
Ca o solutie de a rezolva problema conservarii performantelor sistemelor de reglare in cazul aplicatiilor de timp real, in prezenta perturbatiilor si a neliniaritatilor, a aparut ideea proiectarii unei comenzi multimodel.
In comparatie cu sistemele de reglare clasice, in cazul sistemelor multimodel trebuie rezolvate cateva aspecte suplimentare specifice, si anume:
Ca sfera de aplicare, sistemele multimodel sunt implementate in doua mari categorii, dupa cum urmeaza:
Clasa sistemelor cu o caracteristica neliniara, care nu pot fi controlate folosind un singur algoritm de reglare, fiind si cazul sistemului studiat de fata.
Clasa sistemelor cu regimuri diferite de funtionare, acolo unde diferitele regimuri de functionare nu permit folosirea unui singur algoritm de reglare, sau necesita implementarea unui algoritm de o complexitate ridicata, care este deosebit de anevoioasa.
In literatura de specialitate se pot gasi diverse structuri propuse pentru arhitectura unui astfel de algoritm, depinzand de problema pe care acesta va trebui sa o rezolve, si mai ales de praticularitatile sistemului pe care va fi implementat.
Vom prezenta in cele ce urmeaza o structura mai generala, folosita si pentru rezolvarea cazului nostru:
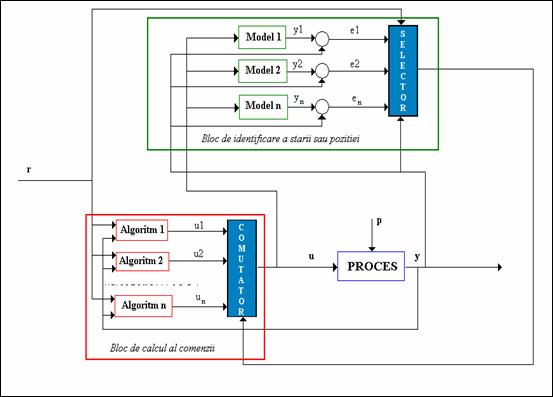
Figura 1 Structura unui sistem multimodel
Pentru schema din figura 1, semnificatia blocurilor este:
Marimile utilizate:
y - iesirea procesului;
y1 . yn - iesirea modelelor;
r - referinta;
u - comanda aplicata de catre Blocul de calcul al comenzii;
p - perturbatiile prezente asupra procesului.
Proiectarea comenzii pentru un sistem multimodel urmeaza aceiasi pasi ca la proiectarea comenzii la sistemele clasice, cu singura deosebire ca, pe langa pasii obisnuiti se mai adauga pasii carecteristici acestui tip de sistem. Ordinea lor este urmatoarea:
Studiul procesului
Incadrarea sistemului in clasa corespunzatoare
Identificarea modelelor
Proiectarea algoritmilor de reglare corespunzatori
Proiectarea selectorului
Proiectarea comutatorului
Implementarea propri - zisa.
Primul pas reprezinta studierea procesului fizic. Principiul cel mai des folosit la acest pas este cunoscut sub numele de " Imparte si controleaza" . Astfel, daca regimurile sunt mai simple si mai bine definite, identificarea modelelor corespunzatoare va fi mai putin anevoiasa, iar reglarea va fi mai performanta.
La pasul al doilea se decide daca sistemul studiat se incadreaza intr-una din clasele mai sus definite pentru care este necesara adoptarea unei solutii multimodel. In functie de aceasta incadrare , modelele regimurilor pot fi mai mult sau mai putin complexe. Pentru a exemplifica, in cazul sistemelor cu regimuri diferite de functionare, trebuie ca modelele acestora sa fie prezente in strucntura multimodel, in timp ce in cazul sistemelor cu o caracteristica neliniara aceasta conditie nu este obligatorie.
Urmatorii doi pasi au fost prezentati pe larg in aceasta lucrare, singura mentiune ce trebuie facuta fiind aceea ca metodele folosite trebuie sa fie cele adecvate in functie de structura proceselor respectiv modelelor identificate.
Pasul cinci implica proiectarea blocului de selectie pentru a asigura o alegere cat mai precisa a modelelor pe intreg domeniul procesului, chiar si in prezenta perturbatiilor.
Pasul sase este unul deosebit de important pentru buna functionare a instalatiei. El presupune proiectarea unui comutator care sa permita trecerea de la o comanda la alta fara ca acest proces sa se realizeze cu socuri. In caz contrar, efectele asupra instalatiei pot fi extrem de daunatoare.
Ultimul pas reprezinta inglobarea tuturo elementelor de mai sus intr-un ansamblu bine interconectat, care sa asigure o functionare optima, si de asemenea sa respecte conditiile impuse a priori.
Trebuie mentionat inca de la inceput ca si in acest caz, procedura difera in functie de clasa in care este incadrat sistemul. Astfel, pentru sistemele cu regimuri diferite de functionare, modelele sistemelor se modifica semnificativ in prezenta factorilor externi si a perturbatiilor, necesitand ca fiecare model sa fie asociat regimului de functionare corespunzator. In general aceste modele sunt complet diferite, neputandu-se realiza o caracteristica unica de functionare. Din aceasta cauza, modele trebuie sa fie incluse in structura sistemului multimodel. In acest caz, numarul de modele este egal cu nuamrul de regimuri distincte de functionare a procesului.
Aceasta abordare poate fi aplicata si in cazul sistemelor din cea de-a doua categorie, insa aceastea mai suporta o abordare, mai adecvata pentru solutionarea problemei. Aceasta abordare consta in modelarea pe portiuni a unei caracteristici neliniare, astfel incat fiecare portiune sa poata aproxima o caracteristica liniara. Aici, numarul de modele va fi egal cu numarul de segmente in care a fost impartita carcteristica sistemului. Acest principiu este ilustrat in figura in care este prezentata caracteristica sistemului studiat in lucrarea de fata:
Figura 2 Caractristica intrare - iesire a procesului
Se pot observa patru segmente, care aproximeaza curba pe domeniul respectiv printr-un model liniar. Alegerea segmentelor trebuie facuta astfel incat eroarea maxima intre caracteristica reala si cea liniarizata sa nu depaseasca o anumita valoare fixata, ε. Aceast alegere poate fi observata in figura urmatoare:
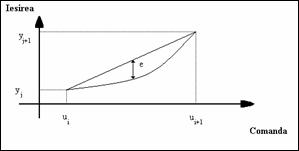
Segmentele nu trebuie neaparat aproximate cu modele de ordinul I, singura conditie ce trebuie respectata este ce legata de diferenta dintre caracteristica reala si model.
Selectorul modelelor are rolul de a specifica cat mai exact pozitia sistemului studiat in cazul schimbarii referintei si aprezentei perturbatiilor. Au fost dezvoltate mai multe metode de proiectare a acestui bloc, in functie de structura sistemului in cauza.
Metoda cea mai utilizata se bazeaza pe calculul erorilor de model, si ulterior al unor criterii de performanta ce deriva din acestea.
Pentru un anumit model Mi, eroarea, notata cu εi, se defineste ca fiind diferenta dintre iesirea procesului real, y(k) si iesirea modelului respectiv, yi(k) , ca in formula:
![]()
Pe baza acestei erori se poate construi un criteriu de performanta pentru fiecare model. Expresia acestuia este :
![]()
unde α>0 si β>0 sunt factori de ponderare aplicati valorilor instantanee si respectiv, celor cumulate, iar λ>0 este factorul de limitare a componentei integrale a criteriului.
Se construiesc astfel N criterii de performanta, cate unul pentru fiecare model existent. Criteriile vor fi evaluate simultan, cel mai bun model fiind acela care are criteriul de performanta crorespunzator cu valoarea minima.
Coeficientii mai sus enumerati pot genera comportamente diferite, astfel incat se pot defini urmatoarele scheme de alegere a acestora:
Se poate observa ca aceasta metoda este potrivita sistemelor cu regimuri diferite de functionare, insa ea se poate aplica cu rezultate la fel de bune si la cele cu o caracteristica neliniara.
Inconvenientele acestei metode se refera la necesitatea unei puteri de calcul sporite. Aceasta se datoreaza faptului ca raspunsul modelelor si criteriile de performanta sunt evaluate in mod continuu.
In cazul sistemelor cu o caracteristica neliniara mai exista o alternativa care consta in simplificarea schemei selectorului precum si a blocului de indetificare a pozitiei sistemului.
Se cunoaste ca punctul de functionare este practic generat de o schimbare a referintei, de obicei de catre operatorul uman. In consecinta, nu mai este necesar sa calculam noul punct de functionare pe baza modelelor procesului, ci doar sa stabilim in vecinatatea carui punct, sau mai exact in domeniul carui model se incadreaza noua valoare a referintei. Odata stabilit acest model se selecteaza in mod natural algoritmul corespunzator acetuia pentru comanda procesului.
Problemele ce apar la aceasta metoda se refera la selectia corecta a domeniului in care se incadreaza noua referinta si la evitarea salturilor de referinta.
Pentru solutionarea primei probleme a fost dezvoltata urmatoarea schema, cu particularizarea facuta pentru cazul acestei lucrari in carea avem 4 zone de functionare:
A doua problema (evitarea salturilor de referinta) este una mai delicata. Aici trebuie corelat timpul de raspuns al procesului cu alegerea algoritmilor activi. Sa presupunem ca avem un salt de referinta. Astfel, daca procesul trece mai lent de la vechiul punct de functionare la o zona noua, poate aparea situatia in care noul regulator X corespunzator referintei setate este trecut in starea activa. Insa pana a ajunge in zona impusa, preocesul va trece prin zone intermediare corespunzatoare altor algoritmi de reglare, peste care s-a sarit. Comanda aplicata procesului atat timp cat acesta evolueaza spre zona in care este activ regulatorul X, va fi deci una inadecvata. Evitarea acestei situatii se poate face folosind un filtru, sau mai general, un model de referinta.
Tinand cont ca dinamica acestui model este mai lenta decat cea a procesului, se constata ca solutia este perfect functionala, referinta rezultatain urma acestui proces avand o varaiatie continua. Se asigura in acest caz trecerea prin toate modelele intermediare, fapt ilustrat si de figura urmatoare. Daca folosim un model de referinta:
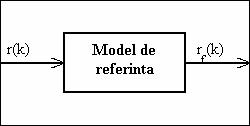
putem observa diferenta dintre evolutia referintei r(k) si evolutia referintei filtrate rf(k):
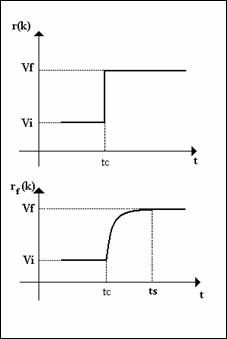
In al doilea caz, cand a fost folosit un model de referinta, se observa ca exista un interval de timp in care referinta rf(k) a ajuns de la valoarea initiala la cea finala. Cum, in majoritatea cazurilor, modelul de referinta este inclus in structura sistemului, nu vor fi intampinate dificultati in implementare.
Se recomanda in etapa de indetificare, sa fie aplicata superpozitia zonelor de indetificare a modelelor vecine, pentru a asigura rosbustetea sistemului. Aceasta va duce implicit si la suprapunerea zonelor de actiune a regulatoarelor, desi ele vor avea regiuni distincte in care vor fi active. Mai exact regulatoarele vor fi calculate pentru un deomeniu putin mai mare decat acela pe care vor actiona. Prin aceasta procedura ne asiguram ca, la comutarea intre modele, in cazul unor timpi mari de comutare sau de prelucrare a informatiilor, chiar daca sistemul a trecut in domeniul de actiune al altui regulator, regulatorul curent il mai poate controla adecvat pana la intrarea "in actiune" a regulatorului corespunzator.
Comutatorul este blocul responsabil cu selectia comenzii adecvate pentru reglarea sistemului, in conditiile unei comutari cat mai rapide si fara socuri. Comutarea intr-un timp indelungat conduce la situatia nedorita prezentata in paragraful anterior in care un regulator mai ramane o perioda activ si in afara domeniului sau de actiune, ceea ce se poate traduce in performate slabe ale sistemului de reglare. Prezenta socurilor in comanda poate avea efecte daunatoare asupra instalatiei, care in timp se pot dovedi chiar fatale acesteia.
Blocul de comutatoruljui trebuie sa aiba in componenta implementarea algoritmilor (sau a coeficientilor acestora), iar comutarea va fi realizata pe baza informatiilor provenite de la blocul de identificare a starii sau pozitie. Aceasta informatie reprezinta numarului zonei (si repectiv a noului regulator care trebuie activat).
Pentru o comutarea fara socuri dintr-o zona de functioanre in alta exsita mai multe solutii:
O solutie ar implica mentinerea tuturor regulatoarelor intr-o stare de functionare, denumita si "stare calda". In aceasta stare, toate regulatoarele functioneaza ca si cum ar fi active, primesc informatii iesirea procesului, y(k) si desprea referinta filtrata rf(k), calculeaza o comanda pe baza acestora, cu deosebire ca iesirea sa, ui(k), nu este aplicata in proces.
Alte solutii, propun combinarea comenzilor a doua sau mai multe regulatoare, ponderea fiecarei comenzi la comanda finala fiind in functie de apropierea punctului curent de domeniul in care regulatorul care a proiectat comanda respectiva este activ. Avantajul acestei abordari este ca trecerea de la un algoritm la altul se face gradual, intrucat ponderile au o evolutie continua in intervalul 0 - 1 pentru crestere si 1 - 0 pentru descrestere. Din aceasta cauza, abordarea de mai sus se preteaza lafolosirea sistemelor de tip fuzzy.
In continuare este propusa o solutie care a dat rezultate bune pentru un sistem cu o caracteristica neliniara, solutie adoptata si in cazul procesului studiat in aceasta lucrare. Datorita faptului ca am utilizat forma incrementala a algoritmului PID numeric, care nu necesita restartarea dupa fiecare modificare a parametrilor, am proiectat un singur regulator caruia pe baza informatiei primite de la blocul de comanda i se modifica parametrii, asigurand o trecere de o zona de functionare la alta fara socuri. Astfel blocul de comanda la noi este format din doua multiplexoare, care pe baza informatiei primite de la "slector" va alege parametrii portiviti pentru fiecare zona in parte.
De asememea s-a proiectat si implementat un comutator care sa asigure functionarea regulatorului in regim manual sau automat. In modul manual inforamtiile de la blocul de comanda si de la selector nu mai sunt luate in sema, comanda fiind exprimata in procente de o variabila auxialara. Mentionam ca tuturor marimilor de proces (comanda, iesirea, referinta) li s-au asociat mai intai un domeniu de functionare. La comutarea regulatorului din modul manual in cel automat informatiile de la selector si de la blocul de comanda, precum si informatia despre referinta setata de utilizator redevin active si algoritmul incepe si calculeaza din nou comenzii pentru proces.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |