LANTURI CINEMATICE PENTRU MISCARI AUXILIARE - MASINI-UNELTE
Lanturile cinematice pentru miscari auxiliare servesc pentru realizarea de miscari ce nu sunt incluse direct in schema procesului de aschiere, avand deci un rol secundar. Aceste lanturi cinematice se clasifica dupa o serie de criterii cum ai fi: dupa rolul functional in cadrul masinii-unelte (de pozitionare, de divizare, de alimentare cu semifabricate etc.), dupa natura elementelor componente, dupa sistemul de actionare si de comanda, dupa legaturile cu alte lanturi cinematice etc.
Tabelul 9 Mecanisme de actionare mecanica cu variatie continua
|
Nr. crt. |
Denumirea mecanismului |
Descriere, caracteristici |
|
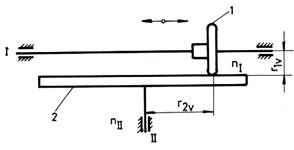
Mecanism cu roata plana si rola deplasabila |
Mecanismul realizeaza un raport de transmitere variabil in functie de pozitia rolei 1 (care se poate deplasa in lungul arborelui motor I) fata de centrul rotii plane 2, montate pe arborele condus II.
Mecanismul permite si inversarea turatiei la arborele II prin deplasarea rolei peste centrul rotii plane. Domeniul de reglare al turatiei este Rn = 4.6. |
|
|
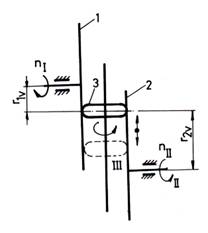
Mecanism cu discuri si roata de frictiune |
Mecanismul este compus din discurile 1 si 2 (montate pe arborii motori I si II) intre care se gaseste roata de frictiune 3, care se poate deplasa in lungul arborelui III.
Turatia arborelui condus II variaza in functie de pozitia rotii de frictiune fata de centrele celor doua discuri (r1v si r2v). Domeniul de reglare al turatiei este Rn = 4. |
Tabelul 9 (continuare)
|
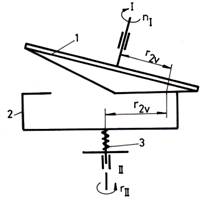
Mecanism cu disc conic |
Mecanismul este compus dintr-un disc conic 1 fixat direct pe arborele I al motorului electric si o roata cilindrica frontala 2, fixata pe arborele II.
Arcul 3 are rolul de a asigura contactul intre cele doua elemente de transmitere. Valoarea turatiei la arborele II depinde de valorile razelor r1v si r2v si se realizeaza un raport de reglare Rn = 4. Mecanismul se utilizeaza la MU de putere mijlocie (MU de gaurit verticale). |
|
|
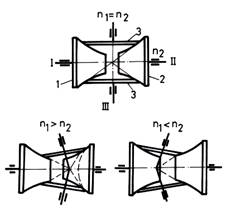
Mecanism cu discuri de forma speciala |
Mecanismul este format din discurile motor 1 si condus Suprafata de lucru ale discurilor au o forma speciala (tor). Rotile de frictiune 3 iau contact cu discurile prin deplasarea sincronizata a arborilor acestora, montati in dispozitivul de comanda.
Mecanismul are un domeniu de reglare relativ mare (Rn = 4.8) si poate transmite puteri foarte mari (pana la 25 kW). Mecanismul se utilizeaza la cutiile de viteza la MU grele (strunguri, freze etc.). |
Tabelul 9 (continuare)
|
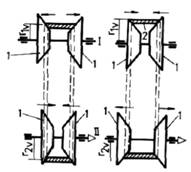
Mecanism cu discuri conice duble si curea de transmitere |
Mecanismul este compus din doua perechi de discuri conice identice 1 montate pe arborii motor I si condus II.
Discurile se pot deplasa axial sincronizat (in sensuri opuse). Intre cele patru discuri se aseaza o curea de transmitere de transmitere 2, care face contact cu acestea pe suprafetele laterale. Deoarece latimea si lungimea curelei sunt constante, razele r1v si r2v vor fi determinate de distanta dintre discuri. Mecanismul are raportul de reglare a turatiilor Rn = 10 si transmite puteri de pana la (3.4) kW, fiind utilizat la MU ca strunguri revolver, MU de gaurit etc. |
7.1. Lanturi cinematice de pozitionare
Acesta categorie de lanturi cinematice efectuaza pozitionarea necesara dintre scula aschietoare si semifabricat inainte de inceperea prelucrarii sau intre diferite operatii. Pentru reducerea timpului auxiliar corespunzator, vitezele de pozitionare sunt mai mari decat vitezele miscarilor de avans de lucru. De asemenea, in general, se impune stabilirea preciziei de pozitionare a organelor de lucru.
In practica se utilizeaza:
- lanturi cinematice de pozitionare independente;
- elemente de comutare independente;
- scheme cu mecanism diferential;
- scheme de insumare prin mecanisme surub-piulita.
Lanturi cinematice de pozitionare independente (24) pot functiona in regim de avans sau de pozitionare, sistemul de actionare fiind prevazut, in general, cu un motor M, surub conducator SC, rigla gradata R sau tanmbur gradat TG si organul de lucru OL.
In figura 24 se prezinta schematic trei tipuri de lanturi cinematice de pozitionare independente: cu actionare mecanica, cu actionare manuala si respectiv cu actionare prin doua elemnte de intrare.
Pentru a se obtine pozitionari precise (fig. 24, a) cuprinde motorul de actionare M, functioneaza in regim de tatonare sau se prevede cu un sistem de actionare manuala.
Lanturile cinematice actionate manual (fig. 24, b) cuprind roata de mana RM, tamburul gradat TG cu reperul I2 pentru masurarea fractiunilor de milimetru si rigla gradata R cu reperul I1 pentru masurarea deplasarilor grosiere.
Fig. 24. Lanturi cinematice de pozitionare independente
a - cu actionare mecanica;
M - motor de actionare; R - reductor; SC - surub conducator; OL - organ de lucru; nsc - turatia surubului conducator; psc - pasul surubului conducator; vr - viteza de reglare;
b - cu actionare manuala;
RM roata de mana; TG tambur gradat; SC - surub conducator; OL - organ de lucru; I1 - reper pentru masurarea deplasarilor grosiere; I2 - reper pentru masurarea fractiunilor de milimetru; R - rigla gradata;
c cu actionare manuala prin doua elemente de intrare;
RM roata de mana; TG tambur gradat; SC - surub conducator; OL - organ de lucru; I1 - reper pentru masurarea deplasarilor grosiere; I2 - reper pentru masurarea fractiunilor de milimetru;
R - rigla gradata; C cuplaj.
O alta schema utilizata in cadrul lanturilor cinematice de pozitionare o constituie sistemele de legatura avans-pozitionare prin intermediul mecanismului surub-piulita (fig. 25). In acest caz se practica doua variante constructive:
- Sisteme cu surub conducator si doua sanii suprapuse (fig. 25, a) avand in componenta sania suplimentara SL, la care sunt atasate lagarele surubului conducator SC. Avansul de lucru AL se obtine prin rotatia surubului conducator, iar deplasarea rapida AR se realizeaza prin translatia lagarelor surubului conducator, impreuna cu sania SL.
- Sisteme cu transmiterea miscarii la surubul conducator SC si la piulita P (fig. 25, b) care permit obtinerea miscarii de avans de lucru AL prin rotatia SC, respectiv deplasarea rapida a organului de lucru OL prin rotatia simultana a SC si P.
Fig. 24. Sisteme de legatura avans-pozitionare prin mecanism surub-piulita
a cu surub conducator si doua sanii suprapuse;
LA - lant cinematic de avans; LR - lant cinematic pentru deplasari rapide (de pozitionare); SC - surub conducator; SL - sanie de pozitionare; OL - organ de lucru; AL - avansul de lucru;
AR - deplasarea rapida; z - roata dintata baladoare;
b cu transmiterea miscarii la surubul conducator si la piulita;
LA - lant cinematic de avans; LR - lant cinematic pentru deplasari rapide (de pozitionare);
SC - surub conducator; P - piulita; OL - organ de lucru; AL - avansul de lucru; AR - deplasarea rapida; z, z - roti dintate; n1 - turatia surubului conducator; n2 - turatia piulitei.
7. Lanturi cinematice de divizare
NU
In figura 25 sunt prezentate criteriile de clasificare a lanturilor cinematice de divizare.
Fig. 25. Clasificarea lanturilor cinematice de divizare.
Fig. 26. Structura lantului cinematic de divizare:
a - divizare prin comutarea lantului; b - divizare prin insumarea a doua miscari;
LC, LC , LC lant cinematic; MD - mecanismul de divizare; L1, L2 - legaturi;
Df diferential; I - indexor; D - disc de divizare; ND - numarul de rotatii la divizare;
AD, BD - roti de schimb; n, n1, n2 - turatii.
Pentru realizarea divizarii fara intreruperea lantului cinematic se utilizeaza schema cu diferential (fig. 26, b).
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |