COMPONENTELE VITEZEI SI ACCELERATIEI IN DIFERITE SISTEME DE REFERINTA
1. Componentele vitezei si ale acceleratiei in sistemul de coordonate carteziene.
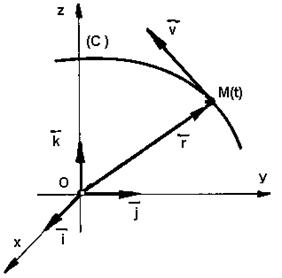
In sistemul de referinta cartezian, vectorul de pozitie are expresia sa analitica:
![]()
|
|
Prin derivare, se obtine expresia vitezei:
![]() (11)
(11)
deoarece in sistemul cartezian, considerat fix,
derivatele versorilor axelor sistemului de axe sunt nule (![]() ).
).
Vectorul viteza are expresia analitica, in functie de proiectiile sale pe axe carteziene, de forma:
![]() (12)
(12)
Comparand cele doua forme (11) si (12), rezulta:
 (13)
(13)
care reprezinta proiectiile vectorului viteza pe cele trei axe ale sistemului de coordonate.
Modulul vitezei devine:
![]() (14)
(14)
Directia sa se obtine cu ajutorul cosinusilor directori:
 (15)
(15)
Pentru obtinerea componentelor acceleratiei si deci a expresiei analitice a vectorului acceleratie in sistemul cartezian, se va deriva in raport timpul vectorul viteza din expresia (11), obtinandu-se:
![]() (16)
(16)
Dar si vectorul acceleratie poate avea o expresie analitica in acelasi sistem de referinta:
![]() (17)
(17)
Prin comparare, se obtin:
 (18)
(18)
relatii care reprezinta proiectiile vectorului acceleratie pe axele acestui sistem de referinta. Asa ca marimea si directia acceleratiei sunt date de relatiile:
![]() (19)
(19)
 (20)
(20)
Dupa cum se observa, pentru obtinerea vitezei si acceleratiei in coordonatele carteziene sunt necesare 6 operatii de derivare in raport cu timpul, iar pentru obtinerea directiilor acestor vectori trebuie gasiti cosinusii lor directori, asa ca sub aspect al volumului de calcul, acest sistem de referinta nu este prea comod si in plus nu exploateaza informatia, deosebit de utila in practica, conform careia viteza este tangenta la traiectorie. De aceea, acest sistem de referinta se va utiliza numai in cazul in care functiile x(t), z(t), z(t) au expresii relativ simple, usor de derivat.
2. Componentele vitezei si ale acceleratiei in sistemul de coordonate polare
In coordonate polare, fig.5, pozitia punctului material este data de ecuatiile:
|
|
 (21)
(21)
iar vectorul de pozitie al unui punct de pe traiectoria sa este:
![]() (22)
(22)
in care ![]() si
si ![]() reprezinta versorii celor doua directii:
radiala si transversala a sistemului polar, care fata
de sistemul cartezian de referinta au expresiile:
reprezinta versorii celor doua directii:
radiala si transversala a sistemului polar, care fata
de sistemul cartezian de referinta au expresiile:
 (23)
(23)
Derivatele acestora in raport cu timpul devin:
 (24)
(24)
deoarece versorii ![]() si
si ![]() sunt constanti ca
marime si directie, iar
sunt constanti ca
marime si directie, iar ![]() si
si ![]() sunt constanti ca
marime dar nu si ca directie.
sunt constanti ca
marime dar nu si ca directie.
Vectorul viteza se obtine prin derivarea vectorului de pozitie:
![]() (25)
(25)
Expresia analitica a vectorului viteza in coordonatele polare,
![]() (26)
(26)
Comparand relatiile (25) si (26), conduc la proiectiile vitezei in sistemul de coordonate polare:
 (27)
(27)
Factorul ![]() poarta numele de
viteza unghiulara a punctului material la momentul t si se
masoara in rad/s.
poarta numele de
viteza unghiulara a punctului material la momentul t si se
masoara in rad/s.
In mod obisnuit se noteaza cu litera
greceasca ![]()
Modulul vectorului viteza devine:
![]() (28)
(28)
Vectorul acceleratie se obtine prin derivarea vectorului viteza, obtinut in expresia (25), astfel:
 (29)
(29)
Comparand (29) cu expresia analitica a vectorului acceleratie in sistem de coordonate polare de forma:
![]() ,
,
obtinem componentele acceleratiei in acest sistem de referinta de forma:
 (31)
(31)
Modulul acceleratiei in sistemul de coordonate polare, devine:
![]() (32)
(32)
Factorul ![]() care intervine in
aceste expresii, poarta numele de acceleratie unghiulara la
momentul oarecare t si se masoara in rad/s2 sau s-2
si in mod obisnuit se noteaza cu litera greceasca
care intervine in
aceste expresii, poarta numele de acceleratie unghiulara la
momentul oarecare t si se masoara in rad/s2 sau s-2
si in mod obisnuit se noteaza cu litera greceasca ![]()
![]() (33)
(33)
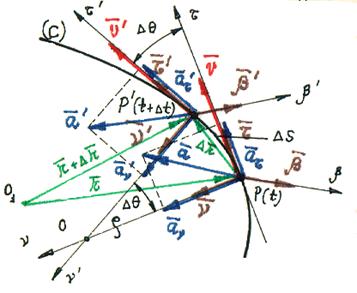
3. Componentele vitezei si ale acceleratiei in coordonate intrinseci (triedrul lui Frenet)
Intrucat viteza are directia tangenta la
traiectorie in orice moment, este mai usor de studiat miscarea
punctului fata de un sistem de referinta mobil, cu originea
chiar in punctul material M aflat in miscare. Acest sistem are axele:
tangenta la traiectorie cu versorul sau ![]() normala
principala ce trece prin centrul de curbura a traiectoriei C, cu
versorul sau
normala
principala ce trece prin centrul de curbura a traiectoriei C, cu
versorul sau ![]() si care
impreuna cu tangenta formeaza planul osculator, iar cea de a treia
axa este binormala cu versorul
si care
impreuna cu tangenta formeaza planul osculator, iar cea de a treia
axa este binormala cu versorul ![]() perpendiculara pe
planul osculator si cu sensul astfel incat ca sa formeze un triedru
triortogonal drept impreuna cu celelalte doua axe (tangenta si
normala) in ordinea
perpendiculara pe
planul osculator si cu sensul astfel incat ca sa formeze un triedru
triortogonal drept impreuna cu celelalte doua axe (tangenta si
normala) in ordinea ![]()
Se cunosc din geometria diferentiala relatiile:
 (34)
(34)
denumite si formulele lui Frenet, in care ![]() este raza de
curbura a traiectoriei in pozitia M, iar
este raza de
curbura a traiectoriei in pozitia M, iar ![]() raza de torsiune a
acesteia in aceasta pozitie.
raza de torsiune a
acesteia in aceasta pozitie.
Prin comparatia relatiei de
definitie a vectorului viteza (8), adica ![]() cu expresia
analitica a vectorului viteza in sistemul de referinta
intrinsec,data de relatia:
cu expresia
analitica a vectorului viteza in sistemul de referinta
intrinsec,data de relatia:
![]() (35)
(35)
rezulta:
 (36)
(36)
Se constata ca vectorul viteza are o singura componenta in acest sistem de referinta, tangenta la traiectorie, avand modulul egal cu derivata in raport cu timpul al spatiului curbiliniu s(t).
Vectorul acceleratie se va gasi derivand in raport cu timpul vectorul viteza din expresia vectoriala (8):
![]()
Derivata lui ![]() in raport cu timpul se determina din prima formula
a lui Frenet (34), inmultind-o cu ds/ds T
in raport cu timpul se determina din prima formula
a lui Frenet (34), inmultind-o cu ds/ds T
 (37)
(37)
deci:
 (38)
(38)
S-a obtinut expresia analitica a vectorului acceleratie in sistemul de referinta intrinsec. Comparand expresia (38) cu expresia analitica a unui vector de proiectii necunoscute pe axele triedrului lui Frenet, care pentru vectorul acceleratie este de forma:
![]() (39)
(39)
se obtin:
 (40)
(40)
|
|
Rezulta ca, vectorul acceleratie
este continut in planul osculator, adica in triedul lui Frenet, are
doar doua componente diferite de zero si anume: componenta
tangentiala ![]() care masoara variatia in timp a marimii
vectorului viteza a punctului si componenta normala
care masoara variatia in timp a marimii
vectorului viteza a punctului si componenta normala ![]() dirijata
dupa normala principala si intotdeauna cu sensul spre centrul de
curbura C (fig.6), care masoara variatia in timp a
directiei vectorului viteza a punctului material.
dirijata
dupa normala principala si intotdeauna cu sensul spre centrul de
curbura C (fig.6), care masoara variatia in timp a
directiei vectorului viteza a punctului material.
Se observa ca daca traiectoria este
rectilinie ![]() atunci
atunci ![]() si deci viteza
nu-si schimba directia.
si deci viteza
nu-si schimba directia.
In concluzie, in triedrul lui
Frenet, marimile vitezei si acceleratiei sunt:
 (41)
(41)
Se observa ca sunt necesare doar trei
marimi fizice pentru cunoasterea vitezei si acceleratiei
punctului la un moment dat t, constand din derivata de ordinul unu in raport cu
timpul a spatiului curbiliniu ![]() derivata de ordinul
doi in raport cu timpul a spatiului curbiliniu
derivata de ordinul
doi in raport cu timpul a spatiului curbiliniu ![]() si raza de
curbura
si raza de
curbura ![]() fata de cele
sase marimi fizice necesare in sistemul cartezian de
referinta, ceea ce constituie un avantaj evident pentru tratarea
problemelor de cinematica punctului material. Cu toate acestea, determinarea
razei de curbura intr-un moment dat t prezinta uneori
dificultati deosebit de mari, ceea ce face ca sa se
restranga si universalitatea utilizarii cu precadere a
acestui sistem de referinta.
fata de cele
sase marimi fizice necesare in sistemul cartezian de
referinta, ceea ce constituie un avantaj evident pentru tratarea
problemelor de cinematica punctului material. Cu toate acestea, determinarea
razei de curbura intr-un moment dat t prezinta uneori
dificultati deosebit de mari, ceea ce face ca sa se
restranga si universalitatea utilizarii cu precadere a
acestui sistem de referinta.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |