SERVOMOTOARE SINCRONE. CARACTERIZARE GENERALA
1.1 Generalitati:
Caracteristica
principala a masinilor sincrone consta in faptul ca functioneaza
in regim stabilizat cu turatie
riguros constanta daca frecventa tensiunii de alimentare este constanta. Din aceasta cauza,
acolo unde se impune o astfei de constanta, se folosesc servomotoarele sincrone. Micromotoarele sincrone
(mMS),
ca orice motor sincron, se caracterizeaza in principal prin faptul ca, in regim
stationar (de sincronism) intre viteza de rotatie, n si frecventa tensiunii de
alimentare, ![]() exista o dependenta
rigida, de directa proportionalitate, data de relatia:
exista o dependenta
rigida, de directa proportionalitate, data de relatia:
![]() rpm
rpm
unde: p - numrul de perechi de poli ai infasurarii alimentate. in regim de sincronism, viteza rotorului, n este egala cu viteza campului magnetic rotitor (armonica fundamentala), creat de bobinajul statoric alimentat. Viteza rotorului se mentine constanta indiferent de valoarea cuplului de sarcina - variind de la gol la valoarea nominala - si indiferent de perturbatiile de amplitudine a tensiunii de alimentare, atat timp cat aceasta nu scade sub limita de asigurare a stabilitatii in functionare.
Intrucat in domeniul aplicatiilor de mica si micro putere caracteristicile energetice nu joaca un rol decisiv, in construirea mM sincrone se renunta la excitatia electromagnetica cu bobinaj rotoric alimentat in curent continuu; se folosesc pe scara larga mM sincrone excitate cu magneti permanenti sau fara excitatie, (cu reluctanta variabila) care sunt masini fara perii si contacte glisante si prezinta simplificari si avantaje constructiv-functionale in raport cu motoarele sincrone clasice.
Ca orice motor sincron, in mod obisnuit, mMS nu dezvolta cuplu de natura sincrona la pornire, Mp = 0, in conditiile alimentarii cu frecventa de regim nominal, iar cuplul produs in regim de sincronism este limitat conform caracteristicii unghiulare la o valoare maxima, Mmax, a carei depasire de catre cuplul rezistent (Mr > Mmax) conduce la pierderea stabilitatii de functionare si la iesirea din sincronism (decrosare).
Pornirea mM sincrone este solutionata cu ajutorul unui cuplu de natura asincrona, produs fie pe baza unei infasurari in colivie construita pe rotor, fie datorita posibilitatii de stabilire a curen]ilor Foucault indusi in parti conductoare masive ale rotorului. Colivia rotorica are atat rol de pornire, rol de amortizare (de imbunatatire a stabilitatii in functionare) cat si de ecranare a magnetilor permanenti impotriva actiunii demagnetizante a fluxului statoric.
Ca urmare a proprietatilor de mai
sus, mMS
sunt recomandate si se utilizeaza in actionari care necesita ca viteza sa fie
mentinuta riguros constanta, sau direct proportionala cu frecventa de
alimentare-comanda. Prin alimentarea mMS de
la convertoare statice de frecventa-tensiune, domeniul lor de aplicatii s-a
extins si asupra unor actionari in care se realizeaza succesiv mai multe valori
ale vitezei, ajustarea lenta a vitezei prin reglarea frecventei, solutionarea
pornirii prin alimentare cu frecventa redusa, antrenari de mare viteza (6.000 -
30.000 rpm) prin alimentare cu frecventa ridicata (![]() Hz) etc.
Hz) etc.
In cazul unei alimentari discontinue, secventiale a fazelor, prin impulsuri de curent continuu, orice masina sincrona poate deveni un motor pas cu pas la care miscarea se executa prin deplasari discrete, incrementale ( pasi ), iar pozitia rotorului este determinata de numarul de impulsuri de comanda primite.
Servomotoarele sincrone de regula de mica putere, sunt utilizate intr-o gama larga de puteri, de la 1 mW pana la mii de wati si intr-un domeniu larg de turatii, de la 3000 rot/min la 1 rot/luna (bineinteles, avand si reductor de viteza corespunzator).
Servomotoarele sincrone se fabrica intr-o mare varietate de tipuri de executie, insa majoritatea lor se compun dintr-un bobinaj statoric, care produce campul inductor (care se roteste cu viteza de sincronism), si un rotor astfel construit incat sa functioneze cu viteza de sincronism, independent de sarcina. Servomotoarele sincrone sunt utilizate in automatizari, pentru antrenarea cu o viteza unghiulara riguros constanta a unor mecanisme (in instalatii de telefoane si telegrafie automata, dispozitive de memorie, calculatoare electronice etc.) si ca receptoare in unele instalatii de transmisie sincrona.
Factorul principal care determina proprietatile unui sistem oarecare de legatura sincrona este precizia de transmitere a deplasarilor unghiulare, definite prin unghiul de dezacord θ, cand sistemul a ajuns in stare de repaus (eroare statica), sau la viteza de regim permanent (eroare dinamica). In sistemele 'pas cu pas', precizia se caracterizeaza prin unghiul dintre doua pozitii stabile invecinate ale rotorului receptorului.
Parametrii speciali care caracterizeaza functionarea masinilor sincrone folosite in special in sistemele automate sunt:
Cuplul sincronizant static Mst, definit ca acel cuplu pe care iI dezvolta masina la un unghi oarecare, format de axa de simetrie a campului magnetic cu axa rotorica si numit unghiul de dezacord.
Caracteristica care exprima variatia cuplului sincronizant static in functie de unghiul de dezacord:
Mst = f(
este numita caracteristica statica. In functie de tipul
masinii, aceasta curba poate avea diferite forme, insa, in toate
cazurile, ea incepe in punctul θ = 0 (Fig.1.1), atingand, la ![]() o anumita valoare a unghiului de dezacord,
un maxim, care determina momentul static maxim
o anumita valoare a unghiului de dezacord,
un maxim, care determina momentul static maxim ![]() ce caracterizeaza
capacitatea lui de supraincarcare. Pentru dispozitivele de Iegatura sincrona, o importanta mare o are
nu valoarea maxima a cuplului Mst (deoarece unghiul de dezacord este de obicei mic), ci panta de crestere
a cuplului static la unghiuri de dezacord mici:
ce caracterizeaza
capacitatea lui de supraincarcare. Pentru dispozitivele de Iegatura sincrona, o importanta mare o are
nu valoarea maxima a cuplului Mst (deoarece unghiul de dezacord este de obicei mic), ci panta de crestere
a cuplului static la unghiuri de dezacord mici:
Cuplul sincronizant specific Msp este dezvoltat la arborele masinii la un unghi de dezacord θ = 1° sau:
Mst = 
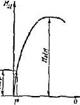
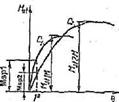
![]() Fig.1.1.Caracteristica cuplului sincronizant Fig.1.2
Caracteristicile cuplului static
Fig.1.1.Caracteristica cuplului sincronizant Fig.1.2
Caracteristicile cuplului static
static M = f(θ) sincronizant pentru doua masini.
Este evident ca dispozitivul care are panta caracteristicii statice mai mare va fi mai eficient. In Fig. 1.2 sunt aratate caracteristicile statice a doua masini C1 si C2,. Este usor de vazut ca prima masina va avea o precizie mai mare decat a doua, deoarece Msp1 > Msp2, desi cuplul static maxim este mai mare la cea de a doua masina.
Deoarece, la unghiuri de dezacord mici, caracteristica statica poate fi confundata cu tangenta dusa la caracteristica in punctul θ = 0, panta de crestere a cuplului sincronizant mai poate fi caracterizata prin marimea:

care este deseori numita impropriu cuplu sincronizant specific.
Pentru dispozitive cu miscarea rotorului pas cu pas, marimi importante mai sunt:
cuplul de stabilitate, adica marimea cuplului sincronizant static la arbore in cazul unui unghi de dezacord de 3 - 5°;
factorul de calitate static,
=Mst/Mf
unde: Mf este cuplul de frecare la arbore, care tinde sa franeze rotorul si sa il opreasca inainte de atingerea pozitiei de concordanta;
cuplul sincronizant dinamic Md, care reprezinta acel moment maxim la arbore pe care il poate dezvolta masina la o anumita turatie si la un anumit unghi de dezacord, fara a iesi din sincronism; curba Md = f(n) pentru θ = const poate fi numita caracteristica dinamica a masinii.
In sisteme cu miscarea rotorului pas cu pas, caracteristica dinamica reprezinta dependenta:
Md = f(k),
pentru θ = const unde: k este numarul de impulsuri in unitatea de timp.
1.2 Clasificarea micromotoarelor sincrone:
Dupa modul de alimentare-comanda si caracterul miscarii realizate, mM sincrone pot fi:
- cu alimentare si miscare continue;
- cu alimentare prin impulsuri si miscare incrementala (mM pas cu pas).
Dupa relatia dintre viteza de rotatie si viteza lor de sincronism, mM sincrone se clasifica in :
-
normale (viteza de rotatie n egala cu viteza de sincronism ![]() );
);
- reductoare (viteza de rotatie un submultiplu al vitezei de sincronism).
In functie de principiul conversiei electromecanice a energiei, mM sincrone cu miscare de rotatie continua se clasifica in:
mM sincrone cu magneti permanenti (de tip activ), mMS-MP;
mM sincrone cu reluctanta variabila (reactive), mMS-RV;
mM sincrone cu histerezis, mMS-H.
Conceptia rotorului si materialul din care acesta este fabricat, sunt factorii care diferentiaza in cea mai mare masura cele trei tipuri de mM sincrone cu miscare continua, determinand natura cuplului electromagnetic si caracteristicile lor de functionare.
Statorul acestor mM este similar masinilor sincrone si asincrone clasice; este constituit dintr-o armatura feromagnetica lamelata care poarta o infasurare mono, bi sau trifazata, de constructie repartizata sau concentrata. Alimentarea infasurarii statorice este corespunzator mono, sau trifazata, astfel incat sa se creeze in intrefier un camp magnetic invartitor care antreneaza rotorul intr-o miscare sincrona.
Micromotoarele pas cu pas constituie o clasa larga si diversificata de mM care se caracterizeaza separat .In principiu, fiecare din tipurile de mM sincrone pot fi construite atat ca masini rotative cat si ca masini liniare, cu miscare de translatie.
Avantajele tuturor acestor mM sincrone fata de masinile sincrone clasice constau in lipsa contactelor alunecatoare, a uzurii ansamblului inele-perii; mentenanta usoara, fiabilitate crescuta, compatibilitate cu mediile inflamabile si explozive, silentiozitate.
Ele pastreaza insa, specific unei masini sincrone, problemele:- de mentinere a stabilitatii, ceea ce impune evitarea regimurilor dinamice rapide (ce pot surveni in cazul reglajului continuu al vitezei prin frecventa) sau cu socuri de cuplu rezistent peste valoarea maxim admisibila, Mmax care ar putea compromite functionarea sincrona (prin decrosare); - de asigurare a unui cuplu de pornire de alta natura decat cea sincrona; - se adauga problema protejarii magnetilor permanenti impotriva reactiei demagnetizante a indusului. Necesita in consecinta, prezenta unei colivii rotorice de pornire-amortizare-(ecranare).
1.3 Ecuatiile de functionare ale mM sincrone cu magneti permanenti si reluctanta variabila:
Se ia in consideratie cazul unui micromotor sincron trifazat, cu magneti permanenti care prezinta anizotropie constructiva dupa axele rotorice de simetrie longitudinala si transversala astfel incat, de-a lungul circumferintei intrefierului, reluctanta este variabila (mMS-MP-RV) si al carui rotor este echipat cu o colivie de pornire-amortizare.
Analiza mMS-MP-RV poate fi facuta pe baza ecuatiilor modelului bifazat ortogonal in sistemul de referinta rotoric dq-qq (m.b.o.r) al masinii sincrone sinusoidale ( ecuatiile Blondel-Park ) sau cu ajutorul fazorilor spatiali reprezentativi (f.s.r.) ; colivia rotorica de pornire-amortizare este inlocuita prin doua infasurari D si Q, echivalente, sinusoidal distribuite, dispuse in cuadratura, pe axele de referinta.
Magnetul
permanent se inlocuieste printr-o infasurare supraconductoare, E de rezistenta
nula, ![]() , plasata pe axa dq,
infasurare in care, indiferent de regimul de functionare, curentul echivalent este constant,
, plasata pe axa dq,
infasurare in care, indiferent de regimul de functionare, curentul echivalent este constant, ![]() .
.
Se stabilesc mai intai ecuatiile de regim dinamic ale m.b.o.r. al mMS. Pentru aceasta, se porneste de la ecuatiile generale ale masinii sincrone cu excitatie electromagnetica , cu marimile rotorice reduse la stator si, prin particularizare se obtine urmatoarea ecuatie matriciala:
|
|
unde p = d/dt, iar pentru axele reperului ortogonal rotoric atasat axelor de simetrie geometrica si magnetica s-a adoptat notatia simplificata d - q.
La ecuatia matriciala (3.1) se adauga ecuatia cuplului electromagnetic instantaneu, m si ecuatia de echilibru dinamic:
|
| |
|
|
unde p este numarul de perechi de poli, J reprezinta momentul de inertie al masinii plus al dispozitivului de sarcina antrenat, raportat la axul masinii, m0 - cuplul de pierderi la mersul in gol, mr - cuplul rezistent la arbore.
![]() Se observa ca in ecuatia matriciala
(3.1), pe coloana E nu exista decat un termen, wLmd
, corespunztor tensiunii induse prin rotatie de catre magnet in infasurarea
statorica echivalenta de pe axa q; termenii corespunzatori tensiunilor induse
prin eventuala variatie a curentului de excitatie sunt nuli, deoarece IE este
constant si deci derivata sa este nula,
Se observa ca in ecuatia matriciala
(3.1), pe coloana E nu exista decat un termen, wLmd
, corespunztor tensiunii induse prin rotatie de catre magnet in infasurarea
statorica echivalenta de pe axa q; termenii corespunzatori tensiunilor induse
prin eventuala variatie a curentului de excitatie sunt nuli, deoarece IE este
constant si deci derivata sa este nula,
![]()
Componentele ortogonale ale fluxurilor totale sunt date de relatia matriciala:
|
|
|
Relatiile (3.1), (3.2), (3.3) si (3.4) constituie ecuatiile generale in marimi transformate-ortogonale, cu marimile rotorice reduse la stator, ale micromotoarelor sincrone cu magneti permanenti si reluctanta variabila, care se pot scrie si in forma:
|
|
Prin integrarea sistemului format din aceste ecuatii se pot afla marimile de functionare care intereseaza pentru orice regim de lucru al mM.
1.4 Ecuatiile mMS-MP-RV in regim sincron de functionare :
In regim sincron, regimul stationar
de functionare al mMS-MP-RV, viteza de rotatie este constanta n = n1 = const., (![]() =
= ![]() = const.). Pentru
obtinerea ecuatiilor de regim sincron, se vor particulariza ecuatiile generale
(3.1) - (3.4) sau (3.5) ale m.b.o.r. al micromotorului sincron.
= const.). Pentru
obtinerea ecuatiilor de regim sincron, se vor particulariza ecuatiile generale
(3.1) - (3.4) sau (3.5) ale m.b.o.r. al micromotorului sincron.
Se observa ca in regim sincron,
atunci cand viteza rotorului masinii este egala cu cea a campului invartitor,
curentii indusi in colivia de amortizare sunt nuli, iD = iQ = 0. De asemenea,
componentele ortogonale ale curentilor, id, iq si tensiunilor ud, uq sunt
marimi constante, care nu depind de timp, ![]() si
si ![]() , motiv pentru care se vor nota in continuare cu majuscula:
Id, Iq, Ud, Uq.
, motiv pentru care se vor nota in continuare cu majuscula:
Id, Iq, Ud, Uq.
Particularizand ecuatiile generale (3.1) pentru regimul sincron de functionare si considerand ca in circuitul statoric echilibrat se realizeaza sisteme simetrice de marimi, astfel incat componentele homopolare sunt toate nule, se obtine:
|
|
unde Xd
= wLd
(sau Xd = Xad + Xs w(Lmd +
Ls)),
respectiv Xq = wLq (sau Xq = Xaq + Xs w(Lmq
+ Ls))
sunt reactantele sincrone
longitudinala respectiv transversala, iar Xmd = wLmd
este reactanta de magnetizare dupa axa d; cu E0 = w![]() se noteaza valoarea maxima a tensiunii contraelectromotoare
(t.c.e.m.) induse de fluxul de excitatie,
se noteaza valoarea maxima a tensiunii contraelectromotoare
(t.c.e.m.) induse de fluxul de excitatie, ![]() = LmdIE al magnetului
permanent, in infasurarea de faza statorica, la mersul in gol.
= LmdIE al magnetului
permanent, in infasurarea de faza statorica, la mersul in gol.
Corespunzator regimului stationar se obtin urmatoarele ecuatii algebrice ale tensiunilor:
|
|
si fluxurilor:
|
|
precum si expresia cuplului electromagnetic mediu exprimat cu ajutorul componentelor ortogonale (marimi transformate):
|
|
unde m = 3 este numarul de faze statorice.
Ecuatiilor (3.7) ale componentelor ortogonale ale tensiunii in regim stationar (de sincronism) le corespunde ecuatia de tensiuni scrisa cu ajutorul fazorilor spatiali reprezentativi de forma:
|
|
sau
|
|
si diagrama fazoriala aferenta, prezentata in figura 2.1, in care se precizeaza urmatoarele unghiuri orientate:
d0
- unghiul de sarcina (sau unghi intern) al mM
sincron, masurat de la f.s.r. al t.c.e.m. ![]() la f.s.r. tensiunea
aplicat,
la f.s.r. tensiunea
aplicat, ![]() , astfel incat pentru
func]ionarea in regim de motor, d0 > 0;
, astfel incat pentru
func]ionarea in regim de motor, d0 > 0;
e
- unghiul de pozitie al f.s.r. curent statoric, ![]() masurat de la axa d,
origine a reperului ortogonal rotoric d-q, astfel incat la functionarea in
regim de motor e I p
masurat de la axa d,
origine a reperului ortogonal rotoric d-q, astfel incat la functionarea in
regim de motor e I p
y e este unghiul masurat de la fazorul ![]() la
la ![]() , astfel incat pentru yI p
curentul
, astfel incat pentru yI p
curentul ![]() are caracter
magnetizant, iar pentru yI p
curentul este demagnetizant;
are caracter
magnetizant, iar pentru yI p
curentul este demagnetizant;
j
- unghiul pe baza caruia se defineste factorul de putere, reprezentand
defazajul masurat de la curentul ![]() la tensiunea
la tensiunea ![]() si n functie de semnul
caruia mM constituie un receptor inductiv (j
> 0) sau capacitiv (j < 0), in raport cu sursa de alimentare sinusoidala.
si n functie de semnul
caruia mM constituie un receptor inductiv (j
> 0) sau capacitiv (j < 0), in raport cu sursa de alimentare sinusoidala.
Expresia (3.9) a cuplului electromagnetic mediu, in regim stationar poate fi dedusa imediat pornind de la bilantul energetic in masina sincrona trifazata, conform caruia puterea electromagnetica, P aferenta unei faze se poate scrie ca diferenta intre puterea electrica activa absorbita de la retea si pierderile electrocalorice prin efect Joule-Lenz; pentru m faze, conform diagramei din figura 2.1 se obtine:
|
|
Pentru componetele ortogonale ale
curentului si tensiunii, care corespund proiectiilor fazorilor ![]() si
si ![]() pe axele d-q ale
diagramei din figura 2.1, rezulta relatiile:
pe axele d-q ale
diagramei din figura 2.1, rezulta relatiile:
|
|
respectiv:
|
|
unde I si U sunt valori efective, a curentului, respectiv a tensiunii.
In continuare se urmareste a se stabili caracteristica unghiulara a mM sincron, reprezentand dependenta cuplului electromagnetic in functie de unghiul de sarcina, M(d0), cu luarea in consideratie a valorii nenule a rezistentei statorice de faza, R 0. La masinile de micro si mica putere, ponderea pe care rezistenta infasurarii statorice o are in raport cu reactanta sa inductiva este insemnata si influenta rezistentei asupra caracteristicilor de functionare nu mai poate fi neglijata, ca in cazul masinilor sincrone de medie si mare putere.
Se introduc expresiile (3.14) ale componentelor ortogonale ale tensiunii in sistemul de ecuatii (3.7) si se deduc expresiile componentelor ortogonale de curent:
|
|
cu care, din relatia (3.9) se obtine expresia valorii medii a cuplului electromagnetic de forma:
|
|
Pentru a creste gradul de generalitate, in analiza influentei pe care parametrii constructivi (Xd, Xq, R) cat si gradul de excitatie o au asupra performantelor mM sincron se introduc urmatoarele marimi adimensionale:
|
- coeficientul de anizotropie magnetica dupa axele rotorice d si q: - coeficientul (ponderea) rezistentei statorice in raport cu reactanta sincrona longitudinala: - gradul de excitare al motorului: |
a = Xq/Xd; b = R/Xd; e = E0/U. |
Folosind acesti coeficienti se obtin expresiile curentilor transformati de forma:
|
|
si de asemeni, relatia cuplului electromagnetic :
|
|
Din dezvoltarea expresiei (3.19) rezulta ca, atunci cand se ia in consideratie rezistenta infasurarii statorice, cuplul electromagnetic este determinat de suma a trei componente:
|
M = Mex + Mrel + Mex-rel , |
dupa cum urmeaza:
1) un cuplu electromagnetic Mex care este datorat exclusiv excitatiei produse de magnetul permanent si care este nenul atunci cand e
|
|
2) un cuplu electromagnetic Mrel datorat anizotropiei circuitului magnetic, numit cuplu reactiv (sau de reluctanta), care este nenul daca a
|
|
3) un cuplu electromagnetic Mex-rel, datorat atat anizotropiei circuitului magnetic cat si excitatiei produse de magnetul permanent si care este diferit de zero atunci cand atat e 0 cat si a
|
|
Expresia general (3.19) a cuplului electromagnetic se particularizeaza si se analizeaza pentru fiecare tip de mM sincron in parte: mM sincron reactiv (e = 0, a < 1), sau mM sincron excitat cu magneti permanenti, e 0, avand fie circuit magnetic izotrop, a = 1, fie cu anizotropie 'normala' (clasica), a < 1, fie cu anizotropie 'inversa', a > 1.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |