
Tehnicile evolutioniste si in special algoritmii genetici permit sinergismul natural cu celelalte tehnici inteligente. Ele sunt usor de aplicat, nu cer un aparat matematic complex, pot rezolva probleme "tari", care includ puternice neliniaritati, multivariabilitate, discretizare, perturbatii si zgomote si sunt usor de extins prin noi scheme dependente de imaginatia utilizatorului. Folosirea lor are insa si unele limite, legate in primul rand de lipsa garantiei gasirii optimului global. Aceasta incertitudine este generata pe de-o parte de limitele de precizie in codificarea procesului, determinata de alegerea lungimii sirurilor binare ale populatiei de solutii, iar pe de alta, de convergeta prea rapida a intregii populatii spre un optim neglobal, atunci cand exista extreme locale. In aceste situatii, populatiei finale a solutiilor i se poate aplica o rutina numerica de cautare fina locala.
Gama problemelor rezolvate pana acum cu ajutorul GA este destul de larga: rezolvarea problemelor de transport, liniare sau neliniare; cautarea optimului multicriterial; trasarea grafurilor orientate; proiectarea retelelor de fibre optice; instruirea masinilor; identificarea si controlul proceselor; proiectarea retelelor neurale; rezolvarea problemelor de conducere optimala; interpretarea imaginilor sintetice; compozitii muzicale asistate de calculator; solutionarea unor probleme economice de management, etc.
Pentru identificarea dinamica off-line, se porneste de la descrierea matematica a procesului:
A (q-1 ) y(t) = q-k B(q-1) u(t) + C(q-1 ) e(t)
unde u(t), y(t) sunt intrarea, respectiv iesirea procesului la momentul t, q-1 este operatorul de intarziere, e(t) este zgomotul alb, A(q-1) = 1+a1q-1 +..+ anaq-na,
B(q-1) = b0+b1q-1+.+bnbq-nb, C(q-1) = 1+c1q-1+.+cncq-nc. Diferitele tehnici de identificare urmaresc gasirea unor modele de forma:
A'(q-1)y(t) = q-kB'(q-1) u(t) + H' (q-1)e'(t) (3.115)
unde e'(t) se numeste reziduul modelului.
Polinoamele H', A', B' (care sunt definite analog cu
C, A, B) pot avea diferite forme, in
functie de metoda de identificare aleasa. Coeficientii
polinomiali necunoscuti ai modelului sunt grupati intr-un vector p al parametrilor. Metoda minimului
patratic (MP) considera H'(q-1)
= 1 iar coeficientii polinomiali (a'i,
b'j) se determina minimizand expresia ![]() , unde m = max. (na, nb
+k) iar N - numarul de
perioade de esantionare. Metoda maximului (MM) considera H'(q-1) = C'(q-1)
si vectorul parametrilor p este
determinat prin minimizarea expresiei:
, unde m = max. (na, nb
+k) iar N - numarul de
perioade de esantionare. Metoda maximului (MM) considera H'(q-1) = C'(q-1)
si vectorul parametrilor p este
determinat prin minimizarea expresiei: ![]() .
.
Datorita faptului ca dependenta fata de parametrii C'j este puternic neliniara, minimizarea analitica a lui VMM nu este posibila, iar minimizarea numerica prin metoda Newton-Raphson impune un algoritm complex si lent. In acest context se recomanda folosirea GA pentru minimizarea lui VMM(p), utilizand datele de intrare-iesire ale sistemului. Principalele probleme care apar se refera la metoda de codificare, modalitatea de generare a populatiei initiale de solutii si definirea operatorilor genetici.
Un obiectiv nevralgic in analiza si proiectarea sistemelor automate de reglare il constituie stabilitatea. Analiza robusta a sistemelor liniare consta in examinarea polinomului caracteristic in prezenta unor parametri necunoscuti. Considerand sistemul descris in spatiul starilor prin x' (t) = A(q) x(t), unde q este vectorul parametrilor necunoscuti, polinomul caracteristic va fi:
P (s, q) = det. [sI - A(q)] = ![]() (3.116)
(3.116)
Sistemul va fi robust stabil daca radacinile lui P(s, q) au Re(s)<0, iar pentru cautarea acestora poate fi utilizata o schema de optimizare bazata pe un GA.
Au fost prezentate studii comparative care demonstreaza avantajele folosirii algoritmilor genetici si in probleme de reglare optimala discreta cu modelele patratice, concluziile indicand o buna competitivitate cu tehnicile conventionale.
Pentru sistemele reale complexe care dispun de anumite forme de autonomie, sau pentru cele sunt caracterizate prin modele matematice vagi, nivel de zgomot ridicat, neliniaritati, obiectivul conventional al reglarii - obtinerea unui regulator cu parametri fixati de catre proiectant - nu mai este intru-totul adecvat. Inlocuirea in aceste cazuri a regulatoarelor clasice cu sisteme de control inteligent avand comportament adaptiv sau predictiv la dinamica mediului de lucru s-a dovedit benefica. De multe ori, datorita complexitatii raspunsurilor impuse si varietatii incertitudinilor, utilizarea in implementarea schemelor de control a unei singure tehnici de inteligenta artificiala este insuficienta. Vom face acum cateva consideratii privind modul in care algoritmii genetici isi pot impleti abilitatile cu cele ale retelelor neurale sau ale logicii fuzzy, urmand ca in capitolul urmator sa detaliem particularitatile sistemelor inteligente hibride.
Retelele neurale evolutioniste reprezinta un mijloc prin care o ANN se dezvolta utilizand tehnici de calcul bazate pe GA. Algoritmii genetici pot realiza astfel instruirea unui neurocontroler destinat reglarii proceselor complexe. Ei vor permite definirea evolutiei ponderilor intre neuronii artificiali, perfectionarea topologiei retelei si modificarea semnalelor de instruire. Pana acum rezultatele obtinute prin cercetari indreptate spre primele doua directii arata ca inlocuirea algoritmului de invatare BP cu un GA nu este competitiva decat atunci cand se utilizeaza criterii de optim discontinue. Folosirea GA este insa benefica pentru ajustarea adaptiva a parametrilor algoritmilor de instruire.
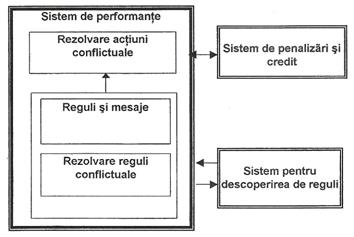
Figura III.26. Structura unui sistem de consolidare a cunostintelor cu algoritm genetic
Sunt deja cunoscute avantajele controlerelor fuzzy implementate intr-un singur circuit integrat, usor de interfatat cu senzori si elemente de executie. O problema dificila, pentru care nu exista inca tehnici total adecvate, o reprezinta insa calibrarea acestora. De aceea, o prima aplicatie care intrepatrunde logica fuzzy si GA se refera la acordul fin al controlerelor fuzzy utilizand algoritmi genetici. Se uzeaza de o reprezentare a cunostintelor pe trei nivele: reguli simbolice, ponderi numerice si definitii lingvistice fuzzy. GA sunt utilizati pentru extragerea cunostintelor necesare si punerea lor de acord cu cele inglobate in controler. Modificarile obtinute simplifica structura simbolica a controlerului fuzzy.
Sistemele de clasificare care utilizeaza GA sunt denumite si sisteme de consolidare a cunostintelor (CCS). Un CCS este o masina care invata nesupervizat, pe baza unui minim de cunostinte initiale, iar informatia din mediul inconjurator este primita sub forma de "stimulente" si "penalitati" (numere pozitive, respectiv negative). Conform schemei din Figura III.26, un algoritm genetic este utilizat ca furnizor de reguli noi in sistem. El lucreaza in legatura cu algoritmul de consolidare (cel care stimuleaza sau penalizeaza) astfel incat impreuna pot valida regulile bune si elimina pe cele slabe.
Un caz particular al CSS il reprezinta masina de invatare genetica (GBML - genetics-base machine learning), care are o structura similara cu CCS, dar contine un subsistem de prelucrare paralela a regulilor, aflat in permanenta interactiune cu mediul. Se utilizeaza doi algoritmi genetici: unul pentru cautarea si recombinarea regulilor si altul pentru consolidarea acestora.
Robotul autonom este o aplicatie a masinii de invatare genetica care rezolva probleme de animatie, adica gaseste proceduri prin care sa supravietuiasca intr-un mediu anume, intocmai ca un un animal viu. Problema este dificila datorita lipsei cunostintelor apriorice legate de situatiile de impact cu mediul si inexistentei unui "instructor" care sa dea indicii de evolutie pentru a impiedice actiunile eronate. Calculului evolutionist poate rezolva complexa problema a robotului autonom, obtinandu-se rezultate mai bune decat cu sistemele traditionale de achizitie a cunostintelor, ceea ce demonstreaza ca este un bun suport pentru invatarea adaptiva, avand abilitatea de a interactiona cu un mediu inconjurator in schimbare dinamica nepredictiva. In robotica mai pot fi intalnite si alte aplicatii ale GA, atat in constructia controlerelor, cat si pentru gasirea celor mai robuste metode adaptive de conducere in medii industriale reale.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |