SERVOMOTOARE SINCRONE REACTIVE
1 Generalitati :
Servomotorul sincron reactiv este o masina cu reluctanta variabila, de constructie asemanatoare cu a unui servomotor asincron la care rotorul este format din poli aparenti fara excitatie in curent continuu.
Micromotoarele sincrone cu reluctanta variabila, mMS-RV, sau micromotoare sincrone reactive, sunt masini sincrone cu rotatie continua care prezinta o varia]ie accentuata a reluctan]ei magnetice de-a lungul circumferintei intrefierului si la care rotorul nu poseda sistem de excitatie. Sunt caracterizate de existenta unei diferente insemnate intre reluctantele dupa axele d si q rotorice, axa d fiind aici (in absenta fluxului de excita]ie rotoric) asociat cu directia de reluctanta minima. In aceste mM se produce un camp magnetic rotitor care este determinat doar de solenatia infasurarii statorice, polifazate.
Cuplul dezvoltat de mMS-RV este un cuplu de reluctanta , iar conversia electromecanica se bazeaza pe faptul ca reactantele utile ale infasurarii statorice variaza in functie de pozitia unghiulara a rotorului anizotrop. Cuplul specific al unui mMS-RV nu poate atinge decat cel mult 1/2 din cuplull unei masini sincrone similare, cu excitatie. Performantele mMS-RV depind de variatia maxima de reluctanta realizata de-a lungul circumferintei intrefierului.
Ca orice motor sincron, mMS-RV functioneaza cu viteza constanta, ![]() rpm , in intregul domeniu al cuplului de sarcina, viteza sa fiind
determinata riguros de frecventa tensiunii de alimentare
rpm , in intregul domeniu al cuplului de sarcina, viteza sa fiind
determinata riguros de frecventa tensiunii de alimentare ![]() si de numrul de
perechi de poli p realizat constructiv; la frecvente de regim normal nu
dezvolta cuplul de pornire sincron,
si de numrul de
perechi de poli p realizat constructiv; la frecvente de regim normal nu
dezvolta cuplul de pornire sincron, ![]() = 0, iar cuplul
produs in regim de sincronism este limitat la o valoare maxima,
= 0, iar cuplul
produs in regim de sincronism este limitat la o valoare maxima, ![]() , a carei depasire de catre cuplul rezistent
, a carei depasire de catre cuplul rezistent ![]() conduce la iesirea din sincronism, decrosare si pierderea
stabilitatii de functionare.
conduce la iesirea din sincronism, decrosare si pierderea
stabilitatii de functionare.
Masinile folosite ca receptoare in dispozitivele de cuplaj sincron fac parte din clasa masinilor reactive sincrone fara bobinaj special de excitatie. Lasand la o parte diferitele tipuri care nu au in prezent o raspandire larga vom examina mai intai doua dintre tipurile principal folosite in sisteme care functioneaza la frecventa variabila:
servomotoarele
reactive cu bobinaje concentrate
ale statorulni (cu poli
aparenti ai statorului);
servomotoarele reactive cu bobinaje statorice distribute.
Pe langa acestea, vom mai examina alte masini sincrone destinate actionarii mecanismelor cu turatie strict sincrona (ceasornice electrice, unele dispozitive de legatura etc.). In aceasta categorie, intra si motoarele reactive reductoare.
Servomotoarele sincrone reactive pentru instalatiile de automatizare se construiesc pentru puteri utile mici, cuprinse intre fractiuni de watt si zeci de wati, iar cele pentru actionari - si pentru puteri mai ridicate, de ordinul sutelor de wati. La puteri mai mari, acest tip de servomotor nu mai este economic, atat din punct de vedere ai gabaritului, cat si al randamentului si factorului de putere.
Constructiv, servomotoarele sincrone reactive sunt asemanatoare cu cele asincrone si practic se obtin din ultimele, folosind statoarele si schimband doar rotoarele. Puterea unui servomotor sincron reactiv reprezinta circa 3540% din puterea motorului asincron din care a rezultat.
Statorul va fi, in consecinta, confectionat din tole de otel electrotehnic si prevazut cu crestaturi in care se dispune bobinajul statoric. Rotorul este intotdeauna executat cu poli aparenti, fie din otel masiv, prin frezarea unor crestaturi interpolare intr-o piesa cilindrica, fie din tole de otel electrotehnic, izolate intre ele si prevazute cu colivii de amortizare si pornire.
Rotoarele pot fi obtinute prin frezare, dintr-un rotor de acelasi gabarit al unui motor asincron in scurtcircuit, sau prin asamblarea tolelor special stantate, urmata de introducerea barelor coliviei necesare amortizarii oscilatiilor pendulare si pornirii in asincron a servomotorului.
In Fig1 , se arata tolele rotorice ale unui servomotor reactiv, care pot fi considerate ca tipul de tole rotorice ale unui motor asincron in colivie, caruia i s-au suprimat o parte din dinti (rotor crenelat).
Pentru realizarea de permeante magnetice diferite dupa axele longitudinala si transversala, lucru indispensabil aparitiei cuplului sincron, se folosesc tole de otel de forma reprezentata in Fig. 2

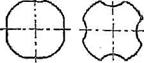
Fig. 1. Tole rotorice folosite la un motor reactiv Fig. Tola rotorica de motor reactiv
Unele tipuri de rotoare, cu aria sectiunii diferita, creeaza, in anumite conditii, cupluri egale de intrare in sincronism, in timp ce cuplurile de iesire din sincronism, care caracterizeaza capacitatea de incarcare a servomotorului, difera.
Caracteristici superioare, la functionarea in regim sincron si factori de putere mai ridicati, se obtin cu rotoare din placi de otel inglobate intr-o masa de material neferomagnetic (in general, aluminiu), ceea ce mareste raportul intre reactantele sincrone longitudinala si transversala (xd /xq). Executia unor astfel de rotoare, fie pentru masina tetrapolara, fie pentru masina bipolara, poate fi automatizata si este deci economica.
Valorile optime ale coeficientilor de acoperire polara si ale adancimilor crestaturilor interpolare, determinate experimental, sunt:
bp / /τp = 0,50,6; δmax / δ min = 10 12
Functionarea servomotoarelor sincrone reactive se bazeaza pe utilizarea cuplurilor ce se exercita in campurile magnetice asupra corpurilor feromagnetice, datorita carora rotorul este adus in permanenta in pozitia corespunzatoare reluctantei minime. Este evident ca, in cazul unui rotor perfect cilindric, datorita simetriei magnetice radiale, nu s-ar putea dezvolta nici un cuplu util. Aceasta constituie cauza principala ca acest tip de masina se executa numai cu rotor cu poli aparenti.
Rigurozitatea dependentei dintre turatie si frecventa tensiunii de alimentare (ns = 60 f / p) permite folosirea acestor servomotoare in sisteme de cuplaj sincron cu viteza unghiulara variabila, functionand la frecventa variabila. Ca surse de tensiune altenativa de frecventa variabila, se utilizeaza convertizoare, generatoare de curent alternativ cu colector, transformatoare asincrone de frecventa etc.
2 Servomotoare siocrone reactive cu rotatie continua trifazate cu bobinaj statoric distribuit
Servomotoarele reactive cu bobinaj statoric distribuit se deosebesc de masinile sincrone obisnuite prin aceea ca polii rotorului nu au bobinaje de excitatie. Asemenea servomotoare se folosesc pe scara larga in sistemele de legatura sincrona, care functioneaza cu o frecventa variabila, fapt care permite sa se varieze turatia rotorului.
1 Elemente constructive
Constructia mMS-RV este simpla si asemanatoare motoarelor asincrone, fata de care insa prezinta un intrefier marit. Pentru a beneficia de producerea campului magnetic rotitor mMS-RV se construiesc monofazate cu poli scindati (cu spire in scurtcircuit), bifazate (monofazate cu faza auxiliara si condensator, cu alimentare monofazata), sau trifazate. Deoarece in aplicatii de putere redusa sursa de alimentare in c.a. disponibila este uzual monofazata, primele doua variante constructive sunt frecvent utilizate. mMS-RV se pot construi si ca masini monofazate propriu-zise, cu camp magnetic pulsator, dar absenta cuplului de pornire de tip asincron le face inutilizabile in aplicatii curente.
Statorul mMS-RV contine un miez feromagnetic cilindric din tole de otel electrotehnic pe care este plasata infasurarea statorica. Constructia poate fi cu miez neted cu crestaturi longitudinale uniform distribuite, in care este plasata infasurarea polifazata repartizata sau miezul poate fi cu poli aparenti (si spire in scurtcircuit) caz in care infasurarea, monofazata, este concentrata.
Pentru a evita inchiderea unor curenti de armonici 3, 9 etc. produsi de efectul anizotropiei magnetice rotorice se recomanda evitarea conectarii infasurarii trifazate in triunghi.
Prin constructie, pe circumferinta rotorului se realizeaza un numar de perioade de variatie a reluctantei egal cu numarul de perechi de poli statorici. Anizotropia magnetica a rotorului se obtine in cateva moduri principale:
- prin constructia unui rotor feromagnetic cu poli proeminenti, cu intrefier marit in axa q, fig. 3.1 a, b; in fig.3.1, partea feromagnetica a rotorului este marcata prin reperul 1;
- prin constructia unui rotor neted, cu bariere de flux nemagnetice incluse, reperul 3 in fig.3.1 c, d, e, sau
- adoptand o solutie combinata intre acestea, fig. 3.1 f;
- se poate realiza de asemeni o constructie a rotorului din segmente fero si neferomagnetice, fig. 3.1 g.
Specifice gamei de puteri foarte
mici sunt variantele din fig.3.1 a, b, c, d si f. Valoarea obtinuta pentru raportul reactan]elor, ![]() poate ajunge la 0,2 -
0,1.
poate ajunge la 0,2 -
0,1.
Pentru a asigura pornirea si a imbunatati stabilitatea de functionare in sincronism a mMS-RV, se asigura prin constructie producerea unor cupluri de tip asincron. In acest scop rotorul este executat fie din otel electrotehnic masiv, fie din tole si prevazut cu o colivie de pornire si amortizare (reperul 2 in fig.3.1a,b,d,f); atunci cand se prevad bariere nemagnetice din aluminiu, bronz sau cupru, acestea sunt scurtcircuitate la capete cu inele continue (sau segmente de inele) si au functia unui circuit in colivie. Constructia mMS-RV se remarca in general prin simplitate tehnologica si pret redus.
Gama de puteri nominale pentru care se construiesc MS-RV porneste de la mMS de zeci de watt pana la masini de medie putere de zeci de kilowatt.
mMS-RV prezinta, in principiu, pentru factorul de putere valori reduse fata de mM sincrone cu excitatie. Valorile nominale ale factorului de putere, randamentului, precum si dimensiunile de gabarit ale mMS-RV sunt similare cu cele ale masinilor asincrone de putere echivalenta, cu care se compara.
Alimentarea mMS-RV de la convertoare statice de tensiune-frecventa face posibila functionarea lor cu valori diferite ale vitezei, ajustarea vitezei, pornirea cu frecventa redusa, sau functionarea cu viteza ridicata prin alimentare cu frecventa inalta. Reglarea vitezei mMS-RV se realizeaz prin alimentarea cu frecventa variabila, cu mentinerea constanta a raportului tensiune/frecventa si cu evitarea regimurilor dinamice care ar putea periclita stabilitatea functionarii.
mMS-RV se remarca printr-o serie de avantaje constand in constructie si tehnologie simpla (absenta sistemului de excitatie pe rotor, electromagnetica sau cu magneti permanenti), pret de cost scazut, precum si avantaje functionale si de exploatare: robustete, fiabilitate (absenta contactelor glisante, absenta problemelor de stabilitate a magnetilor permanenti etc.) pornire usoara in asincron (printr-o constructie adecvata, relativ simpla a rotorului), silentiozitate.
mMS-RV se folosesc in actionari in care se urmareste ca viteza de rotatie, fixa sau reglabila, a unui mecanism sa nu depinda de factori perturbatori ca variatii ale cuplului de sarcina sau variatii ale amplitudinii tensiunii de alimentare etc; de exemplu, pentru actionri cu viteza riguros constanta, in aparatura de inregistrare-redare audio-video, pompe etalonate folosite in industria chimica, aparatura medicala etc. Datorita silentiozitatii se folosesc pentru antrenarea ventilatoarelor de conditionare a aerului, din tehnica de calcul, sau din echipamentele electronice de putere.
Deoarece prin alimentarea de la convertoare statice de tensiune- frecventa pot beneficia de un anumit ajustaj al vitezei sunt adecvate pentru: sisteme de reglaj sincron, pentru actionari multiple realizate cu riguros aceeasi viteza si care necesita mai multe valori ale vitezei in timpul procesului tehnologic, intalnite in industria textila, a hartiei, laminatelor speciale, sticlei.
Se folosesc deasemeni pentru actionarea unor masini unelte pentru frezari si rectificari de mare viteza etc.
Ecuatii si caracteristici de functionare ale mMS-RV in regim
stationar
In cele ce urmeaza se ia in
consideratie un mMS-RV trifazat si se evidentiaza particularitaaile de functionare
ale acestuia in regim stationar sincron pornind de la ecuatiile (3.7)-(3.9) si
diagrama fazoriala din fig.1 ale motorului sincron trifazat, cu excitatie si
anizotropie, particularizate pentru excitatie absenta, IE = 0 (YEx = LmdIE = 0) si, in
consecinta, t.e.m. indusa in infasurarea statorica nula, ![]() .
.
Pentru regimul sincron de functionare se analizeaz ecuatiile de tensiuni, expresia cuplului electromagnetic, caracteristica unghiulara si expresia factorului de putere. In aceast analiza, se ia in consideratie rezistenta statorica de faza, R 0, care la puterile reduse, specifice micromotoarelor, are o pondere in raport cu reactantele ce nu mai poate fi neglijata, ca in cazul masinilor sincrone de medie si mare putere.
Ecuatiile de tensiuni in marimi transformate (3.7) se scriu in cazul mMS-RV in forma:
|
|
sau
|
|
Ecuatia de tensiuni exprimata cu fazori spatiali reprezentativi (3.11) devine:
|
|
Ii corespunde diagramei fazoriale din figura 3.
Componentele bifazate ortogonale ale curentului se exprima in functie de unghiul y conform (3.13), iar componentele tensiunii se exprima in functie de unghiul intern d0 conform (3.14):
astfel incat, expresiile (3.15) ale componentelor curentului devin:
|
|
Expresia cuplului electromagnetic de regim stationar, conform (3.9), pentru mMS-RV capata forma:
|
|
in care, introducand expresiile (4) ale componentelor Id si Iq se ob]ine:
|
|
Se utilizeaza marimile adimensionale
(3.17) - raport de anizotropie, ![]() si raport al
rezistentei statorice la reactanta sincrona longitudinala,
si raport al
rezistentei statorice la reactanta sincrona longitudinala, ![]() - si se adopta
exprimarea in unitati relative (per unit, p.u.) pentru cresterea gradului de
generalitate al analizei. Componentele de curent si respectiv cuplul
electromagnetic capata expresiile:
- si se adopta
exprimarea in unitati relative (per unit, p.u.) pentru cresterea gradului de
generalitate al analizei. Componentele de curent si respectiv cuplul
electromagnetic capata expresiile:
|
|
unde,
|
|
respectiv,
|
|
unde
|
M* = M/Mref [i Mref = (pm/w)(U2/Xd), |
Iref si Mref reprezinta marimea curentului, respectiv a cuplului de referinta.
Influenta parametrilor a , b , si e , asupra performantelor servomotoarelor reactive:
Informatii asupra functionarii mMS-RV sunt furnizate de caracteristica unghiulara, reprezentand dependenta cuplului electromagnetic in functie de unghiul intern, M (d0). Se constata ca aceasta caracteristica este influentata de valoarea raportului de anizotropie, a si de valoarea coeficientului rezistentei de faza statorice, b. Daca se particularizeaza expresia (9) pentru R = 0 (b = 0) se regaseste relatia caracteristicii unghiulare pentru motoarele reactive de medie si mare putere la care se neglijeaza valoarea rezistentei:
|
|
Valoarea maxima a cuplului, Mmax corespunde in acest caz unghiului d0 Mmax = p/4. In cazul general, in care se ia in considerare valoarea rezisten]ei statorice, R 0 (b 0), pentru a determina cuplul sincron maxim, Mmax de pe caracteristica unghiulara se rezolva mai intai ecua]ia:
(dM*/dd
respectiv
|
|
si se
gaseste unghiul intern ![]() pentru care acest maxim are loc. Astfel, marimile
pentru care acest maxim are loc. Astfel, marimile ![]() si Mmax se determin cu relatiile:
si Mmax se determin cu relatiile:
|
| |
|
|
:
M:
Expresiile (13), (14) definesc
coordonatele punctului M(![]() ) de maxim al caracteristicii unghiulare M(d0). Se mai determina punctul B, de intersectie a caracteristicii
cu axa ordonatelor:
) de maxim al caracteristicii unghiulare M(d0). Se mai determina punctul B, de intersectie a caracteristicii
cu axa ordonatelor:
|
|
B:
si punctul A, de intersectie cu axa absciselor:
|
|
A:
In figura 3.3 se prezinta
caracteristica unghiulara a cuplului (exprimat in p.u.), M*(d0) pentru a = 0,5 si mai multe valori ale coeficientului
rezistentei statorice b ( b = 0; 0,1; 0,2), ca parametru al
familiei de curbe. Se observa ca marirea ponderei rezistentei de faza
statorice R in raport cu reactanta Xd are drept efect micsorarea
cuplului sincron maxim, Mmax al motorului. In acelasi timp are loc
deplasarea spre stanga a punctului de maxim M, ceea ce inseamna micsorarea
valorii unghiului intern ![]() pentru care se atinge
decrosarea, deci micsorarea domeniului de func]ionare stabil a mMS-RV.
pentru care se atinge
decrosarea, deci micsorarea domeniului de func]ionare stabil a mMS-RV.
In figurile 3.4 si 3.5 se prezinta
dependentele cuplului maxim (in p.u.) ![]() functie de b,
conform (14), respectiv unghiului de rasturnare
functie de b,
conform (14), respectiv unghiului de rasturnare ![]() functie de b,
conform (13), ca familii de curbe pentru diverse valori ale raportului de
anizotropie, a < 1.
functie de b,
conform (13), ca familii de curbe pentru diverse valori ale raportului de
anizotropie, a < 1.
Se observa ca marirea rezistentei bobinajului statoric conduce la deplasarea spre stanga a caracteristicilor, deci la o micsorare a cuplului sincronizant, pentru regimul de motor si la marirea lui pentru regimul de generator, limitand domeniul de functionare in regim de motor al masinii.
Se
constata ca o crestere a coeficientului b conduce la scaderea cuplului
maxim, Mmax (Fig.3.4) si la o scadere a unghiului ![]() de limita a stabilitatii in functionare (Fig.3.5). Rezulta ca
o valoare marita a rezistentei R in raport cu reactanta Xd,
afecteaza negativ performantele mMS-RV si deci se recomanda reducerea rezistentei la valori
cat mai mici, prin masuri constructive.
de limita a stabilitatii in functionare (Fig.3.5). Rezulta ca
o valoare marita a rezistentei R in raport cu reactanta Xd,
afecteaza negativ performantele mMS-RV si deci se recomanda reducerea rezistentei la valori
cat mai mici, prin masuri constructive.
Se deduce deasemenea ca o
accentuare a anizotropiei (o micsorare a raportului a) conduce la
cresterea cuplului maxim ![]() (Fig.3.4); in schimb,
din fig.3.5 se observa ca, atunci cand ponderea rezistentei este mare (b
de valori mari), aceeasi accentuare a anizotropiei conduce la scaderea
unghiului
(Fig.3.4); in schimb,
din fig.3.5 se observa ca, atunci cand ponderea rezistentei este mare (b
de valori mari), aceeasi accentuare a anizotropiei conduce la scaderea
unghiului ![]() si deci la o reducere
a domeniului de functionare stabila a mMS-RV.
si deci la o reducere
a domeniului de functionare stabila a mMS-RV.
In concluzie, pentru a obtine beneficii functionale maxime este necesar ca prin constructie sa se realizeze o anizotropie cat mai accentuata (a < 1, de valori cat mai mici), simultan cu reducerea la minimum a rezistentei statorice de faza (b, respectiv R de valori cat mai mici).
Factorul de putere este un indicator calitativ important pentru caracterizarea functionarii unui motor de curent alternativ. Motoarele sincrone cu reluctanta variabila prezinta un factor de putere scazut deoarece, lipsite de excitatie rotorica, absorb intreaga putere de magnetizare, sub form de putere reactiva, de la sursa de alimentare a infasurarii statorice.
Pentru o analiza simplificata, se va deduce expresia factorului de putere pentru cazul particular al neglijarii rezistentei, R = 0, deci b = 0. Din relatiile (4) se obtin componentele curentului:
|
|
iar factorul de putere se defineste ca raport intre puterea activa absorbita, egala in acest caz cu puterea electromagnetica P = M(w/p), si puterea aparenta S = mUI:
|
|
Pentru valoarea maxima a factorului de putere se obtine relatia:
|
|
Factorul de putere maxim este cu atat mai ridicat cu cat valoarea coeficientului de anizotropie este mai mica, a = (Xq/Xd) << 1, ceea ce semnifica o diferenta cat mai mare intre reactantele sincrone dupa axele d si q rotorice. Astfel, pentru a=0,2 se obtine (cosj)max=0,67 in timp ce pentru a= 0,5 se obtine (cosj)max = 0,33. Rezulta de aici un motiv suplimentar pentru a se realiza, pe cat posibil, masini cu diferenta cat mai mare intre reluctantele dupa cele doua axe. Prin metode constructive de realizare a rotoarelor cu bariere nemagnetice se obtin relativ usor rapoarte a = 0,2 - 0,25 si chiar a = 0,1 ceea ce corespunde unei valori (cosj)max = 0,825.
In figurele urmatoare este prezentate curbele
de variatie ale factorului de putere
cosφ = f(![]() ) pentru a=0,5, b =0; 0,1 si 0,2 si curbele de variatie ale campului sincronizant
) pentru a=0,5, b =0; 0,1 si 0,2 si curbele de variatie ale campului sincronizant ![]() pentru aceleasi valori
ale parametrilor a si b:
pentru aceleasi valori
ale parametrilor a si b:
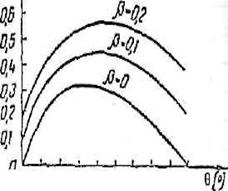
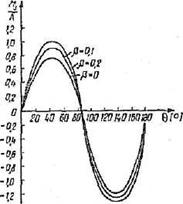
Fig. 3.6 Curbele cosφ = f(![]() ) Fig 3.7 Curbele
) Fig 3.7 Curbele ![]()
Unde b =β
Expresiile gasite pentru cuplul sincronizant dovedesc influenta considerabila a rezistentei statorice asupra caracteristicilor masinii sincrone reactive. Neglijarea in calcule a rezistentei poate duce, in cazul masinilor de mica putere, la erori mari. 0 influenta insemnata asupra caracteristiciior o are raportul dintre reactantele sincrone. In mod curent si fara dificultate, se pot construi servomotoare sincrone la care raportul reactantelor este xq/xd = 0,50,33.
3 Servomotoare sincrone reactive cu rotatie incrementala si bobinaje statorice concentrate. Motoare pas cu pas cu reluctanta variabila :
In aceasta categorie, intra servomotoarele de mica putere pas cu pas, care indeplinesc functia de receptoare in sistemele de cuplaj sincron prin impulsuri. Ele sunt destinate sa transforme impulsuriie electrice in deplasari unghiulare sau liniare discrete, respectiv pasi. Astfel de masini electrice sunt intrebuintate in sistemele de comanda programata a masinilor-unelte, a masinilor de lucru, a instalatiilor industriale etc. Indeplinind functia unor circuite decodificatoare, adica transformand informatia cifrica primita in codul binar, sub forma de impulsuri electrice, in deplasari unghiulare, servomotoarele pas cu pas permit construirea unor sisteme automate de tip discret, care nu mai necesita legaturi de reactie, deoarece se stabileste o corespondenta riguros univoca intre informatia numerica primita si deplasarea unghiulara realizata.
Initial, motorul pas cu pas era constituit dintr-un electromagnet cu armatura mobila combinat cu un mecanism cu roata dintata si clichet. Pentru dispozitivele reversibile, se combina doua sisteme identice. Astfel de dispozitive, desi au o functionare sigura, sunt putin folosite, in prezent putand dezvolta la arbore un cuplu de ordinul catorva sute de gf-cm, dar nu pot functiona la frecvente ale impulsurilor mai mari de 50 Hz.
Servomotoarele pas cu pas moderne realizeaza direct deplasarea unghiulara a arborelui, fara a mai fi necesara prezenta mecanismului cu roata dintata si clichet. Anumite constructii pot dezvolta cupluri de ordinul zecilor de kgf-cm la frecvente ale impulsurilor de pana la 200Hz si cu pasi reprezentand deplasari unghiulare de ordinul gradelor.

Fig. 1. Servomotorul de mica putere pas cu pas.
Se construiesc astfel de servomotoare avand pe stator si pe rotor poli aparenti in numere diferite, dar apropiate ca valoare. Un tip simplu de servomotor pas cu pas cu care se pot realiza deplasari unghiulare de 30° este aratat schematic in Fig. 1..
Statorul are 6 poli pe care sunt asezate bobinajele de excitatie alimentate in curent continuu prin intermediul unui comutator mecanic sau electronic. Rotorul este bipolar si este lipsit de bobinaje de excitatie. Alimentand intr-o anumita ordine bobinajele de excitatie statorice, se modifica succesiv repartitia campului magnetic din masinp si, datorita fortelor electromagnetice, rotorul se deplaseaza, ocupand de fiecare data pozitia pentru care reluctanta circuitului magnetic respectiv este minima.

![]()
![]()
![]() Fig. 2 Aspectul magnetic la servomotorul pas cu
pas.
Fig. 2 Aspectul magnetic la servomotorul pas cu
pas.
Deplasari unghiulare de cate 30° se pot obtine daca alimentarea infasurarilor de excitatie se face in ordinea indicata in tabelul de mai jos. Aici, bobinajele care se alimenteaza s-au notat cu indicii : x-x'; y-y de exempiu, in primul rand, se alimenteaza bobinajele 1 cu 1', in al doilea rand 1 cu 2 si I, cu 2' etc.
Configuratiile campului magnetic pentru primele trei moduri de conectare a bobinajelor de excitatie sunt reprezentate schematic in Fig. 2 a,b,c. Tot aici, sunt aratate si pozitiile respective ale rotorului.
Daca se executa rotorul cu patru poli in loc de doi, pentru acelasi stator si pentru aceeasi ordine de conectare a bobinajelor de excitatie, se mareste precizia de functionare a masinii si se reduce unghiul de deplasare la 15°. In Fig. 3, sunt aratate pozitiile succesive ale rotorului pentru primele moduri de conectare a bobinajelor de excitatie. Se vede ca, in acest caz, rotorul se deplaseaza in sens invers celui al campului magnetic.

Fig.3. Servomotorul pas cu pas cu rotor tetrapolar.
Tab. 1. 1 Ordinea de alimentare a bobinajelor.
|
Bobinajele | ||||||
|
a |
x |
x' | ||||
|
b |
x |
x' |
y |
y' | ||
|
c |
x |
x' | ||||
|
d |
x |
x' |
y |
y' |
||
|
e |
x |
x' |
||||
|
f |
y' |
x |
x' |
y |
||
|
g |
x' |
x | ||||
|
h |
y |
y' |
x |
x' | ||
|
i |
x' |
x | ||||
|
j |
y |
y' |
x |
x' |
||
|
k |
x |
x' |
||||
|
i |
x' |
y |
y' |
x |
||
|
m |
x |
x' |
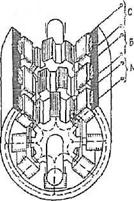
Fig. 4 Servomotorul pas cu pas cu trei statoare
Pentru o buna precizie de functionare si pentru marirea cuplului dezvoltat de servomotoarele pas cu pas, se folosesc constructii cu trei statoare. Constructiv, aceste servomotoare reprezinta combinarea intr-o singura masina a trei servomotoare pas cu pas unite intr-o singura carcasa si avand un singur arbore. Aceasta constructie este aratata in perspectiva in Fig. 4.. Bobinajele de excitatie, distincte pentru cele trei masini, sunt asezate in crestaturile statorului. Rotoarele au aceleasi numere de poli ca si statoarele, dar polii fiecarui rotor sunt deplasati fata de cei ai rotorului precedent cu cate o treime de pas polar. Alimentand pe rand, intr-o anumita ordine A, B, C, bobinajele de excitatie, sistemul rotoric se va deplasa de fiecare data astfel incat rotorul respectiv sa ocupe pozitia pentru care reluctanta circuitului magnetic este minima, unghiul de deplasare fiind egal deci cu o treime de pas polar.
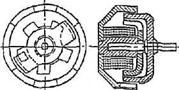
Servomotoarele cu bobinaje statorice concentrate (cu poli aparenti ai statorului) se folosesc ca receptoare in asa-numitele sisteme de transmisie sincrone prin impulsuri, datorita carui fapt aceste masini sunt deseori numite servomotoare de impulsuri (pas cu pas). Drept traductoare sunt folosite in aceste sisteme dispozitive de comutare care permit trimiterea impulsurilor de curent numai prin anumite conductoare ale liniei de legatura, ceea ce imprima rotorului receptorului o anumita pozitie in spatiu. In Fig. 5, este reprezentata schema asa-numitului sistem de transmisie sincrona tetrafiliara. In stanga, este aratat traductorul T (comutatorul), iar in dreapta receptorul (motorul de impulsuri) R.
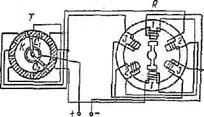
Fig 5 Schema sistemuhii de transmisie tetrafitara.
Numarul lamelelor din fiecare grupa este m/3, unde m este numarul total al lamelelor comutatorului. In cazul din figura, pentru m = 9, fiecare grupa este compusa din trei lamele.
Pe axul din interiorul comutatorului, se poate roti o parghie curbataavand la capete doua contace, C1 si C In timpul rotatiei parghiei, ambele contacte, dispuse sub un unghi de 140°, calca pe suprafata interioara a lamelelor. Parghia mai face contact si pe inelul fix K, la care este legat un pol al sursei de curent continuu. In acest fel, pe timpul rotatiei parghiei, contactele puse sub tensiune cand una, cand doua grupe de lamele. Servomotorul de impulsuri R are in stator sase poli aparenti, pe care sunt dispuse bobinajele. Fiecare doua bobinaje dispuse diametral sunt legate intre ele in serie, in asa fel incat prin alimentarea lor in curent continuu sase formeze doi poli de polaritati opuse. Inceputurile perechilor de bobine se leaga la conductoarele liniei de legatura, iar sfarsiturile la cel de al doilea pol al sursei de curent continuu. Rotorul servomotorului de impulsuri are aici o forma de dublu T, care formeaza doua proeminente. Este evident ca rotorul servomotorului va lua o astfel de pozitie incat permeanta caii fluxului creat de infasurari sa fie maxima, adica axa longitudinala a rotorului sa coincida cu axa polilor respectivi. Diversele pozitii ale rotorului in functie de polaritatea polilor statorului .
Asadar, in timpul rotatiei comutatorului, se produce o rotate in salturi a campului statorului, prin urmare se realizeaza si o rotatie in trepte a rotorului. Deoarece fiecarei treceri a parghiei dintr-o pozitie in alta ii corespunde o rotire a rotorului cu un unghi de 30°, rezulta ca la o rotatie completa a comutatorului vor corespunde 1,5 rotatii ale rotorului. In cazul general, legatura intre vitezele de rotatie ale comutatorului si rotorului este data de ecuatia: n = (m / 6p) · nk in care:
- n - turatia rotorului, in rot/min;
- nk turatia parghiei comutatorului, in rot/min;
- m - numarul lamelelor comutatorului;
- p - numarul perechilor de poli de pe rotorul servomotorului.
In cazul considerat, avem m = 9 si p = 1, prin urmare:
n = (9/6 · 1) · nk =1, 5 nk.
Pentru a intelege intuitiv fenomenul fizic de creare a cuplului in masinile sincrone reactive, in Fig. 6.a este reprezentata pozitia rotorului in cazul in care curentul continuu trece prin bobinajele a doi poli opusi ai statorului. Unghiul de dezacord θ = 0 si rotorul, aflandu-se in pozitie stabila, nu tinde sa se roteasca intr-un sens sau altul, adica cuplul sincronizant static este nul. Daca, fara a se roti comutatorul, se roteste fortat rotorul cu un unghi 9 astfel ca θ < 9 < 90° in sensu! acelor de ceasornic (fig 6.b), apare o deformatie a campului magnetic care va provoca aparitia unui cuplu sincronizant static, care tinde sa roteasca rotorul in sens opus acelor de ceasornic. Este evident ca rotorul se va fixa sub un astfel de unghi θ fara de axa statorului, pentru care cuplul exterior va fi echilibrat de cuplul sincronizant al servomotoruiui.
Rotind rotorul cu ajutorul unei forte exterioare, cu unghi de 90°, liniile de camp vor lua forma din Fig. 6.c si, datorita faptului ca ele nu sunt deformate, cuplul sincronizant static va fi nul, ca si in pozitia initiala, cand θ = 0, adica rotorul se afla in echilibru. Intre pozitiile pentru θ = 0 si θ = 90°, exista insa o deosebire esentiala, care consta in faptul ca in primul caz echilibrul este stabil, deoarece la orice deviere rotorul tinde sa se intoarca in pozitia initiala, pe cand in al doilea caz echilibrul este nestabil; este suficient un impuls cat de mic pentru ca rotorul sa se roteasca si sa treaca in pozitia stabila din Fig. 6.a., sau intr-o pozitie care difera de ea cu 180°. Asadar, trecind de la = 0 la = 90°, cuplul de sincronizare static creste la inceput, atinge un maxim, apoi incepe sa scada din nou pana la zero . Unghiul θM pentru care Mst = MstM depinde de configuratia piesei polare a rotorului si a intrefierului.
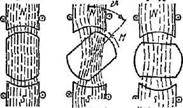
a) b) c)
Fig. 6 Formarea cuplului la motoarele sincrone reactive.
La un servomotor cu impulsuri (pas cu pas), in regim de functionare static, valoarea curentului in bobinajele statorice ale poliior ramane invariabila, intrucat ea nu depinde de unghiul de dezacord G, tensiunea sursei de curent fiind constanta. De unghiul depinde numai valoarea fluxului, deoarece, la rotirea rotorului, reluctanta din drumul acestui flux este o functie de
Valoarea cuplului sincronizant static se poate determina din ecuatia derivatei energiei magnetice Wm considerata a fi concentrata in intrefier, de-a lungul unghiului de dezacord:
Mst =dWm/d
Wm= ![]()
unde:
Wms = ![]()
este energia magnetica specifica;
- dv = l · δr · d θ - unitatea elementului de volum;
-H · δ = F - tensiunea magnetica a intrefierului;
- dΦ = B · l · r · d - elementul de flux din intrefier.
Fluxul magnetic fiind = F · Λ, in care Λ reprezinta permeanta dintre stator si rotor rezulta:
Mst = ![]()
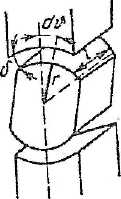
Fig. 7 Determinarea expresiei cuplului sincronizant static.
Pentru a exprima cuplul in gf-cm, se poate folosi relatia:
![]()
Functia Λ( ) este periodica (spatial), cu perioada de 180°. Daca variatia lui Λ are un caracter armonic, ca in Fig. 8, atunci:
![]() =
=![]()
Fig. 8 Curba de variatie a permeantei magnetice.
Marimile Λd (valoarea maxima a lui Λ) si Λq (valoarea minima a lui Λ) se numesc permeante longitudinala, respectiv transversala.
Vom obtine:
Mst = 5000 F2(Λd -Λq )sin 2θ
Prin urmare, in cazul unei variatii armonice a permeantei, cuplul sincronizant maxim apare pentru sin2θ = 1, adica pentru θ = 450:
MstM =5000F2(Λd -Λq )
Din ecuatiile de mai sus se vede ca, la servomotorul pas cu pas, cuplul sincronizant poate sa apara numai daca permeantele longitudinala si transversala nu sunt egale, adica daca exista poli aparenti. Aceasta conditie este obligatorie si pentru servomotorul reactiv cu bobinajul statoric distribuit.
Regimul dinamic de functionare se caracterizeaza printr-o comutare a bobinajelor statorului atat de rapida incat, datorita inertiei, curentul nu reuseste sa atinga valoarea maxima. Se intelege ca prin aceasta se reduce valoarea cuplului sincronizant, deoarece in ecuatie intervine tensiunea magnetomotoare, care este proportionala, cu curentul bobinajului statoric. Rezulta deci ca intotdeauna cuplul sincronizant dinamic al servomotorului este mai mic decat cel static, si anume cu atat mai mic, cu cat este mai mare turatia servomotorului, adica. cu cat este mai mic timpul in care fiecare bobinaj statoric se afla sub tensiune.
Calculul proceselor tranzitorii in cazul analizat, cu conectare la tensiunea continua U dintr-un circuit care contine rezistenta r si inductanta L, foloseste ecuatia diferentiala de ordinul intai:
U = ri + l(di/dt)
din care se obtine ca solutie expresia cunoscuta pentru curent, in cazul inchiderii circuitului;
i = I (1 - e-t/T![]() )
)
unde:
I = U/r este valoarea stabilizata a curentului;
T1 = L/r - constanta de timp a bobinajului.
Daca, in mornentul t0, bobinajul se deconecteaza, reducerea continua a curentului se determina prin expresia:
i = i0e-t/![]() - fiind constanta de timp, tinandu-se seama de rezistenta
nu numai a bobinajului servomotorului,
ci si de intervalul de descarcare al comutatorului.
- fiind constanta de timp, tinandu-se seama de rezistenta
nu numai a bobinajului servomotorului,
ci si de intervalul de descarcare al comutatorului.
Acest proces este prezentat in Fig. 9 Constantele de timp T1 si T2 se determina prin marimile subtangentelor la curbele curentului in punctele t = 0 si t = t0.
Deoarece rezistenta corespunzatoare intervalului de descarcare al comutatorului este foarte mare in comparatie cu rezistenta r a bobinajului servomotorului, constanta de timp T2 este atat de mica, in comparatie cu T1, incat, practic, se poate considera deconectarea bobinajului ca instantanee si se poate determina valoarea medie Im a curentului, numai pentru timpul t0 cand bobinajul se afla sub tensiune. Atunci:
Im
si
Fm = wI = w
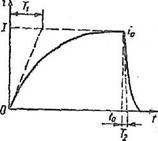
Fig. 9. Determinarea valorii medii a curentului statoric.
Introducand expresia aflata pentru Fm, se obtine cuplul sincronizant dinamic:
Md = 500F![]()
![]()
Prin urmare:
Md = Mst
Intrucat unei turatii a rotorului ii corespund 6p inchideri ale bobinajelor polilor statorici, la k inchideri pe secunda corespund k/6p rot/s, deci:
n = 60k/6p 10 (k/p) rot/min
Daca exista sase poli pe stator, durata fiecarei inchideri este de o sesime din durata unei turatii, sau pentru n rot/min, t0 = (10/n) s; se obtine:
t0 = p /k
Atunci, pe baza ecuatiei, raportul dintre cuplul sincronizant dixiamic si static este:

Raportul marimilor Md / Mst determinate pentru aceasta ecuatie, in functie de turatie, pentru T1 = 0,05;0,1;0,2 s. Se vede ca domeniul practic de folosire al servomotoarelor pas cu pas este intre 0 si 100 150rot/min; se recomanda a se folosi aceste servomotoare in montaje de transmisie ca indicator de unghi, adica in regim static
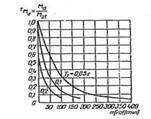
Fig 10 Caracteristicile dinamice relative Md = f9N0 la motoarele cu impulsuri
Puterile servomotoarelor ps cu pas se limiteaza la puterea traductorului comutator. Chiar daca se folosesc condensatoare de stingere a scanteilor conectate intre conductoarele liniei de legatura, aceasta putere nu depaseste 75 80W la intrare, iar puterea utila la arborele servomotorului este mult mai mica, datorita pierderilor relativ mari din bobinaje, cauzate de marirea rezistentei bobinajelor in scopul reducerii constantei de timp. Cuplul sincronizant static al servomotorului nu depaseste 4000 4500gf-cm. Departarea transmisiei prin impulsuri nu depaseste de obicei 200m.
4 Servomotoare sincrone reactive monofazate
Aceste motoare de mica putere nu sunt servomotoare propriu-zise, dar vor fi tratate, deoarece principiul lor de functionare este apropiat de al servomotoarelor si, in anumite cazuri speciale, pot fi utilizate ca atare.
Primul tip de servomotor sincron reactiv pe care il abordam este eel monofazat, care poate fi utilizat in instalatiile de foarte mica putere, unde este necesara antrenarea mecanismelor la viteze unghiulare reduse. Constructia servomotorului sincron reactiv monofazat este reprezentata in Fig. 1. Statorul S, constituit din tole de otel electrotehnic izolate este prevazut cu un bobinaj B concentrat, alimentat de la reteaua monofazata de curent alternativ. Rotorul R, constituit, de asemenea, din tole de otel izolate, are un numar anumit de dinti, depinzand de frecventa tensiunii de alimentare si de viteza unghiulara a rotorului. Tipul constructiv este deschis, de cele mai multe ori fara carcasa.
R S
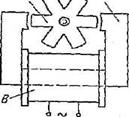
Fig. . Motor sincron reactiv monofazat.
Functionarea servomotoarelor sincrone reactiv monofazate se bazeaza pe utilizarea fortelor care se exercita in campul electromagnetic asupra corpurilor magnetizate. Aplicand la bornele bobinajului de excitatie o tensiune alternativa sinusoidala, bobinajul este parcurs de un curent alternativ care produce un camp magnetic pulsatoriu, ale carei linii se inchid prin intrefier si rotor. Sub actiunea fortelor ce se exercita asupra rotorului, acesta se invarteste astfel incat sa ocupe pozitia pentru care reductanta circuitului magnetic este minima, adica pozitia in care dintii rotorului se afla in fata polilor statorici. Din cauza inertiei, rotorul nu se va opri in aceasta pozitie. Intre timp, fluxul magnetic scade pana la zero si, reducandu-se totodata fortele ce se exercita asupra rotorului, acesta continua sa se invarteasca, astfel ca de polii statorici se apropie dintii urmatori. In cea de a doua semiperioada, se exercita un nou impul care determina apropierea de polii statorici a dintilor celor mai apropiati, astfel incat rotorul continua sa se invarteasca in acelasi sens.
Fortele ce se exercita asupra rotorului sunt, in acest caz, pulsatorii, frecventa pulsatiilor fiind egala cu dublul frecventei tensiunii de alimentare. Din aceasta cauza, functionarea masinii este neuniforma. In afara de aceasta, servomotorul nu poate sa dezvolte un cuplu de pornire suficient, chiar daca rotorul se afla in cea mai favorabila pozitie si de aceea, pornirea trebuie initiata printr-o invartire din exterior.
Viteza unghiulara este, ca si la orice servomotor sincron, proportionala cu frecventa f a tensiunii de alimentare. Dupa cum s-a aratat, in timpul unei semiperioade, rotorul se deplaseaza cu un unghi:
α = ![]()
viteza unghiulara este:
Ω = 2f![]()
de unde rezulta turatia:
n=![]()
Dupa cum se vede, alegand in mod corespunzator numarul ZR de dinti rotorici, se pot obtine viteze unghiulare reduse, inferioare vitezelor ce se pot obtine la servomotoarele sincrone de constructie obisnuita. In mod curent, se construiesc servomotoare sincrone monofazate reactive cu viteze unghiulare reduse (100200rot/min). Din cauza functionarii neuniforme si a oscilatiilor pendulare, aceste masini nu pot fi construite pentru viteze unghiulare mari. Neajunsul cel mare al servomotoarelor sincrone reactive monofazate este cuplul de rotate mic ce-1 pot dezvolta. Puterea utila nu depaseste 0,51,5W.
Se poate obtine o oarecare marire a cuplului de rotatie prin executia dintata a polilor statorici; pasii dentari si latimile dintilor statorici si rotorici sunt aceleasi. In acest caz, fortele de atractie magnetica se exercita asupra mai multor dinti si nu asupra unei singure perechi, ca in cazul anterior. Puterea servomotoarelor de acest tip poate fi astfel marita pana la 10 . 15W.
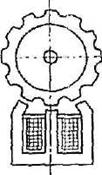
Fig 2 Motor sincron pentru actionarea pompelor
Formele constructive ale servomotoarelor de tipul analizat sunt foarte variate si deseori neasemanatoare, desi principiile de functionare sunt aceleasi. In Fig. 2, este reprezentata constructia servomotorului cu 12 dinti rotorici, care, la frecventa de 50Hz, va determina o turatie a rotorului de n = 500rot/min. Se construiesc motoare asemanatoare capabile sa execute o rotatie intr-un minut sau chiar o rotatie in 24 h si care, de aceea, sunt folosite pentru antrenarea aratatoarelor ceasornicetor.
Un alt motor pentru ceasornice, construit de firma Philips, este aratat in Fig. 3 La acest motor, rotorul numai cu doi dinti este executat din fier moale sau poate fi chiar un magnet permanent, din care cauza functionarea este mai complexa decat a servomotoarelor obisnuite de tipul analizat. Caracteristica principala a acestei masini o constituie dimensiunile mici, diametrul fiind de 2030 mm. In Fig. 4 , este reprezentat un motor cu 77 de dinti rotorici, in care caz turatia este:
n = ![]()
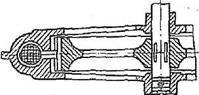
![]() Fig. 3. Motor sincron pentru Fig. 4 Motor sincron pentru electrofoane. ceosornice electrice.
Fig. 3. Motor sincron pentru Fig. 4 Motor sincron pentru electrofoane. ceosornice electrice.
Acest motor este folosit pentru antrenarea discurilor. Avand doua statoare si bobinajele de excitatie putand fi legate in paralel sau in serie, servomotorul poate fi alimentat atat la tensiunea de 110V, cat si la tensiunea de 220V.
5 Servomotoare sincrone reactive reductoare
Acestea rezolva problema construirii servomotoarelor sincrone de turatie mica si cu o functionare lina, fara socuri. Cu acest tip de servomotor, se pot obtine viteze unghiulare oricat de mici, fara a mai fi necesara montarea unui reductor mecanic, desi alimentarea se face de la reteaua de curent alternativ de frecventa industriala.
Constructia motorului reactiv reductor este reprezentata schematic in Fig. 1 . Statorul in forma de inel, din tole de otel electrotehnic izolate este prevazut spre interior, cu crestaturi semicirculare. Pe stator, este dispus un bobinaj multipolar inchis, asemanator bobinajelor in inel. La masinile trifazate, se scot trei prize, decalate la cate 120° intre ele, pentru legarea lor la reteaua de alimentare. La masinile de curent alternativ monofazat, se scot patru prize, alimentarea facandu-se prin intermediul unui condensator, asa cum se arata in Fig. Rotorul in forma de disc este executat tot din tole de otel electrotehnic izolate intre ele si are la partea exterioara crestaturi semicirculare. Numarul crestaturiior rotorice este, in mod obligatoriu diferit de numarul crestaturilor statorului.
Functionarea motorului sincron de mica putere, reactiv, reductor se bazeaza pe aceleasi fenomene fizice ca si functionarea motorului sincron reactiv de constructie normala. Pentru explicarea fenomenelor, se considera motorul aratat in Fig. 1, daca, la un moment dat, campul magnetic invartitor are o astfel de repartitie incat axa lui este orientata dupa directia sagetii A, atunci rotorul va ocupa pozitia in care dintii rotorici 1 si 10 se vor afla in fata dintilor statorici 1 si 9 pentru care reluctanta circuitului magnetic are valoarea minima. Dupa un anumit interval de timp, depinzand de frecventa curentilor statorici si de numarul de poli ai masinii, repartitia campului magnetic invartitor se modifica, astfel incat axa lui este orientata dupa directia sagetii B. Fenomenele se petrec ca si cum campul magnetic s-ar fi rotit cu un unghi egal cu pasul dentar statoric αS = 2/ZS. Numarul dintilor rotorici fiind diferit de cel al dintilor statorici, pentru ca rotorul sa ocupe pozitia de reluctanta minima, acesta nu mai este nevoit sa se roteasca cu acelasi unghi αs, ci cu un unghi mai mic si anume egal cu diferenta pasilor dentari statoric si rotoric:
![]()
In aceasta situatie, pozitia rotorului din Fig. 1 este aceea pentru care in fata dintilor statorici 2 si 10 se afla dintii rotorici 2' si 11'.
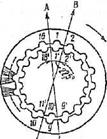
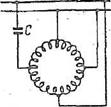
Fig. 1. Motor sincron reactiv Fig. 2 Schema de alimentare
reductor. a unui motor reductor monofazat
Este evident ca, in aceste conditii, raportul dintre turatia de sincronism si turatia rotorului este:
de unde rezulta ca turatia rotorului este:
n=![]()
Se observa ca turatia este cu atat mai mica, cu cat la un numar de dinti statorici Zs, diferenta ZR - Zs este mai mica. Astfel, de exemplu, daca Zs = 396; ZR = 400; 2p = 2 si f = 50 Hz, turatia ce se poate obtine este:
n = 50 ![]() = 0,5
rot/s = 30 rot/min.
= 0,5
rot/s = 30 rot/min.
Turatia minima se obtine in cazul in care numarul dintilor rotorici este cu unul mai mare decat acela al dintilor statorici. In acest caz insa, se vor gasi simultan fata in fata numai cate un dinte statoric si unul rotoric, reluctanta minima a circuitului magnetic va avea o valoare marita si gradul de utilizare a masinii va fi redus. Pentru o buna utilizare a materialelor, trebuie satisfacuta relata:
ZR - Zs = 2pk
in care k este un numar intreg, a carui valoare se alege in functie de turatia ce trebuie realizata.
Micsorarea turatiei poate fi realizata cu un consum redus de materiale daca se executa rotorul in forma de inel cu crestaturi pe ambele suprafete laterale (interioara si exterioara) si daca in interiorul acestuia se dispune un al doilea rotor, de asemenea dintat. Se obtine, in acest mod, o dubla reducere a vitezei, ceea ce permite realizarea cu o singura masina a mai multor turatii, de exemplu de 1rot/min, 1rot/h, si 1rot in 12h, astfel de servomotoare putand fi folosite in ceasornicarie, fara a mai fi necesare reductoare.
In afara de valoarea redusa a turatiei, servomotoarele reactive reductoare se mai caracterizeaza si prin turatia constanta, ceea ce permite utilizarea lor pentru actionarea magnetofoanelor si a altor aparate de inregistrare si redare a sunetelor.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |

 .
.
 .
. .
.