
ALTE TIPURI DE SERVOMOTOARE SINCRONE
1 Servomotoare sincrone cu histerezis
1.1 Caracterizare generala
Micromotoarele sincrone cu histerezis sunt mM sincrone cu camp magnetic statoric rotitor (produs de o infasurare bifazata sau trifazata), care au rotorul construit din material feromagnetic dur, cu ciclu lat de histerezis.
Pentru perioada de pornire aceste mM utilizeaza un cuplu de pierderi prin histerezis magnetic, care apare ca urmare a existentei unei alunecari intre campul magnetic invartitor statoric si rotor. Datorita vitezei relative dintre campul magnetic statoric si rotor un punct oarecare din materialul activ rotoric este supus unei magnetizari ciclice alternative, a carei frecventa este egala cu frecventa de alunecare, f2 = sf1.
Cuplul electromagnetic care apare, numit cuplu de histerezis depinde de marimea suprafetei ciclului de histerezis, specifica materialului rotoric si este constant, independent de alunecare. Marimea cuplului de histerezis este egala cu valoarea maxima a cuplului din regimul sincron de functionare.
Marimea constanta a cuplului de histerezis, in toata perioada de pornire (la orice valoare a alunecarii), constituie un avantaj fata de oricare alt mod de pornire in asincron si justifica utilizarea cu precadere a acestui motor pentru actionarea cu viteza constanta a dispozitivelor cu masa inertiala mare cum sunt giroscoapele.
Odata atinsa viteza de sincronism ![]() (1), unde f1
frecventa de alimentare in stator, iar p numarul de perechi de poli ai
infasurarii statorice, motorul are o functionare
clasica de motor sincron cu magneti permanenti pe rotor.
Magnetizarea permanenta a rotorului corespunde starii de magnetizare
atinse in momentul ajungerii la sincronism. Valoarea cuplului dezvoltat la
sincronism depinde conform unei legi in sinus, de unghiul de decalaj intre
campurile magnetice rotitoare,
statoric, si al magnetilor rotorici ; acest unghi nu poate
depasi valoarea unghiului de intarziere histerezica specific
materialului rotoric activ folosit.
(1), unde f1
frecventa de alimentare in stator, iar p numarul de perechi de poli ai
infasurarii statorice, motorul are o functionare
clasica de motor sincron cu magneti permanenti pe rotor.
Magnetizarea permanenta a rotorului corespunde starii de magnetizare
atinse in momentul ajungerii la sincronism. Valoarea cuplului dezvoltat la
sincronism depinde conform unei legi in sinus, de unghiul de decalaj intre
campurile magnetice rotitoare,
statoric, si al magnetilor rotorici ; acest unghi nu poate
depasi valoarea unghiului de intarziere histerezica specific
materialului rotoric activ folosit.
Functionarea servomotorului sincron cu histerezis se bazeaza pe utilizarea fenomenului de intarziere magnetica. Initial, aceste masini au fost folosite pentru antrenarea mecanismelor de ceasornic, functionand practic in gol, la randamente η = 0,150,5%, puterea absorbita fiind de 23W, iar puterea utila de 0,0050,01W. Descoperirea unor materiale magnetic dure, cu inductie remanenta si camp coercitiv mare, a permis construirea de servomotoare cu histerezis cu puteri de ordinul sutelor de wati, la frecvente de501200Hz, cu randamente de pana la 80%.
Utilizarea servomotoarelor sincrone cu histerezis se datoreaza calitatilor lor deosebite, dintre care mai importante sunt: constructie simpla, robusta, fara contacte alunecatoare; siguranta in exploatare; greutate specifica mai mica (la 400 Hz) decat a servomotoarelor sincrone reactive si a celor cu magneti permanenti; pornire simpla, fara dispozitive speciale; curent mic de pornire numai cu 1020% mai mare decat cel de mers in gol; intrare automata si fara socuri in sincronism; functionare stabila atat in regim sincron, cat si in regim asincron si, in sfarsit, variatii mici ale curentului (1...3%) la trecerea de la sarcina maxima la mersul in gol.
In comparatie cu motoarele asincrone de aceeasi putere, ele au un factor de putere mai mic (0,2. ..0,5), care scade o data cu cresterea puterii si a intrefierului, in special la masinile cu putere mai mare de 100W; au o greutate specifica mai mare, o oarecare inconstanta a caracteristicilor. Acestea depinzand de starea magnetica anterioara a masinii; la suprasarcini repetate, randamentul si factorul de putere scad.
Domeniile de utilizare a servomotoarelor sincrone cu histerezis sunt variate si, pe masura perfectionarii acestora, din ce in ce mai multe. Aceste servomotoare sunt utilizate in scheme de urmarire, in sisteme de reglaj prin impuls al vitezei, in actionarea cu viteza riguros constanta a dispozitivelor de memorie, pentru giromotoare in aviatie si navigatie etc.
1.2 Principiul de functionare si constructie mMS cu histerezis
Pentru a evidentia principiul de producere a cuplului de histerezis se considera o masina electrica la care statorul, echipat cu o infasurare polifazata, alimentata cu un sistem trifazat simetric de tensiuni de frecventa f1, produce un camp magnetic rotitor circular (de inductie maxima constanta in intrefier), iar rotorul este construit neted, din material feromagnetic cu ciclu lat de histerezis.
Expresia cuplului de histerezis se poate deduce pe baza teoremei fortelor generalizate, folosind derivata energiei magnetice medii inmagazinate in sistem, Wm in raport cu coordonata generalizata unghiul de pozitie rotorica, q, la flux constant.
Deoarece energia magnetica din infasurarea statorica nu depinde de pozitia unghiulara a rotorului care este o armatura neteda, fara variatii de reluctanta, derivata sa in raport cu q este nula. Asadar, in derivata Wm intervine doar energia magnetica inmagazinata in materialul rotoric activ, cu ciclu lat de histerezis care, conform teoriei Warburg ,
are expresia:
![]() , (4)
, (4)
unde:
![]() - frecventa din rotor,
- frecventa din rotor, ![]() ;
;
SH - suprafata ciclului de histerezis, marime specifica materialului;
VH - volumul materialului cu histerezis;
T - intervalul de timp ales, egal cu o perioada sau
un numar intreg de perioade de magnetizare in rotor. S-a notat cu s
alunecarea rotorului a carui viteza este notata cu W,
fata de campul magnetic rotitor statoric, de viteza ![]() , p fiind
numarul de perechi de poli,
, p fiind
numarul de perechi de poli,
![]() . (5)
. (5)
Unghiul de pozitie a rotorului la momentul de timp fixat T, rezulta:
![]() ,
,
astfel incat, alunecarea fiind singura marime variabila, se obtine:
![]() .
.
Cuplul electromagnetic de histerezis, obtinut in regim de alunecare variabila, capata expresia:
![]() . (6)
. (6)
Asadar, cuplul de histerezis este constant,
independent de alunecare, ceea ce constituie un avantaj important in
aplicatii. El este un cuplu electromagnetic activ, M > 0, indreptat
spre cresterea unghiului q atat
timp cat s > 0 (regim subsincron);
atunci cand s < 0, corespunzator unui regim suprasincron (determinat de
o antrenare a rotorului din exterior, la ![]() ), M
schimba brusc de semn, M < 0, constituind un cuplu de hisrezis
rezistent, de franare i figura 5.4), iar masina functioneaza in
regim de generator.
), M
schimba brusc de semn, M < 0, constituind un cuplu de hisrezis
rezistent, de franare i figura 5.4), iar masina functioneaza in
regim de generator.
Valoarea cuplului specific pe unitatea de volum (Nm/m3), obtinut prin conversia electromecanica bazata pe histerezis rezulta de cateva zeci de ori mai mica decat in cazul procedeului electromagnetic (mM sincron cu MP), atunci cand comparatia se face considerand valori ale incarcarilor electromagnetice corespunzatoare domeniului de puteri nominale medii.
mM cu histerezis se construiesc insa uzual pentru puteri de ordinul cativa watt si zeci de watt, domeniu pentru care mM sincron cu MP admit solicitari electromagnetice (patura de curent si inductia magnetica) mai scazute; in consecinta, la puteri similare, din aceasta gama, mM cu histerezis prezinta un cuplu specific de numai 1,5-2 ori mai mic, decat al convertoarelor electromagnetice si sunt recomandate pentru numeroase aplicatii .
Vom evidentia principalele fenomene fizice care explica trecerea intre regimurile asincron si sincron de functionare . Pentru aceasta, sa consideram mai intai cazul in care pe stator s-ar gasi o infasurare monofazata care creeaza un camp magnetic pulsator de-a lungul axei fixa in spatiu a bobinajului, iar rotorul ar fi mobil.
Solenatia de excitatie statorica, ![]() ,
intensitatea campului statoric, Hs si inductia sa magnetica, Bs
(respectiv fluxul statoric,
,
intensitatea campului statoric, Hs si inductia sa magnetica, Bs
(respectiv fluxul statoric, ![]() )
variaza sinusoidal, simfazic, in ipoteza admisibila a unui mediu
magnetic liniar.
)
variaza sinusoidal, simfazic, in ipoteza admisibila a unui mediu
magnetic liniar.
In materialul rotoric activ, ca urmare a
magnetizarii alternative si a parcurgerii ciclului lat de histerezis,
inductia magnetica rotorica Br
respectiv fluxul rotoric, ![]() sunt defazate cu unghiul de intarziere magnetica
sunt defazate cu unghiul de intarziere magnetica ![]() , in
urma fata de intensitatea campului magnetic rotoric
(armonica fundamentala),
, in
urma fata de intensitatea campului magnetic rotoric
(armonica fundamentala), ![]() , (Fig.5.1).
Intensitatea
, (Fig.5.1).
Intensitatea ![]() la randul ei, este in faza cu
solenatia statorica
la randul ei, este in faza cu
solenatia statorica ![]() , de
catre care este creata, si implicit este in faza cu Bs
si
, de
catre care este creata, si implicit este in faza cu Bs
si ![]() .
.
Defazajul gH intre marimile Br si Hr ale campului magnetic din materialul activ rotoric
Asadar, intre fluxurile magnetice alternative din
stator si din rotor, ![]() si
si ![]() ,
exista un defazaj in timp, egal cu unghiul de intarziere magnetica
,
exista un defazaj in timp, egal cu unghiul de intarziere magnetica ![]() specific materialului: fluxul rotoric
specific materialului: fluxul rotoric ![]() este defazat in urma (are o variatie
inrarziata) in raport cu fluxul statoric
este defazat in urma (are o variatie
inrarziata) in raport cu fluxul statoric ![]() .
.
Cele doua fluxuri fiind coliniare (fig.5.2a) nu are loc producerea unui cuplu de rotatie.
Sa consideram acum statorul cu o
infasurare polifazata care creeaza un camp magnetic
invartitor circular, rotorul fiind si de aceasta data calat,
imobil. Materialul rotoric activ este acum magnetizat ciclic alternativ de
catre campul magnetic statoric in miscarea sa de rotatie; in
acest caz, defazajul in timp ![]() de intarziere histerezica intre fazorii
de intarziere histerezica intre fazorii ![]() (respectiv
(respectiv
![]() ) si
Br (respectiv
) si
Br (respectiv ![]() ) se transpune
intr-un decalaj in spatiu, de aceeasi valoare unghiulara in
grade electrice: fazorul spatial flux rotoric,
) se transpune
intr-un decalaj in spatiu, de aceeasi valoare unghiulara in
grade electrice: fazorul spatial flux rotoric, ![]() se va gasi in urma cu unghiul
se va gasi in urma cu unghiul ![]() fata de fazorul spatial flux
statoric,
fata de fazorul spatial flux
statoric, ![]() , (in
raport cu sensul de rotatie al campului statoric).
, (in
raport cu sensul de rotatie al campului statoric).
Decalajul gH intre campurile Bs si Br la functionarea in regim asincron
Acest fapt
determina producerea unui cuplu de interactiune, de antrenare a
rotorului in sensul campului rotitor statoric, proportional cu produsul
vectorial al fazorilor ![]() si
si ![]() care se rotesc cu aceeasi viteza dar
prezinta decalajul spatial fix,
care se rotesc cu aceeasi viteza dar
prezinta decalajul spatial fix, ![]() :
:
![]() . (7)
. (7)
Decalajul spatial ![]() intre
intre ![]() si
si ![]() este acelasi pentru intreg regimul
asincron de functionare a motorului, oricare ar fi alunecarea si deci
oricare ar fi viteza rotorului, n < n1. Unghiul
este acelasi pentru intreg regimul
asincron de functionare a motorului, oricare ar fi alunecarea si deci
oricare ar fi viteza rotorului, n < n1. Unghiul ![]() de care depinde valoarea cuplului constant
este determinat doar de proprietatile materialului activ in special
de valoarea campului coercitiv Hc.
de care depinde valoarea cuplului constant
este determinat doar de proprietatile materialului activ in special
de valoarea campului coercitiv Hc.
1.3 Constructia servomotoarelor cu histerezis, asemanatoare aceleia a motoarelor asincrone cu rotor masiv, este aratata schematic in fig. urmatoare:
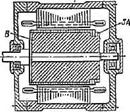
Fig.. 1 Sectiunea transversala, printr-un motor sincron cu histerezis.
Statorul se construieste identic cu al motoarelor sincrone si asincrone, (trifazat sau bifazat), uzual ca armatura neteda, cu crestaturi si infasurare repartizata. Se remarca utilizarea uneori a constructiei cu stator interior si rotor exterior destinata sa creasca momentul de inertie al ansamblului, in aplicatii de tip giroscop. . Statorul S, construit din tole de otel electrotehnic izolate, are crestaturi semiinchise sau inchise. Penele sunt executate din material feromagnetic, pentru reducerea ponderii armonicilor superioare din curba de repartitie a inductiei in intrefier.
Rotorul, fig.5.3 se realizeaza partial sau total din material feromagnetic cu ciclu de histerezis cu suprafata mare Rotorul este constituit dintr-un butuc B din material feromagnetic (de exernplu, otel Armco) sau paramagnetic (aluminiu ori material plastic), pe care este fixat stratul activ SA. Rotorul are, de regula, forma de cilindru circular drept, fara crestaturi sau poli aparenti.
Stratul activ se executa din materiale magnetice dure si are forma unei camasi cilindrice, realizate, fie prin turnare, fie prin presare din materiale pulverulente sau prin impachetare din tole in forma, de coroane circulare. S-au construit, de asemenea, servornotoare sincrone cu histerezis, la care stratul activ este executat prin bobinare elicoidala, intr-un strat de banda. Aceasta permite obtinerea unor insemnate economii de material prin reducerea deseurilor si imbunatatirea performantelor. Se recomanda ca pentru masinile de puteri mai mici de 5W sa se foloseasca aliaje Fe-Ni-Mn, pentru motoare cu puteri intre 5 si 100W - aliaje de tipul Vicaloy (Fe-Co-V), iar pentru masini cu puteri mai mari de 100W - aliaje de tipul Alni si Alnico. Amplasand in interiorul statorului un motor asincron cu un rotor format dintr-un cilindru masiv fara bobinaje, executat din material magnetic dur si conectand bobinajul statoric la retea, rotorul va porni, fiind antrenat de cuplul activ propriu, care, in acest caz, are doua componente:
M = MT +MH (2)
unde:
MT - este cuplul creat de actiunea mutuala a campului invartitor inductor cu curenti turbionari ai rotorului;
MH - cuplul creat datorita fenomenului de histeresis la remagnetizarea rotorului (cuplu de histerezis).
Cuplul MT este de aceeasi natura ca si la servomotoarele asincrone executate cu rotor nemagnetic sau magnetic in forma de pahar.
Ca urmare a rezistivitatii mari a materialului rotorului, acest cuplu atinge valoarea maxima in cazul rotorului calat (s = l), iar la viteza de sincronism (s = 1) el devine nul.
Pentru s < 0, adica in cazul vitezelor superioare, cuplul MT devine negativ, adica masina devine generator.
Cuplul este:
MT
=sMTk =(1 - ![]() (3)
(3)
unde: MTk este cuplul in cazul rotorului calat, adica cuplul initial de pornire.
. Dupa modul de plasare a materialului activ se disting mai multe variante utilizate.
In fig.5.a materialul activ este, sub forma unui cilindru, pe un butuc de otel obisnuit. In varianta din fig.5. b cilindrul din material activ se aplica peste un miez rotoric cu proeminente polare care favorizeaza aparitia unui cuplu sincron de reluctanta, suplimentar.
Varianta de rotor pentru motorul sincron cu histerezis
In varianta din fig.5.c camasa cilindrica din material activ se plaseaza pe un miez neferomagnetic, liniile de camp inchizandu-se de aceasta data tangential prin materialul cu ciclu de histerezis.
In toate variantele prezentate se urmareste reducerea cantitatii de material feromagnetic cu pierderi prin histerezis mari, datorita costului ridicat al acestora.
In fig.5.4 se prezinta caracteristica pierderilor
prin histerezis ![]() functie de campul magnetic
functie de campul magnetic ![]() pentru diverse materiale feromagnetice dure .
Aceste materiale trebuie sa prezinte valori cat mai mari pentru pierderile
specifice pH si pentru inductia remanenta Brem.
pentru diverse materiale feromagnetice dure .
Aceste materiale trebuie sa prezinte valori cat mai mari pentru pierderile
specifice pH si pentru inductia remanenta Brem.
1.4 Caracteristici de functionare ale mMS-H
In fig.5.5 se prezinta carcateristica cuplu functie de viteza pe care se pune in evidenta si regimul suprasincron, n > n1. Se remarca valoarea cuplului de histerezis, MH constanta in intreg domeniul de functionare in asincron de la n = 0 la n = n1.
Caracteristica notata cu (2) in fig.5.5 reflecta faptul ca la alunecari mari apare si un cuplu suplimentar de tip asincron determinat de stabilirea curentilor Foucault in materialul rotoric conductor, masiv, care depinde de frecventa de alunecare, fiind maxim la pornire.
Pentru o masina de lucru care prezinta o caracteristica de tipul (3) in fig.5.5, punctul de functionare A se stabileste in domeniul functionarii sincrone.
Pentru o caracteristica a cuplului rezistent de tip (4) functionarea se stabileste in punctul B, in regim asincron. Functionarea de durata in regim asincron poate conduce la supraincalzirea rotorului prin pierderi in fier. Acest regim trebuie evitat prin alegerea adecvata a motorului.

In fig.5.6 pe langa caracteristica mecanica ![]() se mai prezinta dependenta in
functie de cuplul M, a curentului I, puterii absorbite P1 si a
puterii la arbore, P2. Se remarca faptul ca atat in regim sincron cat
si in regim de pornire in asincron, curentul I absorbit de motor se
modifica foarte putin, in limite de 10%-20% de la pornire la mersul
in gol si de 1-3% de la gol la
incarcare nominala. Acest fapt reprezinta un avantaj deosebit
fata de pornirea motoarelor asincrone, caracterizata de valori
mari ale curentului de pornire (
se mai prezinta dependenta in
functie de cuplul M, a curentului I, puterii absorbite P1 si a
puterii la arbore, P2. Se remarca faptul ca atat in regim sincron cat
si in regim de pornire in asincron, curentul I absorbit de motor se
modifica foarte putin, in limite de 10%-20% de la pornire la mersul
in gol si de 1-3% de la gol la
incarcare nominala. Acest fapt reprezinta un avantaj deosebit
fata de pornirea motoarelor asincrone, caracterizata de valori
mari ale curentului de pornire (![]() ).
).
Factorul de putere al acestor mM este in mod specific foarte scazut, rezultat al unei puteri reactive absorbite mari, putere necesara pentru asigurarea caderii de tensiune magnetica in intrefier, ca si in zona materialului rotoric activ care prezinta o permeabilitate mult mai redusa decat a materialelor feromagnetice uzuale.
Gradul de magnetizare a materialului rotoric mai precis valorile inductiei magnetice remanente, a campului magnetic coercitiv, respectiv a suprafetei ciclului de histerezis si implicit valoarea cuplului de histerezis dezvoltat, MH, egal cu valoarea maxima a cuplului sincron, se pot mari prin cresterea tensiunii cu care este excitata infasurarea statorica.
Pe baza acestui principiu, pentru imbunatatirea performantelor, adesea un mMS-H se supraexcita in tensiune, pentru un timp scurt de ordinul zecimilor de secunda la pornire. Alimentarea de scurta durata la pornire, la o tensiune superioara celei nominale se poate face pentru un mMS-H care in regim normal functioneaza in stea, prin conectarea infasurarii statorice in triunghi pentru un foarte scurt timp si trecerea apoi la conexiunea normala in stea.
In fig.5.6 caracteristicile astfel obtinute prin 'fortarea' tensiunii la pornire (trasate cu linie intrerupta) sunt comparate cu cele 'normale' remarcandu-se imbunatatirile obtinute: cresterea cuplului de histerezis, egal cu cuplul sincron maxim, MH = Ms max si reducerea curentului absorbit de la retea.
La trecerea prin sincronism, ( s = 0 sau rn = 1), ceea ce se poate realiza aplicand rotorului un cuplu exterior separat, unghiul deci si cuplul Mh isi schimba sensul, adica masina trece in regim de generator cu histerezis.
Daca curba de variatie a cuplului rezistent Mr al sarcinii in functie de turatie are forma curbelor C1 sau C2 din Fig. 5.7 , adica daca in toata gama de valori a alunecarii, de la 1 la 0, Mr < MH, servomotorul va lucra stabil la viteza de sincronism. Daca insa cuplul rezistent variaza dupa curba C3 viteza stabila apare la alunecarea corespunzatoare punctului A si masina va lucra in regim asincron. In sfarsit, daca Mr > Mh , rotorul se va opri. Prin urmare, in cazul unui cuplu rezistent constant, servomotorul poate lucra numai ca servomotor sincron, daca bineinteles Mr < MH
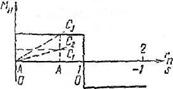 Fig 8
Fig 8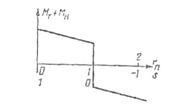 Fig.
5.7 .Caracteristica cuplului histerezis Caracteristica mecanica a motorului cu MH= F(s) la motoarele cu histerezis. histerezis
Fig.
5.7 .Caracteristica cuplului histerezis Caracteristica mecanica a motorului cu MH= F(s) la motoarele cu histerezis. histerezis
Cum s-a mai spus, un rotor masiv executat din material magnetic dezvolta cupluri MT si MH, care, masurandu-se, dau caracteristica mecanica aratata in Fig. 5.8
Daca rotorul nu se executa ca o piesa masiva, ci din tole subtiri, folosind ca material un aliaj magnetic dur, de exemplu Vicaloy, se poate reduce considerabil cuplul Mr datorita curentilor turbionari. Aceasta reducere este determinata nu numai de stratificarea pachetului rotoric, ci si de rezistenta electrica marita a aliajelor magnetice dure. Pe de alta parte, folosind materiale magnetice mai putin dure (Alnico, Alni etc.), se poate reduce cuplul de histerezis si se poate obtine o masina care sa se apropie prin proprietatile ei de servomotorul asincron cu rotor masiv obisnuita. In cele ce urmeaza, vom presupune ca nu exista, cuplu datorita curentilor turbionari, adica vom admite ipoteza ca servomotorul este de tip pur histerezis.
Energia pierduta prin histerezis pe durata unui ciclu complet, pe unitatea de volum de material magnetic, este reprezentata prin suprafata buclei de histerezis:
PH=![]()
Pentru a determina pe PH, trebuie rezolvate ecuatiile lui Maxwell si gasita repartitia lui H si B in rotor. Insa, deoarece legatura intre inductia B si campul H este neliniara, aceasta cale este complicata. Practic, pierderile prin histerezis se determina folosind cunoscuta relatie:
PH =KH![]()
In care:
- kH = 1,6 este un coeficient care tine seama de cresterea pierderilor, ca urmare, a histerezisului rotativ;
- e - o constanta care depinde de materialul rotorului si care se determina experimental;
- B - amplitudinea inductiei magnetice, in [T];
- Gm- greutatea materialului magnetic dur.
Cu acestea cuplul de histerezis este:
![]()
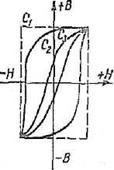
Fig. 5.9 Forme ale ciclului de histerezis.
Prin urmare, un mijloc radical de marire a cuplului activ al servomotorului cu histerezis este utilizarea materialelor magnetice dure avand o bucla larga de histerezis. Ideala ar fi fost bucla C1, de forma dreptunghiulara, aratata punctata in Fig. 5.9. Materialele moderne de tip Vicaloy se apropie destul de mult de acest ideal, dupa cum arata curba C2.
Oteluriie obisnuite folosite in constructia de masini electrice au o bucla de histerezis ingusta C3 si nu pot asigura un cuplu de histerezis de o valoare mai mare.
O distributie ideala a campului magnetic in servomotorul cu histerezis are loc la o variatie sinusoidala a tensiunii magnetice de-a lungul intrefierului. In acest caz, in regim asincron, in care exista o alunecare a rotorului in raport cu campul invartitor, inductia din fiecare punct al rotorului variaza continuu dupa aceeasi bucla de histerezis. In schirab, in regim permanent de functionare sincrona, inductia in fiecare punct al rotorului ramane constanta.
Cei mai importanti factori care determina o abatere de la acest caz ideal sunt armonicile bobinajelor, datorite caracterului nesinusoidal al curbei de distributie spatiala a solenatiei statorice si existentei dintilor statorului. Daca inlaturarea sau - in orice caz - reducerea substantiala a armonicilor spatiale ale solenatiei nu prezinta greutati deosebite si se poate face printr-o alegere corespunzatoare a bobinajului, indepartarea armonicilor provocate de dinti este mult mai complicata, intrucat obisnuitele masuri prin inclinarea crestaturilor sunt aici insuficiente din cauza rotorului neted.
O masura radicala este folosirea crestaturilor complet acoperite sau, in caz extrem, folosirea penelor de ferita. Grosimea puntii sau a penei trebuie sa fie minima, tinand insa seama de rezistenta lor mecanica.
In masinile asincrone si sincrone obisnuite, inchiderea crestaturilor influenteaza nefavorabil caractertsticile si reduce factorul de putere si randamentul, datorita cresterii dispersiei. Totusi, in servomotoarele cu histerezis, acoperirea crestaturilor are avantaje care depasesc neajunsurile indicate. Astfel, aici, acoperirea crestaturilor duce la o marire a cuplului cu circa 70%. Factorul de putere al servomotoarelor sincrone cu histerezis este redus (de obicei, 0,20,5) si, spre deosebire de servomotoarele sincrone, scade o data cu cresterea puterii nominale a servomotorului. Din acest punct de vedere, servomotoarele sincrone cu histerezis, de putere relativ mare, sunt inferioare servomotoarelor asincrone. Se poate obtine o marire destul de insemnata a factorului de putere prin magnetizarea suplimentara a rotorului, folosindu-se metoda numita de supraexcitare care consta in marirea de ,.4 ori, timp de 0,2 0,5 s, a curentului absorbit, prin marirea tensiunii aplicate la borne. Operatia poate fi executata, fie la functionarea masinii in regim de motor sincron, fie in timpul pornirii, tensiunea reducandu-se pana la valoarea nominala dupa intrarea in sincronism. Aceasta din urma metoda permite totodata si reducerea timpului de pornire. Cresterea tensiunii poate fi realizata prin conectarea temporara a bobinajelor statorice in triunghi deschis sau prin conectarea unor condensatoare in serie cu bobinajele fazeior statorice. Condensatoarele se aleg pentru un regim apropiat de rezonanta tensiunii. Dupa terminarea operatiei de supraexcitare, condensatoarele se leaga automat in paralel cu bobinajele fazelor sau se scurtcircuiteaza.
Marirea factorului de putere si a randamentului se explica prin faptul ca, in timpul operatiei de supraexcitare, punctul de functionare se deplaseaza, din varful ciclului de histerezis corespunzator tensiunii nominale, in varful altui ciclu cu aria mai mare, corespunzator tensiunii marite.
Operatia de supraexcitare, desi eficienta din punctul de vedere al performantelor servomotoarelor sincrone cu histerezis, nu este raspandita in exploatare din cauza greutatii si gabaritului mari ale complicatei aparaturi necesare. In afara de aceasta, servomotorul cu histerezis supraexcitat, fiind asemanator cu un servomotor sincron cu magneti nestabilizati (rotorul este magnetizat dupa montare, cu ajutorul bobinajuiui statoric), are o functionare nestabila si este supus oscilatiilor pendulare.
Curentul de magnetizare poate fi micsorat reducand inductia in intrefier, operatie care, la randul ei, depinde de valoarea inductiei maxime din stratul activ, deci si de grosimea acestuia. La rotoarele cu butuc paramagnetic (cu distributie tangentiala a inductiei in stratul activ), fluxul magnetic inchizandu-se practic numai prin stratul activ, inductia magnetica din intrefier este proportionala, cu produsul dintre inductia maxima Bm si grosimea relativa a stratului activ. La rotoarele cu butuc feromagnetic cu distributie radiala, fluxul magnetic strabate stratul activ si se inchide intr-o masura importanta prin butuc. Din aceasta cauza, numai la rotoarele cu butuc paramagnetic inductia in intrefier poate fi variata prin schimbarea simultana a inductiei maxime BM si a grosimii stratului activ. Din acest motiv, la servomotoarele de putere mica este preferabila folosirea rotoarelor cu butuc paramagnetic, ce permite obtinerea unor valori mai reduse ale inductiei.
Rotoarele cu butuc feromagnetic se executa cu stratul activ lamelat numai la servomotoarele cu cuplu de pornire mic (Mp/MM<1,1). La servomotoarele cu cupru mai mare (Mp/MM>1,2), rotoarele se executa cu stratul activ masiv, dispus pe un butuc de otel, pentru a se putea obtine astfel un cuplu suplimentar produs de curentii turbionari. Pe aceasta cale, cuplul de pornire poate fi marit pana la dublul valorii cuplului maxim din regimul sincron.
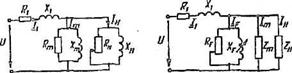
Functionarea servomotoarelor cu histerezis poate fi studiata pe baza schemelor echivalente, atat pentru regimul sincron (Fig. 5.10.a), cat si pentru cel asincron (Fig. 5.10.b).
![]()
a) b)
Fig. 5.10 Schema echivalenta a motoruhd cu histerezis:
a - in regim sincron; b -in regim asincron.
Impedanta Zm
= Rm + jXm a ramurii de magnetizare este constanta si poate fi calculata cu relatiile: ![]()
![]()
![]()
in care:
E - t.e.m. indusa in bobinajul statoric;
PFs - reprezinta pierderile in fierul statoric;
lR- lungimea rotorului;
m - numarul fazelor masinii;
w - numarul de spire pe faza statorului;
kw - factorul de infasurare statoric;
δ' - intrefierul echivalent;
τp- pasul polar;
p - numarul de perechi de poli.
In ramura a doua a schemei, impedanta Zh=Rh+ jXH corespunde fenomenului de histerezis din stratul activ al rotorului. Rezistenta RH si impedanta Zh sunt constante la functionarea masinii in regim asincron. Reactanta XH ramane practic constanta pentru ambele regimuri de functionare. Acesti parametri nu corespund unor marimi fizice bine determinate, fiind marimi pur conventionale (de calcul).
Impedanta echivalenta ramurilor in derivatie este:

Notand:
![]()
se obtine pentru rezistenta rotorica echivalenta expresia:
Rr = RH![]()
si pentru reactanta inductiva:
XR = XH
![]()
Rezistenta si reactanta inductiva echivalente totale ale servomotorului, conform schemei sunt:
Re = R1 + RR; Xe = X1 + XR
in care:
- R1 este rezistenta infasurarii unei faze;
 - X1 - reactanta
corespunzatoare fluxului de dispersie.
- X1 - reactanta
corespunzatoare fluxului de dispersie.
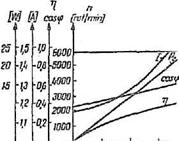
Fig. 5.11 Caracteristicile functionale calculate la un motor sincron cu histerezts avand P2=15W.
In Fig. 5.11, sunt date caracteristicile predeterminate (calculate) la un servomotor sincron cu histerezis avand P2 = 15W.
Caracteristiciie reale ale masinii difera mult de cele calculate, deoarece, la stabilirea relatiilor de calcul, nu se tine seama de influenta armonicilor superioare ale inductiei in intrefier, de magnetismul remanent din stratui activ, de caracterul variatiilor cuplului de rotatie s.a. Aceste diferente ajung pana la 2530%.
2 Alte servomotoare sincrone de mica putere
2.1 Generalitati
In afara de tipurile de servomotoare sincrone descrise, mai sunt folosite o serie de alte servomotoare sincrone de mica putere, de constructie speciala. Functionarea acestor masini se bazeaza pe utilizarea acelorasi fenomene ca si la masiniie descrise mai sus si reprezinta, de fapt, variante ale servomotoarelor sincrone reactive sau ale celor cu histerezis. Performantele acestor masini sunt inferioare celor ale servomotoarelor reactive sau celor cu histerezis si, de aceea, au o utilizare mai restransa.
2.2 Cateva tipuri de servomotoare sincrone cu magneti permanenti
Constructia uzuala a masinilor sincrone cu magneti permanenti este cu poli aparenti interiori (rotorici), deoarece folosirea indusului rotor anuleaza unul dintre principalele avantaje ale acestor masini, necesitand un contact alunecator.
Se deosebesc doua tipuri constructive in ce priveste sistemul inductor:
rotoare cu poli aparenti de tip stea;
rotoare cu constructie in forma de gheara.
Rotoarele in forma de stea (Fig. 1) prezinta urmatoarele avantaje: - simplitatea constructiei si a fabricatiei;
- micsorarea dimensiuniior masinii, in comparatie cu alte tipuri, prin cresterea factorului de acoperire polar.
Principalele neajunsuri sunt:
valoarea mica a energiei magnetice specifice, in comparatie cu alte tipuri de rotoare;
puternica influenta a fluxului de reactie a indusuiui;
rezistenta
mecanica mica, ceea ce limiteaza valoarea turatiei. 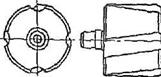
Fig. 1 Rotor in forma de stea la masina sincrona cu magneti permanenti
Ca o consecinta a formei polilor, fluxul de reactie al indusului produce o demagnetizare pronuntat asimetrica a campului intrefier, deci forma curbei t.e.m. a masinii depinde de caracterul sarcinii.
Puterea limitata a masinilor cu rotor de tip stea este determinata de calitatea materialului magnetului permanent, de frecventa si de factorul de putere. Astfel, pentru aliajele moderne ale magnetilor permanenti, pentru frecventa de 400Hz si cosφ = 0,8, puterea limita este de 3kW.
Rotoarele in forma de gheara sunt alcatuite dintr-un magnet cilindric, din doua armaturi de otel moale, care prezinta proeminente in forma de gheara, de unde si numele tipului de poli. Fiecare dintre armaturi, impreuna cu polii respectivi, are aceeasi polaritate. Magnetii sunt fixati in niste crestaturi ale armaturilor polare si se strang in partea frontala. Arborele se executa din otel nemagnetic sau se interpune o bucsa din material nemagnetic, pentru a nu sunta fluxul magnetic util al sistemului inductor.
Rotorul in forma de gheara este mai greu de executat, in schimb indeparteaza unele din neajunsurile aratate ale rotorutui in forma de stea. Actiunea demagnetizanta a reactiei indusului este mai mica in acest caz, atat in regim tranzitoriu, cat si in cel stabilizat. Aceasta se explica prin curentii turbionari ce se produc in regim tranzitoriu in piesele din otel moale si prin cresterea dispersiei in poli-gheara, o data cu componenta longitudinala a reactiei indusului. Ca o consecinta, se pot admite la acest tip de masini o sarcina liniara marita pana la 250A/cm si o inductie in intrefier pana la 0,7Wb/m2. Magnetul de forma cilindrica se poate executa mai usor decat cel in forma de stea, iar rezistenta sa mecanica mai mare permite folosirea unei viteze periferice marite, pana la 100m/s. Ca o consecinta a cresterii incarcarilor electromagnetice si a turatiei, masinile de acest tip se construiesc cu puteri pana la cativa kilowati

Fig. 2 Motor sincron cu ferita Crouzet tip 82.340.
Industria moderna de servomotoare de mica putere in domeniul pana la cativa wati prezinta o serie de servomotoare sincrone cu magneti permanenti de ferita. Astfel, uzinele Crouzet prezinta tipul 82.340 cu alimentare la 1I5/230V, 50Hz (Fig. xxxx), cu caracteristicile date in tabelul 1
Acest servomotor este de forma cilindrica, statorul avand 5 perechi de poli formati prin doua piese ambutisate. Rotorul are, de asemenea, 5 perechi de poli din magneti permanent din ferita sinterizata cu un camp coercitiv foarte puternic. Sensul de rotatie este impus de un dispozitiv cu clichet. Servomotorul poate functiona cu doua tensiuni, are trei fire de alimentare ce duc la doua bobine suprapuse si complimentare. Cu acest tip de servomotor, se poate obtine o oprire neta in momentul intreruperii curentului de alimentare, realizand astfel o franare instantanee. Timpul necesar servomotorului pentru a atinge viteza de sincronism este de 0,1s, la temperatura ambianta de 25°C.
Tab. 1. Caracteristicile servomolondui sincron cu ferita reprezentat inFig. xxxx
|
Caracteristicile |
115V |
230 V |
|
Curent de mers in gol, mA | ||
|
Incalzire, °C | ||
|
Turatie, rot/min | ||
|
Putere absorbita, W | ||
|
Cuplu util, N-cm | ||
|
Cuplu de prindere, N-cm | ||
|
Cuplu de desprindere, N-cm | ||
|
Temperatura ambianta, °C: minima | ||
|
maxima | ||
|
Greutate, g |
![]() Aceeasi
firma produce un tip similar de servomotor nr. 82.360 functionand cu
o singura tensiune, in
schimb avand ambele sensuri de rotatie. Statorul (cu 2p=10) se
compune din patru piese
ambutisate prinse pe doua flanse formand cutia servomotorului.
Rotorul este format dintr-un magnet permanent ceramic, de asemenea avand un
camp coercitiv puternic.
Aceeasi
firma produce un tip similar de servomotor nr. 82.360 functionand cu
o singura tensiune, in
schimb avand ambele sensuri de rotatie. Statorul (cu 2p=10) se
compune din patru piese
ambutisate prinse pe doua flanse formand cutia servomotorului.
Rotorul este format dintr-un magnet permanent ceramic, de asemenea avand un
camp coercitiv puternic.
Rotatia rotorului se obtine defazand curentul intr-una din cele doua bobine cu ajutorul unui condensator. Schimbarea sensului de rotatie se realizeaza prin permutare a tensiunii de alimentare pe una sau cealalta dintre bobine.
Principalele caracteristici ale acestui servomotor sunt:
tensiunea, 115W, 50Hz;
puterea absorbita, 4W;
curentul de mers in gol, 35mA;
curentul cu rotorul blocat, 40mA;
capacitatea
condensatorului, 0,4 μ F.
Caracteristicile sale mecanice sunt:
turatia, 600rot/min;
cuplul maxim, 35 .10-4 N· m
cuplul de desprindere, 60 10-4N m;
cuplul de prindere, 40 -4N m;
incalzirea, 55°C;
timpul necesar pentru atingerea turatiei de sincronism, 0,05s;
masa, 180g.
2.3Servomotoare sincrone speciale de tip histerezis
Se construiesc servomotoare tip histerezis, cu poli ecranati, de obicei cu un reductor mecanic avand un mare raport de demultiplicare, astfel incat turatia de iesire sa fie intre 60rot/min si 1rot/luna. Randamentul in acest caz este foarte scazut, insa aceasta este de minima importanta, deoarece puterea absorbita de servomotor este de 1,5 12W.
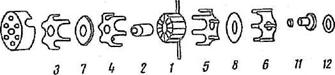
Fig. 3 Elementele unui motor cu histerezis multipolar, cu poli ecranati.
Un astfel de servomotor multipolar cu o singura bobina statorica este reprezentat in Fig. 3, unde 1 reprezinta unica bobina cilindrica a statorului, in mijlocul careia se monteaza miezul 2. Piesele prevazute cu gheare 4 si 5, montate la extremitatile acestui inel, formeaza 12 poli care sunt excitati de bobina statorica. Prin urmare, servomotorul are, la frecventa de 50Hz, turatia sincrona n1 = 60f/p = 500 rot/min. Piesele 3 si 6 sunt, de asemenea, montate pe inelul 1 cu cele doua bobine ecran 7 si 8, care le separa de piesele ce formeaza polii principaii. Se obtin astfel 12 piese polare, care reprezinta de fapt tot atatia poli ecranati. De exemplu, cele sase gheare ale piesei 4 corespund la sase poli aceeasi polaritate; ghearele piesei 5 corespund altor sase poli avand, de asemenea, aceeasi polaritate, insa acestia sunt ecranati de salba de cupru 7. Astfel, ansamblul de piese formeaza sase poli de aceeasi polaritate, fiecare avand o parte principala si una ecranata adica asa cum se intampla la veritabilii poli ecranati ai servomotoarelor asincrone. De asemenea, ansamblul 5-8-6 produce sase poli de polaritate opusa, care sunt la fel ecranati. Se obtin deci in total 12 poli ecranati. Ca element in care sa apara pierderile de histerezis este folosit inelul 9, fixat pe discul 10. Pentru rotor, se prevede un cuzinet autolubrifiant 11, asezat in miezul central 2 si capsulat cu inelul 12.
Firma Crouzet realizeaza o serie de servomotoare sincrone cu histerezis, dintre care tipul 82.381, ce poate fi alimentat la doua tensiuni 115/230V, 50Hz, este reprezentat in Fig. xxxxx.

Fig. 4. Motor sincron cu histerezis Crouzet tip 82.381.
Statorul acestui servomotor 2p = 10 este format din doua armaturi situate de o parte si de alta ale rotorului. Aceste armaturi metalice sunt prevazute cu dinti polari plasati alternativ sub influenta unui inel in scurtcircuit. Excitatia acestor armaturi este asigurata printr-o bobina unica, concentrica cu rotorul.
Rotorul este format dintr-un inel din aliaj magnetic, cu camp coercitiv slab. Bobina cuprinde doua infasurariri pentru cele doua tensiuni de alimentare. Reductorul are o rezistenta mecanica de 1,2-10-2 N-m si masa de 150g. Turatia la iesirea reductorului este intre 1/6 si 10 rot/min.
Tab. 2. Caracteristicile servomotorului sincron cu histerezis reprezentat in Fig 4
|
Caracteristicile |
115 V |
230 V |
|
Curentul absorbit, mA: la gol | ||
|
cu rotor blocat | ||
|
Incalzirea, °C in gol | ||
|
cu rotor blocat | ||
|
Turatia, rot/min | ||
|
Puterea absorbita, W | ||
|
Temperatura ambianta, °C minima | ||
|
maxima |
3 Servomotoare liniare sincrone cu magneti permanenti
Generalitati
Desi, din punct de vedere istoric, motorul electric liniar a aparut destul de apropiat in timp (primul motor electric liniar a fost construit de Wheatstone in perioada 1841-1845), fata de cel rotativ (prima masina electrica rotativa a fost construita de Faraday in anul 1831), dezvoltarea ulterioara a celor doua tipuri constructive de servomotoare electrice avea sa se faca in mod diferit.
Astfel, daca motorul electric rotativ a devenit ceva uzual, fara de care nu s-ar mai putea concepe derularea vietii si a activitatii moderne contemporane, motorul electric liniar si-a legat evolutia de anumite aplicatii concrete, unde a reprezentat sau poate reprezenta, in prezent si in viitor, o solutie avantajoasa din punct de vedere tehnic si economic.
Cea mai importanta posibila aplicatie a motoarelor electrice liniare a fost considerata o buna perioada de timp, transportul feroviar electric. Astfel, in perioada 1960-1975, aproape toate marile laboratoare de cercetari ale universitatilor si firmelor constructoare din tarile dezvoltate au creat modele teoretice, modele fizice, prototipuri si chiar dezvoltari industriale de motoare electrice liniare mari cu aplicatii in transportul electric.
Aproape toate proiectele mari de realizare a unor retele de cale ferata si metrouri bazate pe tractiunea cu motor electric liniar au fost abandonate din ratiuni economice, proiectele necesitand un volum foarte mare de investitii. In momentui de fata, cu toate ca mai sunt proiecte mari din domeniul transportului feroviar electric care propun ca solutie motorul electric liniar (de exemplu, proiectul Swiss Metro), cele mai multe dezvoltari teoretice si experimentale privind aplicatii ale servomotoarelor electrice liniare se refera la domeniile: masini-unelte, echipamente tehnologice, instalatii de masura inregistratoare etc.
Se observa o concentrare a interesului pentru servomotoarele electrice liniare avand o lungime mica a cursei.
Avantajele utilizarii servomotoarelor electrice liniare sunt legate de doua - aspecte pe care acestea le prezinta, si anume sunt masini de actionare directa si servomotoare deschise.
Primul aspect, acela ca sunt servomotoare de actionare directa, prezinta avantajul eliminarii tuturor transmisiilor mecanice intermediare de la servomotorul rotativ pana la sarcina mecanica in miscare de translatie. Servomotorul electric liniar actioneaza direct asupra sarcinii mecanice careia trebuie sa-i imprime o miscare de translatie
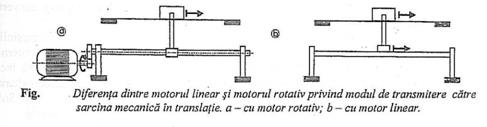
In Fig 1 este redata schematic aceasta situatie.
Eliminarea acestor transmisii mecanice inseamna reducerea masei si a volumuiui echipamentului, reducerea pierderilor, deci imbunatatirea randamentului global al echipamentului si reducerea nivelelor de erori in transmiterea miscarii.
Al doilea aspect, acela ca servomotoarele electrice liniare sunt niste masini deschise, implica doua tipuri de avantaje, ambele legate de posibilitatile de racire.
Fiind masini deschise, ele prezinta un mai bun contact cu aerul si cu elemente mecanice exterioare, astfel ca servomotoarele electrice liniare au conditii de racire mai bune decat cele rotative, in mod natural.
Daca, totusi din motive de respectare a unor gabarite impuse, se pune problema obtinerii unor forte superioare in acelasi volum, atunci, tot datorita acestui aspect de servomotoare deschise, se poate practica fara complicatie racirea cu apa a armaturii fixe.
Aceste elemente conduc la concluzia ca, in cazul servomotoarelor electrice liniare, se poate merge cu o densitate de curent superioara in infasurari fata de cele electrice rotative.
Pentru a putea explica dezavantajele servomotoareior liniare este nevoie sa anticipam putin anumite elemente legate de constructia servomotoarelor electrice liniare, si anume, orice servomotor electric liniar este compus din doua armaturi, una mai lunga, denumita uzual si rigla, si cealalta mai scurta, denumita uzual si cursor. De obicei, armatura mai lunga, rigla, este fixa, iar armatura scurta, cursorul, este mobila.
Principalul dezavantaj al servomotoarelor electrice liniare este acela ca, la dezvoltarea instantanee a fortei, participa numai partea pe care cele doua armaturi, rigla si cursorul, se afla fata in fata, restul constructiei riglei nu participa la dezvoltarea de forta.
Aceasta inseamna ca nu toate materialele inglobate in constructia partii active a servomotoarelor electrice liniare participa la dezvoltarea fortei. Deci, se poate concluziona ca, din punct de vedere economic, un servomotor electric liniar este cu atat mai eficient, cu cat raportul dintre lungimea riglei si lungimea cursorului are valoarea mai mica, deci cu cat lungimea cursei este mai mica. Prin cursa, se intelege lungimea spatiului parcurs de cursor.
Un alt dezavantaj il reprezinta, prin comparatie cu servomotoarele rotative, faptul ca, la cele electrice liniare, pentru mentinerea valorii constante a intrefierului, se construiesc ghidaje pe toata lungimea riglei. Acestea reprezinta niste constructii mai scumpe decat rulmentii utilizati la servomotoarele electrice rotative.
In multe cazuri cand servomotoarele electrice liniare nu sunt construite ca elemente de sine statatoare, ci sunt gandite de la inceput pentru aplicatiile respective, mentinerea constanta a distantei dintre rigla si cursor, deci formarea intrefierului, se realizeaza direct prin ghidajele pe care se deplaseaza sarcina mecanica pe care servomotorul trebuie sa o actioneze.
Deci, in acest caz, se poate spune ca servomotorul electric linear se grefeaza pe sarcina mecanica si, din punct de vedere al acestui dezavantaj, servomotorul este cu atat mai economic, cu cat lungimea cursei este mai mica.
BIBLOGRAFIE
1) "MICROMASINI ELECTRICE SINCRONE SI DE CURENT CONTINUU"
Autor : Carmen COJOCARU - FILIPIUC
EDITURA "GH. ASACHI" - IASI 2001
2) " SERVOMOTOARE ELECTRICE - teorie, calcul, aplicatii
Autori : Nicolae VASILE, Sigismund SLAIHER
EDITURA "ELECTRA" - BUCURESTI 2002
3)" TRANSFORMATOARE SI MASINI ELECTRICE
Autori : A. CRETU , A. PRISACARU, C. COJOCARU - FILIPIUC
EDITURA " GH. ASACHI " - IASI 2000
4) " MANAGEMENT GENERAL
Autori: GH. CONDURACHE, M. VOICU, C. HUTU
EDITURA " DACIA" - CLUJ - NAPOCA 2000
5) " ABC -UL MANAGERULUI " PG 55-65
Autori : C . RUSU , M.VOICU
EDITURA " GH. ASACHI "-IASI I995
6)"Management aplicat 1 - Managementul valorii produsului" -101-103
Autori : CONDURACHE GH.
Editura "Gh. Asachi "- IASI
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |