GRAFURI
Notiunea de graf
Fie X o
multime nevida si ![]() multimea perechilor de elemente din X. Daca x ≠ y atunci perechea este identica cu perechea . De asemenea, este
un element al multimii P2(X).
Fie E o submultime nevida a multimii P2(X), E =
multimea perechilor de elemente din X. Daca x ≠ y atunci perechea este identica cu perechea . De asemenea, este
un element al multimii P2(X).
Fie E o submultime nevida a multimii P2(X), E =
Un graf este un cuplu G = (X,E) in care:
Elementele ![]() sunt denumite noduri
(sau varfuri) ale grafului G iar elementele multimii E sunt denumite
muchii. Doua muchii avand aceleasi extremitati sunt numite
paralele. O muchie e= cu
extremitatile identice este o bucla. Un graf care nu are nici bucle
nici muchii paralele se numeste graf simplu. Numarul elementelor
multimii X, notat | X |, este ordinul grafului G iar numarul elementelor
multimii E, notat | E |, dimensiunea grafului G. Daca | X | = n si | E |=
m atunci graful G = (X, E) este un (n, m) - graf. Graful G = (X, E) se numeste graf finit daca multimile X
si E sunt finite.
sunt denumite noduri
(sau varfuri) ale grafului G iar elementele multimii E sunt denumite
muchii. Doua muchii avand aceleasi extremitati sunt numite
paralele. O muchie e= cu
extremitatile identice este o bucla. Un graf care nu are nici bucle
nici muchii paralele se numeste graf simplu. Numarul elementelor
multimii X, notat | X |, este ordinul grafului G iar numarul elementelor
multimii E, notat | E |, dimensiunea grafului G. Daca | X | = n si | E |=
m atunci graful G = (X, E) este un (n, m) - graf. Graful G = (X, E) se numeste graf finit daca multimile X
si E sunt finite.
Reprezentare grafica. Elementele esentiale ale unui graf - nodurile si muchiile - se pot vizualiza printr-un desen in care nodurile sunt reprezentate prin puncte (cercuri) arbitrar plasate in plan iar muchiile prin linii (drepte sau curbe) care unesc punctele corespunzatoare extremitatilor x si y. Distributia nodurilor in plan este conventionala, urmarindu-se doar buna vizualizare a desenului, lungimea muchiilor si unghiurile dintre ele neavand nici o semnificatie practica.
Pentru evitarea confuziilor vom nota, in continuare, o muchie ce uneste nodurile cu etichetele x si y prin [x, y] avand semnificatia unui segment (din geometrie). Muchia [x, y] este identica cu [y, x].
Exemplu:
Fie G = (X, E) un graf cu ![]() si
si ![]() . Multimea Xeste
reprezentata prin sase puncte in plan, corespunzatoare nodurilor
x1, x2, x3,
x4, x5, x6 incadrate in cercuri. Relatia
intre noduri este data de muchiile din E. Fiecarei muchii i se asociaza o
pereche de noduri: e1 = [x1 ,x2], e2 =
[x1, x3], e3 = [x2, x4], e4 =
[x3, x4], e5 = [x4, x6], e6
= [x6,x6]. Muchiile sunt trasate prin segmente
de dreapta (sau printr-o curba in cazul unei bucle).
. Multimea Xeste
reprezentata prin sase puncte in plan, corespunzatoare nodurilor
x1, x2, x3,
x4, x5, x6 incadrate in cercuri. Relatia
intre noduri este data de muchiile din E. Fiecarei muchii i se asociaza o
pereche de noduri: e1 = [x1 ,x2], e2 =
[x1, x3], e3 = [x2, x4], e4 =
[x3, x4], e5 = [x4, x6], e6
= [x6,x6]. Muchiile sunt trasate prin segmente
de dreapta (sau printr-o curba in cazul unei bucle).

Figura 1.2
Graful din figura 1.2 este un graf etichetat; nodurile sunt notate prin etichetele x1, x2, x3, x4, x5, x6. Evident G este un (6, 6) - graf. Nodul x5 este un nod izolat nefiind legat de celelalte noduri prin nici o muchie. Muchia [x6, x6 este o bucla si este reprezentata printr-o linie curba.
Adiacenta si incidenta. Fie G = (X, E) un graf si xi xj ε X. Nodurile xi si xj sunt noduri adiacente daca sunt extremitatile unei muchii a grafului. Doua muchii se vor numi adiacente daca au o extremitate in comun.
Subgraf. Un graf H = (Y, F) este un subgraf
al grafului G = (X, E) daca Y ![]() X, F
X, F ![]() E si orice muchie
din F are acelasi extremitati in G si H. Subgraful H se
obtine din graful G prin eliminarea a cel putin un nod
si/sau stergerea unor muchii si a tuturor muchiilor care au
macar o extremitate in nodurile eliminate.
E si orice muchie
din F are acelasi extremitati in G si H. Subgraful H se
obtine din graful G prin eliminarea a cel putin un nod
si/sau stergerea unor muchii si a tuturor muchiilor care au
macar o extremitate in nodurile eliminate.
Graful este un instrument util in studiul unor colectii de entitati intre care exista anumite legaturi.
Exemple:
retele de transport in care entitatile sunt localitati, fabrici, depozite iar legaturile sunt drumuri auto, feroviare, aeriene sau navale pe care se pot face deplasari de la un punct la altul;
retele de comunicatie audio, video, calculator prin care se conecteaza localitati, locuinte, institutii, birouri;
actiuni complexe compuse dintr-un mare numar de activitati intre care exista relatii de precedenta in ceea ce priveste executia;
structuri organizationale compuse din elemente - persoane fizice, departamente, birouri - intre care exista relatii de subordonare;
retele genealogice, retele electrice etc.
1.2 Lanturi si cicluri
Fie G = (X, E) un graf se numeste un lant in graful G o succesiune de muchii
![]()
cu proprietatea ca fiecare
muchie ei are o extremitate comuna cu
muchia precedenta si
cealalta extremitate in comun cu muchia urmatoare. Numarul p al
muchiilor din sirul (1.4) se
numeste lungimea lantului ![]() .
.
Un lant poate de lungime 1 este o muchie iar un lant de lungime 2 este constituit din doua muchii adiacente.
Daca pentru lantul ![]() din (1.4) este
nevoie sa se puna in evidenta si
extremitatile muchiilor
alcatuitoare se va folosi si notatia alternativa:
din (1.4) este
nevoie sa se puna in evidenta si
extremitatile muchiilor
alcatuitoare se va folosi si notatia alternativa:
![]() (1.5)
(1.5)
in care xi-1 si xi sunt extremitatile muchiei ei.
Nodurile xo
si xpse numesc extremitatile lantului ![]() ; celelalte, adica xi,, xp-1 se numesc noduri
intermediare.
; celelalte, adica xi,, xp-1 se numesc noduri
intermediare.
Se numeste ciclu un lant ale carui extremitati coincid.
Daca notatia
(1.5) nodurile xo si xp coincid, adica ![]() este un ciclu,
convenim ca si xo sa fie socotit nod
intermediar. Notatia (1.5) pune in evidenta succesiunea
de noduri:
este un ciclu,
convenim ca si xo sa fie socotit nod
intermediar. Notatia (1.5) pune in evidenta succesiunea
de noduri:
(x0, x1, x2,,xp-1, xp)
Despre ele vom spune
ca sunt nodurile lantului ![]() sau ca
sunt nodurile prin care trece lantul X
sau ca
sunt nodurile prin care trece lantul X
Succesiunea (1.6) NU
determina complet lantul ![]() decat in cazul in care graful G este simplu.
decat in cazul in care graful G este simplu.
Lantul ![]() , dat prin notatia (1.5) se numeste:
, dat prin notatia (1.5) se numeste:
lant simplu daca muchiile e1, e2,, ep sunt diferite;
lant elementar daca nodurile xo,
x1, x2,, xp-1,
xp sunt diferite cu exceptia,
eventual, a extremitatilor x0 si xp care
pot coincide cand ![]() este ciclu.
este ciclu.
Evident, un lant elementar este si simplu dar reciproca nu este in general valabila.
Consideram doua lanturi:
![]() = (e1,e2,,ep)si
μ = (f1,
f2,, fq)
= (e1,e2,,ep)si
μ = (f1,
f2,, fq)
Vom spune ca
lantul ![]() este inclus in lantul si notam
este inclus in lantul si notam ![]() daca muchiile e1, e2,,
ep se gasesc printre muchiile f1, f2,,
fq,
daca muchiile e1, e2,,
ep se gasesc printre muchiile f1, f2,,
fq,
Sa presupunem
ca extremitatile lantului ![]() sunt nodurile x si y, iar
extremitatile lantului sunt nodurile y si
z, astfel:
sunt nodurile x si y, iar
extremitatile lantului sunt nodurile y si
z, astfel:
![]() =(x, e1,
e2,, ep, y) si = (y, f1, f2 fq, z)
=(x, e1,
e2,, ep, y) si = (y, f1, f2 fq, z)
Atunci succesiunea de muchii:
(e1, e2,, ep, f1, f2,., fq)
este un lant cu
extremitatile x si z, notat ![]() . Despre lantul
. Despre lantul ![]() vom spune ca a rezultat din
concatenarea lungimilor lanturilor
vom spune ca a rezultat din
concatenarea lungimilor lanturilor ![]() si
si ![]()
Orice lant contine un unic lant elementar cu aceleasi extremitati.
1.3 Grafuri conexe
Sa consideram urmatoarea relatie binara intre nodurile unui graf G = (X, E): x ~ y (x este in legatura cu y) sau x ≡y sau x ≠ y daca si numai daca exista cel putin un lant de muchii cu extremitatile x si y.
Relatia introdusa este: - reflexiva:
x ~ x,![]()
- simetrica: x ~ y => y ~ x; - tranzitiva: x~ysiy~z=>x~z.
este deci o relatie de echivalenta in multimea X a nodurilor grafului G. Ea imparte X intr-un numar de submultimi nevide si disjuncte:
![]() cu
proprietatile:
cu
proprietatile:
oricare doua noduri diferite apartinand aceleasi submultimi Vi, sunt extremitatile unui lant de muchii;
nu exista muchii avand o extremitate intr-o submultime Vi si cealata extremitate intr-o alta submultime Vj cu j≠i.
Daca notam cu E(Vi) multimea muchiilor avand ambele extremitati in submultimea de noduri Vi rezulta ca:
![]()
![]()
Subgrafurile
![]()
se numesc componentele conexe ale grafului G. Graful G se numeste conex daca are o singura componenta conexa.
Un graf este conex daca si numai daca oricare doua noduri distincte ale sale sunt extremitatile unui lant de muchii.
1.4 Cateva clase importante de grafuri
Graf complet.
Graful G = (X, E) este complet daca oricare doua noduri x,y e X ale
sale sunt extremitatile unei singure muchii. Graful complet cu n
noduri se noteaza cu Gn si are ![]() muchii;
muchii;


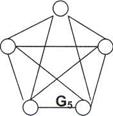
a)
b)
c)
d)
Figura 1.3
Graf bipartit.
Un graf este bipartit daca multimea nodurilor sale este
partitionata in doua submultimi disjuncte S si T ![]() astfel incat orice
muchie
astfel incat orice
muchie ![]() are extremitatea a in S si extremitatea b in T. Un graf bipartit se noteaza
are extremitatea a in S si extremitatea b in T. Un graf bipartit se noteaza
![]() . intr-un graf bipartit, doua noduri din aceeasi
submultime S sau T nu pot fi adiacente.
. intr-un graf bipartit, doua noduri din aceeasi
submultime S sau T nu pot fi adiacente.


a b
Figura 1.4
In figura 1.4 sunt reprezentate grafuri bipartite.
Un
graf bipartit ![]() este complet daca pentru orice nod
este complet daca pentru orice nod ![]() si orice nod
si orice nod ![]() exista o muchie [x, y]. Graful din figura 1.4 a nu este
complet dar graful din figura 1.4 b este complet.
exista o muchie [x, y]. Graful din figura 1.4 a nu este
complet dar graful din figura 1.4 b este complet.
Un graf simplu este bipartit daca si numai daca NU contine cicluri de lungime impara.
Arbori. Un graf se numeste arbore daca este conex si fara cicluri
Urmatoarele proprietati sunt echivalente si caracterizeaza calitatea unui graf H de a fi arbore:
Fie G = (X,E) un graf oarecare se numeste arbore generator al grafului G un subgraf H = (X,A) cu aceleasi noduri ca si G si este de sine statator este un arbore adica un graf conex si fara cicluri.
Graful G are macar un arbore generator daca si numai daca este conex.
Graf planar. Un graf G=(X,E) se numeste planar daca exista o reprezentare grafica a sa cu proprietatea ca oricare doua muchii nu se intersecteaza decat cel mult in extremitati. Grafurile din figurile 1.3 G4 si 1.4 b sunt planare cel din figura 1.3 G5 nu este planar.
1.5 Orientare si neorientare in graf
Fie
G = (X,E) un graf pe care il presupunem simplu. Aceasta inseamna ca
oricare doua noduri diferite sunt extremitatile a cel mult o
muchie. Astfel, fiecare muchie ![]() identifica cu multimea a
extremitatilor sale.
identifica cu multimea a
extremitatilor sale.
Fie o muchie oarecare din G. Perechile ordonate (x, y) si (y, x) se numesc arce generate de muchia . Despre oricare din aceste arce vom spune ca este opus celuilalt, iar muchia este suportul celor doua arce.
Pentru arcul (x, y) nodul x va fi extremitatea initiala iar nodul y va fi extremitatea finala.
A da o orientare pe muchia sau a orienta muchia inseamna a alege unul dintre cele doua arce (x, y) sau (y, x), generat de muchia . Arcul ales se va numi arc permis iar celalalt vom spune ca este blocat.
Daca muchia a fost orientata prin alegerea arcului (x, y) vom zice ca muchia 'poate fi parcursa de la x la y'. Daca muchia nu este orientata vom spune ca ea "poate fi parcursa in ambele sensuri si de x la y si de la y la x'.
 A
da o orientare in graful G inseamna a da o orientare pe unele din muchiile
sale. Graful G = (X, E) este orientat (partial orientat) daca toate
muchiile sale (respectiv doar o parte din ele) au fost orientate.
A
da o orientare in graful G inseamna a da o orientare pe unele din muchiile
sale. Graful G = (X, E) este orientat (partial orientat) daca toate
muchiile sale (respectiv doar o parte din ele) au fost orientate.
Presupunem ca in graful G = (X,E) s-a dat o orientare oarecare: vida, partiala sau totala. Vom nota cu U multimea arcelor permise.
in contextele in care orientarea muchiilor este necesara, pentru graful G vom folosi notatia G = (X, E, U).
Se numeste drum in graful G = (X, E, U) o succesiune de arce permise
![]()
(1.1)
cu proprietatea ca extremitatea finala a arcului Ui coincide cu extremitatea intiala a arcului ui+1, unde i=1,,p-1. Numarul p al arcelor alcatuite se numeste lungimea drumului μ.
Daca pentru drumul fi este necesar sa se puna in evidenta extremitatile arcelor componente vom folosi notatia alternativ
μ = (x0, ui, xi, u2, x2,,ui-1, ui, xi,,xp-1, up,xp)
unde xi+1 este extremitatea initiala a arcului ui iar xi extremitatea finala. Deoarece graful G este presupus simplu drumul μ din (1) sau (2) este perfect determinat si de succesiunea de noduri:
(x0, x1, x2,, xp-1, xp) (1.3)
Nodul x0 este extremitatea initiala a drumului μ iar xp extremitatea finala.
Celelalte noduri, adica x1,, xp se numesc noduri intermediare " prin care trece' drumul μ,
Daca extremitatile x0 si xp coincid vom spune despre drumul μ ca este un circuit. Daca este asa socotim si nodul x0, ca nod intermediar.
Sa consideram acum suporturile e`, e2, ,ep ale arcelor permise u1,u2,,up ce compun drumul μ . Este clar ca succesiunea de muchii (e1,e2, ,ep) este un lant denumit suportul drumului μ. Atat drumul μ cat si lantul suport au aceleasi extremitati si aceleasi noduri intermediare iar daca μ este un circuit suportul va fi un ciclu.
Consideratiile precedente sugereaza urmatoarea generalizare. Se numeste lant de arce permise o succesiune:
![]()
de arce permise cu proprietatea ca succesiunea de
muchii ![]() in care ei
este suportul arcului vi este un lant de muchii.
in care ei
este suportul arcului vi este un lant de muchii.
Orice drum este un lant de arce permise dar reciproca nu este adevarata; intuitiv, un lant de arce este un drum numai daca arcele componente 'au aceeasi orientare'.
in mod firesc vom defini extremitatile si nodurile intermediare ale uni lant de arce ca fiind extremitatile si nodurile intermediare ale lantului de muchii suport.
Un ciclu de arce permise va fi un lant de arce permise ale carui extremitati coincid.
Un lant de arce permise (in particular un drum) se va numi simplu (elementar) daca arcele componente sunt diferite (respectiv daca nodurile prin care trece sunt diferite cu exceptia eventual a extremitatilor care pot coincide).
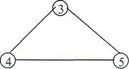
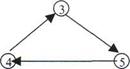
Exemplu: Consideram graful simplu din figura 1.7a) in care s-a dat o orientare pe o parte a muchiilor componente; orientare indicata in figura 1.7b):
 este un drum elementar de lungime 3
este un drum elementar de lungime 3
Succesiunea:
reprezentata mai sugestiv
este un circuit elementar de lungime 3.
![]()
Muchia reprezentata sugestiv
![]() nu
este orientata si ca urmare ambele arce generate (3,5) si (5,3)
reprezentate sugestiv prin sunt
considerate permise.
nu
este orientata si ca urmare ambele arce generate (3,5) si (5,3)
reprezentate sugestiv prin sunt
considerate permise.
Succesiunile:
si
sunt lanturi elementare de arce premise cu acelasi support si anume:
![]()
Ciclul de muchii:
este suportul comun al circuitului:
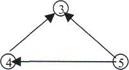
cat si a ciclului de arce permise:
§ 2. Problema drumului de valoare minima
Fie
G = (X,E) un graf finit. Daca![]() este o muchie cu extremitatile xi,
si xj, atunci aceasta muchie are o orientare permisa
prin arcele (xi, xj) si (xj, xi).
In acest mod, un graf neorientat este tratat ca graf orientat G = (X, U). In
continuare, ne referim numai la grafuri
este o muchie cu extremitatile xi,
si xj, atunci aceasta muchie are o orientare permisa
prin arcele (xi, xj) si (xj, xi).
In acest mod, un graf neorientat este tratat ca graf orientat G = (X, U). In
continuare, ne referim numai la grafuri
orientate finite.
Un
arc ![]() este valorizat
daca i se asociaza o valoare numerica reala pozitiva v(u) ≥
0, numita valoarea arcului u sau
ponderea arcului u. Un graf G = (X,
U) este valorizat daca arcele sale sunt valorizate. Daca arcul u este dat prin
extremitatile sale
este valorizat
daca i se asociaza o valoare numerica reala pozitiva v(u) ≥
0, numita valoarea arcului u sau
ponderea arcului u. Un graf G = (X,
U) este valorizat daca arcele sale sunt valorizate. Daca arcul u este dat prin
extremitatile sale ![]() , valoarea arcului va fi data si prin
notatiile v(xi xj), sau vij. Daca u este
o muchie in graful G = (X, E) atunci v(u) = v(xi, xj) =v(xj,
xi), deci pe ambele directii arcul are aceeasi
valoare. Valorile asociate arcelor pot reprezenta distante intre doua
localitati, costurile executarii unei lucrari pe
tronsoanele respective, costurile trecerii unei linii de fabricate de la un
produs la altul, timpii de executie ai unor activitati,
masura sigurantei transmisiunii unui semnal etc.
, valoarea arcului va fi data si prin
notatiile v(xi xj), sau vij. Daca u este
o muchie in graful G = (X, E) atunci v(u) = v(xi, xj) =v(xj,
xi), deci pe ambele directii arcul are aceeasi
valoare. Valorile asociate arcelor pot reprezenta distante intre doua
localitati, costurile executarii unei lucrari pe
tronsoanele respective, costurile trecerii unei linii de fabricate de la un
produs la altul, timpii de executie ai unor activitati,
masura sigurantei transmisiunii unui semnal etc.
Pentru
un drum μ intre nodul ![]() si nodul
si nodul![]() , precizat prin specificarea arcelor componente, se
defineste valoarea drumului μ ca fiind suma valorilor arcelor
componente:
, precizat prin specificarea arcelor componente, se
defineste valoarea drumului μ ca fiind suma valorilor arcelor
componente:
![]() (2.1)
(2.1)
Un
drum este o succesiune de arce permise: ![]() cu proprietatea ca pentru orice 1 ≤ i ≤ q-1 extremitatea finala a
unui arc ui coincide cu extremitatea initiala a arcului ui+1.
Numarul arcelor componente defineste lungimea |(μ) a drumului μ.
cu proprietatea ca pentru orice 1 ≤ i ≤ q-1 extremitatea finala a
unui arc ui coincide cu extremitatea initiala a arcului ui+1.
Numarul arcelor componente defineste lungimea |(μ) a drumului μ.
Drumurile de lungime 1 se identifica cu arcele permise ale grafului. Daca U1=(x0, x1), u2 = (x1, x2),,uq = (xq-1,xq) sunt arcele date prin extremitatile lor, atunci un drum poate fi definit si prin succesiunea de noduri:
![]()
Nodul xo este extremitatea de start a drumului μ iar nodul xq extremitatea finala. Daca extremitatile sale coincid (x0 = xq) atunci drumul μ este un circuit.
Un
drum este elementar daca nodurile sale sunt distincte (drumul trece o
singura data prin fiecare nod al sau). Un drum este simplu
daca arcele sale sunt distincte (drumul trece o singura data
prin fiecare arc al sau). Evident, orice drum elementar este si
simplu. Reciproca nu este, in general, adevarata. Multimea
drumurilor elementare dintr-un graf finit este finita. Un drum μ dintr-un graf G este inclus in drumul
![]() daca toate arcele drumului μ sunt arce si ale drumului μ'.
daca toate arcele drumului μ sunt arce si ale drumului μ'.
Evident, v(μ) ≤ v(μ').
Daca
![]() si
si ![]() sunt doua drumuri din G, acestea sunt concatenabile in
ordinea "μ1 urmat de μ2" daca
sunt doua drumuri din G, acestea sunt concatenabile in
ordinea "μ1 urmat de μ2" daca ![]() (extremitatea finala a drumului μ1 coincide cu extremitatea de start a drumului μ2). Prin concatenare
(se obtine drumul:
(extremitatea finala a drumului μ1 coincide cu extremitatea de start a drumului μ2). Prin concatenare
(se obtine drumul:
![]()
cu lungimea:
![]()
Deci, prin concatenare, orice drum μ intr-un graf G se reprezinta in forma:
![]()
unde μ1, μ2,.., μn sunt drumuri si/sau circuite elementare, nu neaparat distincte. De asemenea, orice drum μ din graful G contine un unic subdrum elementar μ'avand aceleasi extremitati ca si μ .
In graful G din figura 2.1, drumul μ = (1, 3, 5, 4, 3, 2, 4, 5, 6) se descompune in urmatoarele drumuri si circuite elementare:
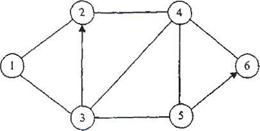
Figura 2.1
![]()
Drumul μ = (1, 3, 2, 4, 5, 6) este un drum elementar avand aceleasi extremitati ca si drumul μ.
O problema extremala intr-un graf orientat G = (X, U) consta in determinarea unui drum elementar (sau a drumurilor elementare), intre doua noduri date, de valoare minima (sau de valoare maxima).
Fie s si t doua noduri oarecare ale grafului G. Notam cu G*(s, t) un subgraf al grafului G format din multimea drumurilor din graful considerat G = (X, U) intre nodurile s si t, in care sunt incluse si drumurile de lungime 1. Problema drumurilor de valoare minima intre nodurile s si t se defineste ca problema determinarii drumului μ* de la nodul s la nodul t in graful G*(s, t), de valoare minima:
![]() (2.2)
(2.2)
Daca se considera drumurile de valoare minima de la un nod s la oricare alt nod al grafului G, multimea acestor drumuri formeaza un graf partial orientat in G, numit graful drumurilor de valoare minima cu originea in nodul s si este notat G*(s) simplu G*.
Problema pusa in acest fel cuprinde si problema determinarii drumurilor de valoare minima de la nodul s la un alt nod oarecare t. intr-adevar, daca in G*(s) figureaza si nodul t, atunci in acest graf vom gasi si drumurile de valoare minima de la s lat
Daca luam in considerare numai drumurile elementare de la s la t, deoarece multimea acestora este finita, atunci exista, intotdeauna, un drum de la s la t de valoare minima. Aceste drumuri elementare sunt identificate greoi, motiv pentru care drumurile de valoare minima se determina considerand, in graf, toate drumurile elementare sau neelementare intre cele doua noduri.
Este posibil ca problema (2.2) sa nu admita solutii optime (de exemplu in cazul existentei circuitelor de valoare negativa). in acest caz, exista o infinitate de drumuri de la s la t a caror multime de valori poate fi nemarginita inferior.
Pentru ca multimea drumurilor elementare este finita minimul acesteia este efectiv atins intr-un element al acesteia si problema are solutii, in sensul ca exista drumuri de valoare minima.
Un circuit in graful G de valoare strict negativa este numit circuit absorbant. Deoarece problemele de determinare a drumurilor de valoare minima intre nodurile date se rezolva considerand toate drumurile posibile, nu numai cele elementare, vom presupune verificata urmatoarea conditie: in graful G nu exista circuite de valoare strict negativa.
Determinarea drumului de valoare minima poate avea loc intr-un graf in care valorile sau ponderile arcelor sunt nenegative. in grafuri in care exista arce cu ponderi negative, sunt necesare eforturi mai mari pentru rezolvare; in acest caz se va presupune indeplinita conditia: nu exista circuite de valoare strict negativa (absorbante).
Daca extremitatea de start a unui drum este un nod sursa s si extremitatea finala un nod destinatie t, problemele extremale pe care le analizam in continuare, se grupeaza in trei categorii:
Problemele din categoria a treia pot fi rezolvate ca problemele din categoria a doua, dar pe graful transpus grafului dat. in graful transpus, nodul t devine sursa si se determina G*(t) si drumul de valoare minima. Dupa rezolvare, se face transpunerea grafului G*(t) si se obtine drumul de valoare minima de la fiecare nod la nodul destinatie t.
Daca μ si μ'sunt drumuri elementare in G avand aceleasi extremitati, atunci drumurile pot fi comparabile: fie v(μ') ≤ v(μ), fie v(μ') ≤ v(μ').
In cazul in care exista drumuri de la s la t, evaluarea si compararea acestora, conform afirmatiei anterioare, se poate limita la drumurile elementare cu aceleasi extremitati. Numarul drumurilor elementare fiind finit unul dintre ele va fi drumul de la s la t de valoare minima.
Daca graful G nu este conex si nodurile s si t nu fac parte din aceeasi componenta conexa sau orientarile pe arce nu permit atingerea nodului t din nodul s, exista posibilitatea ca in graful G sa nu existe drumuri de la s la t.
§ 3. Problema arborelui de cost minim
In optimizarea combinatoriala, problema arborelui de cost minim are numeroase aplicatii practice. Contextul general este urmatorul: un numar de 'puncte' trebuie conectate intre ele pentru facilitarea transmiterii unui anumit serviciu (telefon, TV, calculator). intre puncte exista 'legaturi potentiale' a caror realizare implica un anumit cost.
Problema care apare este aceea de a vedea ce legaturi vor fi efectiv realizate astfel incat:
Algoritm de rezolvare a problemei arborelui de cost minim:
Algoritmul lui Kruskal:
Pasul 1 Dintre toate muchiile grafului se alege muchia de valoare minima.
Daca minimul este multiplu se alege la intamplare una din muchiile
respective;
Pasul 2 Dintre toate muchiile ramase, se alege
cea de valoare minima, astfel incat sa nu se formeze cicluri cu cele
deja alese;
Pasul 3 Se reia algoritmul de la pasul 3 pana se colecteaza n-1 muchii.
Desi s-a demonstrat ca algoritmul gaseste intotdeauna arborele optim, el are dezavantajul ca este foarte laborios (de fiecare data trebuie calculat minimul unei multimi mari sau foarte mari - exista situatii in practica in care graful are sute de mii de arce) si, in plus, trebuie aplicat un algoritm special ca sa respectam conditia de a
nu se forma cicluri,
la alegerea unui nou arc.
De asemenea este clar ca,
in cazul existentei arcelor de valori egale, deoarece se alege la
intamplare, exista mai multe variante de evolutie a alegerii arcelor.
Totusi, cu toate ca pot fi mai multe grafuri la care se poate ajunge
prin acest algoritm, ele vor avea toate aceeasi valoare (minima
posibila).
§ 4. Problema comisvoiajorului
Un comisvoiajor are de vizitat un numar de orase, la sfarsitul voiajului el intorcandu-se in localitatea de plecare. Deplasarea dintr-o localitate in alta presupune anumite cheltuieli (sau distante de parcurs sau durate de mers).
In ce ordine trebuiesc vizitate orasele astfel incat costul total al deplasarii (sau lungimea traseului sau durata calatoriei) sa fie minim?
Astfel enuntata, problema comisvoiajorului (notata pe scurt TSP de la Travelling Salesman Problem) este una din cele mai grele probleme de optimizare combinatoriala. Pe langa importanta teoretica, ea are numeroase aplicatii practice. De exemplu, stabilirea celor mai 'economice' trasee turistice intr-un mare oras sau zona istorica (din punctul de vedere al costurilor sau distantelor) este o problema a comisvoiajorului. De asemenea, stabilirea ordinii in care un numar de operatii (joburi) vor fi executate pe un utilaj, astfel incat suma timpilor de pregatire ai utilajului sa fie cat mai mica, este o problema de acelasi tip.
4.1 Modelul matematic al problemei comisvoiajorului
Sa notam cu 0,1,,n orasele problemei, 0 fiind orasul din care comisvoiajorul pleaca si in care revine la terminarea calatoriei. Fie cij costul deplasarii din localitatea i in localitatea j≠i; punem cij = ∞ daca nu exista legatura directa intre i si j sau in cazul i = j. Un traseu va fi descris cu ajutorul variabilelor bivalente :
![]()
1, daca traseul trece direct de la orasul I la orasul j, i≠j;
Xij= 0, in caz contrar sau daca, i=j;
Urmeaza a fi minimizata functia:
![]() (4.1.1)
(4.1.1)
Din orice oras i, comisvoiajorul trebuie sa se indrepte catre o alta localitate, astfel ca:
![]() (4.1.2)
(4.1.2)
in orice oras ar ajunge, comisvoiajorul vine dintr-o localitate anterior vizitata, asa ca:
![]() (4.1.3)
(4.1.3)
Observam ca ansamblul (4.1.1) - (4.1.3) constituie modelul matematic (PA) al unei probleme generale de afectare. O examinare mai atenta a problemei arata ca restrictiile (4.1.2) si (4.1.3) nu definesc numai trasee ce trec prin toate orasele (o singura data!) ci si 'reuniuni' de circuite disjuncte mai mici! Astfel intr-o problema cu 7 orase 0,1,,6 ansamblul:
x03 = x35 = x5o = x21 = x14 = x46 = x67 = x72 = 1 , xij = 0 in rest
satisface restrictiile (4.1.2) si (4.1.3) dar nu constituie un traseu complet asa cum se vede din figura 4.1
Pentru evitarea acestui neajuns asociem oraselor 1,2,,n , diferite de localitatea de plecare si sosire 0, variabilele y1,y2,,yn si introducem inegalitatile:
yi - yj + nxij ≤ n-1, i,j = 1,2..n; i ≠ j (4.1.4)
In principiu noile variabile pot lua orice valoare reala. Vom arata ca daca x = (xij) determina un traseu complet atunci exista valori numerice y1, y2,.. .,yn care impreuna cu xij satisfac relatiile (4.1.4). Intr-adevar, definim yi ca fiind numarul de ordine al localitatii i in cadrul traseului determinat de x. Pentru i≠j doua situatii sunt posibile:
Sa presupunem acum ca z = (xij) defineste o reuniune de 'subtrasee' disjuncte. Alegem unul care nu trece prin localitatea 0 si fie k numarul deplasarilor cel compun. Presupunand ca ar exista valori numerice y1, y2,,yn care sa satisfaca (4.1.4) insumam pe acelea corespunzatoare deplasarilor de la un oras la altul din subtraseul ales. Obtinem nk ≤ (n - l)k ceea ce este evident fals.
In concluzie, ansamblul (4.1.1) - (4,1.4) constituie modelul 'corect' al problemei comisvoiajorului. Este vorba de un program mixt ce utilizeaza atat variabile intregi (bivalente) cat si variabile care pot lua orice valoare. In continuarea unei observatii anterioare, putem spune ca problema comisvoiajorului.(TSP) este o problema de afectare (PA) (ansamblul (4.1.1) - (4.1.3)) cu restrictiile speciale (4.1 .4).
In consideratiile de mai sus costurile cij nu sunt 'simetrice' adica este posibil ca cij≠cij. Problema simetrica a comisvoiajorului se caracterizeaza prin cij = cji; aceasta se intampla daca , de exemplu, cij sunt distante sau timpi de parcurgere.
Un caz particular al problemei simetrice este asa numita problema euclidiana a comisvoiajorului in care distantele cij satisfac inegalitatea triunghiului:
![]()
![]()
4.2 Un algoritm exact de rezolvare a problemei comisvoiajorului
Urmatorul algoritm, de tip B&B, reduce rezolvarea TSP la rezolvarea unei liste de probleme de afectare. El s-a dovedit suficient de robust pentru probleme asimetrice cu un numar moderat de orase. Principalul dezavantaj il reprezinta faptul ca numarul problemelor de afectare de rezolvat este impredictibil si poate fi imens in cazul situatiilor reale. Algoritmul este datorat lui Eastman. Ca orice procedura de tip B&B, el utilizeaza:
La start:
Pasul 1. Daca lista L este vida stop. Altminteri, selecteaza o problema din lista L Problema aleasa se sterge din L . Se trece la:
Pasul 2. Se rezolva problema selectata. Daca valoarea functiei obiectiv este ≥ ZCMB se revine la pasul 1. Altminteri, se trece la:
Pasul 3. Daca solutia optima este un traseu complet se actualizeaza XCMB si ZCMB dupa care se revine la pasul 1. Altminteri se trece la:
Pasul 4. (Solutia optima nu este un traseu ci o reuniune de 'subtrasee mai mici'). Din solutia optima se selecteaza circuitul cu cel mai mic numar de arce. Pentru fiecare arc (i,j) din circuitul ales (pentru care xij = 1) se adauga la lista L problema obtinuta din cea rezolvata punand cij = ∞. Se revine la pasul 1.
Observatii:
Ratiunea pasului 4 este clara: daca i→j→k→.→l→i este circuitul selectat este clar ca in traseul optim vom avea:
xij = 0 sau kjk = 0 sau sau xli = 0.
In consecinta, vom cauta traseul optimal printre cele in care xij = 0 si daca nu este acolo printre cele in care xjk = 0 s.a.m.d. Limitarea la traseele in care xij = 0 se face efectuand schimbarea cij = ∞.
La pasul 4, in lista L vor aparea atatea probleme cate arce are circuitul selectat; de aceea se alege circuitul cu cel mai mic numar de arce!
In raport cu termenii generali ai unei metode B&B, ramificarea are loc la pasul 4 in timp ce marginirea se efectueaza la pasul 2.
Exemplu: Se considera problema asimetrica a comisvoiajorului cu cinci orase, definita de urmatoarea matrice a costurilor:
|
orase | |||||
Start: Se pleaca de la traseul0→1→2→3→4→0, care se retine in XCMB si al carui cost este ZCMB = 10+10 +20+15+10 = 65. Lista L a problemelor de afectare ce urmeaza a fi rezolvate coprinde numai problema initiala (PA).
Iteratia 1: Se sterge (PA) din lista L si se rezolva. Se obtine solutia optima:
X04 = x40 = x12 = x23 = x31 = 1 , Xij = 0 in rest ce corespunde reuniunii urmatoarelor subtrasee:
0→4→0 si 1→2→3→1
Selectam subtraseul 0→4→0 si adaugam la L problemele PA1 si PA2 derivate din PA inlocuind C04 respectiv C40 cu ∞.
Iteratia 2: Selectam problema PA1 si o rezolvam. Lista L va cuprinde mai departe numai problema PA2. Pentru PA1 se gaseste solutia optima:
x03 = x12 = x24 = x31= x40 = 1 , xij= 0 in rest
care corespunde traseului complet 0→3→1→2→4→0. Costul sau este ZCMB = 65.Nu am gasit deci un traseu mai bun decat cel pe care il avem in XCMB.
Iteratia 3: Rezolvam problema PA2, singura ramasa in L. Se obtine solutia optima:
x04 = x12 = x23 = x30 = x41 = 1 , xy = 0 in rest
care corespunde traseului 0→4→1→2→3→0. Costul noului traseu este ZCMB> 62, drept care il retinem in XCMB si actualizam ZCMB = 62.
Deoarece lista este acum vida traseul retinut in XCMB este optim.
4.3 Metode euristice de rezolvare aproximativa a problemei comisvoiajoruiui
De obicei, solutia optima a unei TSP este foarte greu de gasit (daca nu chiar imposibil de gasit) atunci cand numarul oraselor de vizitat este mare (peste 50). Pentru determinarea unei solutii macar acceptabile au fost elaborate mai multe procedee euristice. Aceste procedee merita atentie din doua puncte de vedere:
se poate da un 'certificat de garantie' pentru solutia obtinuta in sensul ca este posibila evaluarea 'departarii' maxime de solutia optima;
solutia aproximativa este gasita cu un efort de calcul relativ moderat si intr-un timp rezonabil, aceasta insemnand ca cei doi parametric depind polinomial de dimensiunea problemei (adica numarul de orase);
In multe situatii practice, procedeele euristice au condus chiar la solutia optima dar acest lucru a fost confirmat numai prin aplicarea unui algoritm exact.
In principiu, o metoda euristica construieste o solutie prin tatonare, din aproape in aproape, facand la fiecare pas cea mai buna alegere posibila. Din nefericire, aceasta 'schema' nu conduce, de regula, la cea mai, buna alegere globala.
In continuare, vom prezenta mai multe euristici pentru rezolvarea problemei euclidiene a comisvoiajoruiui adica a problemei in care Cij sunt distante ce satisfac:
conditia de simetrie: cij = cji;
inegalitatea triunghiului cik ≤cij + cjk;
Euristica E1 (mergi la cel mai apropiat vecin)
se pleaca din localitatea 0 catre localitatea cea mai apropiata;
din ultima localitate vizitata se pleaca catre cea mai apropiata localitate nevizitata; in caz ca nu mai exista localitati nevizitate se revine in locul de plecare;
Euristica E2 (Ajustare locala)
se pleaca de la un traseu complet, determinat fie "la intamplare' fie printr-o alta euristica;
se cauta doua arce (u,v) si (x,y) ale traseului care nu sunt consecutive si se compara distante cuv + cxy cu cux + cvy. Daca cuv+ cxy > cux + cuy se inlocuiesc arcele (u,v) si (x,y) cu (u,x) si (v,y) obtinandu-se un traseu de lungime mai mica ;
procedura se opreste in momentul in care nu mai exista situatii similare cu cea descrisa;
Euristica E3
Fie:
0→x→ y→ →u→v → 0 (4.3.1)
succesiunea in care muchiile multigrafului H' au fost parcurse. Lungimea acestui 'traseu' este de doua ori mai mare decat lungimea arborelui minimal H. In aceasta secventa, unul sau mai multe orase apar de mai multe ori. Vom proceda atunci la urmatoarea operatie de scurtcircuitare:
in succesiunea (4.3.1) se determina prima tripleta de orase succesiv vizitate
i→j → k cu proprietatea ca orasul j 'din mijloc' mai apare ulterior in succesiune. Se inlocuieste secventa i→j→k cu arcul i → k. Prin aceasta scurtcircuitare:
fiecare oras continua sa fie vizitat cel putin o data;
noul traseu este mai scurt pentru ca cij+cjk≥cik;
Operatia de scurtcircuit se repeta pana cand in secventa (4.3.1.) "actualizata" fiecare oras, cu exceptia localitatii 0 apare o singura data.
Se poate demonstra ca lungimea traseului obtinut prin aceasta euristica este cel mult de doua ori mai mare decat lungimea traseului optim (in practica lucrurile stau insa mai bine.)
Euristica E4
Aceasta procedura, datorata lui Cristofides, este o rafinare a euristicii precedente. Deoarece suma gradelor nodurilor din arborele H este para, numarul nodurilor de grad impar este par! Folosind numai aceste noduri si muchiile dintre ele vom determina cuplajul C de pondere minima, ponderile muchiilor luate in calcul fiind distantele dintre extremitati.
Fie H' graful rezultat din H prin adaugarea muchiilor cuplajului C, cu mentiunea ca daca intre doua noduri avem o muchie in H si o alta in C, graful H' va avgea intre nodurile respective doua muchii. Prin constructie, in H' fiecare nod are grad par, astfel ca H' are un ciclu eulerian. Plecand de aici si utilizand de aici si utilizand tehnica scurtcircuitarii se ajunge la un traseu complet.
Se poate arata ca lungimea acestui traseu nu depaseste 3/2 din lungimea traseului optim.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
