
|
|
Facultatea de Electrotehnica
Sectia Automatica si Informatica Industriala
Tema proiectului:
Sa se proiecteze schema de comanda pentru automatizarea alimentarii cu piese a unei benzi transportatoare.
Descrierea instalatiei si modul de functionare
Un cilindru hidraulic(H) cu simpla actiune distribuie pe o banda rulanta B,la intervale regulate,realizand un ciclu continuu,in lant.Schema de principiu a instalatiei este prezentata in figura de mai jos:
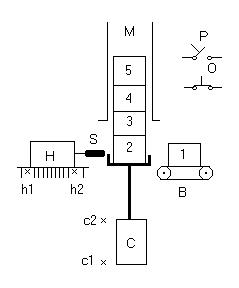
Un al doilea cilindru(C), tot cu simpla actiune (revenire prin resort), asigura mentinerea pieselor in magazia M, cand H este la cap de cursa, printr-un platan mai larg decat robotul impingator, S.
Pozitia celor doi cilindri este controlata de limitatoarele: h1, c1-cap de cursa in stare neactionata(dupa revenire prin resort h1,c1=1) si h2,c2-cap de cursa in stare actionata.Intrarea in ciclu automat se face la apasarea unui impuls,pe butonul "p",iar oprirea la apasare pe butonul "o".
In stare initiala h1=1,c1=1,p=0.Apasand un impuls pe p, H se deplaseaza spre dreapta; la atingerea contactului h2 incepe urcarea cilindrului C, pana la atingerea contactului c2. Se comanda a deplasarea inapoi cilindrului H (spre stanga), iar la inchiderea lui h1, se command coborarea lui C.Dupa inchiderea contactului c1, ciclul se reia.
Cilindrii fiind cu simpla actiune, se comanda doar deplasarea H-dreapta,C-sus;deplasarea H-stanga,C-jos se face prin resort.In aceste conditii deplasarea lui H este conditionata de p,c1,c2,iar deplasarea lui C- de h1 si h2.
In proiect se vor trata separat (pentru simplificare) comanda cilindrului H, respectiv comanda cilindrului C.
comanda cilindrului H
Variabile primare:p, c1,c2;functia de iesire(actionarea cilindrului H):H.
Variabile primare:h1,h2;functia de iesire(actionarea cilindrului C):C.
Proiectul va cuprinde urmatoarele puncte:
a) Diagrama de semnale "intrari-iesiri" pentru automatul secvential proiectat;
b) Determinarea matricei(tabelei)primare a starilor;
c) Reducerea numarului de stari ale matricei primitive(construirea matricei reduse a starilor);
d) Codificarea starilor matricei reduse;
e) Determinarea matricei tranzitiilor starilor si obtinerea functiilor de excitatie a automatului;
f) Functionarea matricelor iesirilor si a functiilor de iesire ale schemei
g) Implementarea functiilor logice obtinute
h) Analiza schemei logice obtinute.
Generalitati
Problemele de sinteza a circuitelor logice secventiale se definesc astfel:
-cunoscandu-se corespondenta dintre secventa de intrare si secventa de iesire,prin sinteza se determina circuitul care sa realizeze functionarea impusa.
In functionarea circuitelor logice secventiale asincrone trebuie avuta in vedere urmatoarea ipoteza simplificatoare:
-la un moment dat in regim stationar nun se modifica decat o singura variabila de stare (tranzitia unui circuit din starea curenta in starea urmatoare este determinata de modificarea la un moment dat de o singura variabila de intrare).
Pentru sinteza acestui circuit s-a ales metoda de sinteza matriceala (Huffman) caracteristica pentru circuitele cu un numar mic de intrari si de iesiri.
1.Diagrama de "intrari-iesiri" a automatului
Aceasta diagrama reprezinta o descriere care trebuie sa reflecte corespondenta completa intre intrarile si iesirile circuitului pentru un "ciclu de functionare complet"(CFC).
Prin CFC se intelege o evolutie a unui circuit logic care plecand dintr-o stare initiala comuta succesiv intr-un numar de stari stabile , fiecare stare corespunzand unei situatii reale din functionarea circuitului, pana se ajunge intr-o stare finala care este identica cu cea initiala.In sitatiile cele mai des intalnite,in practica, descrierea functionarii schemei se face fie prin text,
fie prin diagrame de semnal intrare-iesire.In acest ultim caz diagrama trebuie sa contina toate secventele posibile ale corespondentei intrare-iesire, in caz contrar intrarile acestei prime informatii ar conduce la structuri fizice incomplete sau avand functionarea modificata fata de cea impusa.
Diagrama de semnal pentru comanda cilindrului H:
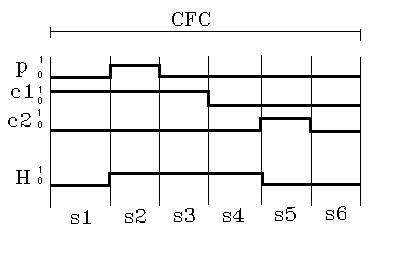
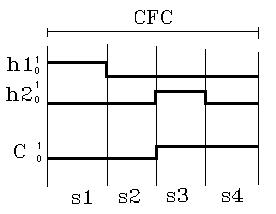
Diagrama de semnal pentru comanda cilindrului C:
2.Determinarea matricei primitive a starilor
Din conditiile impuse si din starile stabilite anterior se intocmeste tabela sau matricea primitiva a starilor (primitiva pentru ca nu este redusa) .Dupa intocmirea matricei primitive a starilor se pun in evidenta in aceasta starile stabile respectiv starile instabile ale automatului.De obicei, alaturi de matricea primitiva a starilor se intocmeste o matrice identica la dimensiuni cu aceasta in care se vor trece numai iesirile automatului, numindu-se matricea completa a iesirilor.
Determinarea maticei primitive a starilor pentru functia H:
f(s1,000) f(s1,001) f(s1,011) f(s1,010) s1
f(s2,000) f(s2,001) f(s2,011) f(s2,010) s3
f(s3,000) s4 f(s3,001) f(s3,011) f(s3,010) s3
f(s4,000) s4 f(s4,001) s5 f(s4,011) f(s4,010)
f(s5,000) s6 f(s5,001) s5 f(s5,011) f(s5,010)
f(s6,000) s6 f(s6,001) f(s6,011) f(s6,010) s3
f(s1,110) s2 f(s1,111) f(s1,101) f(s1,100)
f(s2,110) s2 f(s2,111) f(s2,101) f(s2,100)
f(s3,110) s2 f(s3,111) f(s3,101) f(s3,100)
f(s4,110) f(s4,111) f(s4,101) f(s4,100)
f(s5,110) f(s5,111) f(s5,101) f(s5,100)
f(s6,110) f(s6,111) f(s6,101) f(s6,100)
|
stari |
H |
||||||||
|
|
- |
- |
- |
2 |
- |
- |
- |
0 |
|
|
|
- |
- |
- |
3 |
- |
- |
- |
1 |
|
|
|
4 |
- |
- |
2 |
- |
- |
- |
1 |
|
|
|
5 |
- |
- |
- |
- |
- |
- |
1 |
|
|
|
6 |
- |
- |
- |
- |
- |
- |
0 |
|
|
|
- |
- |
3 |
- |
- |
- |
- |
0 |
Determinarea matricei primitive a starilor pentru functia C:
f(s1,00) s2 f(s1,01) f(s1,11) f(s1,10) s1
f(s2,00) s2 f(s2,01) s3 f(s2,11) f(s2,10)
f(s3,00) s4 f(s3,01) s3 f(s3,11) f(s3,10)
f(s4,00) s4 f(s4,01) f(s4,11) f(s4,10) s1
|
stari |
C |
||||
|
|
2 |
- |
- |
0 |
|
|
|
3 |
- |
- |
0 |
|
|
|
4 |
- |
- |
1 |
|
|
|
- |
- |
1 |
1 |
Conform matricelor de mai sus putem sa determinam matricea primitiva a iesirilor pentru H, respectiv pentru C:
|
stari | ||||||||
|
s1 |
0 |
|||||||
|
s2 |
1 |
|||||||
|
s3 |
1 |
|||||||
|
s4 |
- |
|||||||
|
s5 |
- |
|||||||
|
s6 |
* |
|||||||
|
stari |
|
|||||||
|
s1 |
0 |
- |
- |
0 |
|
|||
|
s2 |
0 |
0 |
- |
- |
|
|||
|
s3 |
1 |
1 |
- |
- |
|
|||
|
s4 |
1 |
- |
- |
* |
|
|||
c)Reducerea numarului de stari ale matricei primitive (Construirea matricei reduse a starilor)
In aceasta etapa trebuie avut in vedere doua probleme:
-punerea in evidenta a starilor redundante
-reducerea efectiva a starilor echivalente prin unirea sau fuzionarea acestora dupa anumite reguli si obtinerea matricei reduse, care reprezinta de fapt forma echivalenta minimala a automatului initial. Aceasta etapa este absolut
obligatorie in cazul in care se cere proiectarea unui automat cu structura minimala.
Alipirea sau fuzionarea a doua linii ale matricei primitive caracterizate de starile stabile i si j , obtinandu-se o forma redusa devine posibila daca tranzitiile intre starile stabile i si j pentru o aceasi secventa de intrare aplicata conduc din ambele stari stabile spre o stare stabila urmatoare unica k.Alipirea trebuie sa mai respecte un criteriu suplimentar si anume cel al concordantei iesirilor.In acest fel procesul de reducere sau minimizare se extinde si asupra structurii logice de generare a iesirilor.
Pentru a pune in evidenta toate alipirile sau fuzionarilie posibile intre doua sau mai multe linii ale matricei primitivese intocmeste poligonul alipirilor sau fuzionarilor. Acest poligon are in varfuri starile stabile ale automatului, iar posibilitatile de alipire intre acestea sunt marcate prin segmente de dreapta. Se poate demonstra ca forma echivalenta minima nu este unica.deasemenea o stare neredusa continuta intr-un contur poligonal interior sau exterior poligonului alipirilor nu ami poate face parte dintr-un alt contur poligonal.poligonul alipirilor este urmatorul:
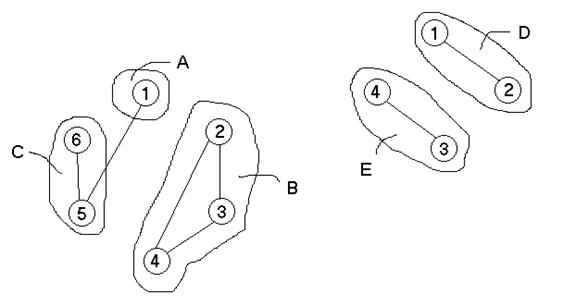
Varianta de alipiri este urmatoarea:
A(1) ,B(2,3,4) ,C(5,6) ,D(1,2) ,E(3,4)
Maricele reduse ale starilor sunt urmatoarele:
|
stari | ||||||||
|
|
- |
- |
- |
2 |
- |
- |
- |
|
|
|
5 |
- |
- |
- |
- |
|||
|
|
- |
3 |
- |
- |
- |
- |
|
stari | ||||
|
|
3 |
- | ||
|
|
- |
1 |
d)Codificarea starilor matricei reduse
Aceasta etapa creaza premisele obtinerii functiilor de excitatie .Ea se refera la codificarea univoca a starilor fuzionate ale matricei reduse a starilor. In cazul general daca prin reducerea numarului de stari se obtin q stari reduse sunt necesare p variabile de stare astfel incat 2p=>q.
Pentru a evita aparitia hazardului de tranzitie este necesarsa se interzica toate tranzitiile care presupun modificarea a mai mult de o variabila de stare. Astfel se evita aparitia curselor critice care pot conduce la tranzitii interstari incorecte si la semnale false la iesire. Rezulta urmatorul principiu de codificare a starilor:
-codificarea trebuie facuta astfel incat tranzitiile interstari sa aiba loc doar intre stari codificate adiacent
Pentru a pune in evidenta toate tranzitiile interstarise intocmeste poligonul tranzitiilor. In nodurile acestui poligon se plaseaza starile reduse , iar prin segmente de dreapta orientate se marcheaza tranzitiile dintre starile fuzionate. O tranzitie intre starile i si j poate fi marcata in poligonul tranzitiilor numai daca in locatiile corespondente de pe una dintre coloanele matricei reduse a starilor apare una din situatiile:
|
|
k |
|
k |
Avand in vedere cele de mai sus rezulta urmatoarea codificare a starilor:
sk xy
|
A(1) |
00 |
|
B(2,3,4) |
01 |
|
C(5,6) |
11 |
|
- |
10 |
sk z
|
D(1,2) |
0 |
|
E(3,4) |
1 |
|
xy | ||||||||
|
|
- |
- |
- |
2 |
- |
- |
- |
|
|
|
5 |
- |
- |
- |
- |
|||
|
|
- |
3 |
- |
- |
- |
- |
||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
z | ||||
|
|
3 |
- | ||
|
|
- |
1 |
e)Determinarea matricei tranzitilor starilor si obtinerea functiilor de excitatie ale automatului
Matricele tranzitiilor starilor sau diagramele de excitatie se obtin din matricea redusa si codificata a starilor , prin inlocuirea in aceasta a fiecarei stari stabile prin codul ei si a fiecarei stari instabile prin codul starii stabile corespunzatoare. Numarul matricelor de excitatie este egal cu numarul functiilor de excitatie ale automatului.
|
xy | ||||||||
|
00 |
- |
- |
- |
00 |
01 |
- |
- |
- |
|
01 |
01 |
11 |
- |
01 |
01 |
- |
- |
- |
|
11 |
11 |
11 |
- |
01 |
- |
- |
- |
- |
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
xy | ||||||||
|
|
- |
- |
- |
0 |
0 |
- |
- |
- |
|
01 |
0 |
1 |
- |
0 |
0 |
- |
- |
- |
|
|
1 |
1 |
- |
0 |
- |
- |
- |
- |
|
|
- |
- |
- |
- |
- |
- |
- |
- |
![]()
![]()
![]() X=c2 + xc1
X=c2 + xc1
|
xy | ||||||||
|
|
- |
- |
- |
0 |
1 |
- |
- |
- |
|
|
1 |
1 |
- |
1 |
1 |
- |
- |
- |
|
|
1 |
1 |
- |
1 |
- |
- |
- |
- |
|
|
- |
- |
- |
- |
- |
- |
- |
- |
|
z | ||||
|
|
0 |
1 |
- |
0 |
|
|
1 |
1 |
- |
0 |
![]()
Z=h2 +h1z
f)Determinarea matricelor iesirilor si a functiilor de iesire
|
xy | ||||||||
|
|
- |
- |
- |
0 |
0 |
- |
- |
- |
|
|
1 |
1 |
- |
1 |
1 |
- |
- |
- |
|
11 |
0 |
0 |
- |
0 |
- |
- |
- |
- |
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
![]()
|
h1h2 z | ||||
|
|
0 |
0 |
- |
0 |
|
|
1 |
1 |
- |
1 |
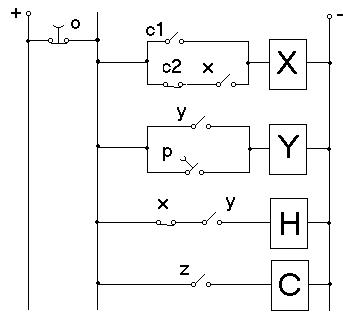
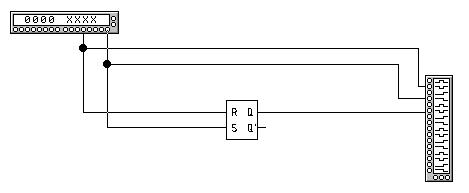
g)Implementarea functiilor logice obtinute
Implementarea cu relee
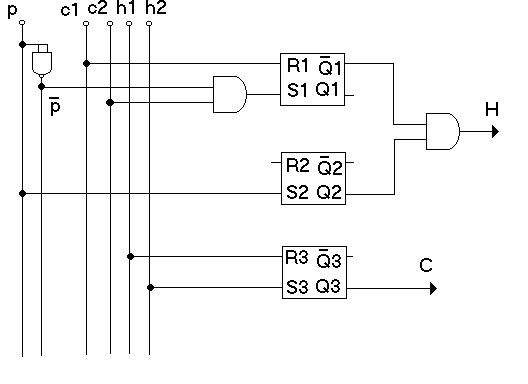
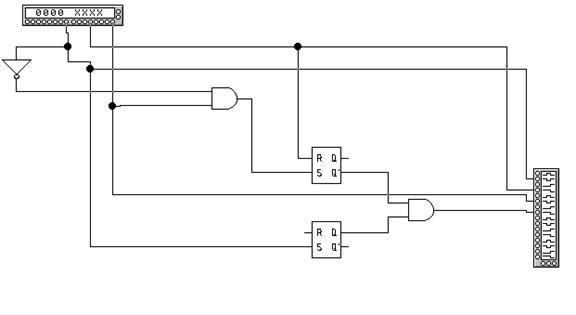
Implementarea cu circuite bistabile
Pentru aceasta este necesara determinarea functiilor de control (de excitatie) ale CBB din blocul de memorie, deternaminarea deci a reactiilor schemei secventiale. Tabelele functiilor de control se obtin particularizandu-seatbelul trantitiilor starilor la tipul de CBB utilizat pentru implementare.
Notatii:
x=Qt1 y=Qt2
X=Q1t+1 Y=Q2t+1
Aceleasi notatii sunt intoduse si in matricele starilor.Transpunerea matricelor tranzitiilor in tabelele de excitatie ale bistabilului se face pe baza relatiilor de functionare ale bistabilului utilizat, sau tabela de excitatie a acestuia.
![]()
Qt =S+RQt
|
QtQt+1 |
RS |
|
00 |
*0 |
|
01 |
01 |
|
10 |
10 |
|
11 |
0* |
|
Qt1,2 | ||||||||
|
|
- |
- |
- |
* |
* |
- |
- |
- |
|
01 |
* |
0 |
- |
* |
* |
- |
- |
- |
|
11 |
0 |
0 |
- |
1 |
- |
- |
- |
- |
|
|
- |
- |
- |
- |
- |
- |
- |
- |
R1=c1
![]()
|
pc1c2 Qt1,2 | ||||||||
|
00 |
- |
- |
- |
* |
0 |
- |
- |
- |
|
01 |
0 |
0 |
- |
0 |
0 |
- |
- |
- |
|
11 |
0 |
0 |
- |
0 |
- |
- |
- |
- |
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
![]() R2=0
R2=0
|
pc1c2 Qt1,2 | ||||||||
|
|
- |
- |
- |
0 |
0 |
- |
- |
- |
|
01 |
0 |
1 |
- |
0 |
0 |
- |
- |
- |
|
11 |
* |
* |
- |
0 |
- |
- |
- |
- |
|
|
- |
- |
- |
- |
- |
- |
- |
- |
![]() S1=pc2
S1=pc2
|
Qt1,2 | ||||||||
|
00 |
- |
- |
- |
0 |
1 |
- |
- |
- |
|
01 |
* |
* |
- |
* |
* |
- |
- |
- |
|
11 |
* |
* |
- |
* |
- |
- |
- |
- |
|
|
- |
- |
- |
- |
- |
- |
- |
- |
S2=p
![]()
|
pc1c2 Qt1,2 | ||||||||
|
00 |
- |
- |
- |
0 |
0 |
- |
- |
- |
|
|
1 |
1 |
- |
1 |
1 |
- |
- |
- |
|
11 |
0 |
0 |
- |
0 |
- |
- |
- |
- |
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
![]()
H=Qt1Qt2
|
Qt3 | ||||
|
|
* |
0 |
- |
* |
|
|
0 |
0 |
- |
1 |
R3=h1
|
Qt3 | ||||
|
|
0 |
1 |
- |
* |
|
|
* |
* |
- |
0 |
S3=h2
![]()
|
h1h2 Qt3 | ||||
|
|
0 |
0 |
- |
0 |
|
|
1 |
1 |
- |
1 |
C=Qt3
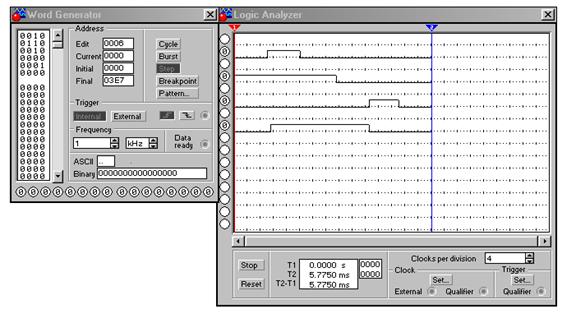
h)Analiza schemei
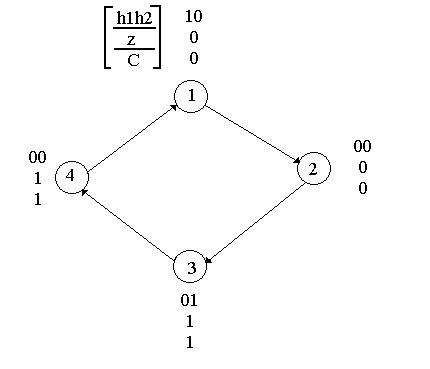
Analiza functionarii schemei de comanda poate fi urmarita din graful de functionare:
Analiza schemei de comanda a cilindrului H
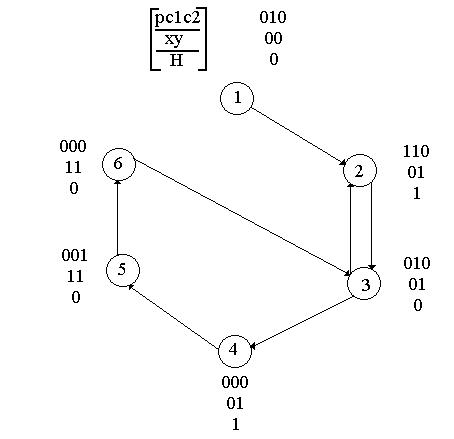
Se observa ca ajungand in ultima stare a ciclului prin ciclul se poate relua automat de la starea 3, sau manual prin apasarea butonului p.Iesirea din ciclu se poate face in orice moment prin apasarea butonului o.
Analiza schemei de comanda a cilindrului C
|
Politica de confidentialitate |
| Copyright ©
2026 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |


