Dupa anul 1990, controlul fuzzy s-a extins spectaculos in aplicatiile industriale, in principal datorita faptului ca permite inlocuirea tehnicilor bazate pe ecuatii diferentiale cu cele ale inteligentei artificiale, pastrand insa ca fundal fundamentele traditionale ale teoriei sistemelor si ingineriei reglarii automate. In plus, teorema de reprezentare a lui Kosko asigura certitudinea ca orice functie continua neliniara poate fi aproximata exact cu un set finit de variabile, valori si reguli fuzzy.
Controlul fuzzy are numeroase avantaje:
ofera metode de reprezentare si implementare a cunostintelor expertului uman pentru automatizarea de nivel inalt;
ofera calea pentru o implementare simpla a unor solutii de control neliniar robust in sisteme cu parametri variabili supuse unor perturbatii majore;
ofera un limbaj comun, atat pentru specialistii care identifica strategiile adecvate de control, cat si pentru cei care le implementeaza, scurtand de cateva ori timpul de proiectare;
investitiile necesare realizarii sistemelor de control fuzzy se pot recupera, in cele mai multe cazuri, doar in cateva luni;
Este de asteptat ca oferta de piata sa marcheze in curand si in sectorul industrial aceeasi tendinta ca in sectorul produsele de larg consum. In Japonia mai ales, acestea din urma sunt percepute de cumparatori ca fiind moderne, de inalta calitate si usor de utilizat, ceea ce le asigura o piata de cateva miliarde de dolari anual.
Intr-o abordare realista trebuie insa dat un raspuns si intrebarea privind limitele controlului fuzzy. Afirmatia ca un controler fuzzy ofera un inalt grad de automatizare pentru procese cu structuri complexe este adevarata numai daca sunt disponibile cunostinte relevante despre proces, iar acestea pot fi exprimate in formalismul logic fuzzy. Controlerele fuzzy sunt mai robuste decat cele conventionale, dar nu este inca pusa la punct o teorie unanim recunoscuta privind criteriile de stabilitate aplicabile acestor sisteme.
Domeniile de aplicabilitate se extind pe zi ce trece si estimeaza ca 10 -15 % din aplicatiile electrice si electronice ingineresti sunt controlate fuzzy, insa acolo unde s-au impus solutiile de reglare conventionale, inlocuirea acestora impune o abordare diferita a problemei (cunostinte, reguli de inferenta, multimi si operatori fuzzy in loc de functii de transfer si ecuatii diferentiale). Majoritatea aplicatiilor existente sunt pur software, procesoarele fuzzy specializate disponibile fiind inca putine. Proiectantul de sistem are nevoie de instrumente soft pentru testare, evaluare si acordare. Nu este inca suficient de clar daca raportul pret - calitate al produselor fuzzy este foarte bun. Utilizarea de hard specializat pentru control fuzzy se justifica numai pentru sisteme foarte rapide sau atunci cand costul acestuia este neglijabil in raport cu cel al instalatiei conduse. In celelalte cazuri, microcontrolerele, PLC-urilor clasice sau solutiile hibride sunt de preferat.
Pana acum au fost propuse diverse configuratii de reglare si numeroase tipuri de controlere fuzzy. Ne vom focaliza in continuare atentia pe studiul unei clase de controlere frecvent utilizate in aplicatii - controlerele fuzzy bazate pe cunostinte.
Un sistem bazat pe cunostinte (SBC) pentru control in bucla inchisa obtine performantele de reglare, fiabilitate si robustete prin prelucrarea datelor obtinute din experienta operarii manuale sau din alte mecanisme logice. Se disting doua clase de SBC-uri: cele utilizate in supervizarea functionarii buclei de reglare, complementar cu algoritmul conventional de reglare existent si cele care realizeaza direct operatiile de control, inlocuind total algoritmul conventional. Acesta este cazul ce va fi tratat mai departe in detaliu. Cu ajutorul unui SBC pot fi abordate urmatoarele categorii de aplicatii de control:
- un SBC pentru monitorizarea proceselor opereaza on-line asupra datelor, oferind operatorului de proces informatii in perspectiva temporala: detectarea deviatiilor de la conditiile normale de operare si a pericolului aparitiei unor eventuale avarii, analiza cauzelor unor alarme primare, stabilirea gradului de urgenta al unor actiuni de corectie in sistem, memorarea conditiilor de operare din trecut, in scopul utilizarii acestora fie in predictia unor actiuni viitoare, fie in recunoasterea situatiilor de eroare sau in obtinerea unor sugestii de rezolvare a unor situatii critice.
un SBC pentru diagnoza avariilor este un suport on-line pentru rezolvarea defectelor aleatoare sau a avariilor nesemnalizate in prealabil. El utilizeaza atat cunostintele euristice ale operatorului cat si pe cele de principiu, obtinute dintr-un model generic al procesului
un SBC pentru planificare si ordonantare preia sarcina de management al functionarii, care urmareste utilizarea cat mai eficienta a resurselor de productie. Planificarea pe termen scurt presupune stabilirea optima a sarcinilor de executat intr-un orizont de timp limitat, pe cand cea pe termen lung stabileste reconfigurarile si extensiile sistemului de control automat prin achizitionarea atat de cunostinte tehnice, cat si economice. Aplicatia tipica din industrie este fabricatia in loturi. Planificarea analitica a acesteia se face prin tehnicile de programare liniara sau dinamica, care nu pot include prescriptiile euristice sau calitative. De aceea, un SBC este un instrument complementar celui analitic, care poate reprezenta si rationa cu modele cauzele, baze de date relationale in timp si spatiu, structuri taxonometrice.
controlul cu supervizare printr-un SBC se refera la acordarea si adaptarea parametrilor instalatiei pentru obtinerea unei productivitati maxime. In aplicatiile numite sisteme expert pentru controlul prin supervizare (SECS), functiile de reglare primara sunt asigurate prin tehnici conventionale, iar SBC-ul inglobat este utilizat in mod supervizor pentru extinderea acestora. Daca un SBC inlocuieste complet elementul de reglare conventionala, se obtine un sistem expert de control direct (SECD). O clasa particulara de SECD este reprezentata de controlerul bazat pe cunostinte (CBC). In particular, daca tehnicile de reprezentare a cunostintelor si mecanismul de inferenta este bazat pe logica fuzzy, se obtine controlerul fuzzy bazat pe cunostinte (CFBC).
Un CFBC trebuie sa asigure indeplinirea urmatoarelor trei obiective:
sa elimine orice erori semnificative ale iesirii y(k), prin ajustari corespunzatoare ale marimii de comanda u(k);
sa previna ca iesirea procesului y(k) sa depaseasca o anumita valoare limita yc;
sa nu modifice u(k) la fluctuatiile minore ale valorii y(k) in jurul punctului de functionare.
Cu toate ca astfel de obiective sunt tipice pentru majoritatea aplicatiilor industriale si un opreator de proces le rezolva facil, un controler conventional PI(D) nu este capabil sa le asigure pe toate fara a fi extins cu o anumita logica euristica. Experienta operatorului poate fi utilizata in controlerul fuzzy sub forma unor reguli de productie de tipul IF (stare de proces) THEN (comanda). Partea (starea proces) este antecedentul regulii si contine o descriere a iesirii procesului la momentul de esantionare k, data de valori particulare ale erorii, modificarii erorii si restrictiilor. Partea (comanda) este consecinta regulii si contine o descriere a modificarii comenzii procesului, sub forma unei valori rezultata din antecedent.
Baza de reguli a unui CFBC este formata din doua grupuri:
primul, folosit in calculul comenzii incrementale curente, este numit grupul regulilor active. O astfel de regula are urmatoarea forma:
IF valoarea lui e(k) IS (variabila lingvistica) AND valoarea lui De(k) IS (variabila lingvistica)
THEN valoarea lui Du(k) IS (variabila lingvistica)
unde (variabila lingvistica) poate lua valorile cunoscute: NB, NS, ZE, PS, PB, etc
al doilea, numit grupul regulilor restrictii, este utilizat pentru a corecta eventual comanda elaborata cu reguli active, dupa verificarea restrictiilor impuse procesului. O regula restrictie are urmatoarea forma:
IF valoarea lui e(k) IS in regiunea cu restrictii THEN valoarea lui Du(k) IS dc (dc - drastic schimbata).
Structura de principiu a unui CFBC este prezentata in Figura III.29. Controlerul este alcatuit din urmatoarele componente:
Modulul de fuzificare (FM) contine doua componente:
v FMF1 asigura normalizarea intrarii, adica executa o transformare de scala constand in reprezentarea valorilor fizice ale variabilelor de stare ale procesului intr-un univers al discursului normalizat (un domeniu normalizat);
v FMF2 asigura fuzificarea propriu-zisa, adica conversia valorilor curente ale variabilelor de stare ale procesului intr-o multime fuzzy compatibila cu reprezentarea fuzzy a acestora in antecedentul regulilor de inferenta. Parametrul de proiectare al acestui modul este alegerea, in functie de tipurile mecanismului de inferenta si ale regulilor utilizate in aplicatie, a strategiei de fuzificare.
2. Baza de cunostinte este constituita dintr-o baza de date si o baza de reguli.
Functia principala a bazei de date este de a furniza informatia necesara pentru functionarea modulului de fuzificare, a bazei de reguli si a modulului pentru defuzificare. Aceste informatii includ functii de apartenenta (multimile fuzzy reprezentand valorile lingvistice ale variabilelor de stare ale procesului si ale comenzilor), domenii fizice si corespondentele lor normalizate, factorii de scalare pentru normalizare/denormalizare, tabela de esantionare pentru domeniile continue ale variabilelor sistemului. Parametrii de proiectare ai bazei de date includ alegerea functiilor de apartenenta si alegerea factorilor de scalare.
Functia esentiala a bazei de reguli este sa reprezinte intr-un mod structurat strategia de control a unui operator de proces experimentat si/sau a unui inginer, sub forma unui set de reguli de productie. Parametrii de proiectare necesari in constructia bazei de reguli includ alegerea variabilelor de stare si de comanda ale procesului, a continutului antecedentelor si consecintelor regulilor si a variabilelor lingvistice asociate marimilor din sistem.
3. Mecanismul de inferenta este bazat fie pe compozitie, fie pe reguli individuale, dar in ceea ce priveste valoarea comenzii pe care o furnizeaza cele doua metode sunt echivalente. Mai frecvent este utilizata a doua metoda, care functioneaza pe principiul ca fiecare regula da o valoare calculata a comenzii. Pe baza evaluarii unui criteriu, se obtine o multime fuzzy de valori adecvate ale comenzii, din care ulterior este aleasa una singura. Parametrii de proiectare includ alegerea formei de reprezentare a regulilor de productie, alegerea setului de reguli, alegerea mecanismului de inferenta si testarea consistentei si completitudinii setului de reguli. Se utilizeaza reprezentari ale regulilor de tip Mamdani sau Godel.
Modulul pentru defuzificare (DM) contine doua componente:
v DMF1 executa defuzificarea, adica converteste multimea valorilor fuzzy ale comenzii intr-o singura valoare crisp (continua);
v DMF2 executa o denormalizare a iesirii, care transfera valoarea comenzii intr-un domeniu fizic.
O mare importanta pentru performantele controlerelor fuzzy de tip P, PD, PI sau PID o are alegerea variabilelor si a continutului regulilor.
Variabilele de stare ale procesului, selectate pentru a reprezenta continutul antecedentului regulilor, sunt: eroarea e, variatia erorii De, suma erorilor de Variabilele de comanda, selectate pentru a reprezenta continutul consecintei regulilor, sunt: comanda procesului u si variatia comenzii Du. Relatiile intre aceste variabile sunt cele cunoscute:
 (4.1)
(4.1)
Continutul regulilor se stabileste pentru fiecare tip de controler fuzzy, pornind de la ecuatia controlerului conventional omonim (kp, kd, ki sunt respectiv coeficientii de amplificare proportional, diferential si integral):
Se obtin astfel reguli de forma:
pentru controler fuzzy P:
IF e IS (simbol) THEN u IS (simbol)
pentru control fuzzy PD:
IF e IS (simbol) AND De IS (simbol) THEN u IS (simbol) (4.4)
pentru controler
fuzzy PI, considerand ecuatia echivalenta ![]() :
:
IF e IS (simbol) AND De IS (simbol) THEN Du IS (simbol) (4.5)
pentru controler
fuzzy PID, introducand ca variabila de stare aditionala a
procesului suma erorilor ![]() , se obtine regula:
, se obtine regula:
IF e IS (simbol) AND De IS (simbol) AND de IS (simbol) THEN u IS (simbol)
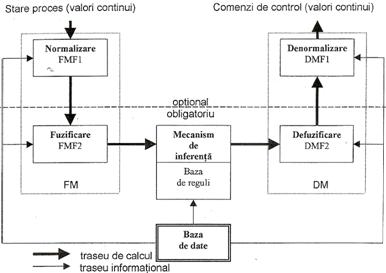
Figura III.29. Schema de principiu a unui controler fuzzy bazat pe cunostinte
Mai sus, prin (simbol) am desemnat numele simbolic al unei valori lingvistice fuzzy. Generalizand, forma tipica a unei reguli pentru un controler fuzzy bazat pe cunostinte (denumit si controler Sugeno) este:
IF x1 IS (simbol) AND ..AND xn IS (simbol) THEN u = f(x1,.,xn)
unde x1,,xn sunt variabilele de stare ale procesului iar f(x1,..,xn) o functie liniara. Problema proiectarii unui CFBC pentru un proces de tip MISO (intrari multiple, o singura iesire) poate fi generalizata astfel:
Fie x = (x1,., xn) vectorul variabilelor de stare ale procesului, y - iesirea procesului si u - marimea de comanda (intrarea procesului). Fie X = X1 x X2 x Xn , Y si U domeniile lui x, y, respectiv u. Modelul conventional in bucla inchisa, liniarizat in jurul unui punct de functionare este:
x(k+1) = A x(k) + bTu(k)
y(k) = cTx(k) (4.8)
u(k) = k y(k),
Ecuatiile de stare (4.2.8) pot fi rescrise astfel:
x(k+1) = A x(k) + bT u(k) (4.9)
u(k) = k cT x
Corespondentul fuzzy al unui
asemenea model se defineste considerand variabilele lingvistice xi, cu multimile de
termeni axi. Notam cu Lxi un element arbitrar
dintr-o astfel de multime. Atunci, vectorul de stare al procesului,
definit lingvistic, este ![]() . In maniera similara, y este dat de valorile lingvistice
. In maniera similara, y este dat de valorile lingvistice ![]() , care au functia de apartenenta corespunzatoare
, care au functia de apartenenta corespunzatoare
![]() , iar u este dat de
, iar u este dat de
![]() , cu functia
, cu functia ![]() . Ecuatiile care descriu modelul fuzzy pentru sistemul
in bucla inchisa sunt:
. Ecuatiile care descriu modelul fuzzy pentru sistemul
in bucla inchisa sunt:
 (4.10)
(4.10)
![]() este o relatie
fuzzy pe X x U x X, numita matricea fuzzy de tranzitie a
procesului. Multimea regulilor de productie contine
reprezentari simbolice de forma:
este o relatie
fuzzy pe X x U x X, numita matricea fuzzy de tranzitie a
procesului. Multimea regulilor de productie contine
reprezentari simbolice de forma:
if x1(k) is LX1 and.and xn(k) is LXk and u(k) is LU
then x1(k+1) is LX1 and.and xn(k+1) is LXk
![]() este o relatie
fuzzy pe X x Y reprezentand controlerul
prin domeniul unui multimi de reguli avand reprezentarea simbolica: (
este o relatie
fuzzy pe X x Y reprezentand controlerul
prin domeniul unui multimi de reguli avand reprezentarea simbolica: (
if x1(k) is LX1 and...and xn(k) is LXk then u(k) is LU
Inlocuind ![]() se obtine:
se obtine:
![]() (4.13)
(4.13)
Utilizand urmatoarea
lema: daca ![]() si
si ![]() sunt multimi
fuzzy cu domeniile A si B si
sunt multimi
fuzzy cu domeniile A si B si ![]() este o relatie
fuzzy pe A x B x A, atunci:
este o relatie
fuzzy pe A x B x A, atunci:
![]() (4.14)
(4.14)
atunci ecuatia (4.2.10) se poate rescrie astfel:
![]() (4.15)
(4.15)
unde ![]() este o functie de
apartenenta definita pe X,
este o functie de
apartenenta definita pe X,
![]() o functie de
apartenenta definita pe U
(pentru ca
o functie de
apartenenta definita pe U
(pentru ca ![]() este definita pe X, iar
este definita pe X, iar ![]() pe X x U), iar
pe X x U), iar ![]() este o relatie
fuzzy definita pe X x U x X.
Putem rescrie ecuatia (4.2.15) si altfel:
este o relatie
fuzzy definita pe X x U x X.
Putem rescrie ecuatia (4.2.15) si altfel:
![]() (4.16)
(4.16)
Acum problema proiectarii CFBC se formuleaza astfel:
Sa
se determine o relatie fuzzy ![]() pe X x U x X, astfel incat:
pe X x U x X, astfel incat:
![]() (4.17)
(4.17)
Cu alte cuvinte, pentru a-l
putea construi pe ![]() , trebuie cautat un
, trebuie cautat un ![]() , astfel incat
, astfel incat ![]() , unde
, unde ![]() este relatia
fuzzy necunoscuta reprezentand controlerul fuzzy.
este relatia
fuzzy necunoscuta reprezentand controlerul fuzzy.
Alegerea setului de termeni lingvistici ai controlerului este o alta etapa in proiectarea unui CFBC. Setul (multimea) de termeni aX ai variabilei lingvistice X consta in numarul finit de valori exprimate verbal (lingvistic) pe care le poate lua aceasta. Valorile sunt exprimate prin perechi de forma (semn valoare marime valoare), ca - de exemplu - (pozitiv mare), (negativ mic), etc.
Considerand cazul unui CFBC de tip PI pentru care multimile de termeni ai variabilelor e, De si Du au fost alese egale - aE = aDE = aDU = - atunci baza de reguli a controlerului poate fi reprezentata prin tabela din figura 4.2. Celula de la intersectia unei linii cu o coloana reprezinta o regula. Astfel, la intersectia primei linii cu prima coloana avem regula IF e(k) is NB and De(k) is NB THEN Du (k) is NB.
Marimea setului de termeni lingvistici determina finetea (granularitatea) actiunilor de control ale CFBC si determina numarul de reguli (daca fiecare set de termeni ai lui e si De are 10 elemente, rezulta o baza cu 100 de reguli).
Cel mai frecvent, deducerea regulilor unui CFBC se bazeaza pe experienta operatorului de proces, utilizand doua tehnici: verbalizarea introspectiva a cunostintelor sau interogarea printr-un chestionar. In ambele cazuri se obtine o versiune prototip a bazei de reguli, care ulterior va fi ajustata. Setul de reguli poate fi obtinut si dintr-o descriere lingvistica a modelului fuzzy a procesului condus sau utilizand o tehnica formala de conversie in varianta fuzzy a unui model conventional.
Constructia bazei
de date consta in alegerea adecvata a functiilor de apartenenta si a factorilor de scalare. Pentru calculul
marimii de comanda este nevoie de o interpretare cantitativa a
domeniului valorilor lingvistice. Domeniul de interpretare al unei valori
lingvistice particulare LX a
variabilei lingvistice x este dat de
multimea fuzzy ![]() .
.
Daca presupunem ca aE = aDE = aDU = vor trebui definite 21 de functii de apartenenta, cate una pentru fiecare variabila lingvistica din multimea de termeni in raport cu domeniile E, DE si DU. Pentru eficienta calculelor si economie de memoriei, se impune o reprezentare uniforma a functiilor de apartenenta. Pentru ca permit o descriere parametrica si functionala simpla, sunt recomandate functiile triunghiulare, trapezoidale sau clopot (Figura III.31). Dupa alegerea formei functiei de apartenenta, fiecare element al multimii termenilor unei variabile lingvistice se reprezinta grafic, de obicei pe domeniul normalizat (-6,6), ca in exemplul din Figura III.32. Pentru a vedea cum reprezentarea poate afecta performantele controlerului fuzzy, vom defini cativa parametri.
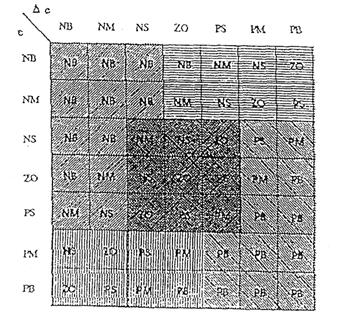
Figura III.30. Tabela de reprezentare a regulilor pentru un controler fuzzy PI
Valoarea
de varf a unei functii de
apartenenta  este acel xv pentru care
este acel xv pentru care ![]() . Largimea
stanga si dreapta
reprezinta marimea intervalului de la xv la valorile din stanga si dreapta lui xv pentru care gradul de
apartenenta este 0. Suma
largimilor celor doua intervale se numeste suportul lui mLX. Daca cele
doua largimi sunt egale, functia este simetrica. Punctele de
intersectie a doua functii mLX1 si mLX2 reprezentand domeniile a doua valori
lingvistice diferite ale lui X, sunt
acele valori xi din X pentru care
. Largimea
stanga si dreapta
reprezinta marimea intervalului de la xv la valorile din stanga si dreapta lui xv pentru care gradul de
apartenenta este 0. Suma
largimilor celor doua intervale se numeste suportul lui mLX. Daca cele
doua largimi sunt egale, functia este simetrica. Punctele de
intersectie a doua functii mLX1 si mLX2 reprezentand domeniile a doua valori
lingvistice diferite ale lui X, sunt
acele valori xi din X pentru care ![]() . Nivelul
punctului de intersectie xi
reprezinta gradul de apartenenta al functiilor in acel
punct.. Numarul punctelor de intersectie se numeste ratia de intersectie. Pentru
functii de apartenenta triunghiulare, parametrii definiti
mai sus sunt prezentati grafic in Figura III.32.
. Nivelul
punctului de intersectie xi
reprezinta gradul de apartenenta al functiilor in acel
punct.. Numarul punctelor de intersectie se numeste ratia de intersectie. Pentru
functii de apartenenta triunghiulare, parametrii definiti
mai sus sunt prezentati grafic in Figura III.32.
Functiile de apartenenta trebuie alese astfel incat nivelul punctelor de intersectie sa fie mai mare ca 0, astfel incat in faza de fuzificare fiecare valoare crisp a erorii sa poata fi reprezentata. In caz contrar, pot aparea situatii cand comanda are discontinuitati. Daca ratia de intersectie intre doua functii este 0, in procesul de inferenta este utilizata numai una din reguli. Pentru sisteme liniare de ordin mai mare ca trei si functii de apartenenta simetrice se recomanda alegerea ratiei 1 si nivelului de intersectie 0.5.
Valoarea
de varf a unei functii de
apartenenta este acel xv pentru care ![]() . Largimea
stanga si dreapta
reprezinta marimea intervalului de la xv la valorile din stanga si dreapta lui xv pentru care gradul de
apartenenta este 0. Suma
largimilor celor doua intervale se numeste suportul lui mLX. Daca cele
doua largimi sunt egale, functia este simetrica. Punctele de
intersectie a doua functii mLX1 si mLX2 reprezentand domeniile a doua valori
lingvistice diferite ale lui X, sunt
acele valori xi din X pentru care
. Largimea
stanga si dreapta
reprezinta marimea intervalului de la xv la valorile din stanga si dreapta lui xv pentru care gradul de
apartenenta este 0. Suma
largimilor celor doua intervale se numeste suportul lui mLX. Daca cele
doua largimi sunt egale, functia este simetrica. Punctele de
intersectie a doua functii mLX1 si mLX2 reprezentand domeniile a doua valori
lingvistice diferite ale lui X, sunt
acele valori xi din X pentru care ![]() .
.

Figura III.31. Forme de reprezentare ale functiilor de apartenenta utilizate in controlul fuzzy
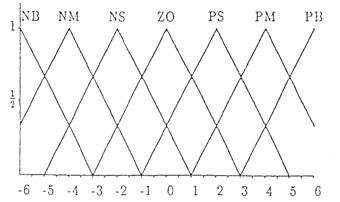
Figura III.32. Reprezentarea pe domeniul normalizat a multimii termenilor unei variabile lingvistice
Nivelul punctului de intersectie xi reprezinta gradul de apartenenta al functiilor in acel punct.. Numarul punctelor de intersectie se numeste ratia de intersectie. Pentru functii de apartenenta triunghiulare, parametrii definiti mai sus sunt prezentati grafic in Figura III.33.
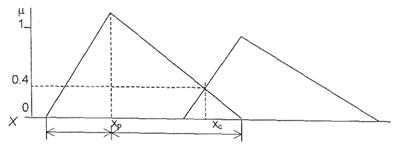
Figura III.33. Semnificatia unor parametri ai functiilor de apartenenta
Functiile de apartenenta trebuie alese astfel incat nivelul punctelor de intersectie sa fie mai mare ca 0, astfel incat in faza de fuzificare fiecare valoare crisp a erorii sa poata fi reprezentata. In caz contrar, pot aparea situatii cand comanda are discontinuitati. Daca ratia de intersectie intre doua functii este 0, in procesul de inferenta este utilizata numai una din reguli. Pentru sisteme liniare de ordin mai mare ca trei si functii de apartenenta simetrice se recomanda alegerea ratiei 1 si nivelului de intersectie 0.5.
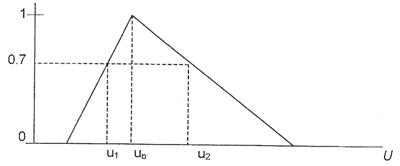
Figura III.34. Calculul consecintei unei reguli
Simetria si
latimea functiei de apartenenta influenteaza
procesul de inferenta. Considerand functia reprezentata in
exemplu, daca o regula a controlerului are consecinta u este NM si antecedentul ei are
valoarea 0.7, atunci se obtin in
domeniul lui u doua valori
consecinta corespunzatoare, u1
si u2. Cum comanda
este unica, ea trebuie calculata din cele doua valori.
Solutiile pot fi date de media ![]() sau de extensia
acesteia, numita metoda centrului
de gravitatie:
sau de extensia
acesteia, numita metoda centrului
de gravitatie: . Functia mCNM reprezinta
taietura lui mLU cu a. In cazul in care mCNM este de forma triunghiulara
si valoarea de adevar a antecedentului este 1 (Figura III.35), mCNM mLU dar uCG
este diferit de uV.
Problema poate fi evitata alegand functii de apartenenta
simetrice in raport cu valoarea de varf.
. Functia mCNM reprezinta
taietura lui mLU cu a. In cazul in care mCNM este de forma triunghiulara
si valoarea de adevar a antecedentului este 1 (Figura III.35), mCNM mLU dar uCG
este diferit de uV.
Problema poate fi evitata alegand functii de apartenenta
simetrice in raport cu valoarea de varf.
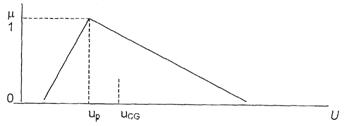
Figura III.35. Influenta asimetriei functiei de apartenenta asupra valorii consecintei unei reguli
Pentru a ilustra influenta latimii functiilor de apartenenta, sa consideram exemplul unui controler fuzzy P cu doua reguli ( IF e is PM THEN u is PB si IF e is PS THEN u is PB), unde PM si PS apartin setului de termeni aE al lui e iar PB si PM apartin setului de termeni aU al lui u. Functiile de apartenenta mPM si mPS reprezentand domeniile valorilor lingvistice PM si PS din antecedentele regulilor au in Figura III.36 doua reprezentari.
In prima dintre ele, latimea stanga a lui mPS este egala cu latimea dreapta a lui mPM si suma lor este egala cu marimea intervalului intre valorile de varf ale celor doua functii. In a doua reprezentare, aceasta conditie de latime nu mai este respectata. Influentele asupra consecintelor regulilor sunt prezentate in Figura III.37, care arata o comanda continua in primul caz si discontinua in al doilea. De aceea se impune ca totdeauna pentru functii de apartenenta adiacente sa fie respectata conditia de latimi egale.
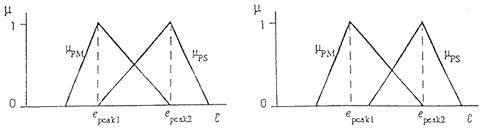
Figura III.36. Influenta simetriei functiei de apartenenta asupra consecintei regulii
Pentru implementarea algoritmilor de control fuzzy, domeniile continue trebuie discretizate. Acest proces se desfasoara in doua etape.
In prima din ele, domeniul continuu este cuantificat intr-un numar finit de segmente (nivele de cuantificare), numite elemente generice. Multimea tuturor elementelor generice formeaza universul discret al discursului.
In etapa a doua, se construieste multimea fuzzy ce defineste domeniul valorii lingvistice prin asignarea unui grad de apartenenta fiecarui element generic.
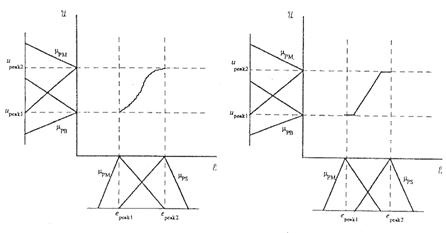
Figura III.37. Influenta latimii functiei de apartenenta asupra consecintei regulii
In tabela din Figura III.38 este prezentata o tabela de discretizare a domeniului continuu [-3.2, +3.2] in 30 de segmente, avand asignate valori din setul de termeni Numarul elementelor generice influenteaza semnificativ raspunsul controlerului si - cu toate nu exista inca instrumente formale de analiza - experimentele arata ca o alegere gresita poate duce la instabilitate sau la oscilatii in sistem. Oricum, pentru minimizarea erorilor cuantificarea trebuie sa fie fina.
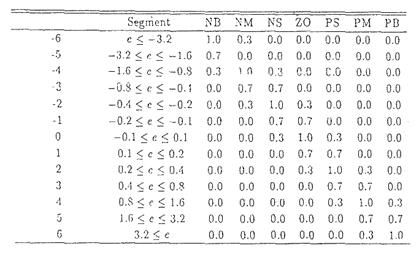
Figura III.38. Exemplu de tabela de discretizare a unui domeniu continuu
Operatiile de normalizare la intrare sau la iesire necesita alegerea factorilor de scala, care joaca un rol similar cu cel al coeficientilor de amplificare ai unui controler conventional, putand duce la deteriorarea performantelor tranzitorii, la oscilatii sau chiar la instabilitate. De exemplu, un CFBC tip PI poate fi reprezentat si prin relatia:
Nu.Du(k) = F(Ne.e(k), NDe De(k)) (4.18)
unde Ne, NDe si Nu sunt factorii de scalare pentru e, De si Du, iar F o functie neliniara reprezentand controlerul. Relatia (4.2.18) permite analogia cu relatia clasica pentru controlerului conventional si coeficientii kp si ki ai acestuia.
Determinarea factorilor de scalare se face euristic sau analitic. In prima abordare, considerand un CFBC tip PI, se stabilesc valorile dorite ale timpului tranzitoriu (ttd), timpului de crestere (tcd)si oscilatiile (od) si se definesc masuri ale performantei: Dtt = tt - ttd,, Dtc = tc - ttd, Do = o - od. Regulile de productie utilizate pentru ajustarea factorilor de scala au forma:
IF (valoare variabila de performanta) = (valoare) THEN DNe = (valoare)
IF (valoare variabila de performanta) = (valoare) THEN DNDe = (valoare)
Conform celor discutate in paragraful anterior, mecanismul de inferenta poate fi bazat pe compozitie sau pe reguli individuale. Uzual, se prefera inferenta individuala, care are viteza de calcul mai mare si consuma mai putina memorie. Pentru fiecare regula se calculeaza gradul de apartenenta a intrarii crisp la multimea fuzzy ce descrie antecedentul regulii si se efectueaza taietura multimii fuzzy ce descrie consecinta regulii in concordata cu valoarea de apartenenta din antecedent. In final sunt agregate toate valorile taieturilor pentru a obtine valoarea finala a comenzii.
Pentru exemplificare, sa consideram cazul particular al unui CFBC tip PD, bazat pe implicatii Mamdani. Expresia simbolica a unei reguli oarecare k este:
IF e is LE(k) AND De is LDE(k) THEN u is LU(k (4.19)
unde LE(k), LDE(k) si LU(k) sunt valori lingvistice din multimile de termeni ae, aDe si au, a caror semnificatie este reprezentata prin functiile de apartenenta mLE(k) mL DE(k) mLU(k) definite pe domeniile E, DE si U. In termenii implicatiei de tip Mamdani, semnificatia reguli (4.2.19) este data de o relatie fuzzy R(k) definita pe E x DE x U:
![]() (4.20)
(4.20)
Atunci, semnificatia intregului set de reguli este pur si simplu reuniunea semnificatiilor regulilor individuale mR(k), k = 1,..,n
![]() (4.21)
(4.21)
Presupunand ca e si De sunt valorile crisp actuale ale lui e si De, modulul de fuzificare produce urmatoarele doua functii de apartenenta:
 (4.22) care pot fi combinate intr-una
singura, reprezentand semnificatia antecedentului regulii:
(4.22) care pot fi combinate intr-una
singura, reprezentand semnificatia antecedentului regulii:
![]() (4.23)
(4.23)
Valoarea variabilei de comanda se obtine din compunerea lui mout si mR
![]() (4.24)
(4.24)
Pentru obtinerea valorii crisp a comenzii, cele mai utilizate metode pentru defuzificare sunt: centrul de greutate, centrul sumelor, centrul celei mai mari arii, primul maxim, media maximului, metoda inaltimii. Aceste denumiri nu sunt definitiv consacrate in literatura, insa metodele pot fi recunoscute prin definitia lor formala.
Reamintim ca o variabila lingvistica este definita prin setul (x, aX, X, MX). Fie acum acum o multime de m reguli:
IF x1 is LX1(k) AND.AND xn is LXn(k) THEN u is LU(k), k=1,.,m
Rezultatul evaluarii
regulilor (4.25) cu valorile crisp ale intrarii x*1,.,
x*m consta in m
multimi fuzzy "taiate": ![]() , din care se obtin m
multimi fuzzy scalate:
, din care se obtin m
multimi fuzzy scalate: ![]() . In Figura III.39 sunt prezentate cele doua tipuri de
multimi. Pentru defuzificare, nu se face nici o diferenta intre
multimile fuzzy "taiate" sau scalate. Daca vom nota cu CLU(k) valoarea marimii
de comanda rezultata dupa evaluarea unei reguli, cu
inaltimea egala cu fk si valoarea de varf egala cu valoare de varf a
versiunii "netaiate" a lui Lu(k),
atunci comanda finala
. In Figura III.39 sunt prezentate cele doua tipuri de
multimi. Pentru defuzificare, nu se face nici o diferenta intre
multimile fuzzy "taiate" sau scalate. Daca vom nota cu CLU(k) valoarea marimii
de comanda rezultata dupa evaluarea unei reguli, cu
inaltimea egala cu fk si valoarea de varf egala cu valoare de varf a
versiunii "netaiate" a lui Lu(k),
atunci comanda finala ![]() (sau mU) se obtine prin reuniune:
(sau mU) se obtine prin reuniune:  .
. ![]() este o multime fuzzy convexa sau contine
submultimi convexe, avand aria
este o multime fuzzy convexa sau contine
submultimi convexe, avand aria ![]() . Valoarea crisp a comenzii, rezulta din procesul de
defuzificare, o notam cu u
. Valoarea crisp a comenzii, rezulta din procesul de
defuzificare, o notam cu u
Cea mai cunoscuta metoda pentru defuzificare este cea a centrului de greutate. Pentru cazul continuu, respectiv cel discret, comanda crisp este data de relatiile urmatoare:
 (4.26)
(4.26)
 (4.27)
(4.27)
Comanda u reprezinta centrul ariei determinata de combinatia tuturor functiilor de apartenenta (Figura III.40), ariile suprapuse fiind luate in calcul o singura data.
Metoda centrului sumelor este aproape
similara cu cea de mai sus, dar evita calcularea lui ![]() prin reuniunea tuturor CLU(k). Aria integrala
se obtine prin insumarea tuturor CLU(k),
luand in calcul si ariile suprapuse, daca ele exista. Algoritmul
este simplu si frecvent utilizat, de multe ori fiind chiar confundat cu
metoda centrului de gravitatie.
prin reuniunea tuturor CLU(k). Aria integrala
se obtine prin insumarea tuturor CLU(k),
luand in calcul si ariile suprapuse, daca ele exista. Algoritmul
este simplu si frecvent utilizat, de multe ori fiind chiar confundat cu
metoda centrului de gravitatie.
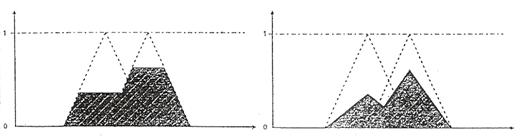
Figura III.39 . Multimi fuzzy taiate si scalate
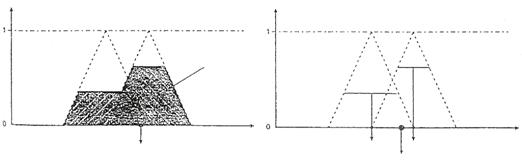
Figura III.40 . Metoda centrului de greutate, Figura III.41. Metoda inaltimilor
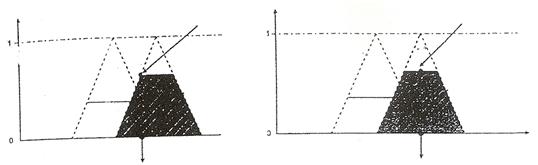
Figura III.42. Metoda primului maxim Figura III.43. Metoda mijlocului maximulu
Valorile comenzii pentru cazul discret, respectiv continuu sunt:
 (4.28)
(4.28)
 (4.29)
(4.29)
Metoda inaltimilor construieste suma ponderata a valorilor de varf C(k) ale fiecarei CLU(k) in raport cu inaltimile fk. (Figura III.41) :
 (4.30)
(4.30)
Metoda
centrului celei mai mari arii se aplica atunci cand ![]() este non-convexa, adica este alcatuita
din cel putin doua submultimi fuzzy convexe. Valoarea crisp a
comenzii va fi centrul ariei submultimii care are cea mai mare arie.
este non-convexa, adica este alcatuita
din cel putin doua submultimi fuzzy convexe. Valoarea crisp a
comenzii va fi centrul ariei submultimii care are cea mai mare arie.
Metoda
primului maxim ia in considerare cea mai
mica valoare a domeniului U cu
grad maxim de apartenenta la ![]() (Figura III.42). Daca cel mai mare grad de
apartenenta este
(Figura III.42). Daca cel mai mare grad de
apartenenta este ![]() si domeniul
elementelor cu grad de apartenenta egal cu hgt(U) este
si domeniul
elementelor cu grad de apartenenta egal cu hgt(U) este ![]() , atunci:
, atunci:
![]() (4.31)
(4.31)
O versiune alternativa, numita metoda ultimului maxim, alege comanda:
![]() (4.32)
(4.32)
Metoda mijlocului maximului calculeaza u* ca medie intre prima si ultima valoare din U care dau grad maxim de apartenenta (Figura III.43):
 (4.33)
(4.33)
Nu exista o metoda ideala pentru defuzificare, dar alegerea ei se poate baza pe criteriile prezentate in Figura III.44. Aceste criterii sunt: continuitatea, neambiguitatea, pluzibilitatea, complexitatea calculelor si utilizarea ponderilor.
Continuitatea asigura
respectarea enuntului: ![]() (4.34) adica
o mica schimbare a intrarii controlerului nu trebuie sa
duca la o modificare de amploare a iesirii acestuia.
(4.34) adica
o mica schimbare a intrarii controlerului nu trebuie sa
duca la o modificare de amploare a iesirii acestuia.
|
Proprietatea |
CA |
CS |
MM |
PM |
MI |
CM |
|
Continuitate |
da |
da |
nu |
nu |
da |
nu |
|
Neambiguitate |
da |
da |
da |
da |
da |
nu |
|
Plauzibilitate |
da |
da |
nu |
nu |
da |
da |
|
Complexitatea calculelor |
slaba |
buna |
buna |
buna |
buna |
slaba |
|
Utilizarea ponderilor |
nu |
da |
nu |
nu |
da |
nu |
Figura III.44. Tabel comparativ al caracteristicilor metodelor pentru defuzificarea comenzii (CA -centrul ariilor; CS - centrul sumelor; MM - mijlocul maximului; PM - primul maxim; MI - metoda inaltimii; CM - centrul celei mai mari arii)
Neambiguitatea asigura evitarea situatiilor de tipul: aplicand metoda centrului celei mai mari arii se detecteaza doua submultimi fuzzy convexe de aceeasi arie si rezultatul defuzificarii va fi, evident , ambiguu.
Fiecare comanda
defuzificata are o componenta orizontala u*IU si una
verticala mu(u*)I . Comanda este
plauzibila daca ea se mentine aproximativ la mijlocul suportului
![]() si are un inalt grad de apartenenta la U.
si are un inalt grad de apartenenta la U.
In aplicatiile practice ale CFBC complexitatea calculelor este importanta. Metodele inaltimii, ale primului si ultimului maxim sunt rapide, pe cand metoda centrului ariei este lenta. Complexitatea calculului centrului sumelor depinde de forma functiilor de apartenenta.
Metodele centrului sumei si a inaltimii utilizeaza ponderi in calcule, ceea ce duce la o crestere a acuratetii comenzii crisp obtinute.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |