
Comanda automata in instalatiile electroenergetice
1. Introducere. Clasificare
Un mare volum de automatizare este afectat comenzii automate in instalatiile electroenergetice.
In instalatiile electroenergetice automatizarea are multiple aplicatii. Particularitatile procesului de productie, transport si distributie a energiei electrice impun un grad sporit de automatizare. Astfel:
1. Producerea si consumul de energie electrica si caldura se efectueaza practic simultan, fara a fi posibila crearea unor rezerve de energie electrica, pe masura necesitatilor. De aceea, agregatele generatoare trebuie sa urmareasca permanent cerintele consumatorilor.
2. intreruperea furnizarii energiei electrice poate determina mari pierderi in toate ramurile economiei nationale; se cere un grad sporit de siguranta in functionarea sistemelorenergetice.
3. Un sistem energetic integrat are elemente repartizate pe spatii foarte intinse, care se confunda - de fapt - cu teritoriul tarii.
4. Cerintele de calitate a energiei sunt tot mai mari (frecventa, tensiunea, pretul de cost).
5. Fiind multe instalatii in paralel, iar procesele tranzitorii si scurtcircuitele desfasurandu-se cu mare rapiditate, efectele lor se pot rasfrange cu usurinta asupra intregului ansamblu al sistemului energetic integrat.
Dupa cum s-a vazut sistemele de comanda automata sunt sisteme in circuit deschis, comandate de marimea de intrare si nu de eroare (sau abatere); de aceea, ele sunt lipsite de posibilitatea de a verifica daca marimea de la iesire a atins sau nu valoarea dorita. Datorita simplitatii, sunt indicate in realizarea comenzilor automate, care nu reclama precizia unei reglari automate (de exemplu pentru anclansarea si declansarea intrerupatoarelor in centrale si statii electrice, pentru pornirea si oprirea grupurilor generatoare, motoarelor sau compresoarelor sincrone).
In conditiile dezvoltarii si cresterii complexitatii instalatiilor electroenergetice, comanda automata trebuie sa rezolve si probleme privind cuplarea la bare a generatoarelor si compensatoarelor (sincronizarea automata), cresterea sigurantei in exploatarea SE prin izolarea defectelor sau avariilor, reducerea duratei intreruperilor si restabilirea alimentarii consumatorilor (instalatiile de protectii prin relee, dispozitivele de reanclansare automata rapida, anclansarea automata a rezervei, descarcarea automata a sarcinii la scaderea frecventei), dispozitive automate pentru cresterea stabilitatii SE, s.a.
Utilizarea sistemelor de comanda automata in instalatiile electroenergetice prezinta multiple avantaje:
elimina (sau reduce in mare masura) interventia operatorului uman, si in consecinta, scade probabilitatea erorilor de manevra
reduce timpul de executie a comenzilor
solicitarile electrice si termice ale masinilor sincrone si ale aparatajului de inalta tensiune sunt minime.
In aceasta parte a cursului vor fi prezentate, dintre sistemele, dispozitivele si instalatiile de comanda automata mentionate, cele care realizeaza:
sincronizarea automata a masinilor sincrone
reanclansarea automata rapida
descarcarea automata a sarcinii si reanclansarea automata a sarcinii
dispozitive automate de pornire a grupurilor din centrale
dispozitive pentru separarea automata a SE interconectate
2. Sincronizarea automata a masinilor sincrone
Una din cele mai importante probleme din exploatarea centralelor electrice este aceea privind cuplarea in paralel a masinilor sincrone (generatoare si compensatoare sincrone).
Operatia de a aduce un generator sincron in situatia de a fi cuplat in paralel cu un altul, sau cu un SE, pornind din momentul cand generatorul are o turatie mult diferita de turatia sincrona si cand tensiunea sa electromotoare este mult diferita de cea corespunzatoare functionarii sale in gol, pana in momentul anclansarii intreruptorului prin care infasurarile statorului se conecteaza la barele de tensiune se numeste operatie de sincronizare. Ea are doua etape:
Operatia preliminara cuplarii (reprezentand reglarea parametrilor ce intervin inprocesul de sincronizare); ea consta, deci, in aducerea marimilor electrice caracteristice (tensiune, frecventa, faza) la valorile necesare pentru a se putea comanda inchiderea intreruptorului de cuplare a masinii sincrone.
Operatia de cuplare in paralel - care consta in comandarea inchiderii intreruptorului in momentul cel mai convenabil pentru a reduce la minimum solicitarile electrice si mecanice a aparatajului si masinii sincrone.
Executata automat, operatia de sincronizare prezinta avantajele reducerii duratei de sincronizare, cresterii sigurantei si micsorarii sensibile a solicitarilor electrice si termice ale instalatiilor din centrale.
Ansamblul de dispozitive care servesc pentru sincronizarea automata a masinilor sincrone formeaza sincronizatorul automat. Corespunzator celor doua tipuri de operatii, descrise mai sus, sincronizatorul automat pentru realizarea asa-numitei 'sincronizari totale', ar urma sa cuprinda: regulatorul de sincronizare (care executa operatiile de aducere a masinii sincrone in conditiile necesare cuplarii) si aparatul de cuplare automata (care sa realizeze, automat, comanda pentru anclansarea intreruptorului de cuplare la bare a masinii sincrone, astfel incat anclansarea sa se faca in momentul optim, cand solicitarea generatorului este minima). Deoarece, de regula, dispozitivele pentru reglare lipsesc, aparatul de punere in paralel este cel denumit, evident impropriu, sincronizator automat, iar sincronizarea realizata de acesta este o sincronizare partiala.
2.1. Cuplarea la bare a generatorului sincron excitat
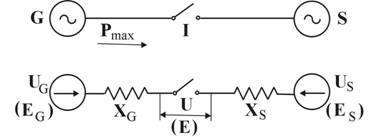
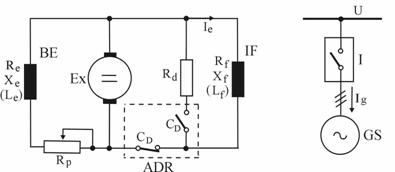
Sa consideram cazul unui generator sincron G ce se cupleaza pe un sistem electric S. Sistemul la care se cupleaza generatorul se considera ca si in calculul de scurtcircuit ca fiind reprezentat printr-un generator echivalent, avand caracteristicile mecanice asemanatoare cu generatorul ce se sincronizeaza (numar de ture, numar de poli).
![]()
S-au notat:
![]() Tensiunea eficace, pe faza, la bornele
generatorului G.
Tensiunea eficace, pe faza, la bornele
generatorului G.
![]() Valoarea maxima a t.e.m. pe
faza, la generator
Valoarea maxima a t.e.m. pe
faza, la generator
U Tensiunea maxima rezultanta, la bornele unui pol al intreruptorului
![]() Tensiunea eficace rezultanta, la bornele
unui pol al lui l
Tensiunea eficace rezultanta, la bornele
unui pol al lui l
![]() t.e.m. maxima pe faza a sistemului S
t.e.m. maxima pe faza a sistemului S
![]() Pulsatia tensiunii generatorului
Pulsatia tensiunii generatorului
![]() Pulsatia tensiunii sistemului
Pulsatia tensiunii sistemului
![]() Pulsatia
rezultanta
Pulsatia
rezultanta
![]() Reactanta
pe faza a generatorului ce se cupleaza
Reactanta
pe faza a generatorului ce se cupleaza
![]() Reactanta
pe faza a sistemului
Reactanta
pe faza a sistemului
![]() Unghiul electric dintre tensiunea
generatorului si cea a sistemului
Unghiul electric dintre tensiunea
generatorului si cea a sistemului
![]() Puterea electrica activa maxima
circulata intre generator si sistem.
Puterea electrica activa maxima
circulata intre generator si sistem.
Inainte de inchiderea intreruptorului l valoarea instantanee a tensiunii rezultante la bornele acestuia va fi:
![]() , unde (1)
, unde (1)
![]()
![]()
Se noteaza
; ![]() ,
, ![]() , deci:
, deci:
![]() (2)
(2)
Modulul si argumentul (faza) acestei tensiuni vor fi: (fig. 2)
![]() (3)
(3)
![]() (4)
(4)
Cu ajutorul acestor relatii se poate calcula in orice moment valoarea instantanee a tensiunii rezultante u in functie de valorile t.e.m. pe faza a generatorului si a sistemului echivalent.
Relatiile presupun UG ≠ US , ωG ≠ ωS ,φ ≠ 0 deci, cazul cel mai general posibil.
In practica insa se intalnesc si unele cazuri particulare care conduc la simplificarea relatiilor de mai sus.
CAZUL 1
UG = US
ωG = ωS
deci tensiuni egale, in faza. Rezulta:U =0; μ = ωGt si prin urmare, tensiunea rezultanta va fi: u = 0 - cazul cel mai favorabil pentru efectuarea cuplarii la bare.
CAZUL 2
UG ≠ US
ωG = ωS
deci tensiuni diferite dar in faza. Rezulta: U = UG - US , = ωGt , deci tensiunea rezultanta:
![]() (7)
(7)
Se obtine, deci, o tensiune rezultanta avand amplitudinea egala cu diferenta algebrica a tensiunilor electromotoare ale generatorului si sistemului si pulsatia egala cu aceea a tensiunii generatorului.
CAZUL 3
UG = US
ωG ≠ ωS (8)
deci, tensiuni egale, in faza, dar de pulsatii (frecvente) diferite. Rezulta pentru acest caz:
![]() (9)
(9)
![]() (10)
(10)
Valoarea instantanee a tensiunii rezultante (considerata ca proiectie a fazorului pe axa imaginara) va fi data de relatia:
![]() (11)
(11)
In concluzie, pulsatia rezultanta este semisuma pulsatiilor tensiunilor generatorului si celei a sistemului. Amplitudinea tensiunii rezultante nu are o valoare constanta, ci este data de o functie periodica de timp, cu pulsatia egala cu semidiferenta pulsatiilor tensiunilor generatorului si sistemului. In fig.3 este reprezentata tensiunea rezultanta u, cunoscuta si sub denumirea de tensiune de batai.
UG = US
ωG = ωS (12)
deci, cazul in care tensiunile nu sunt in faza.
Rezulta ca modulul tensiunii rezultante u va avea valoarea:
![]() (13)
(13)
iar argumentul va avea expresia:
![]() (14)
(14)
Amplitudinea U variaza cu unghiul de defazaj si va fi maxima
pentru ![]()
CAZUL 5
UG ≠ US
ωG ≠ ωS (15)
deci tensiuni diferite, dar in faza.
Tensiunea rezultanta va avea modulul:
![]()
si argumentul:
![]() (17)
(17)
Se observa ca atat modulul cat si argumentul tensiunii rezultante sunt functii de timp.
CAZUL 6
UG ≠ US
ωG = ωS (18)
deci tensiuni diferite dar de frecvente egale.
Modulul tensiunii rezultante este:
![]() (19)
(19)
cu
valoarea maxima pentru ![]() , Umax =
UG + US si cu valoarea minima pentru
, Umax =
UG + US si cu valoarea minima pentru ![]() , Umin = UG - US.
, Umin = UG - US.
Argumentul este dat de relatia:
![]() (20)
(20)
Pentru ca solicitarea generatorului in momentul cuplarii sa fie minima, trebuie sa rezulte un curent de circulatie, cu caracterul unui curent de soc, cat mai mic posibil.
Cazul ideal corespunde valorii zero a acestui curent, ceea ce se realizeaza numai atunci cand: U = O, deci UG=US ,ωG=ωS si φ = 0 . Cele trei conditii exprima in fond egalitatea tensiunilor, a frecventelor si a fazelor.
Daca nu sunt indeplinite, in totalitate, conditiile de mai sus in momentul cuplarii, generatorul este solicitat de un curent de soc, echivalent cu un curent de scurtcircuit la bornele generatorului, cu expresia:
 (21)
(21)
Unde x'G , x'S sunt reactantele supratranzitorii relative, iar factorul 1,8 tine seama de existenta unei componente aperiodice.
Se poate vedea ca curentul de soc depinde de valoarea eficace a tensiunii rezultante, deci va fi diferit pentru conditii de cuplare diferite.
In cazul 2 curentul de soc este destul de mic pentru abateri insemnate ale tensiunilor. El este curent pur reactiv, decalat cu 90° fata de tensiunea rezultanta pe care o produce. Puterea de soc solicitata generatorului va fi numai putere reactiva.
Pentru
cazul 4 valoarea maxima a curentului se produce la ![]() . Se poate vedea ca in acest caz,
curentul de soc atinge valori mult mai mari. Totodata se cere de la
generator in momentul cuplarii si putere
activa, care va fi maxima pentru
. Se poate vedea ca in acest caz,
curentul de soc atinge valori mult mai mari. Totodata se cere de la
generator in momentul cuplarii si putere
activa, care va fi maxima pentru ![]() atingand repede acest maxim. Ea va solicita puternic masina primara,
putand duce in unele situatii, la avarierea acesteia.
atingand repede acest maxim. Ea va solicita puternic masina primara,
putand duce in unele situatii, la avarierea acesteia.
Pentru cazurile 3-5 ca si in cazul cel mai general, de inegalitate a tuturor marimilor, va exista si o diferenta intre turatia generatorului si cea a sistemului cu care acesta se pune in paralel.
In cele ce urmeaza, vom considera cazul 5 drept cel mai general (inegalitatea tensiunilor, frecventelor cu diferenta de faza nula). De asemenea, se va admite ca in momentul cuplarii turatia generatorului ce se cupleaza este mai mare decat turatia masinii echivalente pentru sistemul energetic (cuplare in regim suprasincron).
Unghiul electric δ dintre fazorii tensiunii generatorului si a sistemului este:
![]() ;
; ![]()
Ecuatia echilibrului dinamic la arborele agregatului generator este:
![]() (22)
(22)
in care:
MA - este cuplul mecanic, dat de masina primara de antrenare;
MR - este cuplul mecanic rezistent, datorat frecarilor la arbore,
ME - este cuplul datorat puterii electrice active, debitata sau consumata.
Masi este cuplul asincron determinat de curentii indusi in infasurarea de excitatie. Acest cuplu variaza proportional cu viteza de variatie a unghiului electric 8 si are o valoare medie constanta in intervalul
MI
este cuplul datorat inertiei, cu expresia ![]() (23)
(23)
Daca se considera ca in momentul cuplarii la bare, agregatul nu este supus unei acceleratii unghiulare, ceea ce inseamna ca puterea debitata de motorul primar (de antrenare) serveste numai la mentinerea in functionare la turatie constanta, se poate admite egalitatea: MA = MR astfel incat ecuatia devine:
![]() (24)
(24)
Ecuatia de mai sus permite sa se determine
analitic variatia unghiului electric ![]() , in momentul cuplarii si imediat dupa
cuplare, ca si limita admisibila a variatiei acestui unghi.
Pentru aceasta, se elimina termenul de amortizare, proportional cu
viteza de variatie a unghiului
, in momentul cuplarii si imediat dupa
cuplare, ca si limita admisibila a variatiei acestui unghi.
Pentru aceasta, se elimina termenul de amortizare, proportional cu
viteza de variatie a unghiului ![]() , considerandu-se Mas
max = 0 si se integreaza ecuatia rezultanta:
, considerandu-se Mas
max = 0 si se integreaza ecuatia rezultanta:
![]() (25)
(25)
considerand ca generatorul este antrenat, in
momentul cuplarii, la o viteza suprasincrona si ca
aceasta cuplare se produce la t = t0,
cand ![]() si reprezentand
grafic variatia cuplulului sincron ME
si a pulsatiei relative:
si reprezentand
grafic variatia cuplulului sincron ME
si a pulsatiei relative: ![]() , in functie de
, in functie de ![]() se obtin curbele
din fig.4.
se obtin curbele
din fig.4.
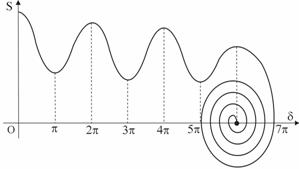
La t = t0, , ![]() , cuplul sincron este
pozitiv, iar cuplul de inertie negativ, deci masele in rotatie se vor
decelera (generatorul G debiteaza putere). Pe masura ce t creste,
, cuplul sincron este
pozitiv, iar cuplul de inertie negativ, deci masele in rotatie se vor
decelera (generatorul G debiteaza putere). Pe masura ce t creste, ![]() scade (deci
scade (deci ![]() g se apropie de
g se apropie de ![]() ) si
) si ![]() creste, dar din
ce in ce mai incet.
creste, dar din
ce in ce mai incet.
Punctul
de functionare a de pe curba ![]() se deplaseaza
spre
se deplaseaza
spre ![]() , adica spre punctul b reprezentat
pe curba (pentru care
, adica spre punctul b reprezentat
pe curba (pentru care ![]() ). Apoi, pe masura ce timpul creste,
). Apoi, pe masura ce timpul creste, ![]() incepe sa
scada spre valoarea initiala
incepe sa
scada spre valoarea initiala ![]() , iar
, iar ![]() scade si mai
mult, trecand in domeniul pulsatiilor negative. Cand punctul de
functionare revine in a, din
cauza inertiei, el se deplaseaza spre
scade si mai
mult, trecand in domeniul pulsatiilor negative. Cand punctul de
functionare revine in a, din
cauza inertiei, el se deplaseaza spre ![]() negativ (la viteze
subsincrone ale generatorului). Atunci, cuplul sincron devine negativ
(generatorul trece in regim de motor), masele in rotatie incep sa se
accelereze, pulsatia relativa
negativ (la viteze
subsincrone ale generatorului). Atunci, cuplul sincron devine negativ
(generatorul trece in regim de motor), masele in rotatie incep sa se
accelereze, pulsatia relativa ![]() creste si
revine din nou la 0 (corespunzator minimului din c). Apoi, punctul de functionare revine in 0 si
creste si
revine din nou la 0 (corespunzator minimului din c). Apoi, punctul de functionare revine in 0 si ![]() creste pana
ce, dupa cateva oscilatii se stabileste un punct pentru care
creste pana
ce, dupa cateva oscilatii se stabileste un punct pentru care ![]() si
si ![]() , deci se stabileste functionarea sincrona.
, deci se stabileste functionarea sincrona.
Variatia
![]() reprezinta o
spirala.
reprezinta o
spirala.
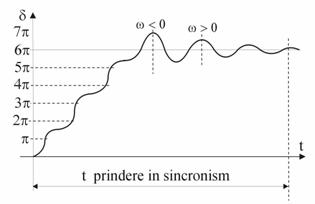
Pentru
un unghi ![]() (punctul b situat la dreapta lui
(punctul b situat la dreapta lui ![]() ), functionarea generatorului se schimba; cuplul sincron ME devine negativ, generatorul trece in regim de motor,
masele in rotatie incep sa se accelereze marindu-si viteza
pana cand se ajunge in punctul
), functionarea generatorului se schimba; cuplul sincron ME devine negativ, generatorul trece in regim de motor,
masele in rotatie incep sa se accelereze marindu-si viteza
pana cand se ajunge in punctul ![]() , generatorul
continuand sa lucreze in regim asincron. Desi la unghiul
, generatorul
continuand sa lucreze in regim asincron. Desi la unghiul ![]() generatorul incepe sa debiteze din nou putere
activa in retea, punctul de functionare nu se poate stabili nici
la
generatorul incepe sa debiteze din nou putere
activa in retea, punctul de functionare nu se poate stabili nici
la![]() , deoarece puterea ceruta de la generator in acest
interval nu este suficienta spre a-l aduce la o viteza egala cu
viteza sistemului. Urmeaza alte cateva oscilatii, dupa care se
stabileste un regim permanent de functionare asincron, ducand la
deteriorarea posibila a generatorului din cauza curentilor
indusi in infasurarea de excitatie, infasurarea
de amortizare si fierul rotoric. Variatia
, deoarece puterea ceruta de la generator in acest
interval nu este suficienta spre a-l aduce la o viteza egala cu
viteza sistemului. Urmeaza alte cateva oscilatii, dupa care se
stabileste un regim permanent de functionare asincron, ducand la
deteriorarea posibila a generatorului din cauza curentilor
indusi in infasurarea de excitatie, infasurarea
de amortizare si fierul rotoric. Variatia ![]() in acest caz este redata in fig.5.
in acest caz este redata in fig.5.
2.2. Metode de sincronizare automata
Pentru
ca regimul tranzitoriu la cuplarea in paralel sa fie cat mai scurt, iar
variatia ![]() cat mai
amortizata, pentru ca lsoc
sa nu depaseasca limitele admise si schimbul de
putere activa si curentul de circulatie intre generator si
sistem sa se stabilizeze dupa trecerea regimului tranzitoriu, la o
valoare cat mai mica, trebuie sa se asigure o cat mai buna
egalitate a tensiunilor si a frecventelor in momentul cuplarii,
iar unghiul electric
cat mai
amortizata, pentru ca lsoc
sa nu depaseasca limitele admise si schimbul de
putere activa si curentul de circulatie intre generator si
sistem sa se stabilizeze dupa trecerea regimului tranzitoriu, la o
valoare cat mai mica, trebuie sa se asigure o cat mai buna
egalitate a tensiunilor si a frecventelor in momentul cuplarii,
iar unghiul electric ![]() sa fie cat mai
apropiat de zero (sau de un multiplu al lui
sa fie cat mai
apropiat de zero (sau de un multiplu al lui ![]() ).
).
Nu se incearca obtinerea unei egalitati perfecte si simultane a acestor marimi spre a nu lungi nepermis durata procesului de sincronizare.
Exista doua metode de sincronizare:
a) metode de
sincronizare automata precisa, care realizeaza o egalizare precisa in limite stranse, a
marimilor electrice respective. Cuplarea se face numai la: ![]() . . Aceste metode necesita un timp mai
lung si aparataj complicat.
. . Aceste metode necesita un timp mai
lung si aparataj complicat.
b) metode de sincronizare automata
aproximativa (sau de autosincronizare) - nu cer decat o egalizare aproximativa
a tensiunilor si respectiv, frecventelor, permitand cuplarea la
orice valoare a unghiului electric ![]() ; aparatajul este mult
mai simplu, timpul de sincronizare mai scurt dar se pot produce solicitari
mari ale generatorului si sistemului, in general.
; aparatajul este mult
mai simplu, timpul de sincronizare mai scurt dar se pot produce solicitari
mari ale generatorului si sistemului, in general.
A. Sincronizarea automata precisa
Se considera drept 'precisa' operatia de sincronizare automata pentru care, in momentul cuplarii, marimile electrice respective iau cel mult valorile relative urmatoare:
![]() (26)
(26)
![]() (27)
(27)
Care pentru f* = 50Hz devine:
![]()
![]() (28)
(28)
si:
![]() , sau
, sau ![]() (unde K =
1,2,3,,n)
(unde K =
1,2,3,,n)
In
cazul sincronizarii automate precise, inchiderea contactelor
intrerupatorului general trebuie sa se faca exact in momentul in
care unghiul ![]() are valoarea de mai
sus, dupa ce in prealabil au fost satisfacute conditiile privind
egalitatea tensiunilor si egalitatea frecventelor. Pentru aceasta,
dispozitivul de sincronizare automata trebuie sa dea comanda de
inchidere a intreruptorului cu un timp bine determinat inainte de momentul
dorit pentru cuplare.
are valoarea de mai
sus, dupa ce in prealabil au fost satisfacute conditiile privind
egalitatea tensiunilor si egalitatea frecventelor. Pentru aceasta,
dispozitivul de sincronizare automata trebuie sa dea comanda de
inchidere a intreruptorului cu un timp bine determinat inainte de momentul
dorit pentru cuplare.
Dupa felul cum se realizeaza anticiparea comenzii de inchidere a intreruptorului fata de momentul de inchidere, dispozitivele de sincronizare se clasifica in:
a) sincronizatoare
cu unghi constant de anticipare la care
comanda de inchidere a intreruptorului se da masurandu-se un
unghi electric constant de anticipare ![]() fata de
momentul cand unghiul electric
fata de
momentul cand unghiul electric ![]() ia valorile
ia valorile ![]() , sau
, sau ![]() (unde K = 1,2,3,,n)
(vezi fig. 6)
(unde K = 1,2,3,,n)
(vezi fig. 6)
b)
sincronizatoare cu timp constant de anticipare la care comanda de inchidere a intreruptorului se da
cu un timp constant de anticipare ta
(fig.7) fata de momentul cand unghiul ![]() ia valorile de mai sus
(timp ce corespunde de fapt, timpului
propriu al aparatajului).
ia valorile de mai sus
(timp ce corespunde de fapt, timpului
propriu al aparatajului).
Inchiderea
se face intr-unul din punctele A, indiferent de pulsatie, dar unghiul de
anticipare variaza. Se poate scrie: ![]() , unde tintr
este timpul propriu al intreruptorului, trs
este timpul propriu al releelor din schema dispozitivului de sincronizare.
, unde tintr
este timpul propriu al intreruptorului, trs
este timpul propriu al releelor din schema dispozitivului de sincronizare.
![]()
Corespunzator celor doua clase de metode, exista sincronizatoare automate cu unghi constant de anticipare si sincronizatoare automate cu timp constant de anticipare.
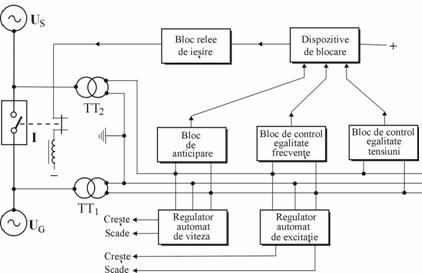
In figura 8 este prezentata schema bloc a dispozitivelor de sincronizare automata.
Pentru determinarea momentului anticiparii comenzii de anclansare a intreruptorului, trebuie sa se tina seama de urmatoarea particularitate a sincronizarii automate.
In timpul reglarii turatiei generatorului sincron in vederea
egalizarii frecventelor, pulsatia rezultanta ![]() a
infasuratoarei variaza. In aceste conditii, pentru o
valoare anumita a timpului propriu ts de
anclansare a intreruptorului generatorului, exista o singura
valoare optima a pulsatiei,
a
infasuratoarei variaza. In aceste conditii, pentru o
valoare anumita a timpului propriu ts de
anclansare a intreruptorului generatorului, exista o singura
valoare optima a pulsatiei, ![]() pentru care
inchiderea contactelor intreruptorului se face in momentul dorit.
pentru care
inchiderea contactelor intreruptorului se face in momentul dorit.
Din fig.9 se vede ca ![]() nu este egal cu
nu este egal cu ![]() , decat pentru
, decat pentru ![]() Atunci cand
Atunci cand ![]() , se obtine o eroare de timp, reprezentand
diferenta de timp intre momentul in care ar trebuie sa se
inchida intreruptorul si momentul in care se inchide in realitate.
Aceasta eroare de timp este:
, se obtine o eroare de timp, reprezentand
diferenta de timp intre momentul in care ar trebuie sa se
inchida intreruptorul si momentul in care se inchide in realitate.
Aceasta eroare de timp este:
 (29)
(29)
Pentru:
![]() ;
; ![]() , deci
, deci ![]()
![]() ;
; ![]() , deci
, deci ![]() (30)
(30)
![]() ;
; ![]() , deci
, deci ![]()
Efectul erorii de timp in cazul diverselor
valori ale lui ![]() in raport cu
in raport cu ![]() este evidentiat
in figura 9. Astfel, in primul caz inchiderea
intreruptorului se face dupa momentul dorit (comanda de anclansare se
da in a1, dar inchiderea se produce in A'1
pe portiunea ascendenta a curbei de variatie a tensiunii
rezultante). Cand
este evidentiat
in figura 9. Astfel, in primul caz inchiderea
intreruptorului se face dupa momentul dorit (comanda de anclansare se
da in a1, dar inchiderea se produce in A'1
pe portiunea ascendenta a curbei de variatie a tensiunii
rezultante). Cand ![]() comanda se da in
a3 si cuplarea se produce in A'3, la
comanda se da in
a3 si cuplarea se produce in A'3, la ![]() inainte de momentul
dorit (sau optim), dar pe portiunea
descendenta a curbei tensiunii. In primul caz, pentru A'1
se obtin valori ale tensiunii E (sau U) la cuplare periculos de mari
(deci, si curenti de egalizare inadmisibil de mari). De aceea,
cuplarea pentru
inainte de momentul
dorit (sau optim), dar pe portiunea
descendenta a curbei tensiunii. In primul caz, pentru A'1
se obtin valori ale tensiunii E (sau U) la cuplare periculos de mari
(deci, si curenti de egalizare inadmisibil de mari). De aceea,
cuplarea pentru ![]() nu este permisa.
In al doilea caz
nu este permisa.
In al doilea caz ![]() pentru A'3
rezulta valori relativ mici ale tensiunii rezultante
(deci si ale curentului de soc), astfel ca anclansarea este
permisa.
pentru A'3
rezulta valori relativ mici ale tensiunii rezultante
(deci si ale curentului de soc), astfel ca anclansarea este
permisa.
Cazul optim este ![]() cand comanda de
anclansare se da in a2 si inchiderea se produce in A'2=A2
(
cand comanda de
anclansare se da in a2 si inchiderea se produce in A'2=A2
(![]() ) .
) .
In concluzie, sincronizatoarele automate se concep astfel
incat cuplarea sa se produca numai pentru ![]() .
.
B. Sincronizarea automata aproximativa
Sincronizarea automata precisa nu este indicata, in special, in regimurile de avarii in sistem, cand frecventa oscileaza (se produc pendulari de energie) si tensiunea scade mult, cu toate interventiile pentru restabilirea manuala sau automata a acesteia. Dar, tocmai in astfel de situatii cuplarea rapida a grupurilor generatoare iesite din paralel este foarte necesara pentru restabilirea functionarii si asigurarii continuitatii in producerea de energie electrica.
Autosincronizarea reprezinta o metoda de sincronizare automata aproximativa care prevede cuplarea la bare a generatorului, adus la o turatie apropiata de turatia sincrona, dar neexcitat, urmand ca prinderea in sincronism sa se produca, dupa ce, ulterior cuplarii, se aplica tensiunea de excitatie.
Deoarece
in momentul cuplarii generatorul este dezexcitat, deci nu debiteaza
in retea, nu exista pericolul unui soc important mecanic ca
urmare a unei cuplari gresite (de pilda in vecinatatea lui ![]() ) si nu intervin limitari, in acest sens, pentru
unghiul
) si nu intervin limitari, in acest sens, pentru
unghiul ![]() . Cuplarea se poate efectua, rapid, la valori mari ale
alunecarii s (de exemplu, de la cateva procente pana la 15 - 20%),
simplificandu-se in mare masura procesul de egalizare a
frecventelor. Ca urmare, hidrogeneratoarele pot fi cuplate chiar in timpul
operatiei de pornire, ceea ce reduce considerabil durata procesului de
cuplare in paralel si asigura interventia rapida a unor
agregate suplimentare, in cazul unor situatii deficitare in sistem.
. Cuplarea se poate efectua, rapid, la valori mari ale
alunecarii s (de exemplu, de la cateva procente pana la 15 - 20%),
simplificandu-se in mare masura procesul de egalizare a
frecventelor. Ca urmare, hidrogeneratoarele pot fi cuplate chiar in timpul
operatiei de pornire, ceea ce reduce considerabil durata procesului de
cuplare in paralel si asigura interventia rapida a unor
agregate suplimentare, in cazul unor situatii deficitare in sistem.
Dispozitivele pentru autosincronizare si aparatura conexa sunt relativ simple, prezinta un grad sporit de fiabilitate in exploatare si asigura calitatea operatiilor de cuplare in paralel prin sincronizare automata aproximativa.
S-au stabilit urmatoarele conditii pentru autosincronizare:
a) curentul de soc prin generator, in momentul cuplarii,sa fie limitat la 3,5 lgnom ;
b) scaderea tensiunii pe barele sistemului in momentul inchiderii intrerupatorului generatorului, sa nu intreaca (30% - 40%)Unom .
In caz contrar, apar curenti de soc mari, tensiuni reduse si cuplarea poate fi ratata. Durata cat tensiunea este redusa trebuie sa fie mica pentru a se asigura autopornirea motoarelor asincrone, In figura 10 s-a reprezentat schema de reactante pentru un generator G cuplat prin autosincronizare cu sistemul SE, prin intermediul unei reactante de legatura (de exemplu, un transformator ridicator) xt. Reactanta generatorului xG reprezinta reactanta longitudinala tranzitorie x'd si este egala cu suma reactantelor de scapari ale statorului si rotorului; ea determina curentul statoric de cuplare. Reactanta echivalenta a sistemului este xs. Se considera: Us = 1,05 Unom ca fiind tensiunea maxima de regim a sistemului SE. Se poate scrie:

![]()
Pentru generatoarele sincrone, ![]() ; se constata, deci, o reducere
sensibila a curentului de circulatie, intre momentul
cuplarii la bare si momentul intrarii in sincronism a
generatorului G. Relatia de mai sus poate fi transcrisa in
unitati relative nominale:
; se constata, deci, o reducere
sensibila a curentului de circulatie, intre momentul
cuplarii la bare si momentul intrarii in sincronism a
generatorului G. Relatia de mai sus poate fi transcrisa in
unitati relative nominale:
![]() (32)
(32)
In cazul cel mai defavorabil pentru xS*=0 (SE de putere infinita) si xT*=0 (G debiteaza direct pe barele sistemului) conditia devine:
![]() (33)
(33)
 Cum pentru
hidrogeneratoare
Cum pentru
hidrogeneratoare ![]() , inseamna ca acestea pot fi cuplate prin
autosincronizare, indiferent de valorile
, inseamna ca acestea pot fi cuplate prin
autosincronizare, indiferent de valorile
reactantei sistemului si a elementelor de legatura dintre generator si bare.
In
cazul turbogeneratoarelor, ele avand ![]() , sunt necesare elemente de cuplare intre generator si bare
(transformatoare, bobine de reactanta) care sa asigure
indeplinirea conditiei de mai sus si sa faca posibila
utilizarea metodei de autosincronizare.
, sunt necesare elemente de cuplare intre generator si bare
(transformatoare, bobine de reactanta) care sa asigure
indeplinirea conditiei de mai sus si sa faca posibila
utilizarea metodei de autosincronizare.
In cazul autosincronizarii generatoarelor, ecuatiile echilibrului dinamic a masinii sincrone se modifica. Daca in cursul sincronizarii precise, la alunecari sub 1% s-a admis egalitatea MA=MR, acum, pentru cuplari la valori mari ale alunecarii (pana la 10%), la care regulatorul de turatie nu a intrat inca in functiune, trebuie sa se tina seama ca MA ≠ MR, deci ΔM = MA - MR ≠ 0; rotorul masinii sincrone poate fi supus in momentul cuplarii, unei acceleratii pozitive sau negative, datorata cuplului ΔM.
In literatura se dezvolta teoria atragerii in
sincronism la cuplarea prin autosincronizare. Se stabileste alura
variatiei alunecarii ![]() -fig.11 - si a
unghiului electric
-fig.11 - si a
unghiului electric ![]() - fig.12 in cazul unei
autosincronizari reusite; punctele de pe aceste curbe s-au determinat
prin iteratii, folosind relatii de recurenta. Se
mentioneaza existenta unor relatii empirice pentru
determinarea alunecarii de cuplare limita s0, pentru masini sincrone simetrice.
- fig.12 in cazul unei
autosincronizari reusite; punctele de pe aceste curbe s-au determinat
prin iteratii, folosind relatii de recurenta. Se
mentioneaza existenta unor relatii empirice pentru
determinarea alunecarii de cuplare limita s0, pentru masini sincrone simetrice.
Dispozitivele de autosincronizare
trebuie sa comande anclansarea intreruptorului prin care generatorul
se cupleaza la bare, la o valoare data a alunecarii sau inainte
de atingerea acestei valori; de aceea, ele contin diferite elemente de
masurare a alunecarii(releu de viteza,

|
Politica de confidentialitate |
| Copyright ©
2026 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |