
Deplasarea autovehiculelor apare ca efect al utilizarii energiei dezvoltate de motor, transmisa la rotile motoare. Caracterul miscarii este determinat de marimea si sensul fortelor care actioneaza asupra autovehiculului: forta de tractiune, rezistentele la inaintare, reactiunile normale ale drumului.
La deplasarea autovehiculelor cu viteza constanta (miscare uniforma), forta de tractiune este egala cu suma tuturor rezistentelor la inaintare. In cazul demarajului autovehiculului (accelerare), forta de tractiune depaseste rezistentele la inaintare, iar surplusul de energie dezvoltata de motor se utilizeaza la accelerarea vehiculului si se acumuleaza ca energie cinetica. In procesul de franare, forta de tractiune este inlocuita de forta de franare (controlata de conducator), care impreuna cu rezistentele la inaintare, va produce o decelerare a autovehiculului. Energia cinetica acumulata este consumata in frane si la invingerea rezistentelor la inaintare.
Fortele care actioneaza asupra unui autovehicul sunt [18]:
FR - forta la roata;
Fr - rezistenta la rulare;
Fp - rezistenta la urcarea rampei;
Fa - rezistenta aerului.
Schema fortelor de rezistenta care actioneaza asupra unui autovehiculul este prezentata in Figura . .
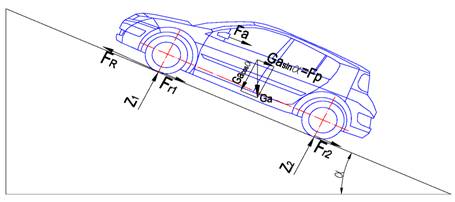
Figura : Schema rezistentelor la inaintarea autovehiculului
Rezistenta la rulare Fr si rezistenta aerului Fa, sunt intotdeauna forte care se opun miscarii autovehiculului. Rezistenta la urcarea rampei Fp se opune miscarii numai la urcare, iar la coborarea pantei devine forta activa.
Rezistenta totala la inaintare in timpul deplasarii autovehiculului este invinsa de forta la roata FR si marimea acesteia determina acceleratia imprimata autovehiculului:
![]() (ec.
. )
(ec.
. )
in care: a este acceleratia, iar map este masa aparenta (din cauza pieselor aflate in miscare de rotatie, precum volantul si rotile, autovehiculul se comporta ca si cum ar avea o masa mai mare).
Studiul performantelor autovehiculelor se face cu ajutorul ecuatiei generale de miscare, bilantului de tractiune, caracteristicii dinamice, caracteristicii de acceleratie, bilantului de puteri [1], [ ], [ ], [ ], [ ], [ ]. Pe baza ecuatiei generale de miscare se obtin parametrii si indicii caracteristici deplasarii in regim de accelerare si franare.
Ecuatia generala de miscare a autovehiculului se obtine aplicand legea a II-a a dinamicii (a lui Newton) si se poate scrie sub forma [
![]() (ec.
. )
(ec.
. )
unde:
a - acceleratia autovehiculului (m/s
v - viteza autovehiculului (m/s);
t - timpul (s);
FR - forta la roata (N);
Fr - rezistenta la rulare (N);
Fp - rezistenta pantei (N);
Fa - rezistenta aerodinamica (N);
m - masa autovehiculului (kg);
coeficientul de influenta a maselor in miscare de rotatie (masa aparenta map=m
Rezistenta la rulare Fr, rezistenta la urcarea rampei Fp si rezistenta aerului Fa actioneaza asupra autovehiculului atat in regim de viteza constanta cat si in regimurile tranzitorii de demarare si franare. Acestea nu depind de caracterul miscarii.
Rezistenta la demarare este cauzata de inertia masei autovehiculului in miscarea de translatie si inertia pieselor in miscare de rotatie. Inertia pieselor aflate in miscare de rotatie (volant, roti dintate, arbori, roti motoare si nemotoare) se manifesta ca o masa suplimentara a autovehiculului.
![]() (ec.
. )
(ec.
. )
unde δ este coeficientul maselor in miscare de rotatie si ia in considerare influenta acestor mase asupra miscarii autovehiculului, iar map este masa aparenta a autovehiculului.
Valoarea coeficientului maselor in miscare de rotatie d se poate determina cu ajutorul unor relatii empirice de forma:
![]() (ec.
. )
(ec.
. )
unde icv este raportul de transmitere din cutia de viteze.
Rezistenta aerului Fa este o forta paralela cu suprafata drumului, care actioneaza asupra autovehiculului in sens opus miscarii lui si se considera aplicata intr-un punct situat in planul longitudinal, punct denumit centru de presiune frontal [ ], [ ], [ ].
Liniile de curent ce se formeaza la deplasarea autovehiculului nu se inchid, scurgerea in zona din spate a caroseriei fiind turbionara, iar presiunile din zona anterioara caroseriei sunt superioare celor din zona posterioara. Rezultanta acestor diferente de presiune pe directia si in sensul curentului formeaza rezistenta aerului cauzata de presiune. Marimea acestei forte rezistente depinde de forma caroseriei. Fortele de frecare dintre aer si suprafata caroseriei dau o componenta pe directia de inaintare, care poarta denumirea de rezistenta cauzata de frecarea aerului cu suprafata. Suma acestor doua forte rezistente formeaza rezistenta aerului.
La vitezele cu care se deplaseaza autovehiculele, rezistenta exercitata de aer asupra unui corp in miscare este proportionala cu densitatea aerului ρ, cu suprafata frontala S a corpului si cu patratul vitezei de deplasare va
![]() (ec.
. )
(ec.
. )
in care cx este denumit coeficient de rezistenta aerodinamica.
Expresia puterii consumate pentru invingerea rezistentei aerului este:
![]() (ec.
. )
(ec.
. )
Coeficientul de rezistenta a aerului cx reprezinta influenta formei autovehiculului asupra rezistentei la inaintare si se determina experimental. Pentru autoturismele moderne, valorile uzuale sunt cuprinse intre 0.3 si 0.35 sau intre 0.35 si 0.45 pentru SUV-uri.
Rezistenta la rulare Fr este o forta cu actiune permanenta, determinata de pierderile de energie cauzate de rularea rotii elastice pe suprafete tari sau deformabile [2], [ ]. Este o forta care se opune deplasarii autovehiculului.
Cauzele acestei rezistente la inaintare sunt: deformarea pneului, deformarea caii de rulare, frecarile dintre pneu si cale, frecarile din lagarele rotilor si altele. Rezistenta la rulare depinde de mai multi factori, cum sunt: constructia pneului, viteza de deplasare, presiunea aerului din pneu, fortele si momentele care actioneaza asupra rotii.
Rezistenta la rulare pentru o roata depinde de reactiunea normala la roata Zi si de coeficientul de rezistenta la rulare fi
![]() (ec.
. )
(ec.
. )
Pentru intregul autovehicul rezistenta la rulare este data de suma rezistentelor la rulare pe toate rotile:
![]() (ec.
. )
(ec.
. )
unde:
fi - este coeficientul de rezistenta la rulare pentru roata i;
Zi - reactiunea normala la roata i;
n - numarul rotilor.
Pe un drum inclinat cu un unghi a rezistenta la rulare Fr a unui automobil se calculeaza cu relatia:
![]() (ec.
. )
(ec.
. )
in care f este un coeficient mediu de rezistenta la rulare.
Puterea necesara pentru invingerea rezistentei la rulare in cazul autovehiculelor singulare se calculeaza cu relatia:
![]() (ec.
. )
(ec.
. )
unde va este viteza de deplasare a autovehiculului.
Pentru determinarea rezistentei la rulare trebuie stabilit mai intai coeficientul de rezistenta la rulare. Acesta depinde de un numar mare de factori, fiind dificila elaborarea unei metode teoretice general valabile de calcul a coeficientului de rezistenta la rulare. Din aceasta cauza, coeficientul de rezistenta la rulare se determina pe cale experimentala. Pe baza rezultatelor obtinute prin experimente au fost propuse o serie de relatii empirice.
Cele mai simple dintre relatiile empirice recomandate in literatura de specialitate pentru stabilirea coeficientului de rezistenta la rulare tin seama de viteza de deplasare.
O relatie generala are forma polinomiala:
![]() (ec.
(ec.
unde f , f , f si f sunt coeficientii de rezistenta la rulare specifici diferitelor puteri ale vitezei.
Conform literaturii de specialitate, pe o sosea de asfalt sau beton, in stare buna, valoarea coeficientului de rezistenta la rulare pentru un autoturism (cu pneuri de joasa presiune), este de 0.0120.018.
Greutatea unui autovehicul poate fi descompusa intr-o componenta normala pe drum si una paralela cu drumul. La urcare, componenta paralela cu drumul se numeste rezistenta la urcarea rampei [2], [ ], [ ]. Considerand unghiul α al pantei pozitiv la urcare si negativ la coborare, la coborarea pantei componenta paralela cu drumul devine forta activa. Expresia rezistentei la urcarea rampei este:
![]() (ec.
. )
(ec.
. )
unde Ga este greutatea autovehiculului, iar α este unghiul de inclinare a drumului.
Expresia puterii corespunzatoare rezistentei pantei, la urcarea sau coborarea unui drum inclinat este:
![]() (ec.
. )
(ec.
. )
Daca drumul are inclinarea mai mica de 7°, se poate considera:
![]() (ec.
. )
(ec.
. )
unde h este inaltimea rampei, corespunzatoare unei lungimi orizontale l.
Atunci cand l=100, raportul h/l reprezinta numeric inclinarea drumului in procente h%. In acest caz rezistenta la urcarea rampei poate fi scrisa sub forma:
![]() (ec.
. )
(ec.
. )
Rezistenta la rulare si rezistenta la urcarea rampei depind in principal de caracteristicile drumului (inclinarea si starea acestuia). Suma rezistentelor la rulare si la urcarea rampei Fr+p reprezinta rezistenta totala a drumului.
Masurarea statica a profilului unui drum este cel mai usor de realizat, in acest scop putand fi utilizate instrumente specifice topografiei si geodeziei. Masurarea cu instrumente de masura a lungimilor (de exemplu roata de masura, sau ruleta de mare lungime) nu este suficienta pentru a masura inclinarea - e necesara si masurarea altitudinii sau a diferentei de nivel. Instrumentele principale utilizate pentru masurarea (statica) a diferentelor de nivel (si implicit a inclinarii drumului) sunt nivela si statia totala.
In esenta, o nivela cuprinde un telescop care se roteste pe o axa verticala; este utilizat pentru a crea o linie de vizare orizontala astfel incait sa poata fi determinate diferentele de inaltime si sa poata sa fie efectuate jalonarile (Figura 2. ).

Figura : Exemple de nivele automate (electronice) utilizate in geodezie
Nivelele pot fi de asemenea echipate cu un cerc orizontal, care este foarte util pentru trasarea unghiurilor drepte, de exemplu in timpul inregistrarii profilurilor transversale ale drumurilor. Suplimentar, nivelele pot fi utilizate pentru a determina optic distantele, cu o acuratete de pana la 0.1 - 0.3 metri.
O statie totala (Figura 2. ) este compusa dintr-un teodolit cu un aparat de masurat cu distomat incorporat si astfel poate sa masoare unghiuri si distante in acelasi timp. Statiile totale electronice moderne sunt toate prevazute cu un aparat de masurat distanta opto-electronic (EDM) si cu scanare electronica a unghiuirilor. Scalele codate ale cercurilor orizontale si verticale sunt scanate electronic, dupa care unghiurile si distantele sunt afisate digital.

Figura : Exemplu de statie totala
Distanta orizontala, diferenta de inaltime si coordonatele sunt calculate automat si se pot inregistra toate masuratorile si informatiile suplimentare. Statiile totale se pot utiliza pentru a determina distante, unghiuri, diferente de nivel sau pur si simplu pozitia.
Pentru a descrie pozitia unui punct sunt cerute doua coordonate. Coordonatele polare au nevoie de o linie si de un unghi. Coordonatele carteziene au nevoie de doua linii in cadrul unui sistem ortogonal. Statia totala masoara coordonatele polare; acestea sunt recalculate ca fiind coordonate carteziene fie in cadrul sistemului ortogonal dat, fie in cadrul instrumentului insusi sau ulterior, prin post-procesare.
O metoda moderna de masurare este prin utilizarea statiilor GPS geodezice, care asigura o precizie de localizare de +/- 3 cm. Cand se urmareste masurarea distantelor si unghiurilor relative, precizia se poate asigura prin utilizarea unui sistem RTK (Real-Time Kinematic) care asigura o asemenea precizie folosind o statie fixa (master) si una mobila (rover), fara a fi necesare alte corectii externe, costisitoare. Acelasi principiu este utilizat si in aplicatii de ghidare a utilajelor in ingineria civila, sau in agricultura.
Prin masurare statica se intelege, in acest context, pozitionarea aparatului de masura intr-un punct fix si masurarea distantei pana la (sau a unghiului fata de) un alt punct fix.
Masurarea dinamica presupune culegera informatiilor in timpul deplasarii, parcurgand drumul masurat cu un vehicul.
In timpul deplasarii, datele referitoare la pozitie se pot inregistra utilizand aparatura instalata la bordul autovehiculului. Pentru a masura lungimea unui trasu parcurs metoda cea mai simpla este urmarirea contorului de distanta al automobilului, sau masurarea vitezei si a timpului (dar este mai simplu sa se determine viteza in functie de spatiul parcurs, decat invers). Folosind senzori inertiali (accelerometre) se poate determina acceleratie pe cele 3 axe, apoi prin integrare (in functie de timp) se poate calcula viteza pe fiecare axa si prin inca o integrare se poate determina distanta relativa pe cele 3 directii, parcursa intre doua inregistrari. Aceasta metoda este insa destul de dificila si presupune si o calibrare a senzorilor. O alta posibilitate este utilizarea unui scaner laser 3D, care ar putea construi o harta 3D a mediului inconjurator. Aceasta solutie este insa extrem de costisitoare si presupune si un efort mare de prelucrare a datelor.
O metoda simpla, accesibila si suficient de precisa consta in utilizarea receptoarelor GPS instalate la bordul vehiculelor. Receptoarele GPS pot fi utilizate in sistem RTK (Real-Time Kinematic), cand se foloseste si o statie de referinta, fixa sau mobila. Cel mai simplu este sa fie utilizat un singur receptor, dar in acest caz exista rezerve in ce priveste acuratetea masurarilor.
In cazul in care se doreste numai determinarea profilului 2D (orizontal) al drumului, receptoarele GPS cu sensibilitate ridicata ofera o acuratete suficient de mare, dar nu in coordonate absolute.
Pentru a asigura o precizie suficienta si in 3D se pot utiliza receptoarele GPS in combinatie cu senzori inertiali sau cu senzori de presiune, utilizand presiunea barometrica pentru reducerea erorilor de pozitionare prin GPS, care sunt destul de mari in cazul altitudinii. Trebuie mentionat totusi ca valoarea altitudinii raportata de un receptor GPS, chiar si cu compensare barometrica, nu este valoarea absoluta, ci o valoare relativa fata de altitudinea de referinta a sistemului de proiectie utilizat (in Romania sistemul Stereo70, avand ca altitudine de referinta nivelul Marii Negre).
Sistemele GNSS (Global Navigation Satellite Systems), sau sistemele globale de navigare cu ajutorul satelitilor, permit determinarea cu precizie a pozitiei intr-un sistem de referinta geocentric, in orice punct de pe glob, cu ajutorul retelelor de sateliti artificiali: Navstar-GPS (SUA), Glonass (Rusia) si Galileo (Europa).
Dintre cele trei sisteme, Galileo este inca in faza de testare, Glonass este functional dar cele mai multe receptoare existente pe piata nu receptioneaza si frecventele pe care emit satelitii din acest sistem, iar GPS este cel mai utilizat, inclusiv in Romania.
Sistemul GPS (Global Positioning System) este un sistem de determinare a pozitiei pe glob (mai corect: pe un geoid de referinta) cu ajutorul satelitilor. Sistemul a fost destinat initial doar aplicatiilor militare, dar treptat a devenit disponibil si pentru aplicatii civile, la inceput cu o precizie alterata intentionat (disponibilitate selectiva), dar acum precizia oferita este foarte buna. Numarul de utilizatori este teoretic nelimitat, sistemul fiind pasiv - aparatele utilizatorilor sunt numai receptoare, nu si emitatoare de semnal. Sistemul GPS este format din trei componente: segmentul spatial, segmentul de control terestru si segmentul utilizatorilor.
Segmentul spatial este format din satelitii care transmit informatiile de pozitie. Pentru a acoperi orice pozitie posibila de pe glob sunt necesari cel putin 24 de sateliti. In aceste conditii, in orice moment, in orice punct de pe glob ar trebui sa fie vizibili intre 4 si 10 sateliti. Numarul actual al satelitilor functionali este mai mare de 24 - sistemul a fost declarat oficial complet functional in 1995, iar in anul 2001 erau deja functionali 29 de sateliti [25]. Acesti sateliti, aflati pe orbite circulare, sunt plasati pe sase plane orbitale inclinate la 55 de grade, la o altitudine de 20200 km. Ei au o perioada de revolutie de aproximativ 12 ore si o viteza de circa 3,9 km/s. Satelitii sunt echipati cu ceasuri atomice si doua emitatoare radio in banda D. Cele doua frecvente purtatoare sunt f1=1575,42 MHz si f2=1227,6 MHz. Semnalele sunt emise in tehnica spectrului imprastiat si utilizeaza doua coduri pseudoaleatoare: un cod C/A (Coarse Acquisition) pe frecventa f1 si un cod P (Precise) pe frecventele f1 si f2 [ ].
Segmentul de control terestru transmite parametrii de amplasare, controleaza traiectoriile si datele emise si modifica orbitele satelitilor. Acest segment cuprinde o statie principala (master) de control situata in SUA si o retea de statii de monitorizare si control raspandite pe glob. Pozitiile acestor statii sunt cunoscute cu precizie foarte mare. Datele colectate de statiile de monitorizare de la sol sunt transmise statiei master pentru procesare. Rezultatele procesarii includ pozitiile satelitilor in functie de timp, almanahul satelitilor (care contine informatii despre pozitiile curente ale satelitilor), date atmosferice, parametrii ceasurilor satelitilor si altele. Aceste date sunt transmise satelitilor prin intermediul statiilor de control.
Segmentul utilizatorilor este constituit din receptoarele GPS care capteaza simultan semnale provenite de la sateliti, decodifica datele si calculeaza solutia ecuatiei de navigatie, PVT (Pozitie, Viteza, Timp). Pentru a obtine aceasta solutie, este necesara utilizarea a cel putin patru sateliti care trimit parametrii de navigatie astfel incat se permite calculul distantelor dintre fiecare satelit si receptorul GPS [5].
Cu ajutorul unui receptor GPS instalat pe un autovehicul se poate determina pozitia acestuia pe glob. Determinarea pozitiei prin GPS poate fi afectata de multe erori, cum sunt: imprecizia orbitei, abateri accidentale de la orbita, timp inexact, pozitia relativa nefavorabila a satelitilor vizibili, abateri ale undei radio de la traiectoria teoretica din cauza mediului neomogen pe care-l strabate sau erori de pozitionare. Din aceste cauze, coordonatele absolute ale unui punct de pe suprafata terestra se determina cu precizie de ordinul metrilor. Se pot determina cu precizie ridicata (centimetri sau milimetri) coordonatele relative ale punctelor masurate simultan, cu aceeasi configuratie de sateliti (dar pe cat posibil in camp deschis, pentru a reduce la minim erorile datorate reflexiilor), intrucat erorile se anuleaza reciproc.
.. de completat .
.. de completat .
Datele necesare prezentului studiu au fost colectate in principal prin inregistrarea pozitiei vehiculului cu ajutorul dispozitivelor GPS, in timpul deplasarii pe segmentul de drum ce trebuia analizat.
In timpul deplasarii, datele referitoare la pozitie se pot inregistra utilizand aparatura instalata la bordul autovehiculului. Cand scopul masuratorilor este determinarea pozitiilor succesive, viteza de deplasare nu este importanta, studiile ([8], [ ]) aratand ca viteza vehiculului nu influenteaza calitatea datelor inregistrate.
.. de completat .
Pregatirea vehiculului martor [5] consta in instalarea echipamentelor de achizitie a datelor. In cazul receptoarelor GPS, in functie de tipul receptorului, instalarea cea mai complexa consta in asezarea antenei magnetice pe acoperisul vehiculului, conectarea la calculator si pornirea aparatelor si a aplicatiilor. Cazul cel mai simplu consta in utilizarea unui receptor de tip logger, adica un receptor ce include o memorie nevolatila pe care sunt inregistrate datele traseului parcurs (coordonate geografice si timp).
Colectarea datelor se realizeaza prin parcurgerea (in mod repetat) cu autovehiculul a unor trasee prestabilite. Traseele si sistemele de achizitie a datelor se aleg in functie de scopul urmarit prin prelucrarea datelor respective.
Aparatura disponibila la laboratorul "SATREPA" de la Departamentul de Autovehicule si Transporturi al Universitatii Transilvania cuprinde urmatoarele sisteme de masurare / achizitie de date bazate pe receptoare GPS (care pot fi utilizate efectiv la determinarea profilului 3D al unui drum):
sistem de masurare dual, tip RTK, Leica SR-20;
sistem de achizitie de date dinamice VBox III;
receptor GPSmap 60CSx;
sistem de achizitie de date DS-5;
Trek-550 (In-Vehicle Computing Box).
Caracteristicile principale ale acestor sisteme sunt prezentate in continuare, iar acele echipamente care au fost efectiv utilizate in experimente de determinare a pantei sunt prezentate mai detaliat.
Sistemul SR20 [26] produs de Leica este un sistem destinat efectuarii de masurari geodezice, cu o singura frecventa de lucru, capabil sa ofere soluții de post-procesare cu precizie de ordinul centimetrilor, utilizand sisteme de corectie in timp real cum sunt WAAS și EGNOS. Este conceput cu un flux de lucru intuitiv si ușor de invațat și de folosit.

Figura : Leica SR20
Caracteristici cheie:
Motor GPS puternic, care ofera rezultate precise de ordinul centimetrilor.
Sistemul flexibil pentru a sprijini o mare varietate de aplicatii si cerințe GIS.
Aplicatii de topografie și transformarile de coordonate.
Software Leica Geo-Office pentru post-procesare.
SR-20 este livrat de catre producator ca pachet cu un receptor sau cu doua receptoare. Laboratorul "SATREPA" detine un sistem cu doua receptoare, ce permite utilizarea functiei RTK pentru masurari precise ale aliniamentului drumului, inclusiv pentru determinarea unghiurilor de inclinare.
Racelogic Vbox III (Figura 3. ) [ ] este un dispozitiv profesional capabil sa inregistreze si sa proceseze in timp real semnalele receptionate de la o antena GPS cu o rata de actualizare a datelor de la receptor de 100 Hz. Este destinat in primul rand masurarii pozitiei si vitezei unui vehicul in miscare.

Figura : Racelogic VBox
Pe langa datele furnizate in mod normal de un receptor GPS, VBox poate sa calculeze si sa inregistreze in fisierele de iesire (cu extensie .vbo si format propriu) distanta parcursa, acceleratia si alte valori.
Prin posibilitatile de conectare cu diverse module externe, pot fi achizitionate si alte date; de exemplu, Vbox ofera posibilitatea de conectare cu magistrala CAN a autovehiculului sau cu accelerometre. Vbox III este foarte usor de instalat si inregistreaza informatiile culese pe un card CompactFlash, iar optional poate afisa datele in timp real pe ecranul unui calculator. Senzorul Vbox III asigura o acuratete care permite masurarea distantei de franare cu ABS cu o precizie de ±5 cm. Caracteristicile de rezolutie si acuratete a datelor sunt prezentate in Tabelul . Pentru a obtine aceste valori sunt necesare conditii optime de receptie (vizibilitate, numar de sateliti).
Sistemul este insotit de o aplicatie software (pentru Windows) care asigura atat prelucrarea in timp real a datelor receptionate de la senzorul GPS, cat si post-procesarea acestora - generarea de grafice si rapoarte; aplicatia include si o functie de filtrare Kalman.
Tabelul : Caracteristici de precizie ale sistemului Vbox III
|
Parametru |
Rezolutie |
Acuratete |
Acuratete cu DGPS |
|
Viteza |
0.01 km/h |
0.1 km/h |
0.1 km/h |
|
Distanta |
1 cm |
||
|
Pozitia absoluta |
1 cm |
1.8 m 95% CEP* |
|
|
Altitudinea |
1 cm |
6 m 95% CEP* |
3 m 95% CEP* |
|
Acceleratia laterala |
0.01 g |
||
|
Acceleratia longitudinala |
0.01 g |
||
|
Directia/orientarea |
|||
|
Timpul |
0.01 s |
0.001 s |
0.001 s |
Parametrii pe care Vbox ii poate masura numai pe baza semnalului GPS, fara alti senzori externi, sunt: viteza, distanta, timpul, pozitia, directia de inaintare (orientarea), inaltimea, acceleratia laterala, acceleratia longitudinala, viteza verticala, raza de virare, pozitia intr-un circuit, traseul parcurs (inregistrare), distanta parcursa in rulare libera.
Generatorul de rapoarte realizeaza calcule si creeaza tabele complexe in timp real sau dupa colectarea datelor, pe baza inregistrarilor din fisierele vbo. Traseele inregistrate pot fi exportate in formate acceptate de programele de cartare sau Google Earth. Un exemplu de prelucrare grafica a datelor inregistrate este in Figura . - reprezentarea 3D a unui traseu parcurs.

Figura : Exemplu de circuit inregistrat cu Vbox, reprezentat in 3D (imagine preluata de pe site-ul producatorului: https://www.racelogic.co.uk
Sistemul Vbox cu doua antene VBS20SL poate masura in plus: unghiul de deriva, unghiul de tangaj, unghiul de ruliu, unghiul de giratie, viteza laterala. VBS20SL este un dispozitiv capabil sa inregistreze si sa proceseze in timp real semnalele receptionate de la doua antene, cu o rata de esantionare de 20 Hz.
Receptorul GPS Garmin GPSmap 60CSx este un dispozitiv care poate inregistra datele cu o rata de esantionare de 1 Hz (o inregistrare pe secunda), oferind in acelasi timp si functii de navigare [ ], [ ].
Unitatea dispune de un microcard SD schimbabil pentru incarcarea in memorie a hartilor de detaliu si pentru salvarea traseelor parcurse. Are o carcasa robusta, etansa, rezistenta la apa. Locasul pentru introducerea microcardului SD este amplasat in interiorul compartimentului etans al bateriei. Utilizatorul poate incarca si descarca date despre harti si trasee/puncte inregistrate folosind conexiunea rapida USB. Unitatea dispune de un receptor GPS foarte sensibil, care receptioneaza semnalele de la satelit mai repede decat in cazul altor unitati similare si permite utilizatorului sa-si localizeze pozitia in conditii mai grele de utilizare, cum ar fi in padure sau in defilee. Unitatea GPSmap 60CSx incorporeaza, de asemenea, un altimetru barometric, pentru date precise privind elevatia, precum si o busola electronica ce afiseaza directia de deplasare cu mare acuratete.

Figura : Garmin GPSmap 60CSx
Caracteristici [5], [ ]:
receptor GPS de inalta sensibilitate, compatibil WAAS prin SiRF (SiRF este un protocol de comunicatie implementat in chipset-ul cu acelasi nume - produs de compania SiRF Technology Holdings Inc.);
antena de receptie quad-helix incorporata si cu posibilitatea racordarii unei antene exterioare;
dimensiuni: 2,4x6,1x1,3";
ecran: 1,5x2,2", diagonala 2,6", 256 culori, TFT ( 160x240 pixeli);
greutate: 213 grame, cu baterii;
compas electronic (busola), care afiseaza cu exactitate directia, atunci cand utilizatorul sta pe loc;
altimetru barometric cu afisarea automata a tendintei de variatie a presiunii;
locas pentru microcard SD - acesta inmagazineaza detaliile (optional) din MapSource si traseele parcurse (format gpx);
durata de viata a bateriei: 18 ore (utilizare normala), prin folosirea a doua baterii AA alcaline;
formate de pozitie Lat/Lon, UTM, Loran TDs, Maidenhead, MGRS;
alarme audio pentru waypoint-uri de proximitate si ceas;
optiune de caractere mari pentru o vizualizare usoara; mod dual de afisare a pozitiei;
calculator de calatorie, prevazut cu odometru (kilometraj), timp de oprire, media de deplasare, media totala, timpul total, viteza maxima si altele;
inregistrare automata a traseului parcurs cu 10.000 de puncte; cele 20 de trasee salvate (cu cate 500 de puncte fiecare) permit ghidarea in ambele directii;
calculator de elevatie, care ofera elevatia curenta, rata de ascensiune/coborare, elevatia minima/ maxima, ascensiunea/ coborarea totala, rata de ascensiune/ coborare medie si maxima (aplicatii pentru aviatie, parapanta);
instructiunile de navigatie pot fi divizate cu repetoare, plotere si autopilot folosind protocoale NMEA printr-un port serial;
rezistenta la apa: IEC 60529 IPX7.
Sistemul de achizitie a datelor DS-5 este un sistem original, dezvoltat in cadrul Departamentului de Autovehicule si Transporturi al Universitatii Transilvania, compus dintr-un receptor GPS 18x-5Hz (produs de Garmin) si un calculator (uzual un mini-notebook) pe care este instalat un program dezvoltat special pentru achizitia de date de la receptoare GPS. Conexiunea se realizeaza prin interfata seriala (utilizand un circuit/cablu de adaptare RS232-USB daca este necesar).
GPS 18x-5Hz (Figura 3. , caracteristici tehnice in Tabelul . ) este un senzor GPS destinat in special utilizarii la operarea utilajelor, ghidare si diferite aplicatii in agricultura unde sunt necesare informatii de pozitionare si viteza foarte precise [ ].

Figura : GPS 18x-5Hz
Tabelul Caracteristici tehnice ale receptorului GPS 18x-5Hz
|
Dimensiuni | |
|
Diametru |
61 mm |
|
Grosime |
19.5 mm |
|
Masa |
165 g |
|
Lungimea cablului |
5 m |
|
Caracteristici electrice | |
|
Tensiunea de alimentare |
4.0 - 5.5 Vcc |
|
Curentul de intrare |
100 mA @ 5.0 Vcc |
|
Sensibilitatea receptorului GPS |
-185 dBm |
|
Temperatura de operare |
-30°C +80°C |
|
Performante GPS | |
|
Timp de achizitie |
Reachizitie: sub 2 secunde Cu toate datele cunoscute: 1 secunda La cald (pozitia initiala, ora si almanahul cunoscute; efemeride necunoscute): 38 secunde La rece: 45 secunde. |
|
Rata de actualizare |
5 inregistrari pe secunda (5 Hz) |
|
Precizie |
SPS (standard positioning service): pozitie: sub 15 metri, 95% viteza: 0.1 noduri RMS. WAAS: pozitie: sub 3 metri, 95% viteza: 0.1 noduri RMS. |
|
Interfete |
RS-232 - receptor asincron, implicit 19200 bauds |
Pentru achizitia, prelucrarea si salvarea datelor receptionate cu ajutorul sistemului DS-5 (bazat pe GPS 18x-5Hz) se foloseste un program dedicat, ce permite salvarea interpretarea secventelor NMEA transmise de receptorul GPS si inregistrarea datelor de traseu cu o frecventa de 5 inregistrari pe secunda. Pentru aceasta interfeta seriala (RS-232) este configurata sa transfere date cu viteza de 19200 bps.
Interfata programului este prezentata in Figura 3. . Principalele zone din interfata cu utilizatorul sunt:
Data - afisarea in timp real a datelor receptionate de la senzorul GPS; cand nu exista semnal de la suficienti sateliti, coordonatele afisate sunt cele din memoria senzorului, iar ora este data de ceasul intern al senzorului;
Quality - informatii despre calitatea semnalului, adica numarul de sateliti vizibili si HDOP (Horizontal Dilution of Precision); cand este disponibil semnal diferential, mai apare in aceasta zona litera "D";
NMEA Strings - secventele NMEA preluate de la senzorul GPS; aceste siruri sunt afisate pentru a avea un control suplimentar al corectitudinii datelor, in etapa de dezvoltare a programului;
Zona grafica (zona alba din dreapta) - in aceasta zona este reprezentat in timp real graficul vitezei, atunci cand este activata inregistrarea datelor;
Zona de marcare (stanga-jos) - cuprinde butonul "Mark point", prin apasarea caruia se inregistreaza pozitia curenta si campul de editare "GEAR", unde se poate introduce treapta de viteza (caractere numerice, de la 0 pana la 6);
Zona de control (stanga-sus) - in aceasta zona se gasesc butoanele pentru configurare, conectarea la senzorul GPS si pornirea/oprirea inregistrarii; butoanele sunt suficient de mari pentru a putea fi utilizate cu usurinta pe un Tablet-PC cu touchscreen.
Datele sunt inregistrate in fisiere de tip text, cu un format particular, dar usor de utilizat cu alte programe (inclusiv Excel).
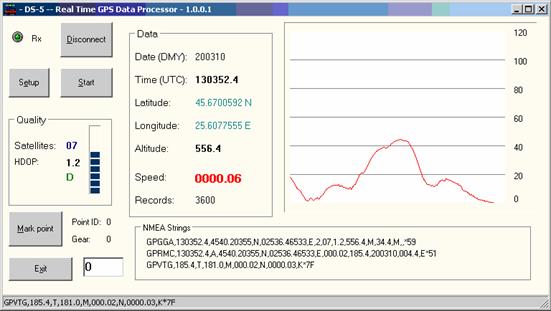
Figura : Interfata programului de achizitie a datelor DS-5
Sistemul Trek-550
.. de completat .
.. de completat .
.. de completat .
.. de completat .
.. de completat .
.. de completat .
.. de completat .
.. de completat .
.. de completat .
Campian, O.V., Ciolan, Gh.: Dinamica autovehiculelor. Editura Univ. Transilvania, Brasov 2001.
Ciolan, Gh., Preda, I.: Dinamica autovehiculelor - Partea I (pe CD). Universitatea "Transilvania" din Brasov, 2008.
Ciolan, Gh., Preda I., Baciu, A.: Aspecte ale modelarii miscarii transversale a automobilului. In: Materialele Conferintei Internationale "Sisteme de Transport si Logistica", p.61-68, Ed. Evrica, Chisinau, 2005.
Covaciu D., Florea D., Preda I., Timar J. Using GPS Devices for Collecting Traffic Data. "SMAT2008" International Conference, Craiova, Romania, 2008.
Covaciu, D., Solutii in studiul comportamentului dinamic si in trafic al autovehiculelor prin integrarea CAD/PLM si GPS, teza de doctorat, Universitatea Transilvania din Brasov, 2010.
Covaciu, D.; Preda, I.; Ciolan, Gh.; Campian, O.V.; Data acquisition system based on GPS technology, for vehicle dynamics analysis, CONAT 2010, Brasov, Transilvania University, 2010.
DePriest, Dale: A GPS User Manual. https://www.gpsinformation.org
Dima, D.S:, Covaciu, D.: Improved Methods to Measure and Generate 3D Road Profile in Concerning with Simulation Errors, Conferinta EVU2012, Brasov, 2012.
Dima, D.S:, Covaciu, D.: Method for Ascertaining the Road Slope with Application in Accident Reconstruction, Conferinta MVT2012, Timisoara, 2012.
El-Rabbany, Ahmed: Introduction to GPS: the Global Positioning System. Artech House Inc., ISBN 1-58053-183-0, 2002.
Florea D.: Managementul traficului rutier, Editia a II-a, Editura Universitatii "Transilvania din Brasov", 2000, ISBN 973 -9474-55-1.
Gillespie, Thomas-D.: Fundamentals of Vehicle Dynamics. SAE International, 1992.
Ispas, N; Soica, A; Dima, D; Proposal of New Versatile Devices for Uses in Traffic Accident Reconstruction, CONAT2010, Brasov, Transilvania University, 2010.
Miller, S., Youngberg, B., Millie, A.: Schweizer, P., Gerdes, C.: Calculating Longitudinal Wheel Slip and Tire Parameters Using GPS Velocity. Proceedings of the American Control Conference Arlington, June 25-27, 2001.
Mitscke, M.: Dynamik der Kraftfahrzeuge. Band A: Antrieb und Bremsung, Springer Verlag, New York, 1982.
Mitscke, M.: Dynamik der Kraftfahrzeuge. Band C: Fahrverhalten, Springer Verlag, New York, 1990.
Popp, K., Schiehlen, W.: Ground Vehicle Dynamics. Springer, 2010.
Preda, Ion: Dinamica autovehiculelor. Notite de curs. https://auto.unitbv.ro/moodle
Racelogic: VBOX Tools Software Manual. Ver. 1.4, https://www.racelogic.co.uk
Rajamani, Rajesh: Vehycle Dynamics and Control. Springer Science & Business, New York, 2006.
Untaru, M., Campian, V,. Ionescu, E.,. Peres, Gh., Ciolan, Gh., Todor, I., Filip, N., Campian, O.: Dinamica autovehiculelor. Universitatea Transilvania Brasov, 1988.
***, GPS 18x Technical Specifications, Rev.B, Jan. 2008, Garmin International, https://www.garmin.com
***, VBOX Tools Software Manual, Version 1.4, Racelogic, https://www.racelogic.co.uk
***, Garmin International, GPSmap 60CSx with sensors and maps, owner's manual. August 2007, https://www.garmin.com
***, Global Positioning Systems Wing (GPSW) System Engineering and Integration, Interface Specification IS-GPS-800. Science Application International Corporation, California, 2008, https://www.losangeles.af.mil/shared/media/document/AFD-081021-034.pdf
***, Leica SR20 User Manual - Single Frequency Survey Solution, https://www.leica-advantage.com.
|
Politica de confidentialitate |
| Copyright ©
2026 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |