
Raport de Cercetare
Grant: Structuri avansate de conducere a actionarilor electrice cu motoare pas cu pas
I. Interfata specializata pentru comanda in timp real a actionarilor electrice cu motoare pas cu pas (MPP)
Interfata necesara comenzii cu calculatorul IBM-PC a unui MPP a fost realizata pe o asa-numita placa prototip pentru care exista prevazut conector pe placa de baza a calculatorului si cuprinde elementele necesare atat pentru comanda in circuit deschis cat si pentru comanda in circuit inchis. Schema bloc a acestei interfete este prezentata in Fig. 1 iar schema electrica este cea din Fig. 2.
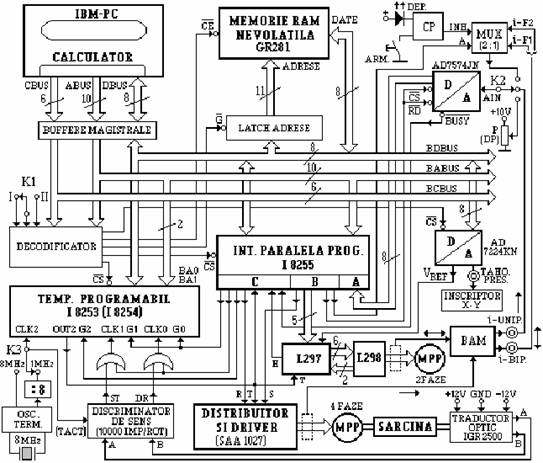
Fig. 1. Schema bloc a interfetei cu calculatorul IBM-PC486.
Semnalele provenite din magistrala I/O a calculatorului IBM-PC sunt amplificate cu ajutorul buffer-elor pentru date (I1, 74LS245) si a celor pentru adrese si semnale de comanda (I2, I3, I4, 74LS244). In cazul calculatoarelor IBM spatiul utilizabil pentru placi prototip este cuprins intre (0300)H (031F)H. Pentru realizarea acestui spatiu de adresare se foloseste un decodificator realizat cu porti logice si cu un demultiplexor (I11, 74LS139). Comutatorul K1 permite plasarea tuturor perifericelor in zona [2], [10], [13]:
![]() (1)
(1)
sau
![]() (2)
(2)
in cazul unei extensii a sistemului de calcul.
Fig. 2. Schema electrica a interfetei pentru comanda cu calculatorul a MPP.
Buffer-ul de date I1 este validat cand se executa operatia de citire/scriere (DIR=NBIOR) in spatiul de adrese al placii:
![]() (3)
(3)
Fig. 2 (continuare). Schema electrica a interfetei pentru comanda cu calculatorul a MPP.
Sistemul realizat a fost prevazut cu 2KB de memorie RAM nevolatila (I15, GR281) in care se poate stoca programul aplicatiei (bateria inclusa garanteaza pastrarea informatiei timp de 10 ani).
Deoarece in calculatorul utilizat toate segmentele de memorie de 64 KB erau ocupate, s-a realizat adresarea memoriei folosind magistrala DBUS. Astfel, se folosesc 2 latch-uri (I13, I14, 74LS373), adresa stabilindu-se in 2 etape: se trimit intai primii 8 biti mai putini semnificativi ai adresei (A7 A0) si apoi urmatorii 3 biti (A10 A8). Se poate defini astfel, un spatiu de memorie RAM nevolatila de 2 KB intre indiferent care limite. In sistemul realizat, aceste limite sunt (0000)H si (7FFF)H.
Profilul prescris de viteza poate fi vizualizat cu ajutorul calculatorului sau prin intermediul unui inscriptor X-Y conectat la iesirea unui convertor numeric-analogic de 8 biti, de precizie, de consum scazut si direct interfatabil cu microprocesorul (I23, AD7224KN). Totodata, acest convertor serveste si pentru stabilirea tensiunii analogice de referinta [0 3]V necesara circuitului integrat specializat L297 de comanda bipolara a MPP [4], [14], [17].
Pentru masurarea curentilor din fazele MPP s-a prevazut un convertor analog-numeric de 8 biti (I16, AD7574JN) care utilizand tehnica aproximatiilor succesive asigura un timp de conversie de 15 s si un timp de acces de 150ns. Iesirile numerice folosesc logica cu trei stari, lucru care permite conectarea directa la portul de intrare al sistemului. Se pot masura curenti unipolari si bipolari, selectia realizandu-se cu comutatorul K2. Pentru masurarea curentilor bipolari s-a prevazut un multiplexor analogic cu 2 cai (I34, MMC4053) iar convertorul A/D este utilizat in conexiune bipolara (R16, R17, R18 si I35A: amplificator neinversor cu factorul de amplificare egal cu 2).
Nivelele tensiunilor de la intrarile canalelor de achizitie sunt de ±5VVV. Evitarea aparitiei la intrarea convertorului (AIN) a unor nivele de tensiune mai mari de 10V (domeniul acceptat la intrarea convertorului: 0V÷10V) se realizeaza cu ajutorul unui circuit de protectie (CP) realizat cu 2 comparatoare (I36A, I36B) si un circuit basculant bistabil realizat cu portile I37A si I37B. Depasirea limitelor de tensiune permise la intrare conduce la activarea circuitului basculant bistabil care la randul lui determina invalidarea multiplexorului. Totodata, convertorul A/D impreuna cu potentiometrul multitur P alcatuiesc un dispozitiv analogic de prescriere (DP) cu ajutorul caruia se poate prescrie numarul de pasi sau viteza unghiulara a MPP.
Tensiunile de referinta pentru cele 2 convertoare provin de la o sursa de tensiune de precizie (I24, AD584), deviatia maxima de la 10.000V fiind de ±7.25 mV intre 0 C si 70 C. Alte tensiuni de iesire (sub, intre sau peste cele standard: 10V; 7.5V; 5V; 2.5V) se pot obtine prin adaugarea a 2 rezistente exterioare.
Comanda MPP (semnalele de tact T si de sens R) este realizata prin intermediul unei interfete paralele programabile (I17, I8255) si al unui temporizator programabil (I18, I8253 sau I8254) care primeste semnal de tact de la un oscilator termostatat de 8 MHz (I28) realizat cu cuart.
Semnalele de comanda necesare controlerului L297 sunt generate prin intermediul portului B al circuitului I8255. Cu ajutorul intrarii PC4 a portului C de la acest circuit se citeste starea semnalului HOME furnizat de controlerul L297, acest lucru simplificand modificarea secventei de lucru [4], [14]. Semnalul de tact pentru comanda MPP este furnizat de numaratorul #2 al circuitului I8253.
Pentru comanda in circuit inchis s-a prevazut un traductor incremental de fabricatie germana (IGR2500C) cu 2500 impulsuri/rotatie. Pentru detectarea sensului de rotatie corect, fara erori si in situatia in care organul mobil al actionarii, la care este cuplat traductorul, oscileaza in jurul unei pozitii fixe, s-a utilizat o parte digitala simpla (3 circuite integrate I29, I30, I31). La iesirile celor 2 multiplexoare I30 se obtin impulsuri cu frecventa multiplicata cu 4 fata de cea a impulsurilor oferite de traductor (deci 10.000 impulsuri/rotatie) si in concordanta cu sensul de rotatie (Fig. 3). Semnalele DR (orar), ST (antiorar) sunt aplicate intrarilor de tact (CLKO, CLK1) ale numaratoarelor #0 respectiv #1 din temporizatorul programabil I8253.
Fig. 3. Formele de unda pentru discriminatorul de sens.
Exceptand puterile mari, distribuitoarele si driver-ele pentru MPP sunt astazi aproape toate integrate[14], [16], [17]. Prin urmare in cadrul sistem realizat s-a utilizat circuitul integrat specializat SAA1027 (I21), care ofera in plus siguranta si fiabilitate crescute. Circuitul asigura o comanda directa simpla a MPP unipolare cu 4 faze, etajul sau de iesire fiind capabil sa furnizeze curenti in faze de maximum 350mA. Din acest motiv s-a ales un MPP hibrid de fabricatie japoneza [77619325 (4017-839), Scotts Valley.CA], comandat unipolar in secventa dubla si cu urmatoarele caracteristici [14], [17]:
-puterea absorbita P=3.8W;
-tensiunea nominala de alimentare Un=12V;
-curentul nominal in infasurare In=160mA;
-rezistenta medie a fazei Rm=75Ω;
-inductivitatea medie a fazei Lm=45mH;
-unghiul de pas θp=1.8°;
-cuplul static sincronizant Mmax=0.05N·m;
-inertia rotorului Jm=1,5·10-6Kg·m2.
Aspectul general al interfetei realizate este prezentat in Fig. 4.
II. Dispozitiv de incarcare controlata a servomotoarelor electrice
Dispozitivul de incarcare este alcatuit dintr-o masina de curent continuu cu excitatie independenta (MCC) ce functioneaza in regim de franare prin cuplare inversa si comandata in indus la curent constant. In conditiile in care fluxul inductor este mentinut constant, la valoarea nominala Φn si considerand masina complet compensata, comanda in indus la curent constant va conduce la un cuplu de franare de asemenea constant. Schema de principiu este reprezentata in Fig. 5.
Valoarea curentului constant I si deci a cuplului de franare la arborele MPP se prescrie cu ajutorul potentiometrelor multitur P1 si P2, cuplate pe acelas ax. Pentru fiecare sens de rotatie este prevazut cate un generator de curent constant realizat cu tranzistoare bipolare, T1-T2 pentru sensul ORAR si T5-T6 pentru sensul ANTIORAR.
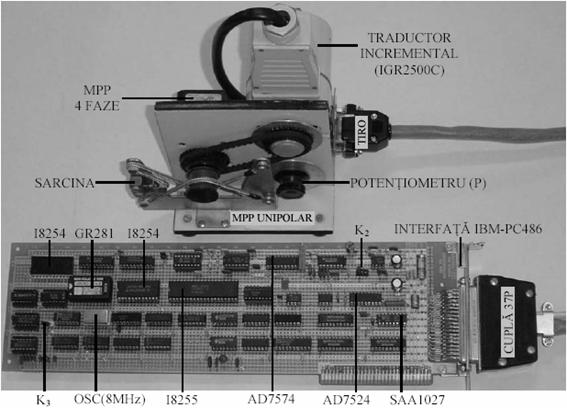
Fig. 4. Aspectul general al interfetei pentru comanda cu calculatorul IBM-PC486.
Intrerupatoarele statice T3-T4 realizate cu tranzistoare MOS cu canal N si comandate de comutatorul K2 (SENS) prin intermediul optocuploarelor de viteza ridicata OC1-OC2, asigura la arborele MPP un cuplu rezistent de natura reactiva [5], [6]:
![]() (4)
(4)
unde c este constanta de proportionalitate a cuplului de franare cu curentul din indusul masinii iar (t) este viteza unghiulara de rotatie.
Este prevazuta si modificarea automata a polaritatii curentului constant la schimbarea sensului de rotatie. In acest caz comutatoarele statice T3-T4 sunt comandate de semnalele SENS si NSENS furnizate de blocul de detectare a sensului de rotatie (vezi Fig. 2 si Fig. 3).
Totodata, dispozitivul conceput ofera si posibilitatea prescrierii unui soc de sarcina. Astfel, monostabilul MS impune durata socului de sarcina iar amplitudinea acestuia se prescrie prin intermediul rezistentelor R7-R14.
Generatoarele de curent constant sunt realizate cu tranzistoare bipolare complementare de tipul BD140-BD139 (T1-T5) si KD617-KD607 (T2-T6). Intrerupatoarele statice T3, T4 sunt tranzistoare MOS cu canal N de tipul IRF540 (UDS=100V, RDS(ON)=0.077W, ID=28A, PD=150W). Acestea sunt comandate cu optocuploare de viteza ridicata TLP251 (0.5A curent de iesire), concepute pentru comanda directa a dispozitivelor cu intrare MOS.
Masina de curent continuu utilizata (de fabricatie ruseasca C -240C), este cu excitatie separata si are urmatoarele caracteristici: tensiunea nominala Un=24V, curentul nominal In=1.9A, puterea nominala Pn=17.5W, turatia nominala nn=3400RPM.
MPP utilizat in acest caz (de fabricatie japoneza SP-57 54425376) are urmatoarele caracteristici [15], [18]: unghiul de pas θp=7.5 (48 pasi/tura), tensiunea de alimentare Un=24V, curentul nominal in faza In=0.16A, rezistenta fazei Rm= inductivitatea medie a fazei Lm=90mH.
Sistemul realizat mai cuprinde un traductor incremental de fabricatie germana cu 250 impulsuri pe rotatie [5], [6].
Constanta de proportionalitate a cuplului de franare cu curentul din indus a fost determinata pe cale experimentala, utilizand un sistem de greutati etalon:
![]() (5)
(5)
Fig. 5. Schema de principiu a dispozitivului de incarcare.
Ca rezultate experimentale sunt prezentate in continuare oscilogramele curentului prin indusul masinii de curent continuu. Fig. 6 prezinta raspunsul tranzitoriu de stabilire a curentului in indusul masinii de curent continuu si deci a cuplului de franare. Raspunsul este fara suprareglare si de durata scazuta, fapt ce justifica utilizarea acestui sistem la incarcarea motoarelor electrice de mica putere. In Fig. 7 este prezentat un ciclu complet de functionare. Oscilograma confirma posibilitatea impunerii atat a regimului de lucru de durata cat si a celui de suprasarcina.
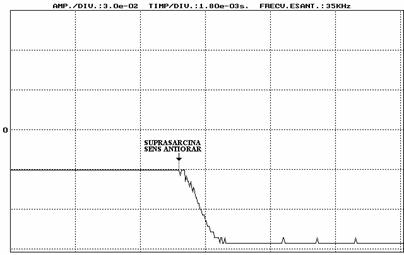
Fig. 6. Raspunsul tranzitoriu de stabilire a curentului in indusul masinii de c.c.
Aspectul general al dispozitivului de incarcare este prezentat in Fig. 8.
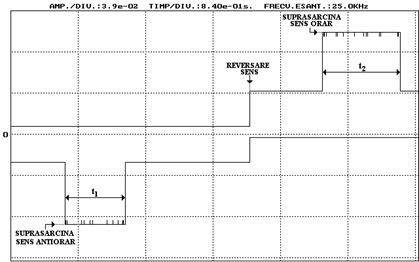
Fig. 7. Oscilograma unui ciclu complet de functionare.
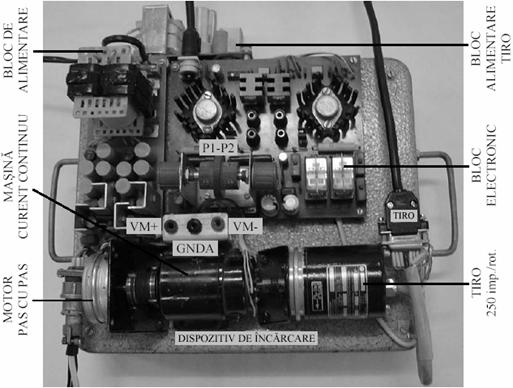
Fig. 8. Aspectul general al dispozitivului de incarcare.
III. Sistem de comanda in circuit deschis a motoarelor pas cu pas
Programul intitulat C-MPP a fost realizat intr-o maniera conversationala in mediul de programare BorlandC si este alcatuit din 4 subprograme de baza: comanda cu frecventa constanta (FRECV. CONST.), comanda cu profil prescris (POZITIONARE), analiza datelor dintr-un fisier (ANALIZA DATE) [2], [8], [10].
Aceste subprograme apeleaza subrutinele: esantionare (ESANT.), generare impulsuri de comanda cu frecventa constanta (CMPP1), generare impulsuri de comanda a caror frecventa evolueaza dupa o lege prescrisa (CMPP2), testare a numarului de pasi efectuati de motor (TEST-Np), calcul al constantelor de timp si al numarului de pasi prescris motorului (C-CT si C-Np*), filtrare (FILTRARE), derivare (DERIVARE), franare (FRANARE), afisare in timp a datelor (AFISARE DATE). Organigrama programului principal este prezentata in Fig. 9.
III.1. Subprogramul de comanda cu frecventa constanta
Subprogramul
numit FRECV. CONST. stabileste la inceput, intr-o maniera conversationala,
parametrii de lucru utilizator: frecventa de esantionare dorita feI 50.000]Hz,
frecventa dorita a impulsurilor de comanda
a motorului fcI 10.000]Hz, numarul dorit de pasi![]() , sensul de actionare dorit (orar=0; antiorar=1). Organigrama
subprogramului de comanda cu frecventa constanta este reprezentata in Fig. 10.
, sensul de actionare dorit (orar=0; antiorar=1). Organigrama
subprogramului de comanda cu frecventa constanta este reprezentata in Fig. 10.
Fig. 9. Organigrama programului
principal. 
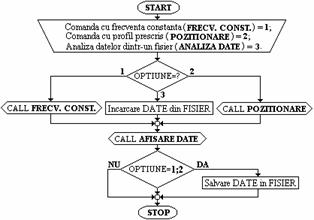
Fig. 10. Organigrama subprogramului de comanda cu
Fig. . Organigrama subrutinei de achizitie.
frecventa constanta.
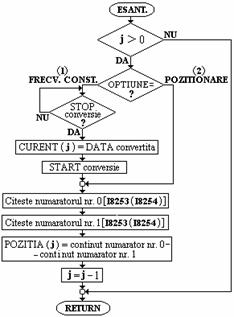
Semnalul de tact (T-SAA1027) necesar comenzii motorului este generat cu canalul #2 (OUT2) din circuitul I8253. Canalele #0 si #1 sunt utilizate la numararea impulsurilor ST (antiorar), DR (orar) furnizate de discriminatorul de sens. Prin urmare, modurile de lucru pentru canalele circuitului I8253 sunt: modul 2 pentru canalele #0 si #1 si modul 3 pentru canalul #2.
In prima etapa a programarii, canalele circuitului sunt incarcate cu zero, cuvintele de comanda fiind: (34)H (canal #0), (74)H (canal #1), (B6)H (canal #2). Apoi, in vederea memorarii la comanda a continutului contorului intr-un registru special, pentru a-l citi fara erori datorate regimurilor tranzitorii (citire din zbor), cuvintele de comanda ale canalelor #0 si #1 sunt (00)H respectiv (40)H.
Circuitul I8255 este programat in modul 0 (I/O), structura cuvantului de comanda fiind (98)H (porturile A, CHIGH=IN, porturile B, CLOW=OUT).
Impulsurile de comanda ale motorului sunt aplicate si circuitului I8255 (PC7) in vederea contorizarii numarului prescris de pasi. Totodata, circuitul I8255 genereaza semnalele: R(sens SAA1027, PC1), GATE2 (PC2), GATE0 (PC0), GATE1 (PC0) precum si un impuls de scurta durata (PC3) necesar pentru initializarea numaratoarelor #0 si #1 care sunt incarcate cu constantele (FFFF)H.
Achizitia se realizeaza cu subrutina ESANT de tratare a intreruperii de ceas (INT8) (Fig. 11). Aceasta subrutina este realizata in limbajul de asamblare al microprocesorului I80486, lucru care a condus la obtinerea unei frecvente de esantionare de 50 KHz [2], [10], [13]. Comanda MPP are loc cu subrutina CMPP1, a carei organigrama este prezentata in Fig. 12. Prelucrarea si afisarea datelor se realizeaza cu subrutina AFISARE DATE a carei organigrama este reprezentata in Fig. 13.
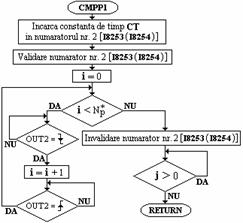
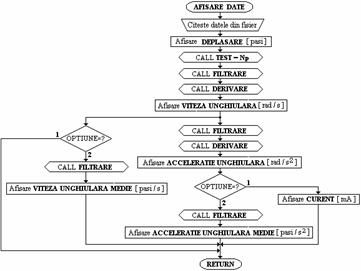
Fig. 12. Organigrama subrutinei de comanda a MPP. Fig. 13. Organigrama subrutinei de prelucrare si afisare a datelor.
In vederea obtinerii vitezei unghiulare instantanee a motorului, datele discrete achizitionate sunt filtrate cu subrutina FILTRARE care materializeaza un filtru trece jos cu pulsatia de taiere b fiind pulsatia proprie a sistemului (f0≈20Hz). Pentru generarea coeficientilor acestui filtru s-a folosit functia C2DM din pachetul de programe MATLAB [18]. Subrutina DERIVARE, utilizata la obtinerea vitezei unghiulare instantanee si acceleratiei unghiulare instantanee, materializeaza algoritmul numeric de derivare (Te fiind perioada de esantionare):
![]() (6)
(6)
Pentru reducerea oscilatiilor in jurul pozitiei finale s-a conceput subrutina FRINARE. In cadrul acestei subrutine, pe durata ultimului pas, prin intermediul intrarii de sens (R) a distribuitorului, se realizeaza o comanda bang-bang [1], [9], [11].
Atit subprogramul de comanda cu frecventa constanta cit si cel de comanda cu profilul prescris realizeaza si confirmarea numarului de pasi efectuati de motor (Np real). Pentru aceasta a fost conceputa subrutina TEST-Np.
Evolutia marimilor sistemului de actionare pe durata procesului tranzitoriu de pornire este reprezentata in Fig. 14. A fost aleasa o frecventa de comanda apropiata celei de rezonanta a MPP, lucrul acesta face ca regimul tranzitoriu de stabilire pe pas sa fie oscilant slab amortizat. Raspunsul unghiular al motorului fara si respectiv cu amortizare electrica prin comanda bang-bang este prezentat in Fig. 15 respectiv Fig. 16. Pentru aceasta, in cadrul programului, s-a conceput o lupa de timp.
III.2. Subprogramul de comanda cu profil prescris
Comanda unui MPP pentru deplasari mari necesita utilizarea de legi complexe, pentru a impiedica pierderea de pasi. In acest sens a fost conceput un subprogram de comanda cu profil prescris, organigrama acestuia fiind prezentata in Fig. 17. Subprogramul, intitulat POZITIONARE, permite prescrierea unui profil liniar sau exponential de viteza [3], [5], [6]. Subprogramul stabileste la inceput, intr-o maniera conversationala cu ajutorul unei interfete prietenoase cu mouse-ul, parametrii de lucru utilizator: frecventa maxima fmax, frecventa de start/stop fstart, timpul de accelerare ta, timpul de
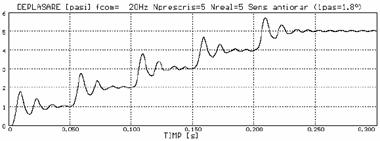
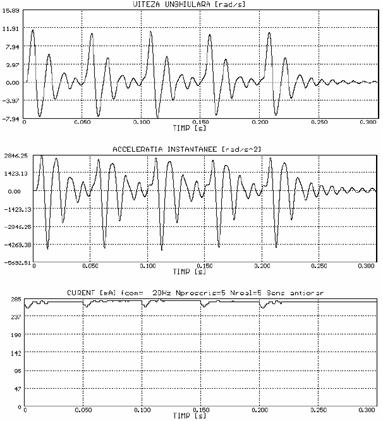
Fig. 14. Comanda MPP cu frecventa coborata (20Hz), sarcina redusa
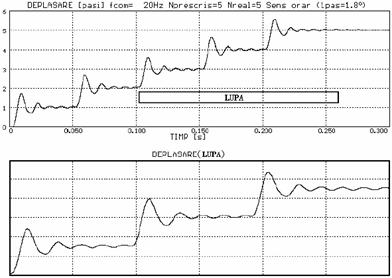
Fig. 15. Comanda MPP cu frecventa constanta (20Hz),
sarcina redusa si fara amortizare bang-bang
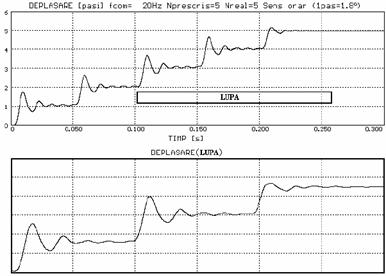
Fig. 16. Comanda MPP cu frecventa constanta (20Hz),
sarcina redusa si amortizare bang-bang
Fig. 19. Organigrama
subrutinei de generare a constantelor de timp. Fig. 18. Organigrama subrutinei de calcul al numarului de pasi.


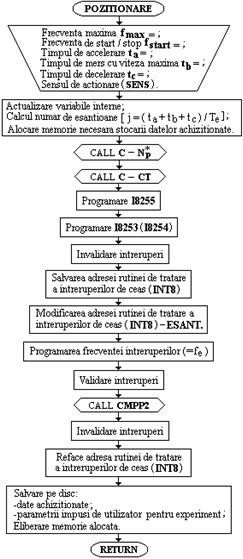
Fig. 17. Organigrama subprogramului de
comanda cu profil prescris.
mers cu viteza maxima tb, timpul de decelerare tc, sensul de actionare dorit (orar=0, antiorar=1), legea de comanda dorita (liniara=0, exponentiala=1).
Organigramele subrutinelor ![]() de calcul al numarului de pasi si C-CT de generare a constantelor de timp pentru
accelerare si decelerare sunt prezentata in Fig. 18 respectiv Fig. 19. Cele 2 regimuri tranzitorii liniare (de
accelerare si de decelerare) sunt separate de un regim stationar in care
motorul efectueaza cu viteza de mers fmax numarul de pasi:
de calcul al numarului de pasi si C-CT de generare a constantelor de timp pentru
accelerare si decelerare sunt prezentata in Fig. 18 respectiv Fig. 19. Cele 2 regimuri tranzitorii liniare (de
accelerare si de decelerare) sunt separate de un regim stationar in care
motorul efectueaza cu viteza de mers fmax numarul de pasi:
![]() (7)
(7)
Algoritmul de generare a
impulsurilor de tact pentru un profil liniar prescris este prezentat in Fig.
20. Pentru comanda MPP este utilizata subrutina CMPP2 (Fig. 21).
Ambele subrutine de generare a impulsurilor de comanda (CMPP1 si CMPP2)
realizeaza si contorizarea pasilor prescrisi ![]() . Astfel, frontul cazator al impulsului de comanda (PC7)
determina incarcarea constantei de timp iar frontul crescator incrementeaza cu
o unitate variabila de contorizare.
. Astfel, frontul cazator al impulsului de comanda (PC7)
determina incarcarea constantei de timp iar frontul crescator incrementeaza cu
o unitate variabila de contorizare.
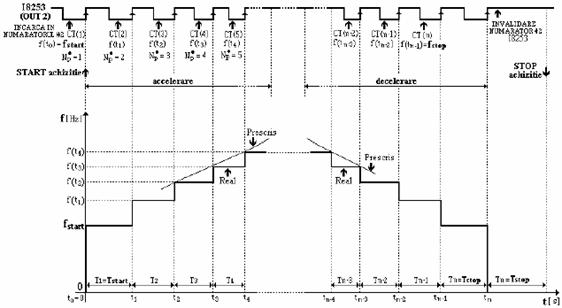
Fig. 20. Algoritmul de generare a impulsurilor de tact pentru un profil liniar prescris.
In continuare sunt prezintate doua cicluri de pozitionare: liniar (Fig. 22) si exponential (Fig. 23). In cazul profilului exponential se observa, la accelerare, o crestere mai rapida a frecventei impulsurilor de comanda in comparatie cu profilul liniar si o scadere mai rapida a acesteia la decelerare.
In Fig. 24 si Fig. 25 este prezentat raspunsul unghiular al motorului in urmatoarele regimuri de functionare: fara amortizare pe ultimul pas (Fig. 24) si cu amortizare electronica prin comanda bang-bang (Fig. 25).
IV. Reglarea numerica automata a vitezei motorului pas cu pas
Comanda sigura a MPP, cu controlul permanent al pozitiei, se realizeaza corect in circuit inchis. In Fig. 26 este prezentata structura sistemului de comanda in circuit inchis realizat cu ajutorul calculatorului IBM-PC486 si al interfetei descrise in paragraful I.
Sistemul de actionare utilizat este cu MPP bifazat, cu 48 pasi/tura, comandat cu ansamblul de circuite integrate specializate L297 (controler), L298N (driver) si cuplat cu un traductor incremental cu 250 imp./tura (1000 imp./tura la iesirea discriminatorului de sens).
Pentru adaptarea numarului de impulsuri furnizate de traductor la cel al pasilor motorului s-a prevazut un circuit de corectie. Acesta este comandat de semnalele oferite de discriminatorului de sens (ORAR, ANTIORAR) si genereaza la o iesire un numar de impulsuri (1008 imp./tura) care se divide cu numarul de pasi pe rotatie ai motorului si la cealalta un numar de impulsuri (48 imp./tura) egal cu numarul de pasi pe rotatie ai motorului (Fig. 27).
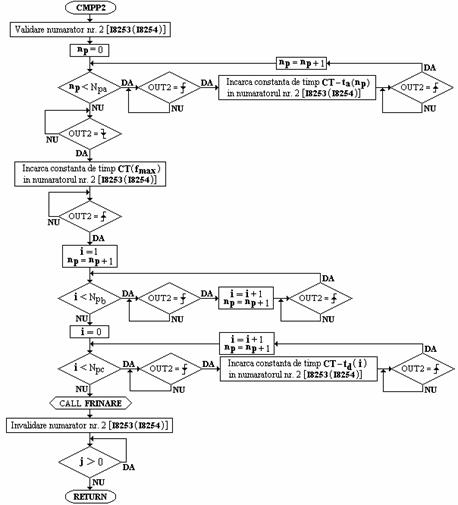
Fig. 21. Organigrama subrutinei de comanda a motorului.
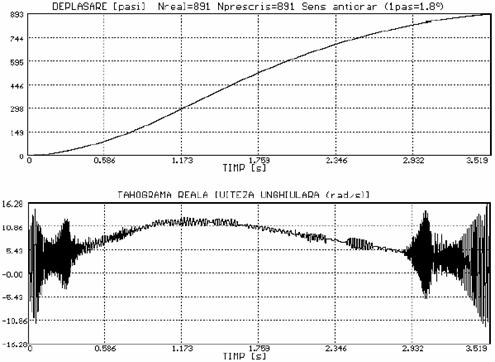
Fig. 22. Comanda MPP cu profil liniar prescris: tahograma prescrisa, tahograma reala
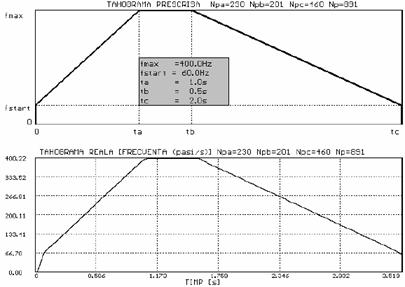
Fig. 22 (continuare). Comanda MPP cu profil liniar prescris: tahograma prescrisa, tahograma reala
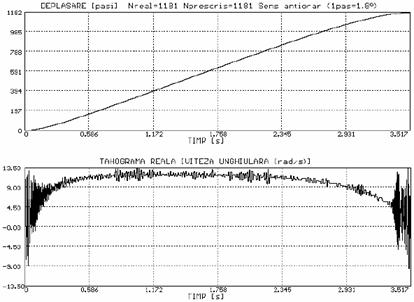
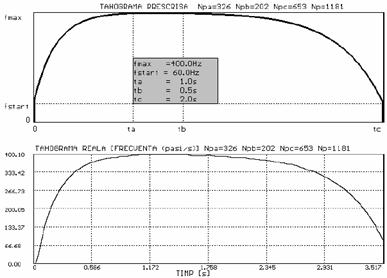
Fig. 23. Comanda MPP cu profil exponential prescris
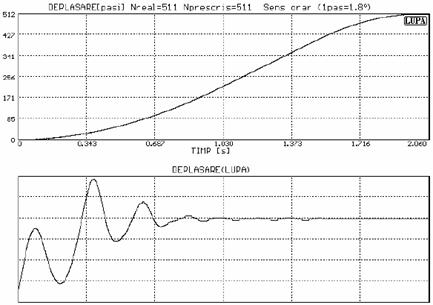
Fig. 24. Comanda MPP cu profil prescris si fara amortizare bang-bang
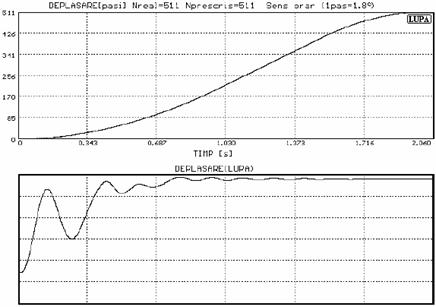
Fig. 25. Comanda MPP cu profil prescris si amortizare bang-bang
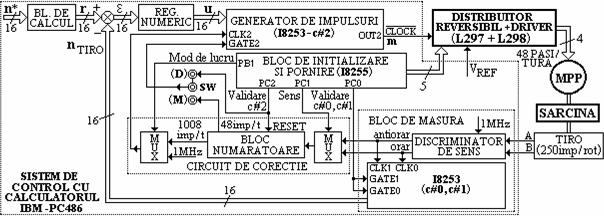
Fig. 26. Schema bloc a sistemului de comanda in circuit inchis a MPP.
Fig. 27. Schema electrica a circuitului de corectie.
Impulsurile de la discriminatorul de sens, selectate prin intermediul multiplexorului I1A (74LS153), sunt aplicate unui numarator-divizor cu 125 (I2, I3: 74LS93). La interval de 1μs dupa frontul descrescator al impulsului 125, cu circuitele basculante monostabile I7 si I8 (CDB4121E) se injecteaza un impuls suplimentar de durata egala cu cea a impulsurilor furnizate de discriminatorul de sens (1μs). Un numarator-divizor cu 21 (I10, I11: 74LS93) permite obtinerea a 48 impulsuri pe o rotatie (un impuls pe pas).
Blocul de masura mai cuprinde canalele #0 si #1 din temporizatorul programabil I8253, programate in modul 0 de lucru (numarator de evenimente). Totodata, numaratorul #2 al acestui circuit este utilizat pentru furnizarea impulsurilor de tact necesare comenzii motorului.
Blocul de initializare si pornire genereaza cu ajutorul iterfetei programabile paralele I8255 semnalul de START si semnalele de comanda necesare blocului de masura si controlerului L297.
Blocul de calcul furnizeaza numarul r de impulsuri intr-o perioada de esantionare corespunzator vitezei prescrise n* [rot./min.].
Regulatorul numeric prelucreaza eroarea de viteza si genereaza comanda u catre elementul de executie. Numaratorul #2 al circuitului I8253, utilizat pentru generarea impulsurilor de TACT (m) necesare comenzii motorului, constituie elementul de executie al sistemului automat de reglare a vitezei MPP.
Sistemul permite reglarea automata dupa un algoritm numeric a vitezei MPP prin doua tehnici selectate cu ajutorul comutatorului SW:
-procesarea intarzierii impulsurilor de reactie (M);
-divizarea impulsurilor de reactie (D).
Programul de comanda in circuit inchis pentru un MPP, intitulat BUCLAMIN, a fost realizat intr-o maniera conversationala in limbajul de programare BorlandC si este alcatuit din 3 subprograme de baza:
-comanda in circuit inchis cu temporizatorul I8253 (canalul #2) programat ca monostabil declansat de impulsurile de reactie (MONOSTABIL);
-comanda in circuit inchis cu temporizatorul I8253 (canalul #2) programat ca divizor al impulsurilor de reactie (DIVIZOR);
-analiza datelor dintr-un fisier (ANALIZA DATE).
Organigrama programului principal este prezentata in Fig. 28.
In acest caz impulsurile obtinute la iesirea 48 IMPULSURI/TURA (un impuls pe pas) a circuitului de corectie sunt aplicate la intrarea de validare GATE2 a numaratorului #2 (I8253). Prin intermediul multiplexorului din cadrul circuitului de corectie, intrarea CLK2 a numaratorului #2 (I8253) se conecteaza la semnalul de tact al interfetei (1MHz).
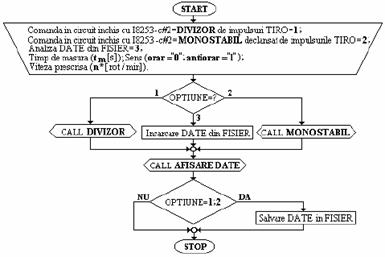
Fig. 28. Organigrama programului principal.
Initial se genereaza doua impulsuri de comanda, dupa
care se incarca in canalul #2 (I8253), programat in modul 1 de lucru
(monostabil declansabil hard), constanta de timp corespunzatoare unghiului
de comutatie ![]() . Modificarea unghiului de comutatie este prezentata in Fig.
29.
. Modificarea unghiului de comutatie este prezentata in Fig.
29.
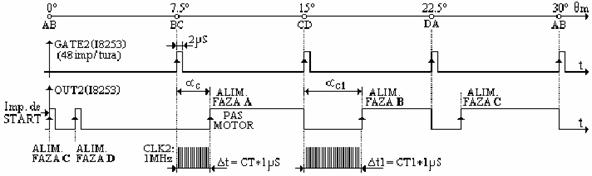
Fig. 29. Modificarea unghiului de comutatie.
Intervalul dintre cele doua impulsuri de comanda trebuie astfel ales incat MPP alimentat in secventa DUBLA sa se deplaseze cu pastrarea sincronismului. Totodata, al doilea impuls de comanda trebuie generat inainte ca motorul sa faca efectiv primul pas. Organigrama subprogramului de comanda este cea din Fig. 30.
Masurarea vitezei motorului se face prin numararea impulsurilor primite de la traductor intr-o perioada de esantionare. Achizitia se realizeaza cu subrutina ACHIZITIE de tratare a intreruperii ceasului de timp real din calculator (INT8). Intreruperea este generata de iesirea numaratorului #0 al circuitului temporizator din calculatorul IBM-PC cu care s-a realizat sistemul de control.
Algoritmul de reglare este numeric de tip PI care asigura o comportare buna in regim tranzitoriu si eroare nula in regim stationar. Discretizand prin metoda dreptunghiului, se obtine formula recursiva de calcul a comenzii:
![]() (8)
(8)
unde
Te=perioda de esantionare=50ms;
Ti=timpul de integrare;
KR=constanta de proportionalitate;
ε(K)=eroarea de viteza;
u(K)=constanta de timp care se incarca in numaratorul #2 (I8253) si care reprezinta intarzierea Δt exprimata in μs (vezi Fig. 29).
Dupa fiecare perioada de esantionare se calculeaza eroare:
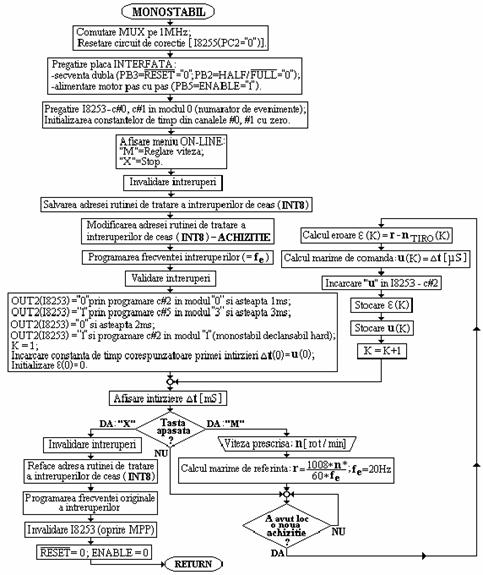
Fig. 30. Organigrama subprogramului de comanda.
![]() (9)
(9)
si apoi noua comanda u(K) care se inscrie in canalul #2 (I8253).
Cunoscand intarzierea Δt programata in I8253 si timpul Te=0.05s dintre doua achizitii in care se numara impulsurile nTIRO de la traductor se calculeaza unghiul de comutatie:
![]() (10)
(10)
Motorul pas cu pas utilizat in acest caz (de fabricatie japoneza SP-57 54425376) este comandat bipolar cu ansamblul de circuite integrate specializate L297-L298 si are urmatoarele caracteristici: unghiul de pas θp=7.5 (48 pasi/tura); tensiunea de alimentare Un=24V; curentul nominal in faza In=0.16A; rezistenta fazei Rm= inductivitatea medie a fazei Lm=90mH. Sistemul realizat cuprinde si dispozitivul performant de incarcare prezentat in paragraful II.
Ca rezultate experimentale sunt prezentate diagramele de variatie in timp ale vitezei MPP si ale intarzierii procesate Δt, in urmatoarele conditii de lucru:
la modificarea referintei (Fig. 31);
la modificarea perturbatiei (Fig. 32).
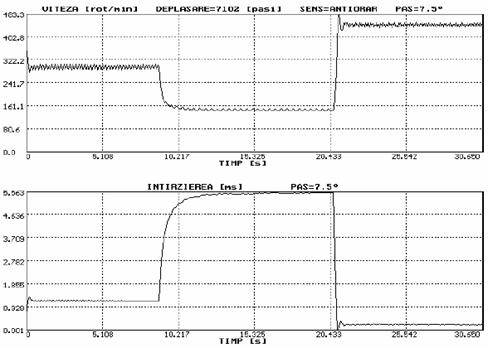
Fig. 31. Evolutia vitezei motorului si intarzierii procesate la modificarea referintei.
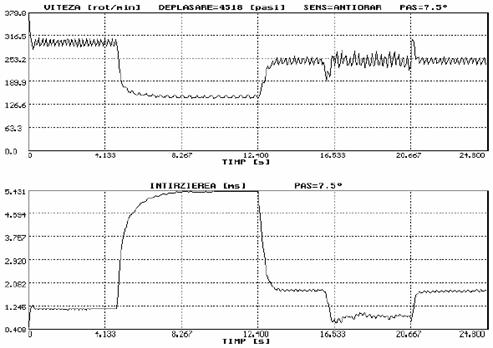
Fig. 32. Evolutia vitezei motorului si intarzierii procesate la modificarea perturbatiei.
Parametrii regulatorului numeric care au condus la aceste rezultate sunt: constanta de proportionalitate KR=4.5, timpul de integrare Ti=0.04s si au fost obtinuti in urma unei acordari euristice. Datorita regulatorului bine acordat se observa cum, la aplicarea socului de sarcina, turatia scade in primul moment (se abate de la valoarea prescrisa), dar apoi ea revine la valoarea impusa.
IV.2 Controlul vitezei MPP prin divizarea impulsurilor de reactie
Aceasta procedura se bazeaza pe impunerea directa a unghiului de comutatie in bucla minora si utilizeaza avantajul prezentei unui traductor incremental cu rezolutie mare. Se valorifica astfel informatia suplimentara data de traductorul incremental (pozitiile intermediare din cadrul unui pas).
In acest caz, cu ajutorul multiplexorului din cadrul circuitului de corectie, intrarea CLK2 a numaratorului #2 (I8253) se conecteaza la iesirea 1008 imp./tura. Modul de lucru impus acestui canal este de divizor programabil, iesirea sa generand un impuls pentru fiecare CT impulsuri primite pe intrarea CLK2. Intrarea de validare GATE2 a aceluiasi numarator se conecteaza la iesirea PC2 a circuitului I8255.
Initial se genereaza impulsul de START, se incarca in numaratorul #2 (I8253) constanta de timp CTSTART (mai mica decat cea corespunzatoare unui pas: CTPAS = 21) si se asteapta furnizarea primului impuls catre motor (corespunzator alimentarii fazei D din combinatia CD). Modificarea unghiului de comutatie este prezentata in Fig. 33.

Fig. 33. Modificarea unghiului de comutatie.
Unghiul de comutatie initial in acest caz este:
![]() (11)
(11)
Dupa acest impuls se incarca in numaratorul #2 (I8253) constanta 21 corespunzatoare unui pas (CTPAS), care asigura functionarea MPP la unghi de comutatie constant. Organigrama subprogramului de comanda este prezentata in Fig. 34.
Modificare a unghiului de comutatie are loc dupa urmatoarea lege de comanda:
![]() , (12)
, (12)
In relatia (12) ![]() reprezinta incrementul
comenzii care se calculeaza dupa algoritmul:
reprezinta incrementul
comenzii care se calculeaza dupa algoritmul:
 (13)
(13)
unde
ε(k)=eroarea de viteza;
εP1 si εP2 sunt doua valori de prag;
θP=7.5° este unghiul de pas al motorului.
Alegerea constantei K s-a facut experimental, obtinandu-se performante bune pentru:
![]() (14)
(14)
Ca rezultate experimentale sunt prezentate diagramele de variatie in timp ale vitezei MPP si ale unghiului de comutatie, in urmatoarele conditii de lucru:
la modificarea referintei (Fig. 35);
la modificarea perturbatiei (Fig. 36).
In acesta varianta unghiul de comutatie poate avea si valori negative. Acest lucru conduce la timp de raspuns mai mic si viteza de regim stationar mai mare. Valoarea P/21 a treaptei de variatie a comenzii poate fi mult redusa prin utilizarea unui traductor cu rezolutie mai mare.
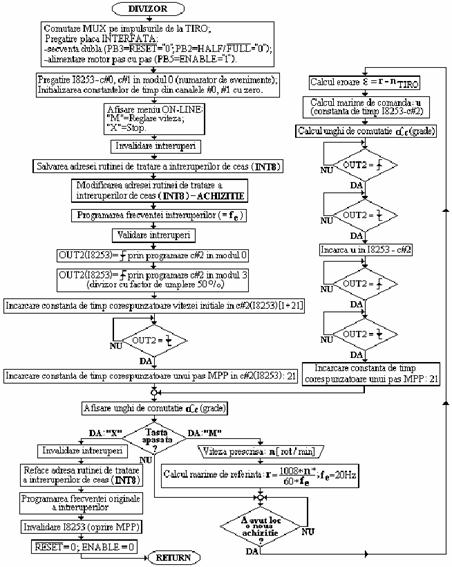
Fig. 34. Organigrama subprogramului de comanda.
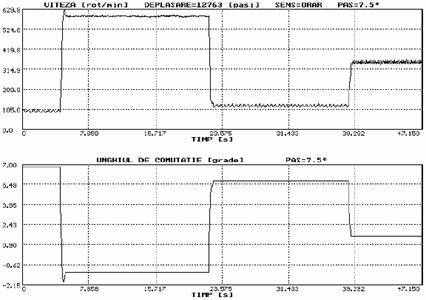
Fig. 35. Evolutia vitezei motorului si unghiului de comutatie la modificarea referintei.
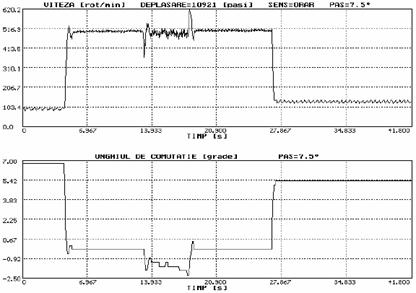
Fig. 36. Evolutia vitezei motorului si unghiului de comutatie la modificarea perturbatiei.
V. Proiectarea si realizarea unui sistem de conducere in circuit inchis, fara traductor incremental de pozitie, a motorului pas cu pas cu reluctanta variabila
Realizarea practica a unui sistem de comanda in bucla inchisa cu traductor incremental se loveste de cateva dezavantaje esentiale, si anume:
traductorul incremental este un element scump, uneori mai scump chiar decat MPP, fapt pentru care, in unele cazuri, solutia cuplarii pe arborele MPP a unui traductor incremental este nerationala;
traductorul incremental este sensibil la praf, perturbatii electromagnetice si socuri mecanice.
Aceste dezavantaje au condus la ideea eliminarii traductorului de unghi din structura MPP in bucla inchisa, pastrand totusi principiul comenzii in spiritul conversiei biunivoce impuls de comanda-pas. Ideea de baza consta in aceea ca se poate obtine o informatie asupra pozitiei rotorului fata de stator, prin exploatarea modificarilor pe care le produce variatia unghiului asupra formei de unda a curentului din fazele motorului.
A aparut astfel o tehnica noua de comanda a motorului pas cu pas in bucla minora (folosind reactia de curent in locul celei de unghi) dand posibilitatea inlocuirii unui traductor de unghi, scump si sensibil, cu unul de curent, ieftin si robust [1], [9], [11].
Este cunoscut ca forma de unda a curentilor in fazele MPP, mai ales in cazul celor cu reluctanta variabila, prezinta puncte de extrem, in anumite domenii de viteza. Impulsurile de rotatie pentru comanda in circuit inchis a MPP pot fi obtinute prin detectarea acestor puncte de extrem, puncte determinate de viteza motorului, tensiunea de alimentare, circuitul de supresare, rezistenta ohmica a fazelor si de variatia inductivitatii fazelor cu unghiul la arbore. Schema de principiu a sistemului de comanda in circuit inchis a MPP fara traductor de pozitie este prezentata in Fig. 37.
Impulsurile de reactie pentru comanda in circuit inchis a motorului sunt obtinute prin detectarea primului punct de extrem-de tip minim-din forma de unda a curentului care se stabileste in faza comandata. Pentru detectarea acestor curenti, in driver s-a prevazut un traductor de tip SUNT.
Tensiunea furnizata de traductorul de curent, amplificata de amplificatorul A realizat cu circuitul TL084 (I13B, Fig. 38), se aplica pe intrarea inversoare a comparatorului COMP (I13A, Fig. 38). Pe intrarea neinversoare a aceluiasi comparator se aplica un nivel pozitiv de tensiune cu ajutorul potentiometrului multitur P2 (R19, Fig. 38) [5], [6].
Printr-o logica combinationala simpla se genereaza impulsurile de tact pentru numaratorul sincron reversibil NR obligat sa numere inapoi dintr-o stare initiala impusa cu ajutorul butonului INCARCARE si al dispozitivului numeric DPN de prescriere a numarului de pasi ce trebuiesc realizati de motor. Numaratorul reversibil NR este realizat din doua numaratoare decadice sincrone reversibile CDB 4192 (I1, I2, Fig. 38), existand astfel posibilitatea prescrierii unui numar de pasi cuprins intre 1 si 99.
In momentul golirii numaratorului reversibil NR, circuitul de sesizare a trecerii prin zero CTZ (un SAU cu 8 intrari format din circuitul I5-CDB 430 si cele 8 inversoare I6, I7, Fig. 38) blocheaza poarta P de acces a impulsurilor de comanda TACT catre distribuitor. Totodata, starea numaratorului este decodificata (blocul DEC) si afisata prin intermediul celulelor CA.
Fig. 37. Schema bloc a sistemului de comanda in circuit inchis fara traductor de pozitie.
Fig. 39. Diagramele temporale pentru sistemul de comanda in circuit inchis fara traductor de pozitie.
Din diagramele temporale prezentate in Fig. 39 se observa ca numarul impulsurilor furnizate de acest traductor coincide cu numarul pasilor efectuati de MPP. Astfel comanda distribuitorului de impulsuri (secventa SIMPLA) este prelungita pana cand MPP realizeaza un numar de pasi egal cu cel prescris.
In Fig. 40 este reprezentata instalatia experimentala realizata, avand urmatoarele componente:
Sertarul conceput pentru cartele format simplu eurocard, avand dispuse pe laterala din stanga transformatorul de alimentare, blocul de redresare si filtrare, sursa reglabila de tensiune de fortare U1=40V, iar pe laterala din dreapta este dispus MPP si o frana mecanica, care totusi permite o incarcare progresiva a motorului cu un cuplu rezistent de frecare.
Sursele stabilizate de tensiune: 5V/3A (P6) pentru partea de comanda si U2=7V/3A (P7) necesara alimentarii MPP.
Generatorul programabil de impulsuri de comanda (P3).
Fig. 38. Schema electrica a sistemului de comanda in circuit inchis fara traductor de pozitie.
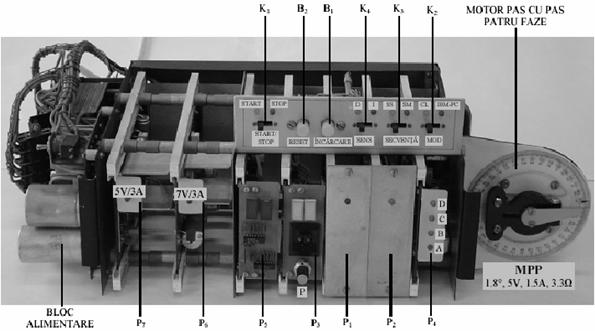
Fig. 40. Aspectul general al sistemului de comanda in circuit inchis fara traductor incremental.
Traductorul de curent care inlocuieste traductorul de unghi (P5).
Distribuitoarele de impulsuri pentru secventa SIMPLA (P1) si MIXTA (P2).
Driver-ul cu tehnica de fortare: alimentare cu doua tensiuni (P4).
Panoul frontal care cuprinde:
-butonul INCARCARE (B1);
-butonul RESET (B2)
-comutatorul![]() (K1);
(K1);
-comutatorul MOD (K2), prin intermediul caruia se impune modul de lucru: CLASIC sau CALCULATOR;
-comutatorul secventei dorite: SIMPLA sau MIXTA (K3);
-comutatorul SENS (K4).
Elementul principal al instalatiei experimentale il constituie MPP tetrafazat fabricat la Electromotor Timisoara, avand urmatoarele caracteristici: puterea absorbita P=10W, unghiul de pas θp=1.8° (200 pasi/tura), tensiunea nominala de alimentare Un=5V, curentul nominal in infasurare In=1.5A, rezistenta medie a fazei Rm=3.3Ω, inductivitatea medie a fazei Lm=3.6mH, cuplul static sincronizant Mmax=0.3N·m, frecventa maxima de mers in gol fPM=550Hz.
Ca rezultate experimentale sunt prezentate oscilogramele curentilor prin fazele MPP in diferite conditii de lucru:
frecventa de comanda de 1KHz si incarcare nominala (Fig. 41);
frecventa de comanda de 60 Hz dar tot in conditii de sarcina nominala (Fig. 42);
frecventa scazuta de comanda si sarcina redusa la arbore (Fig. 43).
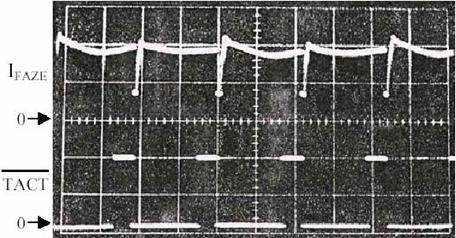
Fig. 41. Oscilograma curentilor din fazele MPP la inalta frecventa si sarcina nominala (0.75A/div.; 0,5ms/div.).
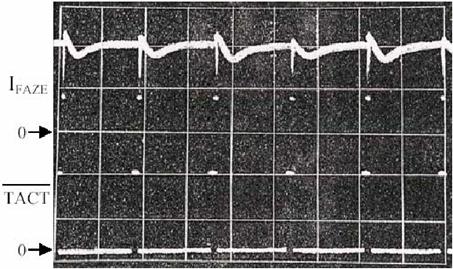
Fig. 42. Oscilograma curentilor din fazele MPP la joasa frecventa si sarcina nominala (0.75A/div.; 8ms/div.).
Aliura
curentului din fazele motorului in cazul unei functionari incorecte cu pierdere
de pasi este prezentata in Fig. 44. Totodata, sunt prezentate si impulsurile de comanda ![]() active pe frontul
descrescator.
active pe frontul
descrescator.
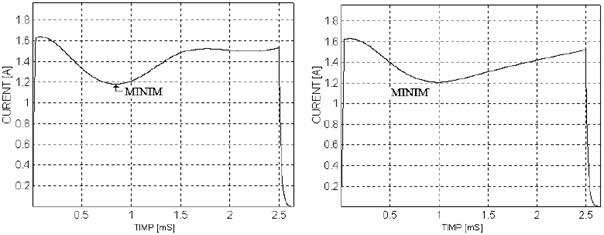
Rezultatele experimentale confirma concluziile desprinse si din simularea numerica (Fig. 45): forma de unda a curentului in faza alimentata inregistreaza puncte de extrem. Primul dintre acestea - un punct de minim - ofera o informatie asupra pozitiei rotorului si sta la baza functionarii traductorului de curent mai sus prezentat [4], [5], [7].
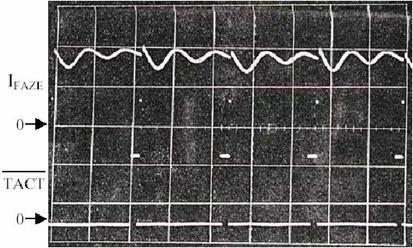
Fig. 43. Oscilograma curentilor din fazele MPP la joasa frecventa si sarcina scazuta (0.75A/div.; 8ms/div.).
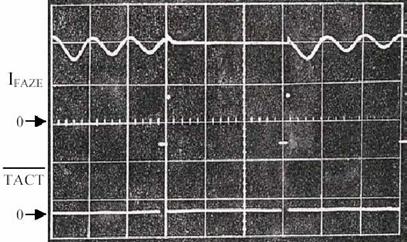
Fig. 44. Oscilograma curentilor din fazele MPP in cazul functionarii cu pierdere de pasi (0.75A/div.; 10ms/div.).
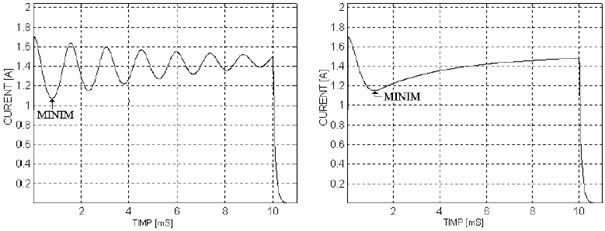
a) Frecventa coborata si sarcina redusa. b) Frecventa coborata si sarcina nominala.
Fig. 45. Oscilogramele curentilor din fazele MPP obtinute prin simulare (MATLAB-SIMULINK).
BIBLIOGRAFIE
[1] Acarnley P.P., Stepping Motors: a Guide to Modern Theory and Practice, 4-th Edition, Institution of Electrical Engineers, London, 2003.
a) Frecventa ridicata si sarcina redusa. b) Frecventa ridicata si sarcina nominala.
Fig. 45 (Continuare). Oscilogramele curentilor din fazele MPP obtinute prin simulare (MATLAB-SIMULINK).
[2] Barry B.B., The 8086/8088 Microprocessor, Architecture, Programming and Interfacing, Merrill Publishing Company, Columbus, 1987.
[3] Baluta Gh. Computer Aided
Monitoring of the Two-Phase Bipolar Stepper Motors,
[4] Baluta Gh. Open-Loop Control of a Bipolar Stepper Motors Using the Specialized Integrated Circuits The Annals of Dunarea de Jos University of Galati, Fasc. III, Electrotechnics-Electronics-Automatic Control-Informatics, pp. 53
[5] Baluta Gh., Actionari electrice cu motoare pas cu pas, Editura Gheorghe Asachi, Iasi, 2003.
[6] Baluta Gh., Actionari electrice de mica putere. Aplicatii, Editura Politehnium, Iasi, 2004.
Baluta Gh., Papahatzis N., Numerical Simulation of the Closed-Loop Control of Electrical Drive Systems with Stepper Motors, Proceedings of the 6-th International Symposium on Advanced Electromechanical Motion Systems-ELECTROMOTION 2005, 27-29 September 2005, Lausanne, Switzerland, Full paper on CD-ROM (paper_DS2_01_EM05-137).
Baluta Gh., Computer Based Control of the Four-Phase Unipolar Stepper Motors, Proceedings of the 5-th International Conference on Electromechanical and Power Systems-SIELMEN 2005, ISBN: 973-716-230-7, 6-8 October 2005, Chisinau, Republica Moldova, Vol. II, pp. 563
[9] Kenjo T., Sugawara A., Stepping Motors and Their Microprocessor Controls, Second Edition, Clarendon Press, Oxford, 2003.
[10] Kernigham M.W., Ritchie D.M. The C Programming Language, Second Edition, Prentice Hall, Englewood Cliffs, New Jersey, 1988.
[11] Kuo B.C., Kelemen A., Crivii M., Trifa V. Sisteme de comanda si reglare incrementala a pozitiei, Editura Tehnica, Bucuresti, 1981.
Stepping Motors and Associated Electronics, PHILIPS, Data Book, 1981.
Turbo C., Borland, User's Guide & Reference Manual, 1988.
Industrial and Computer Peripheral ICs, SGS-THOMSON, Data Book, 1988.
Hybrid Step Motor Systems Catalog, PACIFIC SCIENTIFIC, Data Book, Rockford, 1991.
Integrated Circuits. Product & Applications, UNITRODE, Handbook, 1993-1994.
Industrial Circuits Data Book and Stepper Motor Control Handbook, ERICSSON COMPONENTS AB, 1995.
Matlab for Windows, User's Guide, 1992.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |