Maniabilitatea automobilelor
Maniabilitatea automobilelor reprezinta proprietatea acestora de a mentine directia de mers rectiliniu si de a urma traiectoria imprimata la virare.
Pentru a comanda miscarile dorite pentru automobil conducatorul acestuia actioneaza asupra sistemului de directie, asupra sistemului de propulsie si asupra sistemului de franare prin comenzi specifice.
Maniabilitatea impreuna cu stabilitatea au mare importanta pentru securitatea circulatiei rutiere a automobilului, ele depinzand de caracteristicile sale constructive, de caracteristicile caii de rulare precum si de caracterisiticile regimului de deplasare.
![]()
1. Maniabilitatea in viraj
Pentru inceput se analizeaza cazul virarii automobilului cu puntea motoare in spate; avand planurile rotilor directoare inclinate cu acelasi unghi θ fata de planul longitudinal al autovehiculului (fig. 1.).
Forta de tractiune dezvoltata la rotile motoare din spate devine o forta de impingere Ft la rotile directoare, forta care este paralela cu planul longitudinal al autovehiculului si care are componentele:
Fx = F · cos si Fy = F sin (1.)
unde este unghiul de bracare a rotilor directoare in viraj.
Componentei Fx, care produce rularea rotii, i se opune rezistenta la rulare Rrf iar componentei Fy, care tinde sa provoace alunecarea transversala (deraparea) a rotii, i se opune aderenta transversala Yf. Rularea rotii este conditionata de relatia:
Fx = F · cos ≥ Rrf = f · Zf (2.)
![]() YF
YF
![]()
 FY
FY
![]()
![]()
![]()
![]()
![]()
![]()

![]() Ft Ft
Ft Ft
![]()
![]()
![]() θ
θ
 Fx
Fx
![]()
Rr
![]()
![]()
Yf
![]()
![]()

![]() Fy
Fy
![]()
![]()
![]()
![]()
![]()

![]() Ft Ft
Ft Ft
![]()
![]() θ θ
θ θ
![]() Fx
Fx
![]()
Rr
θ
![]()
Fig.1. Schema virarii automobilului cu puntea motoare spate
iar asigurarea directiei de mers, de relatia:
Fy = F · sin ≤ Yf = · Zf (3.)
Eliminand forta F intre relatiile 2. si 3. se determina conditia de maniabilitate a automobilelor cu tractiunea pe rotile din spate, in viraj:
F =Zf . ![]() (4.)
(4.)
respectiv:
![]() (5.)
(5.)
Aducand inecuatia 5. la o forma mai simpla se obtine:
f · tg , (6.)
in care: este unghiul de virare mediu al rotilor directoare; f - coeficientul de rezistenta la rulare iar - coeficientul de aderenta transversala.
Tinand seama ca unghiurile maxime de viraj sunt mai mici de 450
(tg max < 1) iar caile de rulare uscate si dure au coeficientul de aderenta foarte mare in comparatie cu valoarea coeficientului de rezistenta la rulare, rezulta ca, in asemenea situatii, conditia de maniabilitate in viraj este totdeauna satisfacuta.
In cazul autovehiculelor cu tractiune pe rotile din fata, fig.2., forta de tractiune nu mai este situata in plane paralele cu planul longitudinal al automobilului, ci va actiona in planul rotilor deci:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 F
F
![]()
Rr
![]()

![]()
![]()
![]()
![]()
![]()
![]() θe
θe
![]() F
F
![]()
Rr
θi
![]()
Fig.2. Schema virarii automobilului cu puntea motoare fata
Fx = F iar Fy = 0. (7.)
De aici rezulta superioritatea automobilelor cu tractiune in fata, din punctul de vedere al maniabilitatii in viraj, deoarece intreaga lor forta de tractiune F "impinge" automobilul pe directia de virare
In cazul cailor de rulare cu coeficient de aderenta redus, conditia de maniabilitate poate sa nu fie indeplinita - mai ales pentru valori mari ale unghiului mediu de virare θ. In aceste conditii, automobilul se va deplasa in linie dreapta - pe directia fortei de impingere F - cu toate ca rotile de directie sunt virate cu unghiul θ.
La franarea rotilor de directie o parte din valoarea aderentei va fi consumata pentru invingerea fortei de franare Ff = Xf, continuta in planul median al rotii. In cazul blocarii rotilor de directie prin franare intrega forta de aderenta este consumata de forta de franare:
Ff max = · Zf, (8.)
ceea ce are drept consecinta anularea maniabilitatii automobilului; acesta se va deplasa pe directia fortei de impingere, cu rotile de directie alunecand, cu toate ca sunt virate.
![]()
![]() L
L
![]()
 Re
Re
 A D
A D
![]()
![]()
![]()
![]() b B
b B
 B C
B C
![]()
![]()

![]()
![]()
θ 2
![]()
![]()
 R
R
θ
![]()
![]() Ri
Ri
θ 1
![]()
O
Fig.3.Schema virarii corecte a automobilului
Virajul unui automobil este considerat corect daca rotile directoare ruleaza fara alunecari laterale. Pentru aceasta este necesar ca toate rotile automobilului sa descrie cercuri concentrice in jurul unui singur punct, numit centru efectiv de viraj (punctul O din fig.3.). In cazul automobilelor cu 4 roti centrul efectiv de viraj este situat la intersectia dintre axa puntii spate si axele rotilor directoare. Pentru aceasta trebuie ca roata de directie interioara virajului sa fie rotita cu un unghi de bracare mai mare decat unghiul de rotire a rotii exterioare virajului (θ1> θ 2).
Conditia de virare corecta, adica de inscriere in viraj a automobilului, fara ca rotile de directie sa derapeze lateral, se obtine din analiza triunghiurilor OAD si OBC, din care pot fi determinate urmatoarele relatii:
![]() si
si ![]() (9.)
(9.)
Facand diferenta celor doua egalitati se obtine expresia:
![]() (10.)
(10.)
in care L reprezinta ampatamentul automobilului si b distanta dintre pivotii rotilor directoare.
Mecanismul de directie clasic, cu paralelogram deformabil, nu respecta permanent legea virarii corecte data de relatia 10.. La unghiuri reduse de bracare a rotilor directoare ( cazul razelor mari de viraj) dependenta reala dintre unghiurile de bracare θ1, θ2 este apropiata de cea teoretica, dar, la unghiuri de inclinare mai mari (raze de viraj mici) diferentele dintre cele doua dependente devin mai mari si, in acest caz, automobilul se inscrie in viraj cu o oarecare alunecare a rotilor directoare.. datorita elasticitatii laterale a pneurilor centrul efectiv de viraj al automobilului se deplaseaza, de obicei, inainte, determinand o reducere a alunecarilor laterale.
Din triunghiurile OAD si OBC, fig.3. se pot scrie relatiile de calcul pentru raza exterioara Re, respectiv, pentru raza interioara Ri.:
![]() ;
; ![]() (11.)
(11.)
Din relatiile 6.3.11. se observa ca marirea unghiurilor de viraj ale rotilor de directie conduce la micsorarea razelor de viraj. De aceea, la unele automobile, pentru a mari maniabilitatea, se recurge la folosirea rotilor directoare la ambele punti, ceea ce permite reducerea la jumatate a razei de viraj, pentru acelasi unghi de inclinare θ a rotilor.
Din cele prezentate privind stabilitatea si maniabilitatea automobilului nu s-a tinut seama de elasticitatea transversala a pneurilor, care influenteaza traiectoria reala, deoarece, prin deformarea laterala a pneului, poate apare o abatere de la directia initiala de deplasare.
Daca asupra automobilului actioneaza o forta de deviere laterala Fy , fig.4, determinata de forta centrifuga, de vantul lateral, sau de inclinarea transversala accentuata a caii de rulare, datorita elasticitatii laterale a pneului roata deviaza de la directia initiala de deplasare cu un unghi δ, care este denumit unghi de deviere laterala sau unghi de deriva. Marimea acestui unghi depinde de marimea fortelor care actioneaza asupra rotii de directie, de elasticitatea pneului, de marimea presiunii interioare a aerului din pneu. Valorile maxime ale unghiului de deriva se afla in intervalul δ = 12-180, dupa care poate apare deraparea automobilului.
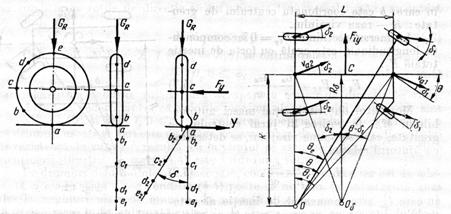
Fig.4. Influenta unghiului de deviere laterala δ asupra maniabilitatii
Influenta elasticitatii transversale a pneurilor asupra maniabilitatii automobilului in viraj este prezentata in figura 4.
Componenta Fiy a fortei centrifuge, la deplasarea in viraj, determina aparitia unghiurilor de deriva δ1 la rotile puntii fata, respectiv δ2 la rotile puntii spate, care influenteaza traiectoria miscarii in raport cu traiectoria comandata de conducatorul automobilului.. Ca urmare a elasticitatii laterale a pneurilor centrul instantaneu de virare se deplaseaza din punctul O in punctul Oδ, aflat la intersectia perpendicularelor pe vectorii vitezelor rotilor fata, Va1 si din spate, Va2.
Distanta dintre centrul instantaneu al virajului si axa longitudinala de simetrie a automobilului se numeste raza traiectoriei miscarii in curba si se noteaza cu Rδ..
Daca δ1 = δ2 raza de viraj a automobilului este aceeasi ca si in cazul in care acesta ar avea roti rigide (R = Rδ).In acest caz se spune ca automobilul are virare normala sau neutra.
Daca δ1 > δ2 razele de viraj nu mai sunt egale (Rδ > R) iar automobilul are capacitatea de viraj insuficienta sau este subvirator. In acest caz, la deplasarea automobilului in viraj, pe curba de raza R, rotirea volanului trebuie sa se faca cu un unghi mai mare decat se face la virarea neutra.
Daca δ1 < δ2 razele de viraj nu mai sunt egale (Rδ < R) iar automobilul are capacitatea de viraj excesiva sau este supravirator, deoarece pentru deplasarea pe curba de raza R, volanul trebuie rotit la un unghi mai mic decat in cazul virarii neutre.
In concluzie se poate arata ca raza de viraj si maniabilitatea automobilului in viraj depind de legatura dintre unghiurile de deviere laterala de la rotile puntilor fata si spate, fig.5.rezultand urmatoarele variante:
-virare neutra sau virare normala, fig.5.a- δ1 = δ2;
-virare insuficienta sau subvirare, fig.5.b- δ1 > δ2;
b c a SUPRAVIRARE NEUTRU SUBVIRARE
![]()
![]()
![]()
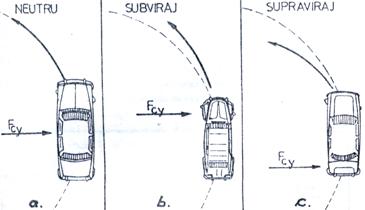
-virare in
exces sau supravirare, fig.5.c- δ1
< δ2.
Fig.5. Cazurile de virare a automobilului
La deplasarea rectilinie a automobilului, cand rotile de directie nu sunt virate si sunt paralele cu directia de inaintare, la aparitia unor forte de deviere laterala, apare tendinta ca automobilul sa devieze de la directia rectilinie si sa inceapa sa vireze, fara comanda primita de la conducator. In acest caz conducatorul trebuie sa intervina si sa roteasca de volan, intr-un sens sau altul, pana la aducerea automobilului pe directia dorita de deplasare.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
