TEMA: Reprezentarea punctului. Sisteme de coordonate. Reprezentarea dreptei. Drepte simplu si dublu particulare.
1. Generalitati
|
|
a) Sistemul de proiectie ortogonal
Toate reprezentarile grafice ale produselor tehnice utilizeaza sistemul de proiectie ortogonal. Imaginile semnificative ale obiectului reprezentat se obtin pe trei plane, reciproc perpendiculare intre ele, al caror ansamblu se numeste triedru de proiectie. Fata de aceste plane, directiile de proiectie sunt intotdeauna perpendiculare si dreptele care le materializeaza se numesc drepte proiectante. In figura 1 proiectia triunghiului ABC pe planul [P] este triunghiul abc. Punctul b din [P] reprezinta proiectia pe planul ]P] a punctului B din spatiu deoarece este intersectia dintre dreapta proiectanta Bb si [P], dreapta Bb fiind perpendiculara pe planul [P]. Folosind notatii matematice scriem:
![]() [P] . Fig.
1
[P] . Fig.
1
In figura 2 sunt reprezentate intuitiv planele care formeaza triedrul de proiectie. Ele se numesc dupa cum urmeaza: planul orizontal notat [H]; planul vertical, notat [V] si planul lateral (sau plan de profil), notat [W].
Prin intersectarea lor rezulta axele sistemului de proiectie notate cu OX, OY si OZ:
![]() ;
; ![]() ;
; ![]() .
.
Intersectiile celor trei axe reprezinta punctul O - originea sistemului de coordonate:
![]()
|
|
Fig. 2 Fig. 3
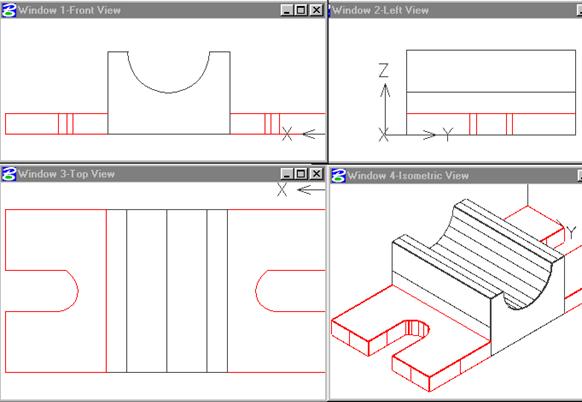
Toate programele de proiectare asistata de calculator au implementat sistemul de proiectie ortogonal. In figura 4 este prezentata fereastra programului MicroStation 95. Un fisier care contine o reprezentare tridimensionala (3D) va prezenta utilizatorului acele ferestre necesare pentru vizualizarea proiectiilor obiectului. Proiectarea se face in spatiu, programul generand vederile (proiectiile obiectului pe cele trei plane).
b) Reprezentarea in tripla proiectie ortogonala.
Procesele de fabricatie se bazeaza pe desene de executie care sunt reprezentari in plan ale obiectelor. Trecerea de la obiectul real din spatiu la reprezentarea sa in plan se face considerand ca planele orizontal si lateral, impreuna cu proiectiile pe care le contin, se rotesc in jurul axelor OX si respectiv OZ pana cand se suprapun peste planul vertical, asa cum se arata in figura 2. O astfel de reprezentare plana (figura 3) se numeste tripla proiectie ortogonala. Ea sta la baza regulilor de dispunere a proiectiilor in desenul tehnic si este implementata in orice program de proiectare asistata de calculator.
Observatie: Daca se utilizeaza doar planele orizontal si vertical atunci spunem ca se foloseste dubla proiectie ortogonala sau epura Monge (geometrul care a introdus-o - Gaspard Monge 1746 - 1818).
|
|
Fig. 4
2. Reprezentarea punctului
Punctul reprezinta o entitate geometrica adimensionala, caracterizata in spatiul tridimensional prin pozitia sa exprimata prin trei coordonate, notate x, y, z. Notatia obisnuita a unui punct in geometria analitica, mecanica etc. este A (x, y, z). In geometria descriptiva coordonatele punctului poarta numele de coordonate descriptive si sunt (vezi figura 5):
|
|
Fig. 5 Fig. 6
- abscisa: distanta de la punct la planul lateral de proiectie;
- departarea: distanta de la punct la planul vertical de proiectie;
- cota: distanta de la punct la planul orizontal de proiectie.
Proiectiile punctului pe cele trei plane sunt puncte rezultate din intersectia proiectantelor din punct cu planele de proiectie si se numesc:
![]() : proiectia orizontala;
: proiectia orizontala; ![]() : proiectia verticala;
: proiectia verticala; ![]() : proiectia laterala.
: proiectia laterala.
In epura proiectiile punctului se reprezinta prin transpunerea coordonatelor cunoscute, tinand cont de semnul acestora, asa cum se arata in figura 6.
3. Modalitati de exprimare a coordonatelor unui punct
Atunci cand se utilizeaza un program de proiectare asistata de calculator, reprezentarea punctelor (necesare pentru definirea de noi entitati geometrice sau pentru modificarea pozitiilor entitatilor existente) se poate face indicand coordonatele acestora: a) prin valori numerice sau b) prin definitii (Snap Modes).
a) Exprimarea coordonatelor unui punct prin valori numerice se poate face in doua modalitati:
1 - utilizand coordonatele absolute ale punctului;
2 - utilizand coordonatele relative ale punctului (coordonatele sale in raport cu un alt punct deja definit).
|
|
Fig. 7 Fig. 8
1) Utilizarea coordonatelor absolute (identice cu coordonatele descriptive - abscisa, departarea, cota) presupune cunoasterea pozitiei punctului in raport cu originea sistemului de coordonate curent (activ). Tinand cont de faptul ca aceasta origine se defineste dupa anumite necesitati si se modifica pe parcursul procesului de reprezentare, este dificil sa se indice coordonatele absolute ale punctelor. In figura 7 este reprezentat punctul A. In sistemul de coordonate XOYZ coordonatele sale absolute sunt A (20, 40, 60), dar fata de sistemul de coordonate X 1O 1Y 1Z 1 (OO 1 = 20) coordonatele lui absolute sunt A(20, 40, 40). Din figura 8 se observa ca si reprezentarea ortogonala se modifica, pentru cele doua sisteme de coordonate diferind pozitia proiectiei orizontale a punctului.
|
|
Fig. 9 Fig. 10
2) Pentru a evita greselile ce pot fi provocate de indicarea coordonatelor absolute ale punctelor, in desenarea in plan (2D) sau modelarea spatiala (3D) este preferabil sa se defineasca pozitia unui punct fata de un alt punct, deja reprezentat. Coordonatele absolute se inlocuiesc cu variatiile lor, notate Dx, Dy, Dz si definite astfel: Dx = x 2 - x 1, Dy = y 2 - y 1, Dz = z 2 - z 1, aceste valori avand semnul algebric corespunzator. In figurile 9 si 10 coordonatele absolute fata de sistemul XOYZ ale punctului B sunt B (35, 20, 15). Daca punctul A(20, 40, 60) este deja reprezentat atunci pentru reprezentarea punctului B se pot folosi coordonatele sale relative in raport cu A, adica B(Dx, Dy, Dz) = B(15, -20, -45).
4. Reprezentarea dreptei
|
|
Dreapta este entitatea geometrica rezultata in spatiu prin deplasarea rectilinie a unui punct P din pozitia p 1 in pozitia p 2 (figura 11). Definirea unei drepte in spatiu se poate face in doua moduri de baza:
a) prin doua puncte date (punctele P1 si P2);
b) printr-un punct si o directie (punctul P si directia Δ); Fig. 11
(sau ca intersectia a doua plane).
|
|
Proiectia unei drepte din spatiu pe un plan este:
- un punct, daca dreapta este perpendiculara pe planul de proiectie respectiv (adica intersecteaza planul de proiectie sub un unghi a p
- o dreapta, daca dreapta nu este perpendiculara pe planul de proiectie (a p 2). Aceasta situatie corespunde cazurilor in care dreapta din spatiu intersecteaza planul de proiectie sau este paralela cu acesta (a p
Fig. 12
In figura 12 dreptele (mn) si (ef) reprezinta proiectiile pe planul [P] ale dreptelor (MN) si (EF) din spatiu. Pentru ca (EF) [P], segmentele EF si ef sunt egale. Proiectia pe planul [P] a dreptei (QR) este un punct ce coincide cu proiectiile q ≡ r (confundate) ale punctelor Q si R de pe dreapta deoarece (QR) [P].
Reprezentarea unei drepte in tripla proiectie ortogonala se obtine prin unirea proiectiilor de acelasi nume ale punctelor care definesc dreapta. In figurile 13 si 14 dreapta (D) este determinata de punctele A(20, 40, 60) si C(40, 5, 20).
|
|
Fig. 13 Fig. 14
Folosind
notatii specifice:![]() si
si ![]() , adica:
, adica:
"Dreapta (D) este determinata de punctele A si C si are proiectiile d, d' si d''. Spunem ca:
- proiectia orizontala este notata cu d si rezulta prin unirea proiectiilor orizontale a si c ale punctelor A si C;
- proiectia verticala este notata cu d' si rezulta prin unirea proiectiilor verticale a' si c' ale punctelor A si C;
- proiectia laterala este notata cu d'' si rezulta prin unirea proiectiilor laterale a'' si c'' ale punctelor A si C.
4.1 Apartenenta unui punct la o dreapta
Deoarece o dreapta reprezinta o multime de puncte, este important sa se poata verifica grafic, daca un punct, de coordonate cunoscute, apartine unei drepte, de asemenea cunoscuta. Pentru ca tripla proiectie ortogonala stabileste o legatura biunivoca intre punctele din spatiu si reprezentarea lor in epura, se poate enunta urmatoarea teorema:
|
T 1 |
Un punct apartine unei drepte din spatiu daca proiectiile sale apartin proiectiilor de acelasi nume ale dreptei. |
Utilizand exprimarea matematica: ![]() . In figurile 13 si 14 punctul M apartine dreptei
(D) pentru ca proiectia sa orizontala m apartine
proiectiei orizontale d a dreptei (D) si proiectiile sale m'
si m'' apartin proiectiilor verticala si respectiv
laterala ale dreptei.
. In figurile 13 si 14 punctul M apartine dreptei
(D) pentru ca proiectia sa orizontala m apartine
proiectiei orizontale d a dreptei (D) si proiectiile sale m'
si m'' apartin proiectiilor verticala si respectiv
laterala ale dreptei.
In plus, M reprezinta mijlocul segmentului AC adica AM MC . Din figura 14 se observa ca punctele m, m' si m'' reprezinta si ele mijloacele segmentelor ac, a'c' si a''c''. Aceasta afirmatie se poate demonstra usor cu ajutorul teoremei lui Thales si ea constituie una dintre proprietatile proiectiei ortogonale:
|
P 1 |
In proiectia ortogonala raportul simplu se pastreaza. |
5. Drepte simplu si dublu particulare
Asa cum se observa din figurile 13 si 14, dreapta (D) este o dreapta inclinata fata de toate planele de proiectie. O astfel de dreapta se numeste dreapta oarecare.
Daca o dreapta este paralela cu unul dintre planele de proiectie ea face parte din categoria dreptelor simplu particulare.
Daca o dreapta este paralela cu doua dintre planele de proiectie (sau altfel spus, este perpendiculara pe unul dintre planele de proiectie) ea face parte din categoria dreptelor dublu particulare.
a) Din categoria dreptelor simplu particulare fac parte:
1) dreapta paralela cu planul orizontal de proiectie, (D 1) [H] numita dreapta de nivel (sau orizontala);
2) dreapta paralela cu planul vertical de proiectie, (D 2) [V] numita dreapta de front (sau frontala);
|
|
3) dreapta paralela cu planul lateral de proiectie, (D 3) [W] numita dreapta de profil.
Fig. 15 Fig. 16
In figurile 15 si 16 este reprezentat spatial si in epura segmentul (MN), definit de punctele M(45, 20, 20) si N(10, 50, 20). Segmentul MN este paralel cu planul [H] deoarece cotele punctelor M si N sunt egale (z M = z N = 20). Din figura 16 se observa ca proiectiile verticala (m'n') si laterala (m''n'') ale segmentului de dreapta orizontala sunt paralele cu axa OX.
|
|
Fig. 17 Fig. 18
In figurile 17 si 18 este exemplificata reprezentarea in proiectie ortogonala a dreptei frontale si respectiv a dreptei de profil.
Segmentul (QP) [Q(45, 15, 50), P(10, 15, 20)] este paralel cu planul T (D 4) [V];
2) dreapta paralela cu planele orizontal si vertical numita dreapta fronto-orizontala, adica: T (D 5) [W];
3) dreapta paralela cu planele vertical si lateral numita dreapta verticala, adica: T (D 6) [H].
In figurile 19 si 20 este reprezentat spatial si in epura segmentul (AB), definit de punctele A (30, 10, 25) si B (30, 40, 25). Segmentul AB este perpendicular pe planul [V] deoarece abscisele punctelor A si B si cotele punctelor A si B sunt egale (x A = x B = 30 si z A = z B = 25). Din figura 19 se observa ca proiectia verticala este un punct, iar proiectiile orizontala si laterala ale segmentului de dreapta de capat sunt perpendiculare pe OX si respectiv OZ.
|
|
Fig. 19 Fig. 20
|
|
In figura 21 este repre-zentat ortogonal un segment de dreapta fronto-orizontala, (CD) . Segmentul (CD) [W] si deci proiectia sa laterala este un punct iar proiectiile orizontala (cd) si verticala (c'd') sunt paralele cu OX.
In figura 22 este exem-plificata reprezentarea ortogo-nala a unui segment de dreapta verticala, (EF) . Fig. 21 Fig. 22
Segmentul (EF) [H] si prin urmare proiectia sa orizontala este un punct iar proiectiile verticala (e'f') si laterala (e''f'') sunt paralele cu OZ.
BIBLIOGRAFIE
1. VRACA Ileana DESEN INDUSTRIAL Editura Tehnica Bucuresti 1984 (Cap. 7 Reprezentarea, sectionarea si intersectarea corpurilor geometrice uzuale pag. 63 - 69)
2. VASILESCU Elisabeta si colectiv DESEN TEHNIC INDUSTRIAL (Elemente de proiectare) Editura Tehnica Bucuresti 1994 Cap. 1 Elemente grafice de baza ale proiectarii ingineresti pag. 7, 8, 11, 12)
3. PRECUPETU Paul, DALE Constantin PROBLEME DE GEOMETRIE DESCRIPTIVA CU APLICATII IN TEHNICA Editura Tehnica Bucuresti 1987 (Cap. 1 Punct, dreapta, plan pag. 13 - 39)
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |