
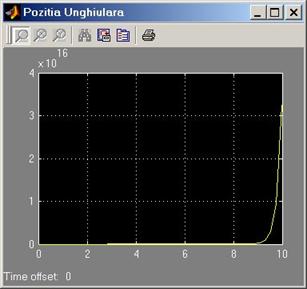
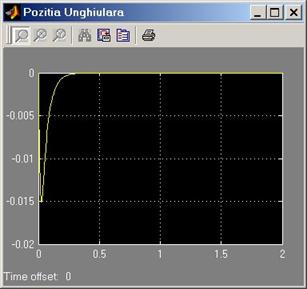
Control in spatiul starilor
Modelul matematic liniarizat in spatiul starilor :
Expresia numerica :
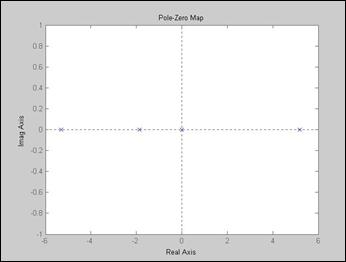
eig(A) =
0, 5.1819, -1.8572, -5.3017
![]() ;
; ![]()
 ; r=rank(Cm)=4.
; r=rank(Cm)=4.
 ;
;  ; r=rank(Om)=4.
; r=rank(Om)=4.
Legea
de reglare prin reactie pe stare ![]() este un produs matriceal dintre matricea de castig K
si vectorul de stare al sistemului.
este un produs matriceal dintre matricea de castig K
si vectorul de stare al sistemului.
Sinteza legii de reglare dupa stare se poate efectua in doua moduri :
Clasic prin alocare de poli : se specifica locatiile dorite ale celor N poli ai sistemului in bucla inchisa si se calculeaza ponderile matricei (vectorului) K printr-o procedura clasica gen procedura Ackerman.
Modern prin minimizarea unui indice de perfomanta impus : se specifica indicele de perfomanta ce trebuie minimizat si se calculeaza matricea (vectorul) K printr-o procedura moderna de control optimal gen lqr care calculeza ponderile optimale ale legii de reglare K.
Pentru ![]() se cere gasirea
matricei de reactie dupa stare
se cere gasirea
matricei de reactie dupa stare ![]() care sa
minimizeze criteriul de performanta impus
care sa
minimizeze criteriul de performanta impus  , unde
, unde ![]() si
si ![]() - matrici simetrice
continuue si in plus
- matrici simetrice
continuue si in plus ![]() pentru
pentru ![]() - intervalul de
conducere. Matricile Q si R se ajusteaza triall-and-error pe proces.Comanda care minimizeaza indicele
de performanta impus este
- intervalul de
conducere. Matricile Q si R se ajusteaza triall-and-error pe proces.Comanda care minimizeaza indicele
de performanta impus este ![]() , unde P este
solutia EMAR
, unde P este
solutia EMAR ![]() .Un caz interesant in aplicatii apare atunci cand vom
alege
.Un caz interesant in aplicatii apare atunci cand vom
alege![]() T
T  . problema urmaririi optimale a traiectoriei xr
s-a transformat in acest caz in problema urmaririi optimale a
referintei yr.)
. problema urmaririi optimale a traiectoriei xr
s-a transformat in acest caz in problema urmaririi optimale a
referintei yr.)
 , si R= z
, si R= z
 |
![]() ;
; ![]()


![]()
![]()

![]() T
T ![]() T
T
![]() T
T ![]() ,
,
![]()
 T
T ![]() T
T![]() T
T T
T ![]() .
.
 |
![]() .
.
L se determina prin alocare de poli in functie de polii sistemului in bucla inchisa.
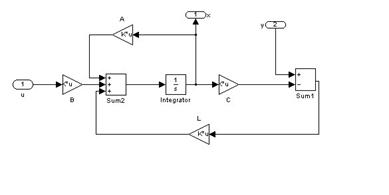
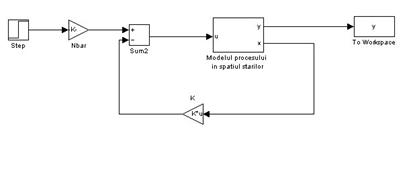
Schemele de control
Componenta Nbar pentru
scalarea referintei :
![]()
![]() si
si ![]() T
T ![]()
![]() .
.
K =[9.4100 8.9925 39.7666 7.7339]; Nbar = -9.4100;
x=50,y=10, z=7, K=[ 2.6726 5.6843 31.5156 6.1013 ] , Nbar = -2.6726;
![]() T
T ![]() ;
;![]() =3 rad/sec T
=3 rad/sec T![]()
![]() T
T ![]() T Ts 100ms.Pentru simulari am ales Ts 20ms.
T Ts 100ms.Pentru simulari am ales Ts 20ms.
Modelul matematic al procesului in timp discret
![]() , cu
, cu ![]() ,
, 
![]()
Translatarea performantelor din timp continuu in timp discret
clp=![]() T
T![]() T clpd = [ 0.0461j 0.9051 0.8872]
T clpd = [ 0.0461j 0.9051 0.8872]
Kc =[9.4100 8.9743 39.7666 7.7339] T Ts T Kd=[8.1959 8.1528 36.8133 7.1571]
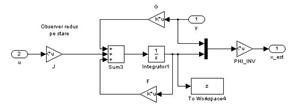
Discretizarea
observerelor de stare :
 Control optimal in timp discret
Control optimal in timp discret
Se
da ![]() .Se cere
.Se cere![]() care sa minimizeze indicele de performanta
impus
care sa minimizeze indicele de performanta
impus ![]() , unde N - dimensiunea
intervalului de conducere,
, unde N - dimensiunea
intervalului de conducere, ![]() si
si ![]() - matrici simetrice
pozitiv definite ce se ajusteaza triall-and-error
pe proces.
- matrici simetrice
pozitiv definite ce se ajusteaza triall-and-error
pe proces. ![]() ,
, ![]() .
.
6. Regulator de "swing-up"
Perioada
de oscilatie a unui pendul gravitational 
Pentru
a aduce pendulul din pozitia sa naturala in pozitia sa de
echilibru instabil trebuie sa ii
crestem energia cinetica .Pentru un pendul de lungime l energia sa cinetica este ![]() . O metoda de a
face acest lucru este sa aplicam o forta cartului proportionala
cu viteza unghiulara de tipul
. O metoda de a
face acest lucru este sa aplicam o forta cartului proportionala
cu viteza unghiulara de tipul
![]()
u = Forta aplicata cartului (N)
k = Factor de amplificare
w =![]() = Viteza unghiulara (rad/sec)
= Viteza unghiulara (rad/sec)
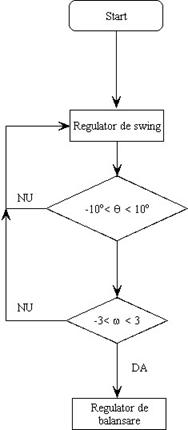
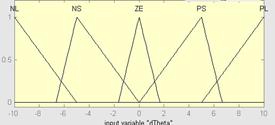
7. Logica fuzzy
|
Angular Velocity dq/dt |
Angle (q |
|||||
|
NL |
NS |
ZE |
PS |
PL |
||
|
NL |
NL |
NL |
NL |
NS |
ZE |
|
|
NS |
NL |
NS |
NS |
ZE |
PS |
|
|
ZE |
NL |
NS |
ZE |
PS |
PL |
|
|
PS |
NS |
ZE |
PS |
PS |
PL |
|
|
PL |
ZE |
PS |
PL |
PL |
PL |
|
PID Fuzzy
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |