
Particularitati ale sistemelor de reglare tinand seama de parametrii reglati
1. Reglari de debite
Caracteristicile principale ale reglarilor de debite sunt indicate in cele ce urmeaza.
- Reglarile de debite constituie deseori bucle de reglare secundare in care marimea de intrare se modifica pentru a realiza o anumita balanta de material sau pentru a se regla calitatea produsului. In asemenea cazuri nu sunt cerinte pretentioase in ceea ce priveste precizia masurarilor de debite, in afara situatiilor cand asemenea masuri servesc si pentru decontari sau cand sunt legate si de conditiile de siguranta in functionarea utilajului, situatie care se intalneste la unele reactoare.
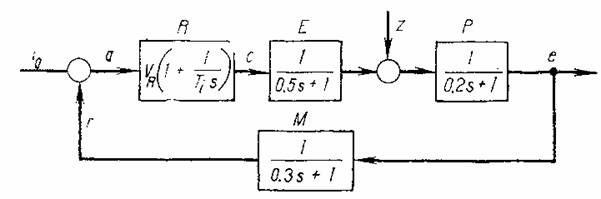
- Constantele de timp ale procesului sunt neglijabile. Ele se situeaza aproximativ in domeniul de 0,53s. Aceasta inseamna ca daca ventilul de reglare trece pe o noua pozitie, debitul final corespunzator se obtine intr-un timp foarte scurt. Raspunsul tranzitoriu al sistemului de reglare depinde in primul rand de celelalte elemente componente ale sistemului de reglare, adica de constantele de timp ale elementului de masurare, regulator, ventilul de reglare si, in cazul elementelor pneumatice, de lungimea conductelor pneumatice de legatura. In cazurile obisnuite, regimul tranzitoriu in reglarile de debit are o durata mai mica de 1 min. Daca se utilizeaza un sistem de reglare electronic, pentru a se elimina constantele de timp ale liniilor de legatura pneumatice lungi, sau din alte considerente si se aleg elementele componente cu constante de timp mici, durata acestui regim tranzitoriu poate fi si mai redusa. Daca reglarile de debit se refera la procese care au loc in conducte de gaz si de lichid lungi, apar fenomene de comprimare si expansiune. In asemenea cazuri este de asteptat ca ponderea constantelor de timp ale procesului sa fie mare. In fig. 1 este prezentata schema-bloc a unei reglari de debit cu constantele de timp, in secunde, care se intalnesc uzual in asemenea reglari.
 - Semnalul de iesire din proces are un
raport zgomot/semnal mare, adica debitul are fluctuatii cu o
frecventa mai mare decat aproximativ 0,5 Hz. Din cauza ca unele
elemente de masurare pentru debite au o amortizare mare, asemenea zgomote
nu influenteaza desfasurarea procesului. Unele zgomote constituie de fapt
variatii de debit care provin de la pompa sau compresor,
variatii intamplatoare prin ventil sau diafragma si care
sunt prea rapide pentru a fi corectate printr-un sistem de reglare.
Totusi, cu unele elemente de masurare, asemenea zgomote pot ajunge la
regulator si la inregistrator. Inregistrarile pentru oscilatii
rapide aproape se suprapun si deci valorile reale ale debitului sunt
dificil de citit
- Semnalul de iesire din proces are un
raport zgomot/semnal mare, adica debitul are fluctuatii cu o
frecventa mai mare decat aproximativ 0,5 Hz. Din cauza ca unele
elemente de masurare pentru debite au o amortizare mare, asemenea zgomote
nu influenteaza desfasurarea procesului. Unele zgomote constituie de fapt
variatii de debit care provin de la pompa sau compresor,
variatii intamplatoare prin ventil sau diafragma si care
sunt prea rapide pentru a fi corectate printr-un sistem de reglare.
Totusi, cu unele elemente de masurare, asemenea zgomote pot ajunge la
regulator si la inregistrator. Inregistrarile pentru oscilatii
rapide aproape se suprapun si deci valorile reale ale debitului sunt
dificil de citit
- Un regulator PID, adica un regulator care are si efect D, nu este de obicei indicat in reglarile de debit, deoarece acest efect amplifica zgomotele. In regulatoarele PID exista aproape intotdeauna un efect D rezidual si, din aceasta cauza, se construiesc regulatoare speciale pentru debite care sunt numai de tipul PI. Valorile pentru VR si Ti sunt mai mici decat in reglarile celorlalti parametri.
In cele ce urmeaza se examineaza mai amanuntit caracteristicile reglarilor de debit.
1.1. Constantele de timp in masurarile de debit
In mod frecvent debitul se
masoara utilizand caderea de presiune Dp pe o diafragma. In cazul gazelor debitul
Q este dat de o relatie avand forma ![]() , in care K depinde de temperatura si presiunea
gazului. Corectia lui K pentru a se tine seama de
variatia acestor parametri, se justifica in putine cazuri, din
cauza complicatiilor introduse si a cresterii costului, astfel
incat trebuie prevazuta numai cand se obtin
imbunatatiri certe ale performantelor reglarii. In instalatiile
din ultimul timp elementul de masurare, adica
transmitatorul de presiune diferential, este bazat pe echilibrul
de forte care transforma presiunea diferentiala produsa de
diafragma intr-un semnal unificat pneumatic sau electric. Raspunsul
unui asemenea element este foarte rapid, deoarece volumul fluidului din
transmitator este mic. Transmitatoarele electronice au o
constanta de timp in jur de 0,2 s, valorile ceva mai mari fiind admise
pentru a se obtine o amortizare mai mare. In ceea ce priveste
transmitatoarele pneumatice, raspunsul lor depinde si de
lungimea si diametrul conductei pneumatice, constantele de timp ale
liniilor cu lungimea de 150200 m putand fi de 36 s. Cu conducte scurte,
pana la aproximativ 50 m este dominanta constanta de timp a
elementului de masurare; pentru conducte mai lungi, devine dominanta
constanta de timp a liniei de transmisie. In asemenea situatii (conducte
pneumatice lungi) constanta de timp redusa a elementului de masurare
bazat pe balanta de forte nu este intrebuintata cu folos si
este indicat sa se utilizeze un element de masurare si
regulatoare electronice.
, in care K depinde de temperatura si presiunea
gazului. Corectia lui K pentru a se tine seama de
variatia acestor parametri, se justifica in putine cazuri, din
cauza complicatiilor introduse si a cresterii costului, astfel
incat trebuie prevazuta numai cand se obtin
imbunatatiri certe ale performantelor reglarii. In instalatiile
din ultimul timp elementul de masurare, adica
transmitatorul de presiune diferential, este bazat pe echilibrul
de forte care transforma presiunea diferentiala produsa de
diafragma intr-un semnal unificat pneumatic sau electric. Raspunsul
unui asemenea element este foarte rapid, deoarece volumul fluidului din
transmitator este mic. Transmitatoarele electronice au o
constanta de timp in jur de 0,2 s, valorile ceva mai mari fiind admise
pentru a se obtine o amortizare mai mare. In ceea ce priveste
transmitatoarele pneumatice, raspunsul lor depinde si de
lungimea si diametrul conductei pneumatice, constantele de timp ale
liniilor cu lungimea de 150200 m putand fi de 36 s. Cu conducte scurte,
pana la aproximativ 50 m este dominanta constanta de timp a
elementului de masurare; pentru conducte mai lungi, devine dominanta
constanta de timp a liniei de transmisie. In asemenea situatii (conducte
pneumatice lungi) constanta de timp redusa a elementului de masurare
bazat pe balanta de forte nu este intrebuintata cu folos si
este indicat sa se utilizeze un element de masurare si
regulatoare electronice.
Importanta constantelor de timp ale liniilor de transmisie in reglarile de debit este o consecinta a faptului ca elementul de masurare si procesul au constante de timp foarte mici.
In cazul utilizarii diafragmei semnalul de iesire din transmitator este proportional cu Dh si deci cu patratul debitului. Daca variatiile de debit sunt mari, va fi necesara liniarizarea masurarii prin introducerea unui element de extragere a radacinii.
1.2. Sisteme simple de reglare a debitului
In unele situatii este necesar sa se asigure un debit anumit intre o sursa de presiune si o alta si diferenta de presiune intre recipientele respective este suficienta pentru a asigura debitul respectiv nefiind deci necesara o pompa (fig. 2). Exemple de acest fel sunt: debitele din rezervoare principale, debitele de reflux din condensatoare in coloanele de distilare. Perturbatiile care trebuie compensate de sistemul de reglare sunt variatiile in valoarea presiunilor P1 si P2. Cu cat diferenta P1-P2 este mai mare, cu atat sistemul de reglare este mai usor de realizat si performantele sunt mai bune. In ceea ce priveste ventilul de reglare este posibil sa se aleaga o asemenea caracteristica intrinseca incat coeficientul de amplificare al sistemului de regim stationar, adica VR KE KP KM ,sa ramana practic constant oricare ar fi debitul. Aceasta elimina necesitatea modificarii lui VR si Ti atunci cand sunt de asteptat modificari importante in conditiile de desfasurare a procesului daca s-ar schimba, de exemplu, marimea de referinta. Ramane totusi de examinat, in cazul cand modificarile de debit se pot intinde pe un domeniu larg, necesitatea liniarizarii masurarii debitului.
Daca procesul are o constanta de timp neglijabila, astfel cum este situatia in mod normal, alegerea caracteristicii ventilului depinde de elementul de masurare. In tabelul 1 sunt prezentate caracteristicile ventilului pentru a indeplini conditia de mai sus in cazul sistemului de reglare din figura 2. In tabel s-a notat cu X deplasarea tijei ventilului si cu Q debitul prin ventil.
|
Elementul de masurare |
Caracteristica ventilului |
Caracteristica intrinseca a ventilului |
|
|
Caderea de presiune pe conducta |
|||
|
Neglijabila |
Importanta |
||
|
Diafragma (neliniarizat) |
|
Echiprocentuala |
Liniara |
|
Liniar |
|
Liniara |
Echiprocentuala |
Deseori, debitul dat de o
pompa centrifuga sau un ventilator este reglat cu ajutorul unui
ventil (fig. 3). Din cauza caracteristicilor specifice ale pompei, este
dificila stabilirea unor recomandari generale pentru alegerea caracteristicii
intrinseci a ventilului. In numeroase cazuri s-a constatat, de altfel, ca
nu s-a obtinut o caracteristica de functionare dorita cu
nici una dintre caracteristicile intrinseci uzuale (liniara sau
echiprocentuala). De obicei, ventilele cu caracteristica
echiprocentuala dau si in acest caz rezultatele cele mai bune Atat la
masurarea prin diafragma cat si cu un element de masurare
liniar. Oricum, se obtin rezultate cu atat mai bune cu cat caderea de
presiune P2 - P1 este mai mare. Perturbatiile
provin din variatia presiunilor P2 si P4.
In practica, de altfel, nici un ventil nu are o caracteristica intrinseca strict necesara pentru a mentine constanta amplificarea sistemului de reglare in regim stationar pentru orice debit. Daca variatiile de debit sunt mai mari decat de exemplu, de la simplu la dublu, atunci la masurarea prin diafragma este necesar sa se introduca un element pentru extragerea radacinii patrate pentru a obtine un semnal proportional cu debitul. Bineinteles, asemenea neliniaritati nu apar daca masurarea se face cu un element liniar.
S-au realizat sisteme de reglare pentru debite utilizandu-se ventile in conducte by-pass. In cele ce urmeaza se vor prezenta concluziile analizei acestor sisteme de reglare, care conduc la nerecomandarea unor reglari intalnite in practica.
De obicei, nu se obtine
nici un avantaj cu reglarea de debit conform figurii 4 in care un ventil
inchide si celalalt deschide. Este mai indicat sa se
introduca pe by-pass un ventil cu comanda manuala si deci
regulatorul de debit sa comande ventilul al doilea. Obtinerea unei
reglari satisfacatoare este usurata de o cadere
mare de presiune P2-P4.
Schema de reglare dubla
din figura 5 este inerent nesatisfacatoare. Nu se poate obtine o
reglare satisfacatoare pentru presiune si debit in acelasi
punct. Regulatorul de presiune trebuie acordat sa intervina foarte
lent, pentru a nu influenta reglarea debitului, si in felul acesta
reglarea presiunii devine inutila, deoarece sistemul de reglare a
debitului, care este un sistem rapid, poate singur sa asigure reglarea
debitului fata de perturbatii rapide de presiune pe care,
oricum, regulatorul de presiune nu le poate compensa in timp util.
In figura 6 se prezinta
schema unei reglari de presiune in serie cu o reglare de debit, care, de
asemenea, nu se recomanda. Reglarea debitului intr-o asemenea
structura va avea rezultate mai proaste in general decat daca
reglarea debitului ar fi singura, adica daca ar lipsi reglarea
de presiune in amonte.
3. Caracteristicile si acordul regulatorului in reglarile de debite
Problema zgomotelor prezinta o importanta deosebita in reglarile de debit pentru ca in desfasurarea unui asemenea proces nivelul zgomotelor poate fi ridicat. In acest caz, prin zgomote se inteleg acele perturbatii periodice sau aleatorii care se produc la frecvente parea ridicate pentru a putea fi compensate de actiunea de reglare. Curgerea turbulenta prin conducte si vibratiile produse de pompe constituie sursele principale ale acestui zgomot.
Pentru a evita introducerea lor in bucla de reglare, este necesar ca transmitatorul sa fie amortizat suficient , ceea ce se obtine uneori prin strangulari ale conductei de legatura spre proces. Cu o asemenea metoda exista insa riscul sa se introduca o amortizare prea mare, ceea ce ar face ca semnalul de iesire din transmitator sa aiba oscilatiile excesiv de aplatizate si deci indicatiile de pe inregistrator sa nu reproduca suficient de fidel variatiile de debit. Un asemenea semnal intrand in regulator nu reda deci variatiile reale ale debitului si, in consecinta, acesta nu compenseaza in mod satisfacator perturbatiile. In unele transmitatoare (mai noi) se prevede o amortizare reglabila putandu-se obtine constante de timp intre 0,2 si 4s.
In ceea ce priveste acordul regulatorului, trebuie observat ca in reglarile de debit, valorile pentru VR sunt mai mici decat acelea recomandate de criteriile uzual aplicate in practica.
 Pentru un regulator PI, care este in
mod normal utilizat in reglarile de debit, prin aplicarea metodei limitei
de stabilitate si recomandarile Ziegler Nichols, valorile de acord
sunt VR=0,45 VR0 si Ti=0,8T0.
In figura 7 este prezentata diagrama Bode pentru bucle de reglare din
schema bloc din figura 1 pentru o perturbatie z. Valorile respective
pentru acordarea regulatorului sunt in acest sistem VR=4,2 si Ti=1,0s.
Cu aceste valori, curba amplitudinii pentru Q/Z are un maxim egal cu 2 pentru
frecventa de rezonanta w=4rad/s, ceea ce reprezinta un rezultat nesatisfacator.
Daca se reduce VR la 2 pastrandu-se valoarea
precedenta pentru Ti se obtine un raport Q/Z de
aproximativ 1, adica 50% din cel precedent, ceea ce
imbunatateste sensibil reglarea pentru frecventa
respectiva din spectrul perturbatiei z. In schimb, reglarea este mai
putin satisfacatoare pentru perturbatii de
frecventa mai redusa. Daca pentru a se compensa reducerea
lui VR se reduce si Ti, de exemplu la 0,5s, si
VR=2 se obtine o curba pentru Q/Z putin
deosebita fata de prima curba. Valoarea finala VR
si Ti depinde si de natura variatiilor de sarcina, dar se poate
recomanda, in general, pentru acordul optim al
regulatorului PI in buclele de debit. (VR =0,3 VR0 si
Ti = 0,8 T0.
Pentru un regulator PI, care este in
mod normal utilizat in reglarile de debit, prin aplicarea metodei limitei
de stabilitate si recomandarile Ziegler Nichols, valorile de acord
sunt VR=0,45 VR0 si Ti=0,8T0.
In figura 7 este prezentata diagrama Bode pentru bucle de reglare din
schema bloc din figura 1 pentru o perturbatie z. Valorile respective
pentru acordarea regulatorului sunt in acest sistem VR=4,2 si Ti=1,0s.
Cu aceste valori, curba amplitudinii pentru Q/Z are un maxim egal cu 2 pentru
frecventa de rezonanta w=4rad/s, ceea ce reprezinta un rezultat nesatisfacator.
Daca se reduce VR la 2 pastrandu-se valoarea
precedenta pentru Ti se obtine un raport Q/Z de
aproximativ 1, adica 50% din cel precedent, ceea ce
imbunatateste sensibil reglarea pentru frecventa
respectiva din spectrul perturbatiei z. In schimb, reglarea este mai
putin satisfacatoare pentru perturbatii de
frecventa mai redusa. Daca pentru a se compensa reducerea
lui VR se reduce si Ti, de exemplu la 0,5s, si
VR=2 se obtine o curba pentru Q/Z putin
deosebita fata de prima curba. Valoarea finala VR
si Ti depinde si de natura variatiilor de sarcina, dar se poate
recomanda, in general, pentru acordul optim al
regulatorului PI in buclele de debit. (VR =0,3 VR0 si
Ti = 0,8 T0.
In ceea ce priveste caracteristicile regulatorului, pentru a se compensa valorile mici ale lui VR se prevede intotdeauna in buclele simple si efectul I. Altfel, adica utilizand un regulator numai cu efect P si cu un VR mic s-ar obtine un regim stationar cu abatere stationara mare. Numai in reglarile in cascada in care bucla secundara regleaza un debit ar putea fi, eventual, suficient si un regulator P, abaterea stationara fiind in acest caz compensata in bucla principala.
Prezenta zgomotului care insoteste debitul impiedica folosirea efectului D. Prin introducerea unui efect D s-ar obtine un avans de faza util, dar cresterea amplificarii la frecvente inalte care insoteste efectul D poate produce instabilitatea buclei de reglare. In plus trebuie observat ca nu este indicat sa se prevada un regulator PID plecandu-se de la presupunerea ca se poate anula efectul D, pentru ca in unele regulatoare PID ramane intotdeauna un efect D rezidual. Pe de alta parte, Ti in reglarile de debit poate avea valori mici, sub 10 s, ceea ce uneori este mai putin decat limita inferioara pentru Ti din regulatoarele PID; limita maxima pentru Ti in asemenea bucle de reglare de debit depaseste rareori 100 s. De asemenea, valoarea lui VR poate fi mica, respectiv BP mare. Din aceste considerente, in unele sisteme unificate se realizeaza in mod special un regulator PI pentru procese rapide cu Ti incepand de la valori mici si cu o banda de proportionalitate eu un domeniu mai larg si care este utilizat in primul rand in reglarile de debit. Un exemplu ii constituie regulatorul electronic PI, FEA ELC 113 A, care are domeniul pentru BP de 4400% si pentru Ti de 1100s in 24 de trepte, in timp ce regulatorul electronic PID, FEA 113 are domeniul pentru BP de 2200%, pentru Td de 10s 30 minute si pentru Td de 010 min. Acest ultim regulator nu este indicat pentru reglarile de debit.
1.4. Reglari de raport de debite
Cea mai frecventa structura pentru reglarea unui raport de debite este aceea aratata in fig. 8, care se refera la amestecul a doua substante A si B intr-un reactor. Debitul de substanta B are un sistem de reglare conventional cuprinzand regulatorul PI, ventilul si elementul de masurare, insa marimea de intrare in acest regulator nu este constanta, ci depinde de debitul de substanta A si de o informatie suplimentara primita de la regulatorul pentru compozitie de la reactor.
Semnalul qMA din elementul de masurare a debitului QA,
precum si semnalul qCC din regulatorul de compozitie
intra intr-un element de calcul in care se realizeaza relatia qR = qCCx qMA
Semnalul qR constituie marimea de intrare in regulatorul de debit pentru substanta B, care va obtine ca debitul qMB sa fie egal cu qR Dinamica: sisteme16r de reglare pentru debite a fost discutata in paragrafele precedente. Este insa necesar sa se observe ca in aceasta structura reglarea debitului constituie de fapt un sistem de urmarire, marimea de intrare in regulatorul de debit R2 adica qR fiind variabila. Perturbatiile care apar in circuitul de reglare a debitului qB au in acest caz un rol mai putin important. Daca variatiile debitului qA nu sunt rapide si nici mari, aceasta fiind situatia obisnuita in practica, atunci acordul regulatorului R2 se va face conform cu cele de la § 1.3. Deoarece qCC soseste de la regulatorul R1 care asigura concentratia finala, nu este strict necesar ca elementul de calcul sa aiba precizia deosebita. Sistemul de reglare a nivelului din reactor are elementul de executie pe debitul QA pe care nu se mai gaseste un alt ventil de reglare. De obicei, QA este debitul cel mai important. Daca raportul intre debitele QA si QB este de asteptat sa varieze in limite largi, atunci nu va fi suficient pentru reglarea nivelului un regulator P, deoarece in asemenea situatii s-ar putea ca nivelul sa nu poata fi mentinut intre limitele maxima si minima stabilite. Va trebui in asemenea situatii sa se prevada pentru R3 un regulator PI.
Un
dezavantaj al acestei scheme deriva din faptul ca regulatorul de
nivel face comanda de modificare a debitului QA fara a
declansa in acelasi timp si o modificare corespunzatoare a
debitului QB. Debitele QA si QB nu vor
satisface catva timp relatia de raport ceruta. Rezulta de aici
ca prezenta reglarii de nivel poate aduce modificari
temporare ale raportului intre cele doua debite QA si QB,
ceea ce poate sa nu fie
tolerat de desfasurarea procesului in reactor. Daca o asemenea
situatie trebuie evitata, se poate aplica schema imbunatatita
din figura 9, in care semnalul de comanda a regulatorului de nivel
comanda in cascada debitul QA, si in acelasi
timp, intra in elementul de raport pentru ca impreuna cu marimea
QCC de la regulatorul de compozitie sa determine
marimea de intrare in regulatorul debitului QB. Chiar si
in aceste conditii, din cauza prezentei elementului de calcul, apare
o intarziere in stabilirea marimii de intrare in sistemul de reglare a
debitului QB. Daca intarzierea introdusa de elementele de
calcul este importanta fata de constantele de timp din cele
doua bucle de reglare, atunci este indicat sa se introduca un
element de intarziere echivalent pe drumul semnalului de comanda de la
regulatorul de nivel inainte ca acesta sa intre in regulatorul debitului QA.
De altfel, orice alta deosebire dintre constantele de timp ale celor
doua bucle de reglare pentru debit poate fi compensata in mod analog.
O
alta conceptie pentru o asemenea reglare este prezentata in
figura 10 conform careia semnalele de la cele doua debitmetre sunt
introduse intr-un elemenrt de calcul care realizeaza operatia ![]() . Semnalul qR
intra in regulator si acesta modifica corespunzator debitul
QB. Studiul analitic al acestei bucle de reglare are drept scop in
primul rand sa stabileasca caracteristica functionala a
ventilului si apoi caracteristica intrinseca a acestuia. Concluziile
unei asemenea analize sunt rezumate in cele ce urmeaza.
. Semnalul qR
intra in regulator si acesta modifica corespunzator debitul
QB. Studiul analitic al acestei bucle de reglare are drept scop in
primul rand sa stabileasca caracteristica functionala a
ventilului si apoi caracteristica intrinseca a acestuia. Concluziile
unei asemenea analize sunt rezumate in cele ce urmeaza.
Daca masurarea se face cu o diafragma si caderea de presiune pe ventil este constanta, situatie care se intalneste atunci cand reglarea debitului se face intre doua surse de presiune constanta cu o cadere de presiune neglijabila in restul conductei, atunci, deoarece Q/X =KQ, este indicat, in conformitate cu tabelul 1 un ventil echiprocentual. Daca instalatia cuprinde o pompa centrifuga sau are loc o importanta cadere de presiune pe linie, trebuie aleasa o caracteristica intrinseca mai aproape de hiperbola. Daca elementul de masurare este liniar si raportul debitelor QB/QA este aproximativ constant, atunci un ventil cu caracteristica echiprocentuala este satisfacator.
Daca
in ambele cazuri de mai sus QB/QA are variatii mari,
realizarea unor asemenea reglari de precizie necesita adaugarea
unor elemente de calcul pentru ca in cazul masurarii cu
diafragma produsul  sa fie constant sau, in cazul masurarii cu un
element liniar
sa fie constant sau, in cazul masurarii cu un
element liniar  sa fie constant.
Daca masurarile de debit se fac cu diafragme si valorile
respective sunt introduse intr-un element de calcul de raport care este
completat cu un extractor de radacina patrata, atunci
sistemul se comporta ca si in cazul unor masurari liniare.
sa fie constant.
Daca masurarile de debit se fac cu diafragme si valorile
respective sunt introduse intr-un element de calcul de raport care este
completat cu un extractor de radacina patrata, atunci
sistemul se comporta ca si in cazul unor masurari liniare.
Comparatia intre cele trei concepte de reglare duce la urmatoarele concluzii suplimentare:
Costul sistemului "in circuit deschis" este aproximativ acelasi cu al sistemului "in circuit inchis". Performantele sunt aproximativ aceleasi.
Sistemul imbunatatit din figura 9 este mai costisitor, dar performantele lui sunt mai bune.
Sistemul "in circuit inchis" necesita un element de calcul pentru raport de o precizie mai mare, deoarece in structura respectiva performantele finale ale amestecului depind de acest element. In celelalte cazuri nu se cere o precizie deosebita a elementului de calcul.
Cerintele in ceea ce priveste caracteristica intrinseca a ventilului sunt cele mai critice in aceasta ultima structura.
3. Reglarea temperaturii intr-un incalzitor
In general, reglarea temperaturii in schimbatoarele de caldura in care energia termica este transferata prin radiatie, prin amestec de fluid cald si rece sau prin conducte prin pereti nu ridica probleme deosebite cu exceptia cazurilor in care se solicita o reglare cu performante deosebit de ridicate. Metodele aproximative pentru a determina caracteristicile unor asemenea procese dau rezultate suficient de precise pentru necesitatile practice uzuale.
S-a luat ca exemplu reglarea temperaturii intr-un incalzitor in care energia termica este produsa prin arderea unui combustibil. Acest exemplu este caracteristic pentru numeroase reglari industriale de temperatura.
3.1. Descrierea procesului si functia lui de transfer
Schema procesului tehnologic precum si elementele componente ale sistemului de reglarea sunt prezentate in figura 11. Se cere ca temperatura in interiorul incalzitorului, masurata la locul ales pentru montarea unui termocuplu, sa fie de 6000C. Pentru incalzire sunt necesari 1800m3/h gaze a caror putere calorica este de 7200 kcal/m3. Perturbatia principala in acest proces este provocata de variatia puterii calorice a gazului. Aceste variatii se presupun a fi 500kcal/m3 fata de valoarea medie indicata anterior. In schema tehnologica a procesului s-a prevazut numai aparatura necesara reglarii temperaturii si nu s-au figurat si alte reglari sau masurari necesare conducerii procesului. In particular, nu s-a figurat sistemul de reglare pentru raportul corect intre gaz si aerul de combustie.
Procesul tehnologic necesita mentinerea temperaturii la 6000 la locul montarii termocuplului.
Schema bloc a sistemului de reglare este aratata in figura 12. In aceasta schema s-au figurat, in afara de elementele obisnuite, si adaptoarele cuprinse in sistemul de reglare si anume:
Ai, adaptorul de intrare, care transforma iesirea din traductorul de masurare M intr-un semnal unificat pneumatic (0,2 - 1 kgf/m2) sau electronic (2-10mA).
Ae, adaptorul de iesire, care in cazul sistemului de reglare din figura trebuie prevazut numai daca regulatorul este electronic, pentru a se putea actiona elementul de executie pneumatic. In acest caz, adaptorul, denumit uneori si convertor, transforma semnalul electric primit de la regulator intr-un semnal pneumatic. In sistemele unificate aceasta transformare este de exemplu de la 2 - 10 mA la 0,2 . 1,0Kgf/cm2.
AR , adaptorul care in regulator transforma pozitia
unui buton intr-o marime de iesire i0, care constituie
marimea de intrare in sistem si care are o valoare in domeniul
variatiei sistemului unificat, adica intre 0,2 si 1kgf/cm2 in sistemele de reglare
pneumatice unificate, sau de exemplu intre 2 si 10 mA in unele sisteme
unificate electronice. Aceasta valoarea i0 corespunde in acest
caz la 6000C.
Pentru stabilirea functiei de transfer a procesului, determinarea caracteristicilor procesului, atunci cand se regleaza o temperatura, se face prin ridicari experimentale. Studiul analitic in asemenea cazuri este foarte anevoios si, din cauza numeroaselor aproximari care trebuie facute, rezultatele care se obtin sunt valabile numai ca o prima aproximatie. Deseori, stabilirea valorilor optimale a parametrilor VR, Ti si Td ai unui regulator PID, utilizat in asemenea sisteme de reglare, se face pe baza experimentala, prin incercari asupra instalatiei deja existente. In cazul instalatiilor noi este indicat insa sa se utilizeze o metoda pentru aceasta determinare inca din faza de proiectare, pentru a se reduce cantitatea de experimente cu instalatia in functiune si a se verifica daca, la regulatorul PID ales, domeniile de variatie ale parametrilor VR, Ti si Td cuprind si valorile optime probabile ale acestor parametri.
De obicei, pentru
asemenea procese exista o experienta bogata
obtinuta in instalatiile asemanatoare in
functiune si deci la stabilirea sistemului de reglare se pot utiliza
informatiile din aceste procese existente. In unele cazuri va fi desigur
necesar sa se faca ridicari experimentale ale acestor
caracteristici in instalatiile analoge existente. Cel mai frecvent se
obtine raspunsul procesului la o modificare in treapta a
marimii de executie. In procesul considerat, marimea de
executie este debitul de gaz de ardere si marimea de iesire
este temperatura masurata in acest caz cu un termocuplu. In
raspunsul procesului se include deci si raspunsul termocuplului,
adica raspunsul procesului este al unui ansamblu care are ca functie
de transfer Hp(s) si HM(s); se va presupune ca
un asemenea raspuns este dat de curba din figura 13. In care saltul Dm0 al
marimii de executie de la valoarea m0 este Dm0=73m3/h, debit masurat cu un debitmetru care nu este prezentat in
figura. Pentru a se stabili care este influenta traductorului de masurare
in aceasta curba, se apeleaza la caracteristica traductorului
utilizat, care este data in descrierea lui. In asemenea procese a
caror  constante de timp sunt de obicei mari, se poate neglija constanta de
timp TM a elementului de masurare si se ia in considerare
numai coeficientul lui de amplificare statica. Aceasta inseamna
ca functia de transfer HM a elementului de masurare ,
considerata de obicei de forma
constante de timp sunt de obicei mari, se poate neglija constanta de
timp TM a elementului de masurare si se ia in considerare
numai coeficientul lui de amplificare statica. Aceasta inseamna
ca functia de transfer HM a elementului de masurare ,
considerata de obicei de forma ![]() se reduce la HM(s)=KM.
In cazul termocuplului utilizat, caracteristica din care se determina KM
este cea din figura pentru intervalul
5500C . 6500C, in care se presupune ca va putea
varia parametrul reglat. Din aceasta curba rezulta
se reduce la HM(s)=KM.
In cazul termocuplului utilizat, caracteristica din care se determina KM
este cea din figura pentru intervalul
5500C . 6500C, in care se presupune ca va putea
varia parametrul reglat. Din aceasta curba rezulta ![]() . Utilizarea curbei
experimentale se poate face in mai multe feluri ca de exemplu:
. Utilizarea curbei
experimentale se poate face in mai multe feluri ca de exemplu:
- Prin aproximarea raspunsului dat de aceasta curba printr-un raspuns al unui proces fictiv avand un timp mort Tm si o constanta de timp T, adica printr-o functie de transfer de forma:
![]()
Facand constructiile respective, din figura se deduce Tm=140s si T=560s. Pentru determinarea lui K=KPKM, se va utiliza figura 18 in care Dm0KPKM=0,5mV si deci:
![]()
Daca se tine seama de valoare lui KM stabilita inainte, atunci:
![]()
si aceasta valoare poate fi utilizata in sistemele de reglare in care elementul de masurare are alta caracteristica decat cea din figura 19. Rezulta deci ca:
![]()
- Deoarece aproximarea precedenta conduce la procese cu un timp mort mult mai mare decat in procesul real, s-au stabilit si alte metode pentru a se inlocui procesul real dat cu curba din figura 18 printr-un proces fictiv. Daca aceasta aproximare se face printr-un proces fictiv avand doua constante de timp T1 si T2 si un timp mort Tm, una din aceste metode preconizeaza sa se considere ca timp mort, timpul care apare in curba raspunsului din figura 13, adica Tm=50s. Constantele de timp T1 si T2 se determina in aceasta metoda cu ajutorul relatiilor:
![]()
in care t30 si t70 sunt timpii in care, dupa trecerea timpului mort Tm considerat, marimea de iesire ajunge la 30% respectiv 70% din cresterea finala, provocata de saltul in valoarea marimii de intrare. Facand masurarile pe figura 13 si introducand valorile aflate rezulta:
![]()
Procesul real se aproximeaza in felul acesta prin functia de transfer:
![]()
3.2. Functia de transfer a elementelor componente
a) Elementul de masurare (traductorul). Daca se presupune ca s-a utilizat traductorul a carui caracteristica statica este cea din fig. 14 atunci, neglijand constanta lui de timp, functia de transfer este:
![]()
Daca se considera a se introduce si constanta de timp TM, atunci aceasta se obtine din datele de catalog ale traductorului, sau prin ridicari experimentale asupra traductorului existent.
 b) Adaptorul de
intrare, Ai. Daca regulatorul este de tip pneumatic, acest
adaptor va transforma t.e.m. primita de la termocuplu intr-o variatie
de presiune 0,2 . 1,0 Kg/cm2 pentru domeniul fixat al variatiei
de temperatura. In cazul unui adaptor electronic destinat unui regulator
electronic, domeniul de variatie al semnalului de iesire este acel al
sistemului unificat ales, de exemplu 2 . 10 mA. Functia de transfer a unui
asemenea sistem este considerata a avea forma:
b) Adaptorul de
intrare, Ai. Daca regulatorul este de tip pneumatic, acest
adaptor va transforma t.e.m. primita de la termocuplu intr-o variatie
de presiune 0,2 . 1,0 Kg/cm2 pentru domeniul fixat al variatiei
de temperatura. In cazul unui adaptor electronic destinat unui regulator
electronic, domeniul de variatie al semnalului de iesire este acel al
sistemului unificat ales, de exemplu 2 . 10 mA. Functia de transfer a unui
asemenea sistem este considerata a avea forma:
![]()
![]()
in care marimile KA si TA se determina din datele de catalog ale elementului. De obicei, in sistemele de reglare pentru temperaturi, constantele de timp ele procesului sunt mari si, cum TA este de ordinul secundelor, poate fi neglijat. Functia de transfer a adaptorului devine HA=KA. In cazul unui adaptor Ai pneumatic, caracteristica lui statica este data ca in figura 15. Pentru domeniul de intrare de 5mV se obtine de domeniul de iesire 0,8kgf/cm2
Rezulta ![]() . Pentru un adaptor
electronic cu semnal unificat de 2 . 10mA:
. Pentru un adaptor
electronic cu semnal unificat de 2 . 10mA:
![]()
c) Elementul de executie. Prin datele procesului s-a stabilit ca se obtine o temperatura de 6000C cu un debit de combustibil Q=1800m3/h avand o putere calorica de 7200kcal/m3. s-a presupus ca perturbatia provine de la variatia acestei puteri calorice cu 500kcal/m3. Pentru ca aceasta cantitate de caldura sa fie furnizata procesului si la limitele extreme ale perturbatiei puterii calorice a gazului de ardere, volumul de gaz va trebui sa varieze cu 130m3/h fata de valoarea nominala de 1800m3/h. In asemenea cazuri se asigura pentru ardere un debit de baza de combustibil si printr-o conducta in derivatie se face o admisie suplimentara de gaz, printr-un ventil care este introdus in sistemul de reglare. Pentru a se dispune de o rezerva la ambele extremitati ale perturbatiei, alimentarea de baza in acest caz se va lua de 1650m3/h, iar ventilul va fi dimensionat pentru un debit normal de 300m3/h. Functia de transfer a uni ventil este considerata de forma:
![]()
in care KE si TE se deduc din datele de catalog ale elementului sau prin experimentare. De obicei, TE este de ordinul zecilor de secunde si in cazul reglarii proceselor termice cu constante mari de timp poate fi considerata zero. Functia de transfer a elementului de executie devine deci HE=KE. In figura 16 se prezinta caracteristica statica a unui asemenea ventil la care
d) Adaptorul de iesire, Ae. Daca regulatorul este electronic, de exemplu cu semnal unificat de 2 . 10 mA si elementul de executie este ventilul considerat anterior, atunci trebuie intercalat intre ele un adaptor de iesire (convertor electropneumatic) a carui functie de transfer sa fie de aceeasi forma ca si adaptorul de intrare Ai. Acest adaptor de iesire are constanta de timp de ordinul secundelor si deci neglijabila fata de constantele de timp ale procesului. Coeficientul de amplificare statica va fi in acest caz:
![]()
e) Regulatorul. Functia de transfer a regulatorului este:
3.3 Functia de transfer a intregului sistem. Acordul regulatorului
Functia de transfer a sistemului (deschis) cu un regulator pneumatic, adica fara adaptor de iesire este:
![]()
Pentru aplicarea criteriului Ziegler Nichols, spre a alege valorile optime pentru VR, Ti si Td se va construi diagrama Bode pentru toate elementele cu exceptia regulatorului. Cu datele numerice de mai sus, aceasta diagrama s-a trasat in figura 17.
Pulsatia care corespunde fazei de -1800 este de 1,2x10-2[s-1] si deci perioada de oscilatie a sistemului, la limita de stabilitate, este:
![]()
Coeficientul de amplificare statica a sistemului deschis, exclusiv regulatorul este:
![]()
ceea ce corespunde cu o pierdere de 8dB. Pe diagrama Bode din figura 17 s-a trasat aceasta linie orizontala trecand prin valoarea ordonatei de -8dB, Functiile de transfer ale partilor componente ale procesului s-au figurat prin linii drepte. Din diagrama rezulta ca amplitudinea sistemului de reglare in circuit deschis fara regulator pentru faza de -1800 este de -23dB, ceea ce corespunde la o amplificare de 0,7,
 Pentru a se
obtine un coeficient de amplificare global al sistemului deschis egal cu
unitatea, adica pentru ca sistemul sa fie adus la limita de
stabilitate, trebuie ca amplificarea corespunzatoare VR0 introdusa de
regulator sa fie . Aplicand
criteriul Ziegler-Nichols pentru dimensionarea optima a parametrilor unui
regulator PID utilizind parametrii VR0 si T0 se obtin valorile
optime:
Pentru a se
obtine un coeficient de amplificare global al sistemului deschis egal cu
unitatea, adica pentru ca sistemul sa fie adus la limita de
stabilitate, trebuie ca amplificarea corespunzatoare VR0 introdusa de
regulator sa fie . Aplicand
criteriul Ziegler-Nichols pentru dimensionarea optima a parametrilor unui
regulator PID utilizind parametrii VR0 si T0 se obtin valorile
optime:
VR=0,6VR0=8,5 (banda de proportionalitate 12%),
Ti=0,5T0=4,3min =258s
Td=0,12T0=1,0min =60s
4. Reglari de presiune si de nivel
Ecuatiile care descriu aceste procese au aceeasi forma si anume Sdh (Qi Qe)dt pentru nivele si Vdp = (Qi Qe)dt pentru presiune, in care Qi si Qe sunt debitul de intrare si de iesire, S si V suprafata si volumul rezervoarelor respective. Din aceasta exprimare matematica identica a descrierii proceselor rezulta ca si studierea sistemelor de reglare respective este esential aceeasi. Trebuie totusi observat ca in unele cazuri procesele in care se regleaza nivelul nu au autoreglare, situatie uzuala in procesele in care se regleaza presiunea. De asemenea, trebuie avuta in vedere relatia care exista intre debit pe de-o parte si presiunea si nivelul pe de alta parte. Pentru a regla presiunea sau nivelul este necesar sa se varieze debitul; pentru a se regla debitul este nevoie sa se modifice presiunea sau nivelul. Consecinta este ca nu se pot regla simultan debitul si presiunea sau debitul si nivelul in acelasi proces. Trebuie, de asemenea, facuta o distinctie intre diferitele scopuri pentru care se realizeaza reglarile de presiune sau nivel. in unele cazuri, aceste reglari sunt importante chiar pentru procesul la care se aplica. De exemplu, este important ca nivelul sa se mentina intr-un rezervor la o anumita valoare, pentru ca in felul acesta in volumul respectiv pot avea loc in mod corect unele reactii sau se asigura in felul acesta o suprafata conform cu calculele de proiectare pentru transferul de caldura pentru procesul care are loc in rezervor. In alte cazuri, scopul reglarii de nivel sau presiune este de a asigura in mod satisfacator un transfer de materie spre procesul din aval si deci reglarile de nivel sau presiune nu sunt importante prin ele insele. Acestor doua situatii le corespund cerinte diferite in ceea ce priveste performantele sistemelor de reglare respective.
In cazul unei reglari din prima categorie, de obicei se cere ca in regim stationar presiunea, respectiv nivelul sa fie egale cu marimea de referinta. Pentru aceasta, va trebui sa se prevada regulatoare PI. In cazul reglarii nivelului trebuie facuta o alegere cu grija a elementului de masurare si anume sa aiba o constanta de timp mica, pentru ca reglarea sa fie rapida. Cu un regulator PI sistemele de acest fel pot fi insa conditionat stabile. Aceasta inseamna ca, daca Ti este mentinut constant, o crestere a lui VR poate sa aiba ca efect o crestere a stabilitatii si valori si mai mari ale lui VR sa duca la o scadere a stabilitatii.
Daca reglarea are drept scop sa asigure un debit de materie spre procesele urmatoare, in regim stationar va fi o egalitate intre debitul de iesire si cel de intrare si, in acelasi timp, in rezervorul respectiv va exista o cantitate de materie caracterizata prin valoarea presiunii sau nivelului intre o valoare maxima si una minima. Asemenea reglari dau in ansamblu cele mai bune rezultate daca regulatorul este de tip P. Un asemenea regulator este mai ieftin si mai usor de acordat. Un regulator PI in cazul unor perturbatii mai indelungate de sarcina va determina un debit de iesire mai mare temporar decat debitul de intrare. Cu un asemenea regulator utilajele din aval trebuie dimensionate cu o capacitate suplimentara pentru a putea prelua asemenea varfuri. De asemenea, in perioada de pornire regulatoarele PI pot duce la depasiri importante ale marimii de referinta si deci la necesitatea conducerii manuale a procesului, situatie care, in general, se poate evita cu regulatoarele P.
In cazul reglarilor de nivel,
regulatorul P asigura o protectie fata de o excesiva umplere sau
golire a rezervorului, protectie care se obtine cu regulatorul PI sau
PID numai cu acordari speciale. De altfel, efectul D din regulatoarele PID
poate produce perturbatii in ceea ce priveste stabilitatea daca
rezervorul este mic chiar daca valoarea lui Td este cea
minima. In rezervoarele mari, in care valoarea medie V/Q este mare in comparatie cu valoarea maxima a lui Ti din regulator, introducerea efectului I poate
produce perturbatii in stabilitatea sistemului deoarece acest Ti
maxim poate fi prea mic. Pentru a se obtine o reglare satisfacatoare
trebuie luate in acest caz valori mari pentru Ti si mici
pentru VR. Valorile mari pentru Ti maresc
stabilitatea sistemului in timp ce valorile mici pentru VR duc la un sistem foarte subamortizat. S-ar putea deci ca luand valori
prea mici pentru VR sa se obtina un sistem de
reglare cu tendinta de a oscila continuu cu o foarte mare perioada. O
relatie utila pentru determinarea adecvata a parametrilor Ti
si VR este ![]() in care V este volumul lichidului din rezervor si (QV)M
este debitul maxim prin ventil. Din aceasta formula se deduce
relatia aproximativa
in care V este volumul lichidului din rezervor si (QV)M
este debitul maxim prin ventil. Din aceasta formula se deduce
relatia aproximativa  , care
permite sa se stabileasca daca regulatorul PI are o valoare maxima pentru T,
suficienta sau sa se determine V daca se
cunoaste Ti si (Qv)M.
, care
permite sa se stabileasca daca regulatorul PI are o valoare maxima pentru T,
suficienta sau sa se determine V daca se
cunoaste Ti si (Qv)M.
De obicei, performantele unui sistem de reglare pentru nivel sunt satisfacatoare daca se mentine nivelul in limite de 5% fata de nivelul normal. Modificari ale nivelului de 1 nu au practic nici o importanta in cele mai multe procese.
In general, constanta de timp a procesului in cazul
reglarilor de nivel este foarte mare in comparatie cu celelalte
constante de timp, adica ale ventilului si instrumentului de
masurare. Constanta de timp a acestui proces este ![]() . Daca S=2,4m2, hn=2,4m
si h0=1,5m (inaltimea de lichid
echivalenta presiunii p0 din rezervor) Qn=1,2m/min,
atunci Tp=15 m. Restul constantelor de timp din sistemul de
reglare pot fi TE=20s si TM=2s si deci
influenta lor este neglijabila. In consecinta se poate
alege un regulator P cu VR destul de mare astfel incat abaterea stationara
sa fie mai mica chiar pentru perturbatii mari, de exemplu de 25%
fata de debitele normale. Abaterea maxima este de aproximativ
1,5 ori mai mare decat abaterea stationara si deci va intra in limita
de 5% indicata mai sus.
. Daca S=2,4m2, hn=2,4m
si h0=1,5m (inaltimea de lichid
echivalenta presiunii p0 din rezervor) Qn=1,2m/min,
atunci Tp=15 m. Restul constantelor de timp din sistemul de
reglare pot fi TE=20s si TM=2s si deci
influenta lor este neglijabila. In consecinta se poate
alege un regulator P cu VR destul de mare astfel incat abaterea stationara
sa fie mai mica chiar pentru perturbatii mari, de exemplu de 25%
fata de debitele normale. Abaterea maxima este de aproximativ
1,5 ori mai mare decat abaterea stationara si deci va intra in limita
de 5% indicata mai sus.
Daca raportul intre primele doua constante de timp este de ordinul din exemplul de mai sus, nu este necesara nici o analiza mai amanuntita a sistemului de reglare, pentru ca oricum, si cu un regulator P se vor obtine reglari satisfacatoare. Dificultatile vor aparea la reglarea nivelului in rezervoare mici pentru care constanta de timp a procesului va fi mai mica de 1 minut.
Reglarea nivelului in cazanele de abur constituie o problema mai complicata. Daca debitul de abur creste brusc, expansiunea bulelor de abur produce cresterea aparenta a nivelului. In asemenea cazuri, reglarea nivelului se face preluand informatii suplimentare si anume debitul de abur si debitul de apa de alimentare (sistem de reglare cu trei impulsuri).
Daca sistemul de reglare serveste pentru o alimentare satisfacatoare a procesului din aval, atunci este importanta variatia debitului de iesire dQe/dt pentru o variatie treapta DQi a debitului Qi de la intrare. Deoarece raspunsul poate fi aproximat utilizand numai constanta de timp Tp a procesului pentru o perturbatie treapta a sarcinii, variatia lui h va fi pentru KE=KM=1:
![]()
in care:
![]()
In acest caz:
![]()
Aceasta relatie impreuna cu:
![]()
permit sa se calculeze dimensiunile rezervorului care sa indeplineasca anumite limitari in ceea ce priveste variatia lui Qe si a lui h pentru o perturbatie treapta a lui Qi.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |