
Raport de
Grant: Promovarea aplicatiilor de vedere artificiala
Proiectul si-a propus, pentru intreaga lui derulare, urmatoarele obiective globale
Sa implice membrii colectivului si studentii de la doctorat, master si studii aprofundate si din anii terminali, intr-o activitate de identificare de posibile aplicatii de vedere artificiala pentru firmele din diverse domenii de activitate din regiunea Oltenia,
Folosirea experientei si finantarii de la firmele cu care colectivul are relatii de colaborare pentru atingerea obiectivelor proiectului,
Proiectarea unor solutii concrete pentru aceste aplicatii pe baza integrarii componentelor hard si soft existente pe piata si prin adaugarea de programe aplicative care sa materializeze ingeniozitatea si experienta membrilor echipei de cercetare,
Elaborarea unui raport stiintific care sa fie pus la dispozitia posibililor beneficiari si care sa includa aplicatiile si solutiile propuse,
Identificarea unor beneficiari dispusi sa accepte implementarea practica a unor aplicatii de acest tip,
Implementarea practica a unei aplicatii pilot pe baza echipamentelor si programelor achizitionate din fondurile proiectului pentru a demonstra practic fezabilitatea solutiei,
Valorificarea rezultatelor prin publicarea de articole la manifestari stiintifice, elaborarea de rapoarte care sa fie puse la dispozitia potentialilor beneficiari, imbunatatirea tematicilor de curs si laborator prin includerea rezultatelor cercetarii, incheierea de contracte directe cu beneficiarii depistati in timpul derularii contractului,
Participarea la programele europene de colaborare in domeniul cercetarii aplicative,
Integrarea colectivului in cadrul activitatilor departamentului de achizitie, prelucrare si recunoastere de imagini din cadrul Parcului Tehnologic Universitar IT pe care Universitatea din Craiova il va dezvolta in viitorul apropiat.
Pentru anul 2003, faza unica "APLICATII DE VEDERE ARTIFICIALA", obiectivul global asumat a fost identificarea si implementarea de solutii particulare pentru aplicatii de vedere artificiala, in special la nivel de algoritmi si programe.
Actiunile prevazute si realizate au fost urmatoarele:
Documentare la nivelul bibliotecilor de catedra, departament, facultate si universitate.
Efectuarea de vizite de documentare si schimb de experienta la universitatile de prestigiu din tara.
Utilizarea relatiilor de cooperare stiintifica pe care colectivul de cercetare le are cu colective din Europa si Statele Unite pentru documentare si schimb de experienta.
Utilizarea internetului pentru o documentare extinsa, detaliata si actuala.
Documentarea la nivel regional prin deplasarea efectiva pe teren, la sediul firmelor, pentru identificarea aplicatiilor care se preteaza la introducerea sistemelor de vedere artificiala.
Utilizarea informatiilor de la firmele cu care exista relatii de colaborare directa (SMC Romania, IPA CIFAT, SERV EMFI) si cautarea potentialilor beneficiari ai aplicatiilor de vedere artificiala printre beneficiarii lor.
Proiectarea unui numar de arhitecturi de sisteme de vedere artificiala, care sa acopere cat mai multe din aplicatiile identificate.
Publicarea rezultatelor obtinute la manifestari stiintifice.
Desi finantarea aprobata, in acest prim an, pentru realizarea proiectului a fost mult mai mica decat aceea apreciata ca necesara si ca urmare solicitata, colectivul implicat s-a preocupat cu maxima seriozitate de indeplinirea obiectivelor propuse si, cu sprijinul firmelor partenere, a realizat, in anul 2003, urmatoarele:
A reusit o implicare deosebita a tinerilor, studenti de la doctorat, master si studii aprofundate si din anii terminali, intr-o activitate de identificare de posibile aplicatii de vedere artificiala pentru firmele din diverse domenii de activitate din regiunea Oltenia. Astfel 20 de studenti din anul V de la Facultatea de Automatica, Calculatoare si Electronica, Specializarea Automatica, Optiune Robotica si 15 studenti de la master de la Facultatea de Automatica, Calculatoare si Electronica, Specializarea Calculatoare in limba engleza, au realizat tot atatea proiecte care au avut ca finalitate identificarea unor potentiale aplictii de vedere artificiala, analiza si/sau proiectarea structurii de echipamente si programe, implementarea unor componente ale respectivelor structurii. S-a insistat si pe formarea unor deprineri de promovare, in concordanta cu tematica grantului, a rezultatelor obtinute. Fiecare tanar implicat a facut o prezentare publica, utilizand tehnici specifice multimedia, a aplicatiei proprii de vedere artificiala. Este de asteptat, ca dupa absolvire, tinerii specialisti sa valorifice practic experienta acumulata in cadrul acestei activitati de cercetare in care au fost implicti.
Avand in vedere, pe de o parte, structura activitatilor propuse, si, pe de alta parte, dinamica concreta a finantarii grantului, se poate concluziona ca derularea contractului nu ar fi fost posibila fara sprijinul logistic si suportul conexiunilor in intreprinderile din teritoriu oferite de firmele partenere in proiect: SMC Romania, IPA CIFAT, SERV EMFI Sustinerea s-a facut prin suportarea deplasarilor de documentare si promovare a rezultatelor, oferirea de facilitati de comunicatii si editare / multiplicare / tiparire, materiale consumabile, componente, echipamente de laborator specifice, participarea specialistilor din aceste firme la realizarea obiectivelor proiectului. S-au facut deplasari la intreprinderile selectate de parteneri unde s-au realizat analize concrete ale proceselor in care exista posibilitatea implementarii de aplicatii de vedere artificiala.
S-a desfasurat o intensa activitate de documentare folosind surse diverse: facilitatile prestigioasei organizatii stiintifice internationale IEEE, inclusiv accesul la biblioteca digitala care ofera o deosebita sursa bibliografica formata din articole stiintifice cu continut integral, biblioteca de catedra care a fost dezvoltata de-a lungul anilor inclusiv cu carti din domeniul vederii artificiale, dar si in anul 2003 folosind alte fonduri decat cele ale prezentului contract, bibliotecile facultatii si universitatii din Craiova sau al altor universitati de prestigiu din tara si strainatate, internet.
Rezultatele obtinute au fost publicate si prezentate la manifestari stiintifice de prestigiu:
Dorian Cojocaru, "Landmarks Based Vision System for Mobile Robots", The 14th International Conference on Control Systems, and Computer Science CSCS14, 2-5 July, 2003, Bucharest, Romania - lucrarea prezinta o aplicatie de ghidare a unui robot mobil pe baza informatiilor oferite de un sistem de vedere artificiala, prin urmare este direct legata de obiectivele proiectului,
Dorian Cojocaru, "Cad And Computer Vision Based
Application", IFAC Workshop Intelligent Assembly and Disassembly IAD'03, 9 - 11
October, 2003,
Dan Marghitu, Dorian Cojocaru, s.a., "Contact Pressure Of Quadrupedal Animals", Proceedings of DETC'03, ASME 2003 Design Engineering Teghnical Conferences and Computers and Information in Engineering Conference, DETC2003/VIB-48427, 2-6 Septembrie, 2003, Chicago, Illinois, USA - lucrarea reprezinta o continuare a unei colaborari pentru aplicatii in care s-au aplicat si tehnici de vedere artificiala.
Dorian Cojocaru, Claudiu Milosi, "A Mechatronics Application", SINTES 11 International Symposium on
Systems Theory, Robotics, Computers & Process Informatics, October 2003,
Directorul de grant a elaborat, dupa o activitate de lunga durata, monografia "Achizitia, prelucrarea si recunoasterea imaginilor", aparuta la Editura Universitaria, Craiova, ISBN 973-8043-146-6. Lucrarea are 340 pagini si include un capitol special dedicat aplicatiilor de vedere artificiala, adica exact tematica grantului in discutie. Initial, cartea a fost inclusa in planul editorial pe anul 2002, dar a fost finalizata in 2003.
Aplicatiile bazate pe vedere artificiala analizate se grupeaza pe categorii dupa cum urmeaza:
Sisteme de vedere robotice clasice:
Aplicatii de inspectie industriala
Inspectia produselor alimentare
Conducerea robotilor industriali
Aplicatii diverse
Colectivul care a lucrat la acest contract de cercetare s-a implicat puternic in organizarea manifestarii stiintifice, de traditie si prestigiu recunoscut, SINTES 11. International Symposium on Systems Theory, Robotics, Computers & Process Informatics, Craiova, octombrie 2003. Doua dintre firmele partenere in acest contract, SMC Romania si IPA CIFAT, au fost atrase si s-au numarat printre sponzorii si organizatorii directi ai simpozionului SINTES 11.
Activitatea dedicata realizarii obiectivelor acestui contract de cercetare s-a materializat si prin materiale didactice utile pentru cursul si aplicatiile de la cursurile Recunoasterea formelor - Automatica, optiunea Robotica, anul V, Prelucrarea numerica a imaginilor - Electronica, anul V, Prelucrarea imaginilor numerice - Calculatoare in limba engleza, master.
Experienta acumulata pe parcursul derularii acestui contract s-a constituit intr-o baza utila pentru a crea premizele participarii colectivului la contracte de cercetare internationala. Astfel, directorul acestui grant impreuna cu o parte dintre membrii colectivului fac parte dintr-un consortiu international prestigios (14 parteneri, dintre care remarcam Norvegian University of Science and Technology - Norway, University of Girona - Spain, University of Southampton - United Kingdom, Heriot Watt University - United Kingdom, Hellenic Center for Marine Research - Greece, NR-ISSIA-SEZ di Genova Robotlab - Italy, European Commission Joint Research Centre - Belgium, Centre National de la Recherche Scientifique Paris - France, University Hannover - Germany, Instituto Superior Tecnico Lisbom - Portugal, CYBERNETIX Marseille - France) care a finalizat si a propus pentru finantare, in cadrul programului FP6, o propunere de contract de cercetare , pe 4 ani, cu o tema din domeniul robotilor mobili subacvatici FREESUB II. Participarea colectivului de la Catedra de Mecatronica, Facultatea de Automatica, Calculatoare si Electronica se va materializa in tehnici si metode de vedere artificiala pentru ghidarea subacvatica.
In cadrul eforturilor de concepere si implementare a proiectului Parcului Universitar IT Craiova, membrii colectivului care au lucrat la acest contract de cercetare s-au implicat foarte activ. Una din contributiile aduse s-a mterializat prin semnarea de protocoale de cercetare pe termen lung (4 ani), in cooperare universitate - firme IT, cu partenerii implicati in acest contract de cercetare: SMC Romania si IPA CIFAT. Printre domeniile de colaborare in cercetare prevazute in aceste protocoale se numara si proiectarea, dezvoltarea, implementarea si promovarea aplicatiilor de vedere artificiala.
Dintre aplicatiile de vedere proiectate si dezvoltate in cadrul acestui contract, amintim trei
Aplicatie bazata pe tehnici de vederea artificiala si proiectarea asistata de calculator,
Aceasta aplicatie isi propune, pentru inceput, sa obtina suprafete curbate tridimensionale prin asamblarea unor suprafete bidimensionale. Proiectarea parametrizata a suprafetelor bidimensionale este realizata de un program dezvoltat in AutoLISP sub AutoCAD. In continuare, se doreste aranjarea optima, din punct de vedere al ariei folosite, pentru suprafetele bidimensionale proiectate la primul pas pe placi metalice de forme predefinite. Urmatorul pas presupune taierea controlata a formelor bidimensionale. Din cauza unor influente perturbatoare inerente formele obtinute practic dupa taiere difera de formele proiectate initial. Controlul erorilor, indicarea posibilitatilor de remediere si supravegherea acestor operatii se face cu tehnici de vedere artificiala. Tot pe baza imaginilor de rezolutii diferite, ierarhizate din acest punct de vedere, se face si recunoasterea automata a formelor bidimensionale pentru asamblarea lor automata.
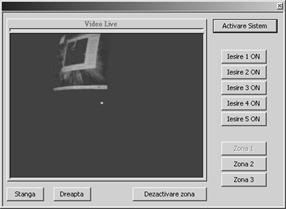
Aplicatie de supraveghere bazata pe vedere artificiala si comunicatie fara fir - aplicatie mecatronica,
A doua aplicatie are ca obiect proiectarea si implementarea unei aplicatii mecatronice. O camera de supraveghere este orientata cu un mecanism spatial 3D. Miscarea este realizata cu un motor pas cu pas care lucreaza sub comanda unui microcontroler. Un modul de recunoastere de voce decodifica comenzile vocale date de operator si le trimite microcontrolerului. Un program care lucreaza pe un calculator personal detecteaza miscarea din scena supravegheata folosind imaginile achizitionate. Un canal de comunicatie fara fir, pentru imagini si mesaje, a fost implementat folosind un telefon celular conectat la calculator. Functia de baza a sistemului este supravegherea la distanta.
Aplicatie cu roboti mobili bazata pe ghidare spatiala prin tehnici de vedere artificiala.
A treia aplicatie este o aplicatie de control a unui robot mobil. Programul care se executa pe calculatorul central este capabil sa localizeze robotul in spatiu, sa comunice printr-un canal fara fir, cu robotul si, respectiv, sa calculeze si sa controleze traiectoria robotului. Sistemul se bazeaza pe informatiile oferite de un sistem de vedere artificiala care include o camera de luat vederi montata pe robotul mobil. Marcaje colorate prestabilite sunt plasate pe traiectoria dorita pentru robot. Recunoasterea marcajelor se face folosind histogramele culorilor, iar pe baza acestor rezultate se trimit comenzile adecvate catre robot pentru a-i controla traiectoria.
Pentru anul 2004, faza unica "IMPLEMENTAREA SI PROMOVAREA APLICATIILOR DE VEDERE ARTIFICIALA", obiectivele asumate au fost:
diseminarea rezultatelor stiintifice obtinute, specifice domeniului,
analiza si sinteza impactului acestor rezultate la nivelul firmelor potential beneficiare,
selectarea unor aplicatii reprezentative,
implementarea practica a aplicatiilor selectate si diseminarea rezultatelor proiectului.
Actiunile realizate, pentru atingerea acestor obiective, au fost:
S-a imbunatatit baza de documentare la nivelul bibliotecii de catedra, pentru domeniul abordat, prin accesul la colectiile revistelor:
IEEE Transaction on Pattern Analysis and Machine Intelligence,
IEEE Transaction on Robotics,
la sursele de informare on-line
IEEE Computer Society Online Books,
IEEE Computer Society Library,
si la cartile de specialitate
Kerre, E. E., Nachtegael, M., "Fuzzy Techniques in Image Processing", Springer Verlag, ISBN 3-7908-1304-4, 2000,
Krishnapuram, R., "Handbook of Fuzzy Computation - Computer Vision", IOP Publishing, ISBN 0-7503-0427-8, 1998.
S-au utilizat relatiile de cooperare stiintifica pe care colectivul de cercetare le are cu colective din Comunitatea Europeana si din Statele Unite pentru documentare si schimb de experienta.
S-au efectuat de vizite de documentare si schimb de experienta la universitati de prestigiu:
Universitatea Tehnica Ceha din Praga, Cehia,
Rensselear Polytechinc Institute, SUA,
The City College of New York, SUA,
Columbia University, New York, SUA,
Georgetown University, Washington, SUA,
OR2020 Workshop: Operating Room of the Future, SUA,
Auburn University, Alabama, SUA.
Colectivul acestui grant este implicat intr-un proiect european de cooperare stiintifica FREESUB, in cadrul programului Marie-Curie Research Training Networks, Call Identifier: FP6-2004-Mobility-1, la care contributia colectivului romanesc este legata de vederea artificiala.
S-a utilizat internetul pentru o documentare extinsa, detaliata si actuala.
S-a realizat documentarea la nivel regional prin deplasarea efectiva pe teren, la sediul firmelor, pentru identificarea aplicatiilor care se preteaza la introducerea sistemelor de vedere artificiala.
S-au utilizat informatiile de la firmele cu care exista relatii de colaborare directa (SMC Romania, IPA CIFAT, SERV EMFI) pentru identificarea aplicatiilor si cautarea potentialilor beneficiari ai aplicatiilor de vedere artificiala printre beneficiarii lor.
Pentru implementarea aplicatiilor
S-au selectat aplicatiile pilot,
S-a proiectat arhitectura de echipamente si a procedurilor software,
S-au achizitionat echipamentele si programele necesare,
S-au testat sistemele rezultate.
Remarcam achizitia si utilizarea unui sistem de vedere artificiala de inalta performanta care va fi foarte util pentru activitatea de cercetare si didactica la nivelul colectivului:
Variable Scan Monochrome Frame Grabber pentru magistrala PCI cu urmatoarele caracteristici: Format video: RS-170, RS-330 (60 Hz) sau CCIR (50 Hz); intretesut sau/si ne-intretesut / scanare progresiva, scanare lenta; selectabile prin program; Format timing: Standard, ne-standard (scanare variabila), asincrona sau aleasa de utilizator; selectabile prin program; Intrari: 3 intrari video complex monocrome multiplexate; Semnal Video: 1 Vvv, 75 ohms; Rezolutie spatiala: Programabila, pana la 2048 pixeli/linie cu pana la 2048 linii/cadru; LUT: doua, 1024 x 8-bit fiecare; Regiune de interese: Programabila, fereastra care defineste zona care sa fie transferata in memorie; Scalare: Setarea ceasului de esantionare prin program; Intrari externe trigerabile: nivele TTL, selectabila prin program; Intrari de sincronizare si control: VSYNC si HSYNC, nivele TTL; ceas pixeli, nivele LVDS/TTL; semnale furnizate de camera placii; Iesiri de sincronizare si control: VSYNC si HSYNC, nivele TTLs; semnale furnzate camerei, placa actioneaza ca master pentru sincronizare; Iesiri expunere / reset: nivele TTL, latimi tacte selectabile prin program; Intrari / Iesiri numerice: iesiri TTL de uz general, intrari TTL de uz general, Iesiri de tip strob: nivele TTL, cu polaritate selectabila prin program, Afisarea in timp real nedestructiva cu animatie suprapusa in timp real; Transfer video: tipic 40 Mbytes/sec, maxim 133 Mbytes/sec;
Pachet de programe care permite dezvoltarea rapida de aplicatii stiintifice sau de uz general pentru prelucrarea si recunoasterea de imagini cu urmatoarele caracteristici: Adaugarea rapida de functii pentru achizitia, prelucrarea si analiza imaginilor; Suporta Direct Show; Compatibilitate cu camere FireWire si USB si cu placa frame grabber de la punctul 1; Dezvoltarea aplicatiilor prin metode grafice de tip Point / Click Script Tool
S-au elaborat, publicat si prezentat articole la manifestari stiintifice nationale:
Au fost publicate articole stiintifice, la conferinte nationale si internationale, reviste de specialitate, dintre care selectam pe cele prezentate si publicatea in Proceedings of the 2nd International Conference on Robotics, ROBOTICA 2004, Timisoara, 14-16 Octombrie, 2004, ISBN 973-97258-3-X
- "Remote System For Mobile Robots", Dorian Cojocaru, Gabriel Terejanu,
- "Melting Point Detection by Computer Vision", Dorian Cojocaru, Cristian Georgescu, Sorin Mateescu,
Fuzzy Techniques in Computer Vision", Razvan Tudor Tanasie, Dorian Cojocaru.
S-au elaborat proiecte de diploma cu teme din domeniul contractului, sub conducerea membrilor echipei de cercetare:
Tehnici si echipamente de prelucrarea imaginii. Aplicatii, Caragea Cristian,
Editarea neliniara a imaginilor, Cristian Rosca,
Monitorizarea si controlul la distanta, prin Internet, ale unui robot mobil, Gabriel Terejeanu,
Prelucrarea si recunoasterea imaginilor aeriene, Catalin Remus Filip,
Senzori pentru manipulari robotice, Daniel Costea,
Sistem de detectie a punctului de topire pe baza informatiilor din imagini, Mateescu Sorin, Cristian Georgescu,
Sisteme senzoriale pentru roboti mobili. Aplicatii la robotul mobil Rug Warrior, Stefan Niculescu,
Fuzzy Techniques in Computer Vision, Tanasie Razvan Tudor.
Studentul Gabriel Terejanu, membru in echipa de cercetare, absolvent in anul 2004 al sectei de Automatica, optiunea Robotica, a obtinut premiul I pe tara, la concursul de proiecte de diploma, oferit de SRAIT - Societatea Romana de Automatica si Informatica Tehnica, pentru lucrarea 'Monitorizarea si Controlul Sistemelor Mecatronice la Distanta', indrumator Prof. Dr. Ing. Dorian Cojocaru, directorul grantului.
S-au elaborat si/sau perfectionat materiale didactice (note de curs, platforme de laborator) pentru disciplinele:
Sisteme de vedere artificiala, anul V, Informatica Industriala,
Recunoasterea formelor, anul V, Automatica (Robotica),
Prelucrarea numerica a imaginilor, anul V, Electronica,
Prelucrar ea imaginilor, master, Inginerie Software.
S-a reusit integrarea efectiva, stiintific, aplicativ si financiar, in cadrul proiectului Parcului Tehnologic Universitar IT a unui departament de specialitate. Directorul acestui grant ocupand pozitia de responsabil IT la nivelul implementarii parcului.
S-a elaborat un raport stiintific cu rezultatele obtinute si s-a distribuit potentialilor beneficiari.
A fost organizat un workshop pentru diseminarea rezultatelor la care au participant, timp de 3 zile, in perioada 15-18.09.2004, zeci de reprezentanti ai firmelor din regiune.
La activitatea aplicativa si de cercetare au participat 6 doctoranzi, 4 studenti la master.
Unul dintre studentii implicati in proiect a terminat studiile si a fost admis la doctorat cu o tema care include aplicatii de vedere artificiala.
Fondurile au fost utilizate corespunzator cerintelor realizarii obiectivelor formulate si aprobate de catre executant, respectandu-se procedurile de achizitie prin licitatie si celelalte norme, normative si legi aflate in vigoare.
Derularea proiectului a fost sustinuta de catre firmele cu care exista relatii de colaborare directa (SMC Romania, IPA CIFAT, SERV EMFI). Sustinerea s-a facut prin suportarea deplasarilor de documentare si promovare a rezultatelor, oferirea de facilitati de comunicatii si editare / multiplicare / tiparire, materiale consumabile, componente, echipamente de laborator specifice, participarea specialistilor din aceste firme la realizarea obiectivelor proiectului.
Dintre aplicatiile implementate exemplificam mai jos
Determinarea puntului de topire folosind informatiile din imaginile numerice.
Acest tip de analiza este frecvent utilizat in laboratoarele de chimie. Punctul de topire este o masura pentru puritatea substantei cristaline analizate. Pentru aceasta aplicatie s-a folosit un sistem cu urmatoarea structura:
un microscop de precizie atasat la o camera de incalzire a substantei,
camera de luat vederi, CCD, cu nivele de gri,
un monitor de supraveghere,
un termometru numeric, cu compensarea jonctiunii reci si care utilizeaza un senzor bazat pe un termocuplu de tip k,
un variator de tensiune pentru ajustarea temperaturii dein camera de incalzire,
un calculator de tip PC,
o placa de achizitie si prelucrare de imagini,
o biblioteca de functii pentru prelucrarea de imagini,
un program specializat pentru aceasta aplicatie.
Metoda utilizata pentru determinarea punctului de topire se bazeaza pe faptul ca nivelele de gri din imagine nu se schimba sau se schimba foarte putin paana in momentil in care substanta ajunge in apropierea punctului de topire. Cand substanta atinge acest punct schimbarile nivelelor de gri din imagine devin importante, deci depasesc un anumit prag. Ca urmare algoritmul utilizat este, in principiu, bazat pe detectia variatiilor importante care apar intre doua cadre succesive ale imaginii.
Monitorizarea si controlul la distanta, prin Internet, ale unui robot mobil
Sistemul de program realizat in cadrul acestei aplicatii utilizeaza tehnologia web pentru a implementa un site web care sa permita controlul la distanta al unui robot mobil dotat cu un sistem de vedere artificiala. Dezvoltarea acestei aplicatii este primul pas pentru implementarea unui laborator virtual pentru aplicatii robotice.
Robotul utilizat este de tip Cye si este complet controlat utilizand o interfata implementata in Visual Basic pe un calculator personal. Comunicatia dintre calculator si robot este de tip fara fir, printr-un canal radio in banda 902-928 MHz. Robotul dispune de un controler bazat pe procesorul de 16 biti Intel 80C196 care lucraza la 16 MHz. Miscarea rotilor robotului se face cu ajutorul a doua servomotoare si a unui reductor 38,3:1. Robotul se alimenteaza de la un acumulator de 12Vcc si are doua tipuri de senzori: un senzor de miscare de tip unghiular incremental si unul pentru detectia coliziunilor de tip senzor de curent.
Sistemul de vedere are urmatoarele componente:
o camera analogica XC10A,

un receptor audio/video 2.4GHz
VR31A,
un convertor Video - USB.
Arhitectura sistemul de programe este prezentata in figura urmatoare
Pentru a lega eficient interfata
utilizator cu datele, in proiectarea orientata pe obiecte, s-a utilizat metoda
MVC Model-View-Controller.
Principalele componente care au fost implementate in acest sistem sunt:
baza de date,
servletul central,
conexiunea dintre aplicatie si robotul mobil,
interfata utilizator,
interfata administrator,
comunicatia servlet - applet,
executivul pentru instructiunile robotului,
programul specializat de analiza a imaginii pentru detectia miscarii,
programul specializat pentru detectia marcajelor (landmarks).
Sistem de programe pentru implementarea tehnicilor fuzzy pentru prelucrarea imaginilor
In aplicatiile practice de vedere artificiala pot apare probleme legate de conditiile de lucru vagi sau ambigue, pe de o parte, sau, pe de alta parte, de rezolvarea simultana a unor sarcini concurente. O modalitate de rezolvarea a acestor probleme este legata de utilizarea tehnicilor fuzzy. Au fost studiati, analizati, adaptati si implementati diversi algoritmi fuzzy pentru prelucrarea imaginilor.
Algoritmi fuzzy pentru imbunatatirea calitatii imaginii
Algoritmul utilizat presupune inlocuirea fiecarui nivel de gri din imagine cu o valoare noua care depinde de informatia locala din imagine. Daca aceasta informatie locala este relativ uniforma atunci noua valoare de gri a pixelului poate fi o valoare medie a nivelelor de gri a unei vecinatati a pixelului respectiv. Alternativ, daca vecinatatea anlizata contine o muchie sau este afectata de zgomot atunci este nevoie de o alta modalitate de a calcula noua valoare de gri. S-a creat o baza de date cu filtrele dintre care se poate alege cel mai util intr-o situatie data. Alegerea, spre deosebire de alegerea uzulala (crisp), nu conduce tot la selectia unui singur filtru, ci, dupa logica fuzzy, fiecare filtru va fi aplicat intra-o anumita proportie. Aceasta selectie constituie clauzele antecedente pentru regulile fuzzy, iar valorile corespunzatoare asociate filtrelor constituie clauzele consecvente pentru regulile fuzzy. Algoritmul este bazat pe paradigma if-then-else referita aici ca FIRE (Fuzzy Inference Ruled by Else-action).
Algoritmi fuzzy de detectie a muchiilor
Algoritmul dezvoltat si implementat este relativ imun la zgomot si se bazeaza tot pe paradigma FIRE. Pentru a detecta o muchie intr-o imagine cu nivele de gri se utilizeaza diferentele de nivele de gri, in vecinatati de dimensiune 3 x 3, ca intrari pentru regulile fuzzy.
Fie X pixelul central al unei vecinatati 3 x 3, atunci:
xi=I(X)-I(Xi), for i = 1..8
In aceasta eciatie I(X) reprezinta nivelul de gri in pixelul X, iar I(Xi) reprezinta nivelul de gri in cel de al i lea pixel din vecinatate. Variabilele xi sunt utilizate drept clauzele antecedente pentru regulile fuzzy. Fie ci gradul global de satisfactie a cele de a i a reguli fuzzy de tip "then". Daca Ni este numarul de variabile de intrare pentru regula a i a, Aij este functia de apartenenta corespunzatoare etichetei lincvistice Aij si atunci se foloseste un operator de mediere pentru agregare:
Fie cT gradul global de satisfactie a primei dintre cele M reguli "if" (sistemul are M reguli "if" si o regula "else") si cE=cM+1 gradul de satisfac'ie al regulei "else" unde:
![]()
![]()
Iesirea z se obtine adunand efectele induse de actiunile "then" si "else" printr-o defuzificare corespunzatoare.
Aplicatia a fost dezvoltata in mediul Microsoft Visual C++ din pachetul Microsoft Visual Studio .NET.
Pentru aprecierea rezultatelor, a fost proiectat si implementat un indice de calitate pentru imaginile cu nivele de gri.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |