Stabilitatea planorului
1. Echilibrul corpurilor
Un corp se afla in echilibru daca rezultantele fortelor si momentelor care actioneaza asupra sa sunt nule:
|
|
Exista trei stari de echilibru:
a. echilibru stabil;
b. echilibru instabil;
c. echilibru indiferent.
Fiecare dintre aceste trei stari se poate referi la un echilibru static (de pozitie) sau la un echilibru dinamic (de miscare).
A. Echilibrul static
a. vom spune ca un corp se afla in stare de echilibru static stabil, daca, fiind scos din pozitia de echilibru de o forta perturbatoare, revine singur la starea initiala (fara interventii exterioare).
Exemplu: o bila asezata in partea cea mai de jos a unei suprafete concave, sau un pendul (vezi Fig. 56.A.).
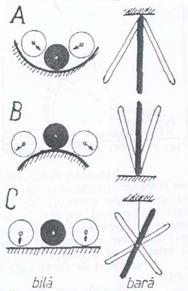
Fig. 56. (a, b, c) Starile de echilibru
b. vom spune ca un corp se afla in stare de echilibru static instabil, daca, fiind scos din pozitia de echilibru de o forta perturbatoare, nu mai poate reveni singur la starea initiala , amplificand perturbatia.
Exemplu: o bila asezata pe o suprafata convexa sau o bara asezata in pozitie verticala pe o suprafata plana (vezi Fig. 56.B.).
c. vom spune ca un corp se afla in stare de echilibru static indiferent, daca, fiind scos din pozitia de echilibru de o forta perturbatoare, ramane in noua stare, oricare ar fi aceasta.
Exemplu: o bila asezata pe o suprafata plana sau o bara agatata in centrul de greutate (vezi Fig. 56.C.).
B. Echilibrul dinamic
a. un corp se gaseste in starea de echilibru dinamic stabil cand, fiind scos de o forta perturbatoare de pe traiectoria pe care o urmeaza cu viteza constanta, revine singur la elementele initiale ale miscarii.
b. un corp se gaseste in starea de echilibru dinamic instabil cand, fiind scos de o forta perturbatoare de pe traiectoria pe care o urmeaza cu viteza constanta, nu mai poate reveni singur la elementele initiale ale miscarii, amplificand perturbatia.
c. un corp se gaseste in starea de echilibru dinamic indiferent cand, fiind scos de o forta perturbatoare de pe traiectoria pe care o urmeaza cu viteza constanta, ramane pe noua traiectorie, tot cu viteza constanta.
2. Stabilitatea planorului
Intrucat aeronavele se deplaseaza in spatiul tridimensional si fortele perturbatoare actioneaza in acest context; vom considera urmatorul sistem ortogonal de axe atasat, cu originea in centrul de greutate al planorului (vezi Fig. 21.57.).
- x x' = axa longitudinala (de ruliu);
- y y' = axa transversala (de tangaj);
- z z' = axa verticala (de giratie) si ne vom referi la:
- stabilitatea longitudinala (in jurul axei de tangaj);
- stabilitatea transversala (in jurul axei de ruliu);
- stabilitatea verticala (in jurul axei de giratie).
2.1. Stabilitatea longitudinala
A. Stabilitatea longitudinala statica
Vom spune ca un planor este stabil longitudinal static, daca la aparitia unui factor perturbator (de exemplu variatia incidentei aripii) care roteste aeronava in jurul axei de tangaj, apare, fara interventia pilotului, un moment stabilizator ce readuce planorul in pozitia initiala.
Asa cum observam si in Fig. 58., in timpul zborului planat cu viteza constanta, momentul fortei portante a aripii fata de centrul de greutate CG al planorului este echilibrat de momentul fortei portante a ampenajului orizontal fata de acelasi CG.
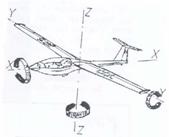
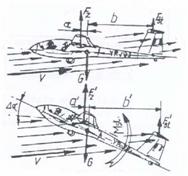
Fig. 57. Axele planorului Fig. 58. Stabilitatea longitudinala
Datorita actiunii unui factor perturbator (posibil o rafala orizontala sau verticala), se va modifica forta portanta pe aripa si ampenaj (prin modificarea unghiului de incidenta sau a vitezei) deci si echilibrul momentelor, aeronava rotindu-se in jurul axei de tangaj. Daca este indeplinita conditia de stabilitate statica longitudinala, momentul creat de portanta ampenajului orizontal va fi mai mare si va tinde sa readuca planorul in pozitia initiala:
M stabilizator = Fst b - Fz a
Din cele aratate mai sus reiese importanta pozitionarii centrului de greutate. Daca acesta se gaseste prea in spate este posibil ca la aparitia unei perturbatii, momentul portantei aripii sa nu mai poata fi echilibrat, fapt care duce la evolutii necontrolate, in limita de viteza. Dimpotriva, daca pozitia sa este prea inaintata, stabilitatea este prea mare si planorul devine lenes in comenzi.
B. Stabilitatea longitudinala dinamica
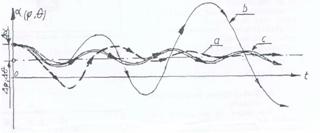
Fig. 59. Stabilitatea longitudinala dinamica
Sa urmarim ce se intampla in timp, dupa aparitia momentului stabilizator.
Planorul va tinde sa ramana in pozitia initiala, dar, din cauza inertiei, va efecuta niste oscilatii amortizate pana la recapatarea traiectoriei de echilibru, in cazul in care este si stabil dinamic. (vezi Fig. 59.a.).
Daca in loc sa se amortizeze, oscilatiile se amplifica, cu toate ca este stabil static, planorul este instabil dinamic (vezi Fig. 59.b.), iar daca oscilatiile raman constante, echilibrul este dinamic indiferent (vezi Fig. 59.c.).
2.2. Stabilitatea transversala
Stabilitatea statica in jurul axei de ruliu este asigurata in principal prin doua elemente constructive:
a. unghiul diedru al aripii d:
F'z2 > F'z1
a2 > a1
F'z2 a2 > F'z1 a1
La aparitia unei perturbatii care are ca rezultat inclinarea planorului pe o aripa, din cauza unghiului diedru, momentul componentei verticale a portantei semiplanului care coboara, fata de CG, este mai mare decat cel al componentei verticale a portantei semiplanului care urca (vezi Fig. 60.)
Apare deci un moment stabilizator de ruliu:
Ms ruliu = F'z2 a2 - F'z1 a2
cu specificatia ca momentele create de componentele F'z sunt neglijabile in raport cu cele create de componentele F'z.
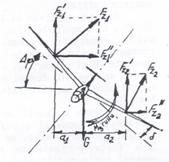
Fig. 60. Stabilitatea transversala
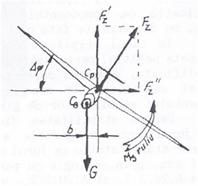
Fig. 61.
b. pozitia mai coborata a centrului de greutate fata de centrul de presiune:
La aparitia unei perturbatii care are ca rezultat inclinarea planorului pe o aripa, apare un decalaj pe orizontala intre CG si CP, dand nastere astfel unui cuplu de forte stabilizator (vezi Fig. 61.):
Ms ruliu = F'z b
De remarcat ca momentul stabilizator de ruliu este cu atat mai mare cu cat CG este mai coborat.
Stabilitatea dinamica transversala in jurul axei de ruliu pentru un planor stabil static transversal este prezentata prin analogie cu cea longitudinala in Fig. 59., unde se inlocuieste variatia incidentei Da cu variatia inclinarii Dj
2.3. Stabilitatea in jurul axei de giratie
Stabilitatea statica in jurul axei de giratie este asigurata in principal de:
a. ampenajul vertical:
Daca, datorita unor perturbatii exterioare, planorul executa o rotatie Dq in jurul axei de giratie, incidenta ampenajului vertical fata de directia de zbor va fi diferita de 0 si in consecinta va apare o forta portanta care va crea la randul ei un moment stabilizator de giratie (vezi Fig. A.62.).
Ms giratie = Fa d unde:
d = distanta de la CG al planorului la CP al ampenajului vertical.
b. unghiul de sageata pozitiv al aripilor, c.
Datorita unghiului de sageata pozitiv, se observa usor ca proiectiile frontale ale semiplanurilor (pe un plan perpendicular pe viteza) sunt inegale. Rezistenta la inaintare corespunzatoare ca si momentele componentelor fata de centrul de greutate al planorului vor fi de asemenea inegale, generand astfel un moment stabilizator de giratie (vezi Fig. 63.).
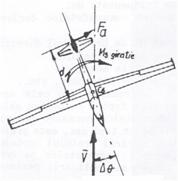
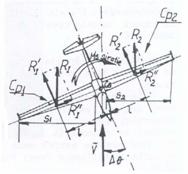
Fig. 62. Stabilitatea de giratie Fig. 63
Ms giratie = R'1l - R'2l, unde:
S1 > S2 R1 > R2 R'1 > R'2
- S1 si S2 sunt proiectiile frontale ale semiplanurilor, iar
- l este distanta de la CP al semiplanului la CG al planorului cu specificatia ca componentele R'1 si R'2, nu dau momente fata de CG.
In cazul aripii cu unghi de sageata negativ, perturbatia Dq este amplificata, momentul care apare in acest caz fiind de sens contrar momentului stabilizator de giratie.
Pentru stabilitatea dinamica in jurul axei de giratie a unui planor stabil static in jurul aceleiasi axe, prin analogie cu paragrafele 2.1. si 2.2., vom folosi din nou Fig. 59, cu ordonata renominalizata corespunzator in q
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
