MISCARI SI AXE CINEMATICE UTILIZATE LA MASINI UNELTE
Miscarile mașinilor unelte
Prelucrarea completa a unei piese pe MU impune realizarea unui numar minim de miscari, ce se succed intr-o anumita ordine si care se repeta ciclic la prelucrarea oricarei alte piese de acelasi tip.
Miscarile necesare sunt: - miscari de generare
- miscari auxiliare
Miscarile de generare sunt executate de MU si se executa in timpul procesului de prelucrare.
Miscarile auxiliare sunt executate in afara procesului de prelucra si sunt executate la MU neautomate de catre operatorul uman. Ele se mai numesc si miscari ajutatoare, sau in gol. Ele sunt: alimentate cu piese, alimentarea cu scule, transportul semifabricatelor, reglarea lanturilor cinematice, pozitionarea reciproca piesa-scula, comutari (comenzi) si protectia MU si a operatorului uman. Ele se pot repeta o singura data in ciclu sau de mai multe ori.
Miscarile de generare sau de executare dupa rolul lor in diferitele faze ale ciclului de lucru se denumesc astfel:
pentru formarea suprafetelor
de patrundere
de divizare sau periodice
ajutatoare
si sunt realizate de catre scule, piese sau ambele.
Miscarea executanta poate fi:
libera sau independenta - cand viteza sa este dictata de parametrii tehnologici sau de functionare. Poate fi liniara (L) sau rotativa (R). Ex: miscarea L la brosare.
elementara sau componenta , cand valorile vitezei sale sunt corelate cu vitezele altei miscari, dependenta dictata de conditiile tehnologice sau de functionare. Ex: MP+MAv la gaurire.
compusa - cand rezulta din compunerea a doua, trei sau patru miscari elementare. Traiectoriile relative ale miscarii compuse sunt curbe complexe in spatiu.
Miscarile executate sunt efectuate de catre anumite subansamble sau subsisteme denumite generic verigi executante. (port cutite, arbori principali, mese, sanii, suporti).
Ciclul de lucru reprezinta totalitatea miscarilor de generare necesare prelucrarii unei piese pe MU sau un sistem de MU.
Ciclul de functionare reprezinta ansamblul miscarilor de generare si miscarilor auxiliare necesare pentru prelucrarea unei piese pe o MU.
Realizarea curbelor de generare (la masini unelte) sau a curbelor dupa care se face manuirea obiectelor la (roboti industriali) necesita, in majoritatea cazurilor, actiunea combinata a mai multor organe mobile care efectueaza miscari pe traiectorii rectilinii sau circulare usor realizabile prin intermediul cuplelor cinematice de tip ghidaj-sanie sau fus-lagar.
Miscarile care au loc pe traiectorii materializate si care concura, prin actiunea lor concertata, la generarea cinematica a unei curbe dictata de un proces de prelucrare sau de manuire poarta denumirea de miscari elementare sau miscari de baza
Fiecare miscare este caracterizata de parametri de spatiu si de timp, numiti parametrii de miscare.
Parametrii de spatiu ai miscarii includ:
forma si lungimea traiectoriei;
viteza si directia de deplasare pe traiectorie;
punctul initial sau inceputul miscarii;
pozitionarea traiectoriei in diferite sisteme de referinta fixe si mobile.
Miscarile se apreciaza in timp, prin doi parametrii:
momentul initial al miscarii, absolut sau relativ fata de o alta miscare, caracterizeaza pozitia miscarii intr-un ciclu de miscari;
natura miscarii, caracterizeaza, prin diferite legi de variatie, continuitatea sau intermitenta miscarii.
Fiecare parametru de miscare trebuie descris cantitativ si calitativ. Informatiile cu aspect cantitativ arata, la un moment dat, valorile parametrului (pozitie, viteza, etc.), iar cele cu aspect calitativ descriu variatia in timp a valorilor initiale.
In vederea realizarii unei miscari oarecare de executie este necesara o corelatie precisa a miscarilor elementare independente. In astfel de situatii numarul parametrilor utilizati pentru evaluarea miscarilor de baza efectuate de un sistem de corpuri este foarte mare. Acest fapt are influienta directa asupra complexitatii sistemului de comanda si a strategiei de conducere a acestuia.
|
|
|
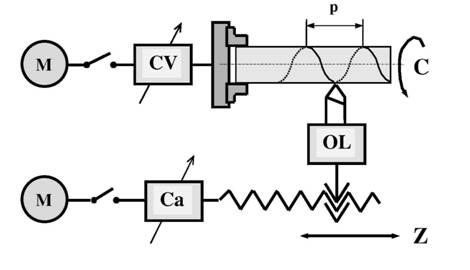
Figura 1 Generarea unei miscari operative elicoidale cu doua miscari elementare izolate |
Spre exemplificare se considera generarea suprafetei filetului la filetarea cu cutit profilat. In acest caz este necesara o singura miscare elicoidala a cutitului fata de semifabricatul considerat fix. Cel mai frecvent, insa filetarea se executa prin rotirea semifabricatului si deplasarea sculei dea lungul piesei (figura 1).
Nici una ditre aceste doua miscari nu asigura in mod independent formarea suprafetei date. De aceea aceste doua miscari elementare trebuie supuse unor constrangeri invocate de miscarea elicoidala de executie:
(1)
Daca se executa mai multe treceri de filetare este necesara deplasarea sculei, la fiecare trecere, pe aceasi elice.
Mentinerea sculei, pe curba elicoidala generata la prima trecere, se poate realiza in doua moduri:
prin inversarea miscarii principale, caz in care ultima relatie a sistemului (1) asigura repozitionarea directoarei;
fara inversarea miscarii principale.
Situatia a doua presupune readucerea sculei la inceputul filetului numai prin inversarea miscarii de avans, care constituie o miscare auxiliara (rapida), desfasurata in afara procesului de prelucrare, dupa o lege de miscare descrisa de o ecuatie de forma:
![]()
Pentru repozitionarea directoarei este necesar ca pentru fiecare trecere i, pozitiei z0, asociata inceputului filetului, sa-i corespunda aceeasi pozitie unghiulara si aceeasi viteza initiala Vz0 , coincidente descrise de relatiile:
![]() (3)
(3)
Analizand relatiile (1), (2) si (3) se constata necesitatea adoptarii unui sistem complex si a unei strategii adecvate pentru comanda celor doua miscari.
Realizarea unei legaturi cinematice rigide (figura 2) intre axele celor doua miscari elementare (o singura sursa de miscare) conduce la eliminarea relatiilor (1) avand ca efect simplificarea sistemului de comanda. Problemele legate de pozitionarea traiectoriei elicoidale a miscarii operative se rezolva prin mentinerea inchisa a 'mecanismului rigid de miscari' pe toata durata filetarii.
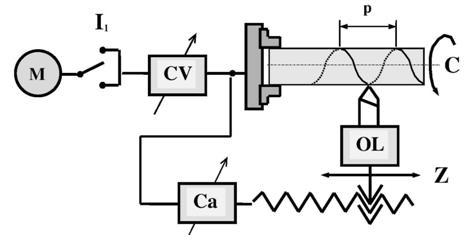
Figura 2 Generarea unei miscari operative elicoidale cu un mecanism rigid de miscari elementare
Daca, in cazul masinilor unelte, realizarea unor curbe complexe implica frecvent actiunea corelata a doua, uneori a trei miscari elementare, la roboti industriali numarul miscarilor elementare care participa la generarea unei curbe complexe este, in general mult mai mare. Pe langa acest fapt, gradul ridicat de universalitate a robotilor presupune realizarea, in spatiul de lucru, a unor miscari operative pe diverse traiectorii. Din aceasta cauza la roboti se utilizeaza, aproape exclusiv, surse izolate pentru fiecare miscare elementara.
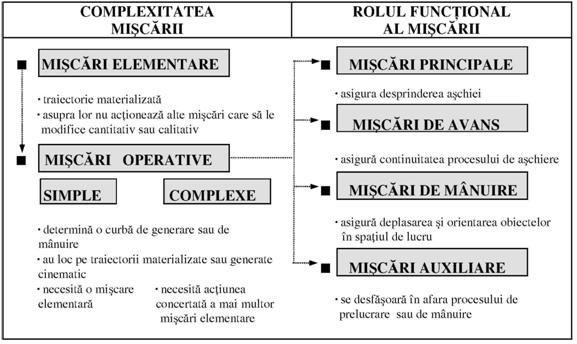
O clasificare, revelatoare (din punct de vedere a cercetarilor), a miscarilor valabila atat pentru masini unelte cat si pentru roboti industriali, ia in considerare urmatoarele doua criterii:
complexitatea miscarii;
rolul functional al miscarilor.
Clasificarea miscarilor, caracteristicile lor definitorii si conexiunile care apar intre diferitele tipuri de miscari sunt prezentate sintetic in tabelul 1.
Clasificarea miscarilor Tabelul 1
2 Definirea si clasificarea axelor cinematice. Conceptul de axa cinematica
Conceptul de axa cinematica a aparut odata cu masinile cu comanda numerica. La aceste masini realizarea curbelor de generare se face prin programarea unor miscari elementare care se efectueaza dupa axele sistemului de coordonate a masinii. Intreaga structura cinematica care contribuie la realizarea unei miscari elementare al carui vector are ca suport o axa a sistemului de coordonate al masinii a condus la definirea notiunii de axa cinematica.
In literatura de specialitate denumirea de axa cinematica este utilizata, in general, pentru axele cinematice comandate numeric.
Luind in considerare tendintele existente in constructia masinilor unelte si a robotilor, precum si simbolizarea miscarilor elementare efectuate de organele mobile ale acestora, apare necesitatea redefinirii conceptului axa cinematica.
LANTUL CINEMATIC reprezinta:
- Totalitatea mecanismelor care concura la obtinerea unei miscari cu caracteristici impuse, prin transmiterea si transformarea unei miscari date .
Totalitatea mecanismelor care realizeaza transmiterea si transformarea miscarii de la motor la organul de lucru.
Sirul verigilor care servesc la transmiterea, transformarea si reglarea miscarii intre surse de miscare si verigi executante sau numai intre verigi executante.
AXA CINEMATICA reprezinta:
Axa cinematica este formata din sursa primara de miscare, totalitatea mecanismelor prin care se transmite fluxul de miscare si elementul final mobil.
Axa cinematica reprezinta, din punct de vedere cinematic, constructiv si al echipamentului de comanda, un ansamblu mecanic, mecatronic sau de alta natura care realizeaza o miscare elementara
3 Clasificarea axelor cinematice
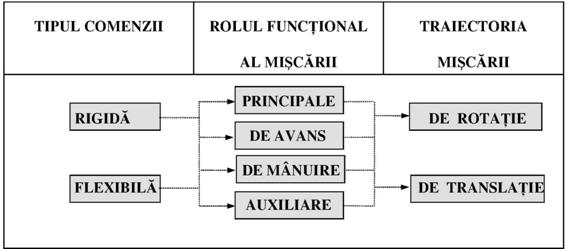
Clasificarea axelor cinematice, din punct de vedere a prezentei lucrari,considera urmatoarele trei criterii:
Tipul comenzii, in sensul flexibilitatii ei;
Rolul functional al miscarii pe care o genereaza;
Traiectoria miscarii.
Pe baza criteriilor de mai sus in tabelul 3 se prezinta clasificarea axelor cinematice.
Clasificarea axelor cinematice Tabelul 3
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |