila, avem ca:
Frp = Mfp + Mwp + M ep (2.52)
unde
Mfp este momentul datorat frecarilor din lagarele rotilor purtatoare;
Mwp este momentul datorat rezistentei la rulare a rotilor purtatoare;
M ep este momentul datorat fortelor tangentiale de inertie ale rotilor purtatoare.
Daca se considera portiunea portanta a senilei si fortele respective, obtinem:
Nh = T1-T2-F (2.52
unde:
Nh este reactiunea solului corespunzatoare efortului motor.
Ecuatia bilantului energetic, in cazul masinilor pe senile, va fi:
dLj = dL1 + dL2 + dL3 + dLu (2.53)
unde
dLj = Mj1 w dt, este lucrul mecanic elementar transmis senilei pe roata motoare; (2.54)
dL1 - lucru mecanic elementar rezistent ca urmare a infasurarii senilei pe roti;
dL2 - lucru mecanic elementar pierdut prin alunecari;
dL3 - lucru mecanic elementar necesar deformarii solului;
dLu - lucru mecanic util pentru deplasarea masinii.
Vom avea:
dL1 = (Mf1 + Me w dt + (Mf2 + Me w dt + (Mfp + Mwp + Mep wpdt (2.55)
unde
w r1 = w r2 + wprp (2.56)
daca admitem ca orice alunecare a senilei este nula
si
![]()
Extragand
din (2.56) pe
si inlocuind (2.55), rezulta:

(2.57)
Prima roata purtatoare aplica senila pe sol (fig. 2.16). Din cauza deformarii solului apare reactiunea normala a solului N, care coincide cu directia normalei la portiunea inclinata a senilei (daca trece prin centrul rotii), neglijand astfel componenta dupa directia ramurii de senila.
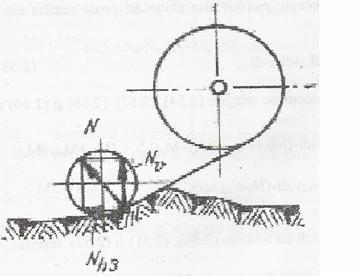
Fig. 2.16
Conform figurii
N = Nv + Nhj (2.58)
Lucrul mecanic necesar deformarii solului va fi:
DLe = Nh3vrdt, (2.59)
Unde vr este viteza reala a masinii.
Rezultanta fortelor aplicate senilei Nh-Nh3 constituie forta de impingere sau forta de tractiune, care se transmite cadrului prin intermediul organelor de legatura dintre osia rotilor motoare si cadru. Lucrul mecanic util de impingere va fi atunci:
DLu = (Nh-Nh3)vrdt (2.60)
Lucrul mecanic pierdut prin alunecari poate rezulta din (2.53)
Astfel:
dL2 = dLj-dL1-dL3-dLu (2.53
unde se inlocuiesc relatiile (2.54), (2.57), (2.59), si (2.60) adica

![]()
sau
mai mult cu relatiile (2.50), (2.51) si (2.52) rezulta
dL2 = (T1-T0)r1w1dt+Mf1w dt+Me w dt-Mf1w dt-Me w dt-(T2-T0)
r1w1dt-Fr1w1dt-Nhvrdt = (T1-T0-T2+T0-F)w1r1dt-Nhvrdt = Nhw1r1dt-Nhvrdt
In sfarsit, facand inlocuirea w r1 = vt (viteza teoretica a tractorului), rezulta:
dL2 = Nh(vt-vr)dt , (2.61)
unde vt-vr este "pierderea de viteza" datorita alunecarilor.
Daca inlocuim relatiile (2.52 ), (2.52) si (2.51) in (2.50), rezulta momentul la janta rotii motoare sub forma urmatoare:

Sau,
adunand si scazand produsul Nh3r1, sub forma
(2.62)
unde
Mh = Nh3r1 - momentul rezistent datorat componentei reactiunii solului dupa directia caii redus la janta rotii motoare;

![]()
momentul
rezistent datorita fortelor tangentiale de inertie aflate
in miscare de rotatie, redus la janta rotii motoare;
momentul
rezistent al tuturor fortelor de frecare redus la janta rotii
motoare, care actioneaza asupra sistemului de propulsie.
Inmultind in (2.62), in ambii membrii, cu w dt, obtinem lucrul mecanic elementar transmis senilei de roata motoare sub forma:
Mj1w1dt = (Nh-nh3)r1w1dt+Me w dt+Mf1w dt sau, cu
w r1=vt=vr+(vt-vr) si cu Mh = Nh3r1, rezulta
Mj1w dt = Me w dt +Mf1w dt+(Nh-Nh3)vtdt+Nh3vtdt =
Me w dt+Mf1w dt+(Nh-Nh3)vrdt+(Nh-Nh3)(vt-vr)dt+Nh3vrdt+Nh3(vt-vr)dt =Me w dt+Mf1w dt+Nh3vrdt+(Nh-Nh3)vrdt+(Nh-Nh3+Nh3)(vt-vr)dt
In sfarsit rezulta:
Mj1w dt = Mf1w dt+Me w dt+Nh(vt-vr)dt+Nh3vrdt+(Nh-Nh3)vrdt
(2.63)
Cu alte cuvinte, lucrul mecanic elementar Mj1w dt, aplicat la janta rotii motoare, trebuie sa echilibreze lucrul mecanic elementar rezistent Mfw dt datorat frecarilor, lucru mecanic elementar rezistent Mew1dt datorat fortelor tangentiale de inertie a maselor sistemului de propulsie aflate in miscare de rotatie, lucru mecanic elementar rezistent (Nh-Nh3)vrdt de impingere a vehiculului.
4.3. Randamentul rularii
Se calculeaza cu relatia
hw hshhhg (2.64)
unde
este
randamentul senilei, (2.65)
![]()
este
randamentul autopropulsarii (2.66)
![]()
este
randamentul progresiunii (2.67)
(se considera pierderile numai prin alunecare), unde
l - pasul senilei
z - numarul elementelor de senila ce se pot infrana pe toata periferia rotii motoare,
nj - numarul de rotatii efectuat de roata motoare intr-un timp "t" pentru parcurgerea spatiului s.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |