
Sistemele moderene de conducere a proceselor presupun implementarea strategiilor (algoritmilor) de conducere pe cale numerica.
In acest capitol sunt prezentate particularitatile algoritmilor de reglare implementati pe cale numerica in acest proiect si de asemenea se prezinta clasa algoritmilor conventionali de reglare de tip PID, precum si problemele discretizarii si implementarii acestora pe cale numerica.
Conducerea numerica a unui proces continuu presupune prezenta elementelor de interfata, care asigura conversia semnalelor continue in semnale numerice (CAN) si, in mod corespunzator, conversia comenzii numerice in comanda continua (CAN), dupa cum se arata in figura 3.1.
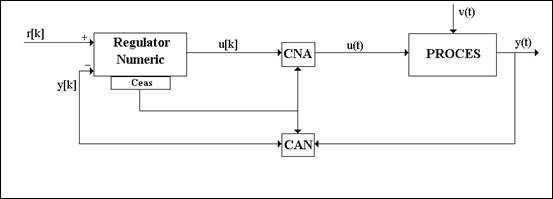
Figura 3.1
Operatia de conversia a marimii continue y(t) intr-o marime numerica yk presupune esantionarea marimii y(t) cu o perioada de esantionare T si atasarea la fiecare valoare y*(t) a unui numar intreg de cuante. Astfel, fiecarei aplitudini y*(t), esantionata cu perioada T din funcatia continua y(t), i se asociaza o marime numerica yk = y(kT).
Variabila yk este denumita variabila discreta, iar precizia de cunatizare (conversie) este data de lungimea cuvantului cu care opereaza convertorul analog - numeric. Un convertor cu 10 biti lungimea cuvantului are o rezolutie de 0.1%.
Comanda numerica elaborata de regulatorul numeric este transmisa la momente discrete de timp spre proces prin intermediul convertorului numeric - analogic. Convertorul CNA are rolul de a transforma marimile numerice in marimi analogice compatibile cu intrarea elementelor de executie. Conversia se poate realiza folosind diferite metode de aproximare (extrapolare) a comenzii intre momentele discrete de timp. Cea mai utilizata metoda de aproximare este metoda cu extrapolator de ordin zero - comanda se mentine constanta intre doua momente discrete de timp. De asemenea mai exista si metoda de aproximare cu extrapolator de ordinul intai, unde comanda variaza liniar intre doua momente discrete de timp.
In practica, cea mai utilizata metoda de aproximare a comenzii intre doua momente discrete de timp este mentinerea constanta a acesteia pe parcursul unei perioade de discretizare:
![]()
Comanda uk este calculata pe baza referintei in forma discreta rk si a iesirii in forma discreta (numerica) yk. Este usor de remarcat faptul ca iesirea convertorului numeric - analogic este cvasicontinua.
Pentru obtinerea ecuatiilor cu diferente pentru diversi algoritmi continui de reglare descrisi prin ecuatii diferentiale sau functii de transfer, pot fi folosite mai multe metode de discretizare.
Cele mai utilizate metode de discretizare a algoritmilor continui sunt: metoda dreptunghiurilor si metoda trapezelor. Pentru a ilustra cele doua metode, consideram integrala:

a carei aproximare numerica poate fi obtinuta sub forma:
![]()
in cazul aproximarii prin metoda dreptunghiurilor si sub forma:
![]()
in cazul utilizarii metodei trapezelor.
Daca aplicam transformata Z ecuatiilor de mai sus, obtinem cu usurinta functia de transafer a unui integrator numeric sub forma:
![]()
respectiv:
![]()
Acelas rezultat se obtine daca aproximam ![]() folosind diferite metode:
folosind diferite metode:
![]()
sau:
![]()
sau:
Ecuatiile cu diferente pentru algoritmii PID de reglare se pot obtine, fie direct din ecuatiile diferentiale, fie din functiile de transfer HR(s) , unde variabila s se inlocuieste cu aproximarea in Z a acesteia.
La alegerea metodei de discretizare a algoritmilor PID, se iau in consideratie precizia de aproximare a algoritmului continuu, complexitatea relatiilor de calcul ale parametrilor algoritmului si capacitatea de structurare a algoritmului in vederea implementarii cu o felxibilitate ridicata.
Este usor de observat ca metoda trapezelor aproximeaza mai precis integrala si are avantajul ca semiplanul stang al planului s este transformat in interiorul cercului unitar. Utilizarea metodei Euler de aproximare poate conduce la instabilitate: un sistem continuu stabil poate fi transformat intr-un sistem discret instabil. Aproximarea pe baza diferentei inapoi asigura totdeauna conservarea stabilitatii sistemului dupa transformare.
Algoritmul PID ideal este descris de ecuatia:
![]()

Folosind metoda dreptunghiurilor pentru aporximarea integralei in relatia (3.1) obtinem:

sau:

De remarcat este faptul ca, in ambele cazuri, pentru a obtine comanda la pasul curent, este necesara cunoasterea componentei Ik-1 , deci algoritmul trebuie initializat. Astfel cele doua relatii (3.2a) si (3.2b) pot fi puse si sub forma:

respectiv

Algoritmul in forma (3.3) sau (3.2) este cunoscut sub denumirea de algoritm PID de pozitie. Pentru a elimina neajunsul algoritmului de pozitie, care trebuie initializat, vom obtine comanda sub forma incrementala, pornind de la relatia:

Daca din relatia (3.3a) scadem relatia (3.4), se obtine:

De remarcat este faptul ca, in acest caz, algoritmul nu mai trebuie initializat, comanda se genereaza sub forma unui increment:

iar amplitudinea incrementului poate fi controlata prin valorile parametrilor KR , Ti, Td si T (perioada de esantionare). Algoritmul descris prin (3.6) este cunoscut sub denumirea de algoritm PID incremental.
Daca facem urmatoarele notatii:
algoritmul PID incremental se mai poate scrie sub forma:
![]()
Algoritmul PID incremental poate fi descris si prin functia de transfer:
![]()
unde z-1 = e-sT. Modelul (3.8) se obtine imediat daca se aplica transformata Z ecuatiei cu diferente (3.7), care poate fi pusa si sub forma:
![]()
![]()
unde q-1 este operatorul de intarziere (q-1εk εk-1
Acelas rezultat se obtine si daca in functia de transfer :
![]()
se introduce
susbstitutia: ![]()
Am ales sa prezint in aceasta lucrare algoritmul de reglare PID numeric de tip incremental impreuna cu toate avantajele sale doarece un astfel de regulator numeric este implementat si in proiectul meu cu ajutorul programului RSLogix.
Insa pe langa cele doua forme mai exista si alte tipuri de forme de regulatoare numerice de tip PID cum ar fi algoritm PID modificat sau cu filtrare.
Intr-o configuratie clasica de reglare, regulatorul PID continuu cu filtraj pe actiunea derivativa, este definit prin functia de transfer traditionala:
 (3.9)
(3.9)
Notam prin: K![]() IR - castigul
sau amplificarea regulatorului, Ti Td
IR - castigul
sau amplificarea regulatorului, Ti Td
![]() IR* -
constante pentru actiunea integrala, respectiv derivativa, N
IR* -
constante pentru actiunea integrala, respectiv derivativa, N![]() IN* - constanta
de filtraj. Intrarea in algoritmul de
comanda este eroarea de reglare, adica diferenta dintre marimea de
referinta si marimea de iesire reglata, iar marimea de la iesirea din regulator
este comanda numerica u(k).
IN* - constanta
de filtraj. Intrarea in algoritmul de
comanda este eroarea de reglare, adica diferenta dintre marimea de
referinta si marimea de iesire reglata, iar marimea de la iesirea din regulator
este comanda numerica u(k).
Sa notam ca algoritmul PID descris prin relatia (3.9) se aplica cu cele mai bune rezultate pentru procese reprezentate prin modele de ordinul unu si doi fara, si cu timp mort avand limitare la timpul mort (inferior unei perioade de esantionare).
Regulatorul PID numeric este obtinut prin discretizarea algoritmului PID continuu, folosind spre exemplu urmatoarea relatie aproximativa:
![]()
unde h este perioda de esantionare.
Obtinem atunci functia de transfer discreta :
 (3.10)
(3.10)
Din relatia (3.10), se obtine imediat expresia functiei de transfer in operatorul de intarziere q-1:
 (3.11)
(3.11)
unde:
 3.12
3.12
Este posibila exprimarea algoritmului PID sub forma canonica RST prin polinoame de ordinul doi cu restrictia T=R, dupa cum urmeaza
 (3.13)
(3.13)
Remarcam faptul ca regulatorul numeric este caracterizat prin 4 parametri: r0, r1, r2 si s1, ce urmeaza sa fie evaluati in faza de proiectare. Schema sistemului in bucla inchisa este reprezentata in Figura 3.2, iar functia de transfer in acest caz se scrie ca mai jos:
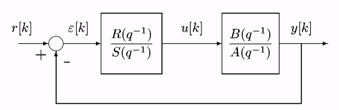
Figura 3.2: Sistem de reglare cu comanda PID exprimata in forma canonica RST.
Sa notam ca factorul (1-q-1) exprima efectul de integrare (numerica), iar factorul (1 + s1q-1) exprima efectul de filtrare (numerica).
Performantele sistemului pot fi specificate, in conformitate cu metoda alocarii polilor pentru sistemul in bucla inchisa, printr-o distributie de poli dorita, introdusa prin polinomul caracteristic al sistemului P(q-1), cu exprimarea urmatoare:
![]() (3.14)
(3.14)
In practica, se alege P(q-1) un polinom de ordinul doi (cu coeficienti cunoscuti, respectiv radacini impuse) sugerat de existenta unei solutii pentru ecuatia polinomiala din (3.14), deci avem:
![]()
Acesta reprezinta, echivalentul discretizat al unui model continuu de ordinul doi, in reprezentare standard
Rezulta ca, pentru calculul parametrilor regulatorului PID trebuie rezolvata urmatoarea ecuatie polinomiala
![]()
Se pot face urmatoarele comentarii :
Produsul B(q-1)R(q-1) defineste zerourile sistemului in bucla inchisa. Regulatorul PID nu simplifica deci zerourile procesului si atunci algoritmul PID poate fi folosit si pentru reglarea proceselor avind un model cu zerouri instabile;
Regulatorul PID introduce zerouri suplementare prin factorul R(q-1), care depinde de A(q-1), B(q-1) si P(q-1) si care pot afecta performantele tranzitorii ale sistemului.
Regulatorul PID in versiune ameliorata este un PID numeric care nu introduce zerouri suplimentare, contrar cu cazul precedent.
Pentru a obtine efectul scontat, functia de transfer dorita in bucla inchisa se impune de la inceput, sub forma:
![]() (3.15)
(3.15)
unde B(q-1) reprezinta zerourile procesului care raman neafectate, P(q-1) defineste polii alocati pentru sistemul in bucla inchisa si factorul P(1)/B(1) este introdus pentru a asigura un cistig static unitar de la marimea de intrare (referinta) la iesirea sistemului. Polinomul P(q-1) verifica de asemenea identitatea (3.14).
Pentru a putea ajunge la structura numerica ilustrata de Figura 3.2, impunem conditia naturala ca perechea S(q-1) si R(q-1) sa fie obtinuta din ecuatia (3.13).
Functia de transfer a sistemului in bucla inchisa se identifica cu cea impusa prin relatia (3.15).
![]() 3.16
3.16
Rezulta imediat, exprimarea polinomului T(q-1):
![]() (3.17)
(3.17)
deoarece S(1) = 0 si atunci, P(l) = B(1)R(1).
Regulatorul PID versiunea ameliorata, contine polinoamele S(q-1) si R(q-1) identice cu cele ale algoritmului PID precedent, singura diferenta este ca T(q-1) =R(l) (o constanta), in loc de T(q-1) = R(q-1) (un polinom de gradul doi).
In acest caz, se pastreaza castigul static unitar al sistemului in bucla inchisa fara sa introducem efectul zerourilor prin R(q-1).
Algoritmii de reglare obtinuti prin discretizarea algoritmilor continui au, in general, performante inferioare ca urmare a aproximarii componentelor integrala si derivativa si, evident, ca urmare a pierderii de informatie in procesul de esantionare si cuantizare. Pentru alegerea perioadei de discretizare, sunt recomandate, cel mai adesea pe baza experientei, relatii ce definesc raportul intre T (perioada de esantionare) si Ti, respectiv T si Td. Regulatoarele numerice industriale destinate reglarii unui numar redus de marimi din proces folosesc o perioada de discretizare fixata de oridnul a 100 ms. O alegere a perioadei T in jur de (75 - 150) ms determina o comportare cvasicontinua a algoritmului de reglare. In acest caz, pot fi extinse metodele de acordare cunoscute din domeniul sistemelor de reglare continue.
Este de remarcat faptul ca valori foarte mici ale perioadei T (frecvente mari de esantioanare) asigura o buna aproximare a algoritmului de reglare, insa costurile interfetei de proces sunt ridicate, numarul buclelor de reglare realizate cu un singur regulator este redus, iar complexitatea algoritmilor implementati este limitata.
In cazul in care T este prea mare, pierderea de informatie in procesul de esantionare determina o precizie redusa in comportarea sistemului de reglare, perturbatiile putand determina aparitia oscilatiilor intre momentele de esantionare.
Principalii factori ce trebuie luati in consideratie la alegerea perioadei de discretizare sunt:
Performantele dorite pentru sistemul de reglare;
Dinamica procesului si spectrul de frecventa al perturbatiilor;
Particularitatiile elementului de executie si ale traductoarelor;
Complexitatea algoritmilor si costul pentru fiecare bucla de reglare.
Este usor de observat ca alegerea perioadei de esantionare T presupune o analiza atenta a mai multor factori, al caror efect este cel mai adesea contradictoriu. In cazul sistemelor de reglare cu regulatoare numerice, sunt prezentate in literatura de specialitate recomandari privind alegerea perioadei T pentru diferite tipuri de procese si diferite spectre de frecventa ce caracterizeaza pertubatiile.
Dintre aceste recomandari amintim si noi cateva dintre ele:
T ≈ (0.1 . 0.3) Ti pentru regulatoarele PI;
T ≈ (0.3 . 1) τ sau T ≈ (0.1 . 0.3) To pentru regulatoarele PI acordate pe baza metodei Ziegler - Nicholas si procese cu timp mort;
T ≈ (1/6 . 1/15) tt , unde tt reprezinta durata regimului tranzitoriu.
Cerintele de performanta impuse la urmarirea referintei si rejectia perturbatiilor sunt factori determinanti la alegerea perioadei T. Cunoasterea a priori a performantelor elementelor de executie si ale traductoarelor, precum si cunoasterea calsei de perturbatii ce actioneaza asupra procesului reprezinta cerinte primare pentru o alegere corespunzatoare a perioadei T.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |