
Identificarea sistemelor neliniare prin ANN ofera posibilitatea de a dispune de un model care reprezinta adecvat sistemul studiat. Pentru identificarea cu retele neurale se utilizeaza doua metode: modelarea directa si cea inversa a procesului. Renuntand la o abordare teoretica generala, vom prezenta cateva solutii practice.
Structura pentru modelare directa este una clasica de instruire supervizata, cu o arhitectura ca in Figura III.61. Reteaua neurala model este plasata in paralel cu sistemul, iar ca semnal de invatare este utilizata eroarea de predictie, adica diferenta dintre iesirea sistemului (acesta fiind instructorul care prescrie tinte) si cea a retelei. Natura dinamica a sistemului poate fi bine reprezentata prin retele recurente sau utilizarea in retele directe a unor neuroni cu comportament dinamic (ale caror intrari contin si valori corespunzatoare iesirilor si intrarilor trecute).
Daca sistemul este descris de urmatoarea ecuatie discreta cu diferente:
yp(t+1)= f (yp (t),..,yp (t-n+1);u(t),..,u(t-m+1))
adica iesirea yp a procesului la momentul t+1 depinde de n, respectiv m valori anterioare ale iesirii si intrarii, atunci este firesc sa alegem ca model al sistemului o ANN cu structura identica:
ym(t+1) = f(yp(t).,,,.yp(t-n+1);u(t),..,u(t-m+1)) (6.33)
unde f(.) reprezinta schema neliniara de intrare-iesire a retelei. Intrarile retelei includ valorile reale ale iesirii sistemului, fara ca reteaua sa aiba reactie (in figura 6.6 aceasta este figurata numai simbolic).
Daca dupa o anumita perioada de instruire reteaua da o buna reprezentare a procesului, atunci insasi iesirile retelei si valorile lor anterioare pot fi plasate pe reactie si utilizate ca intrari ale acesteia. Astfel, reteaua poate fi utilizata independent de proces si modelul va fi descris prin:
ym (t+1) = f(ym(t),.,ym(t-n+1);u(t),.,u(t-m+1))
Structura de model (6.33) este cunoscuta sub numele de serie - paralel si este avantajoasa din punct de vedere al stabilitatii. Structura (6.34) este denumita model paralel si prezinta avantajul independentei fata de perturbatiile si zgomotele de la iesirea sistemului real.
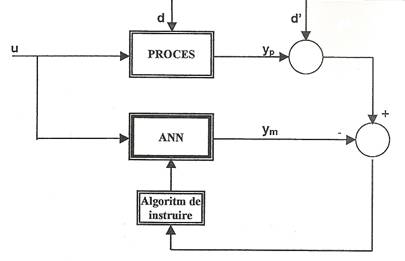
Figura III.61. Identificarea unui model direct al procesului prin ANN
Algoritmul de instruire pentru retele cu modelare directa porneste de la descrierea retelei model:
 (10.634)
(10.634)
unde ![]() este vectorul intrarilor modelului, iar
este vectorul intrarilor modelului, iar ![]() este centrul functiei gaussiene al unitatii
ascunse i. Parametrii xmi si Dm satisfac doua conditii de
interpolare: xmi
sunt uniform distribuite peste spatiul de intrare, iar Dm sunt ajustate astfel incat, peste acest
spatiu,
este centrul functiei gaussiene al unitatii
ascunse i. Parametrii xmi si Dm satisfac doua conditii de
interpolare: xmi
sunt uniform distribuite peste spatiul de intrare, iar Dm sunt ajustate astfel incat, peste acest
spatiu, ![]() = constant. Minimizarea erorii medii patratice intre
iesirile procesului real si model se face prin ajustarea vectorului
parametrilor Cmi
:
= constant. Minimizarea erorii medii patratice intre
iesirile procesului real si model se face prin ajustarea vectorului
parametrilor Cmi
:
![]() (6.35)
(6.35)
unde a este un parametru de amplificare. Utilizand teoria standard a sistemelor liniare se poate demonstra ca solutiile Cmi exista intotdeauna
Modelarea inversa are doua variante. Modelarea inversa propriu-zisa sau generala (Figura III.62a) forteaza reteaua sa reprezinte inversul procesului prin aplicarea unui semnal sintetic de invatare ss la intrarea acestuia si utilizarea iesirilor procesului ca intrari ale retelei. Eroarea utilizata de algoritmul de instruire este diferenta dintre iesirea retelei si semnalul sintetic. Metoda prezinta unele inconveniente: procedura de instruire este indirecta si complexa, semnalele de invatare trebuie sa acopere intreaga gama de intrari ale sistemului (care trebuie sa fie apriori cunoscuta), iar pentru anumite traiectorii ale sistemului se poate obtine un invers incorect.
O a doua abordare a modelarii inverse este cunoscuta sub numele de modelare inversa specializata (Figura III.62b), in care reteaua model invers precede sistemul si primeste la intrare un semnal de invatare r, care reprezinta iesirea operationala dorita a sistemului reglat (adica referinta sistemului). O a doua ANN instruita reprezinta un model direct al sistemului si este plasata in paralel cu procesul. Algoritmul de instruire prelucreaza ca eroare una din diferentele r - yp sau r - ym (in cazul cand perturbatiile din sistemul real sunt prea mari). Eroarea se propaga inapoi intre retelele model direct si invers, fiind ajustate numai ponderile celei din urma.
Relatia neliniara intrare-iesire pentru retelele ce modeleaza inversul procesului este:
![]() (6.36)
(6.36)
adica reteaua model invers primeste ca intrari iesirile curenta si trecute ale sistemului, semnalul de referinta si valorile trecute ale intrarilor sistemului. In cazul in care instruirea inversului se face utilizand iesirea ym a modelului direct, relatia (6.36) devine:
![]() (6.37)
(6.37)
Modelarea inversa specializata este mai avantajoasa decat cea inversa propriu-zisa, pentru ca procedura de instruire este directa, bazandu-se pe eroarea intre iesirea dorita a sistemului si cea reala. Pe de alta parte insa, metoda specializata permite instruirea retelei model invers numai intr-o anumita regiune de lucru a procesului, pe cand instruirea modelului general produce un invers peste tot spatiul de operare.
Algoritmii de instruire al retelei model invers porneste de la relatiile:
 (6.38)
(6.38)
Faptul ca modelul se poate utiliza si ca un controler este sugerat prin indicele c. Atunci cand se aproximeaza inversul modelului direct al procesului (si nu al procesului insusi), vectorul xc(t) de intrare al retelei (daca valoarea r(t+1) este cunoscuta) este:
![]() (6.39)
(6.39)
unde ![]() este centrul functiei gaussiene a unitatii
ascunse i.
este centrul functiei gaussiene a unitatii
ascunse i.
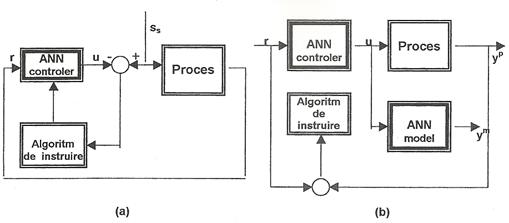
Figura III.62. Identificarea unui model invers al procesului prin ANN (a -modelare inversa propriu-zisa, b - modelare inversa specializata)
![]()
Algoritmii neiterativi utilizeaza intr-o prima varianta o arhitectura specializata de instruire conceputa de Psaltis, care ajusteaza coeficientii Cic :
Procedura de instruire
utilizeaza modelul procesului, pentru a se putea calcula derivatele din
relatia modelului. Pentru minimizarea erorii medii patratice intre
iesirea modelului direct si intrarea controlerului se utilizeaza
functia obiectiv ![]() . Daca sistemul este monoton crescator in raport cu
u(t), se obtine cert
convergeta spre un minim global. O
varianta de algoritm neiterativ utilizeaza un semnal sintetic ss, iar ponderile sunt
definite astfel incat legea de adaptare sa nu mai apeleze la calculul unor
derivate ale marimilor din proces:
. Daca sistemul este monoton crescator in raport cu
u(t), se obtine cert
convergeta spre un minim global. O
varianta de algoritm neiterativ utilizeaza un semnal sintetic ss, iar ponderile sunt
definite astfel incat legea de adaptare sa nu mai apeleze la calculul unor
derivate ale marimilor din proces:
![]() (6.40)
(6.40)
Algoritmii iterativi utilizeaza numai modelul direct al procesului, calculul inversului facandu-se pe baza unei proceduri recursive de cautare in fiecare punct de operare. Obiectivul urmarit este gasirea unei intrari u care sa produca o iesire a modelului ym(t+1) egala cu r(t+1).
Daca se utilizeaza metoda substitutiei succesive, obtinem:
![]() (6.41)
(6.41)
Metoda este rapida si are cerinte reduse de memorie, ceea ce permite realizarea unui bun compromis intre precizia retelei instruite si viteza de convergenta.
|
Politica de confidentialitate |
| Copyright ©
2026 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |